
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (8): 2629-2645.doi: 10.12382/bgxb.2023.0620
Previous Articles Next Articles
LU Hang1,2, LIU Haoran1,3, CHEN Tairan1,3,*( ), HUANG Biao1,3, WANG Guoyu1,3, CHEN Huiyan1
), HUANG Biao1,3, WANG Guoyu1,3, CHEN Huiyan1
Received:2023-07-03
Online:2023-11-06
Contact:
CHEN Tairan
CLC Number:
LU Hang, LIU Haoran, CHEN Tairan, HUANG Biao, WANG Guoyu, CHEN Huiyan. Experimental and Numerical Study on Navigation Characteristics of Waterjet Propulsion Amphibian Vehicle[J]. Acta Armamentarii, 2024, 45(8): 2629-2645.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Test pool and trailer
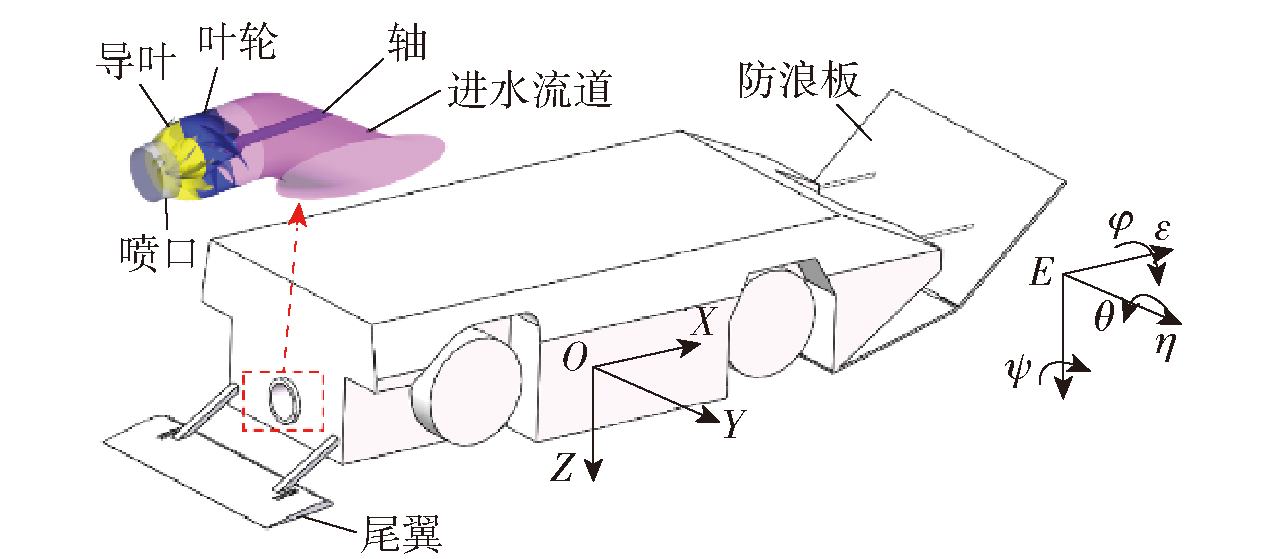
Fig.2 Schematic diagram of amphibious vehicle model
| 参数 | 数值 |
|---|---|
| 两栖车总长L/m | 2.14 |
| 两栖车总宽B/m | 0.87 |
| 两栖车高/m | 0.52 |
| 两栖车质量M/kg | 240.05 |
| 喷水推进器叶轮直径/mm | 149.5 |
| 喷水推进器喷口直径/mm | 105 |
| 喷水推进器转速/(r·min-1) | 2286 |
| 喷水推进器流量/(m3·s-1) | 0.108 |
| 喷水推进器扬程/m | 7.12 |
| 喷水推进器叶轮叶片数 | 6 |
| 喷水推进器导叶叶片数 | 8 |
Table 1 Parameters of amphibious vehicle and waterjet propulsor
| 参数 | 数值 |
|---|---|
| 两栖车总长L/m | 2.14 |
| 两栖车总宽B/m | 0.87 |
| 两栖车高/m | 0.52 |
| 两栖车质量M/kg | 240.05 |
| 喷水推进器叶轮直径/mm | 149.5 |
| 喷水推进器喷口直径/mm | 105 |
| 喷水推进器转速/(r·min-1) | 2286 |
| 喷水推进器流量/(m3·s-1) | 0.108 |
| 喷水推进器扬程/m | 7.12 |
| 喷水推进器叶轮叶片数 | 6 |
| 喷水推进器导叶叶片数 | 8 |
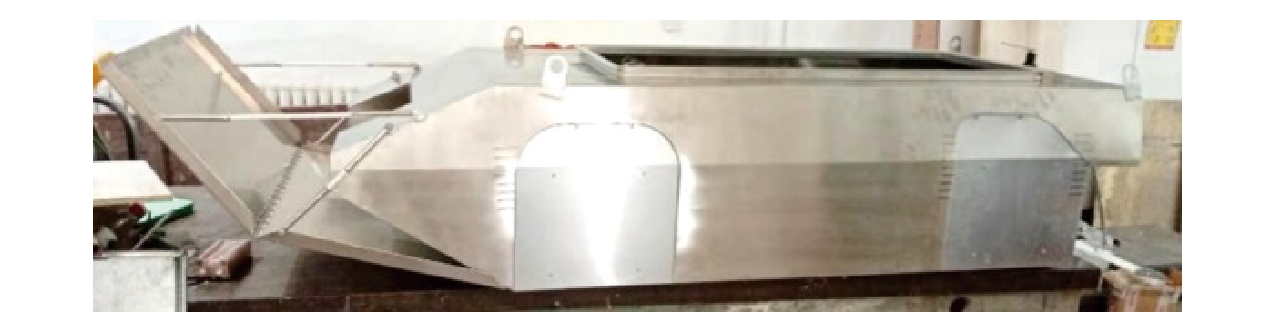
Fig.3 Amphibious vehicle model
| 名称 | 参数 | 量程 | 精度 |
|---|---|---|---|
| 拖车 | 速度/(m·s-1) | 0.1~8.0 | 0.001 |
| 阻力传感器 | 力/N | 1000 | 0.0005 |
| 三向测力天平 | 力/N | 500 | 0.001 |
| 纵摇传感器 | 角度/(°) | 45 | 0.1 |
| 升沉传感器 | 升沉值/mm | 800 | 0.1 |
| 转矩转速功率 测量仪 | 转矩/(N·m) 转速/(r·min-1) | -99999~99999 0~20000 | 不超过 ±0.5%FS |
Table 2 Test bench instrument and equipment parameters
| 名称 | 参数 | 量程 | 精度 |
|---|---|---|---|
| 拖车 | 速度/(m·s-1) | 0.1~8.0 | 0.001 |
| 阻力传感器 | 力/N | 1000 | 0.0005 |
| 三向测力天平 | 力/N | 500 | 0.001 |
| 纵摇传感器 | 角度/(°) | 45 | 0.1 |
| 升沉传感器 | 升沉值/mm | 800 | 0.1 |
| 转矩转速功率 测量仪 | 转矩/(N·m) 转速/(r·min-1) | -99999~99999 0~20000 | 不超过 ±0.5%FS |
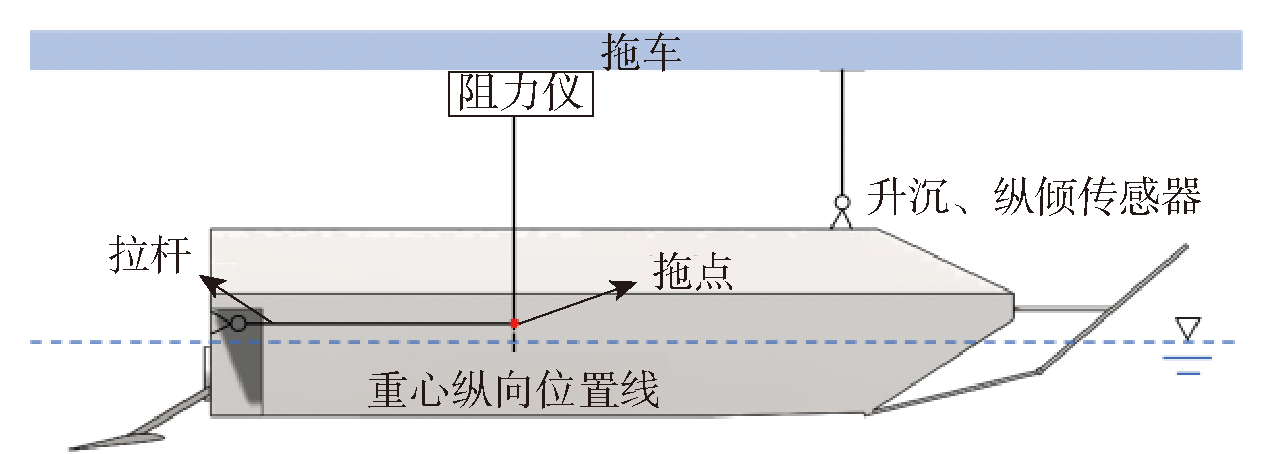
Fig.4 Schematic diagram of towing device
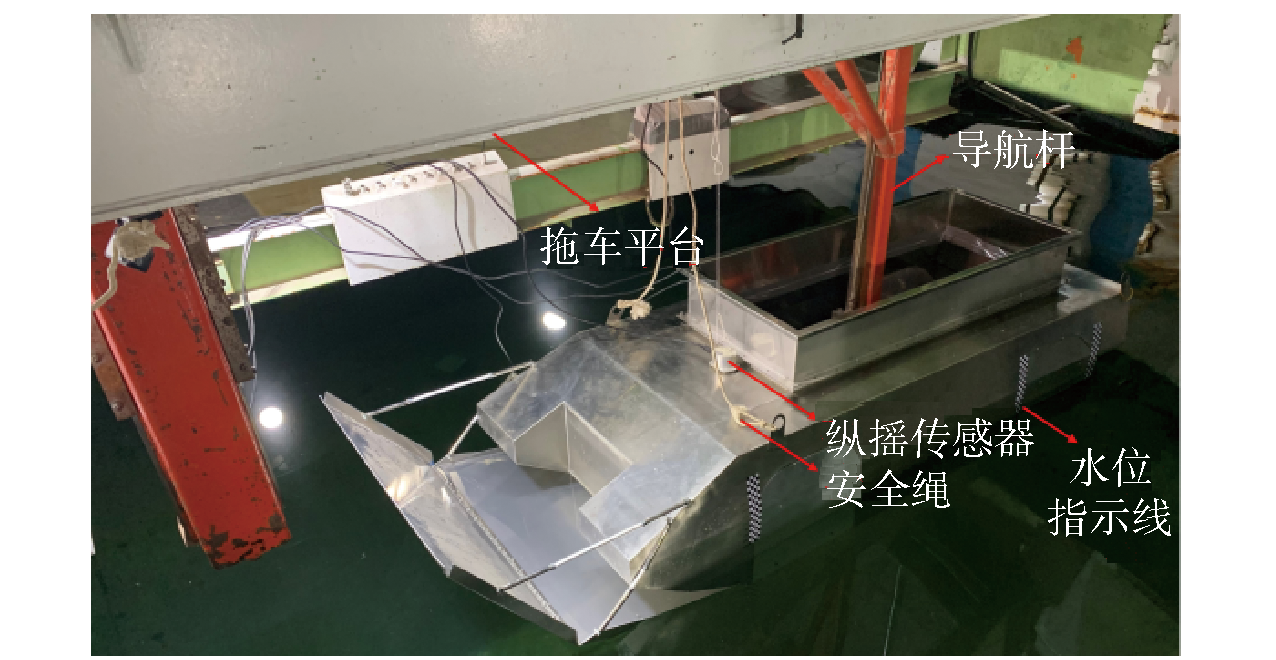
Fig.5 Installation schematic diagram of amphibious vehicle
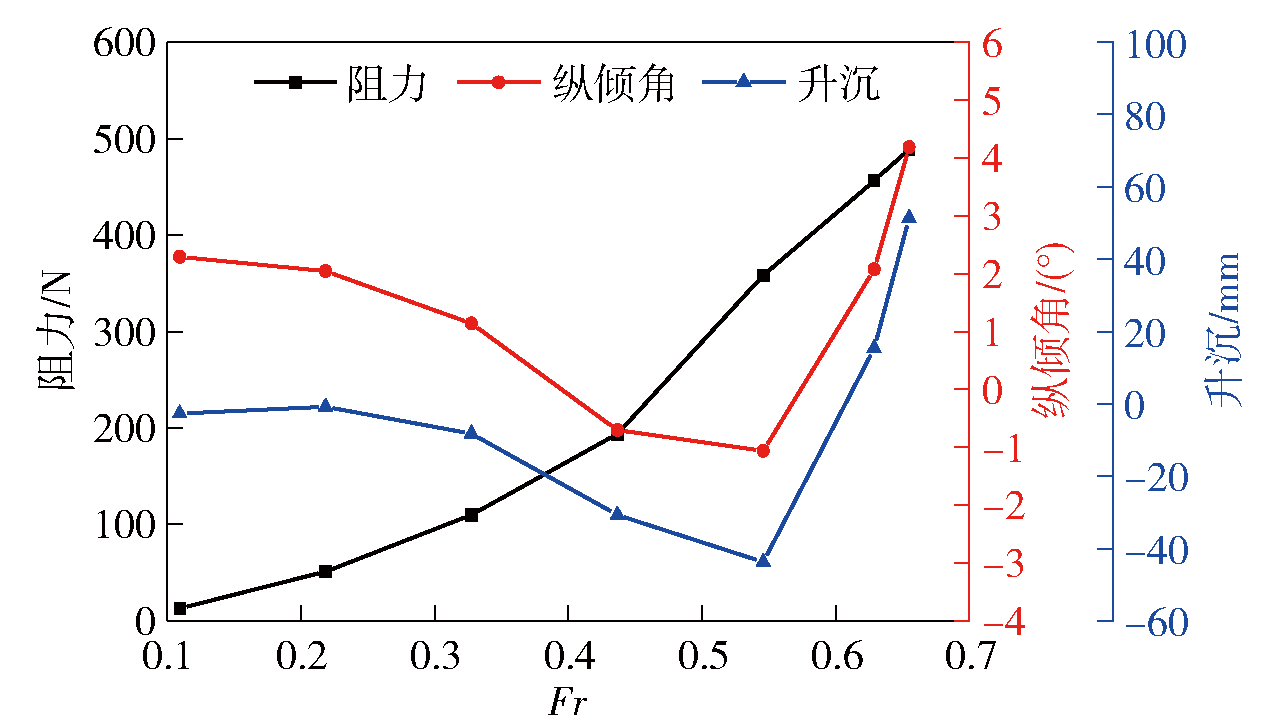
Fig.6 Resistance and attitude parameters of amphibious vehicle under different Froude number
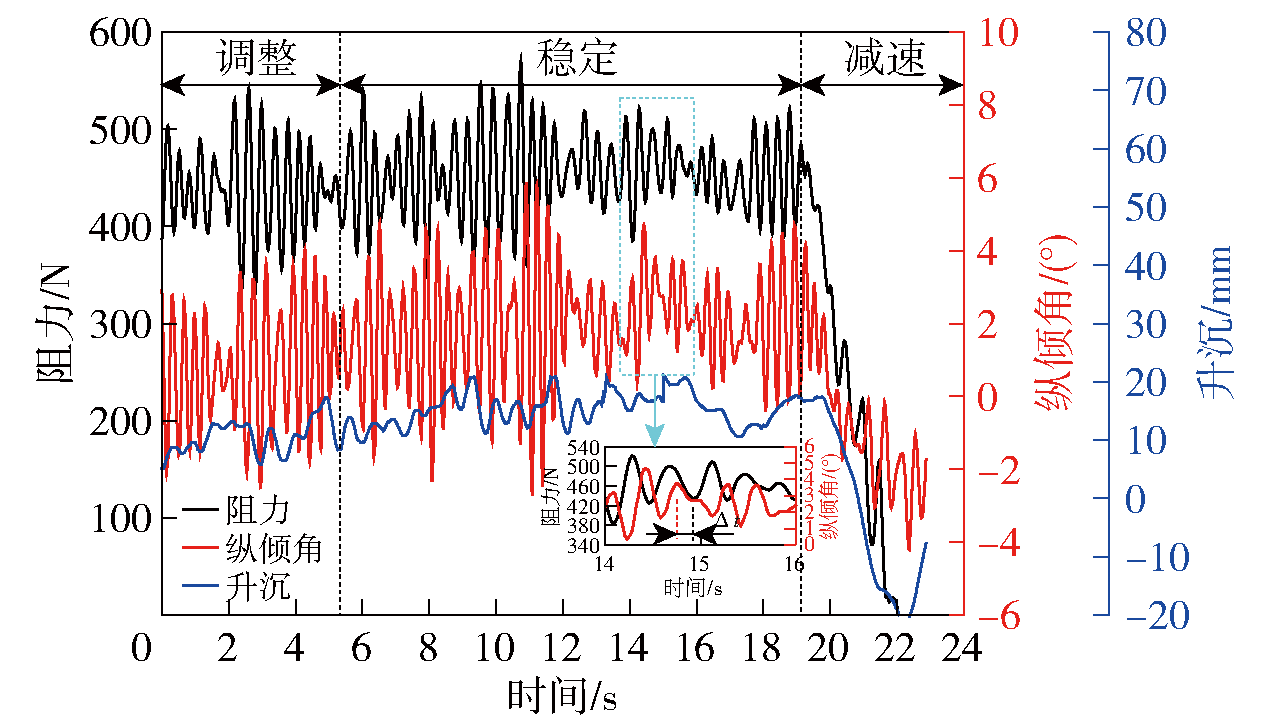
Fig.7 Vehicle resistance and posture for Fr=0.629
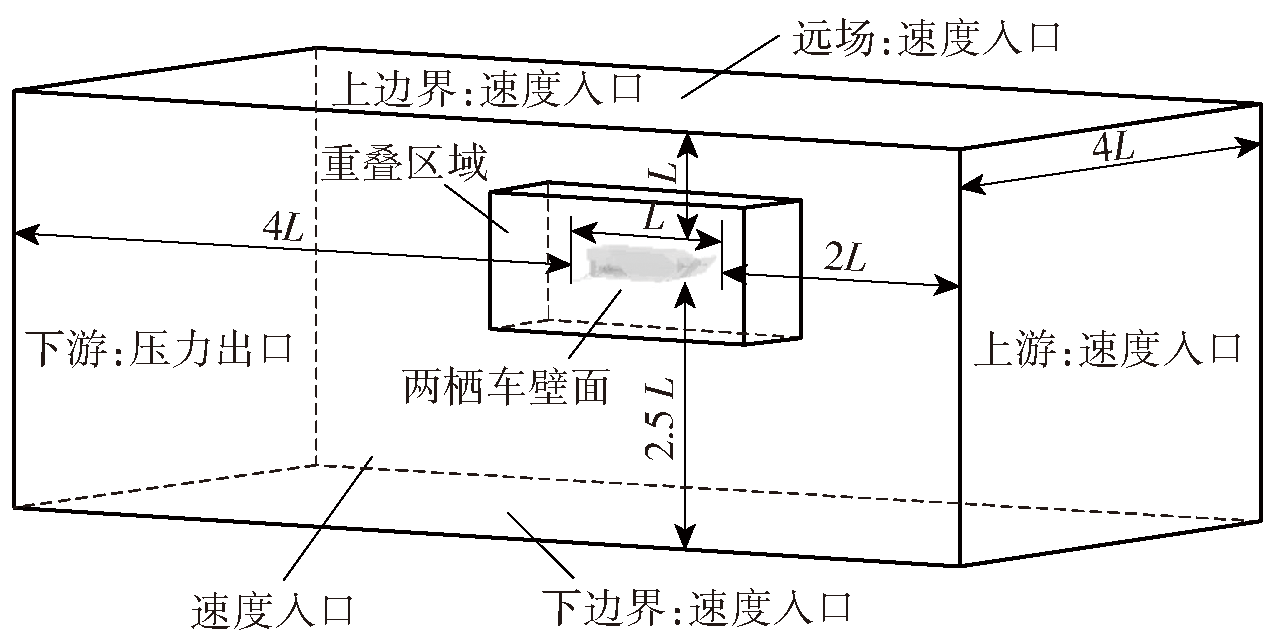
Fig.8 Schematic diagram of computational domain and boundary conditions

Fig.9 Mesh of water-jet inlet duct
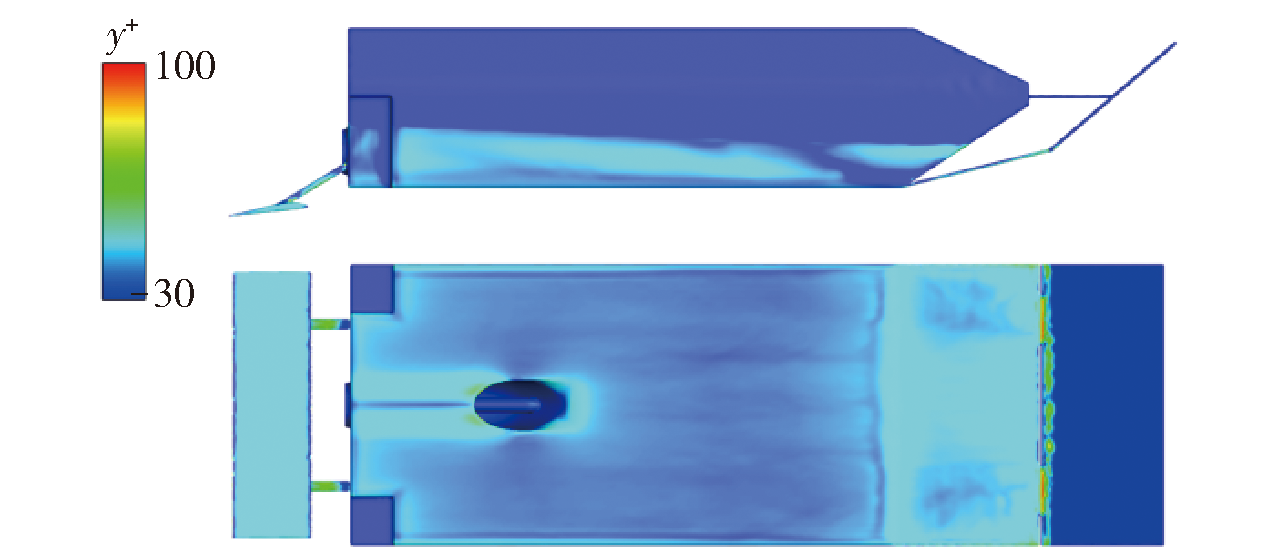
Fig.10 The distribution of y+ on the surface of vehicle
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| G1/104 | 2082 | T1/s | 0.007 |
| G2/104 | 1150 | T2/s | 0.005 |
| G3/104 | 426 | T3/s | 0.0035 |
Table 4 Number of grids and time step size under different accuracies
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| G1/104 | 2082 | T1/s | 0.007 |
| G2/104 | 1150 | T2/s | 0.005 |
| G3/104 | 426 | T3/s | 0.0035 |
| 航行条件 | 网格与时间步 | 参数 | S1 | S2 | S3 | γ | p | USN[S1%] |
|---|---|---|---|---|---|---|---|---|
| 拖曳 | 网格 | Cd | 0.0309 | 0.031 | 0.0316 | 0.167 | 2.585 | 1.786 |
| 时间步 | Cd | 0.0308 | 0.031 | 0.0322 | 0.0167 | 2.585 | 3.584 | |
| 约束自航 | 网格 | H* | 2.166 | 2.157 | 2.146 | 0.8182 | 0.290 | 4.121 |
| Qrel | 0.975 | 0.969 | 0.948 | 0.286 | 1.807 | 3.653 | ||
| 时间步 | H* | 2.172 | 2.157 | 2.137 | 0.75 | 0.415 | 4.345 | |
| Qrel | 0.977 | 0.969 | 0.938 | 0.258 | 1.954 | 4.913 |
Table 5 Grid and time step uncertainty calculation
| 航行条件 | 网格与时间步 | 参数 | S1 | S2 | S3 | γ | p | USN[S1%] |
|---|---|---|---|---|---|---|---|---|
| 拖曳 | 网格 | Cd | 0.0309 | 0.031 | 0.0316 | 0.167 | 2.585 | 1.786 |
| 时间步 | Cd | 0.0308 | 0.031 | 0.0322 | 0.0167 | 2.585 | 3.584 | |
| 约束自航 | 网格 | H* | 2.166 | 2.157 | 2.146 | 0.8182 | 0.290 | 4.121 |
| Qrel | 0.975 | 0.969 | 0.948 | 0.286 | 1.807 | 3.653 | ||
| 时间步 | H* | 2.172 | 2.157 | 2.137 | 0.75 | 0.415 | 4.345 | |
| Qrel | 0.977 | 0.969 | 0.938 | 0.258 | 1.954 | 4.913 |
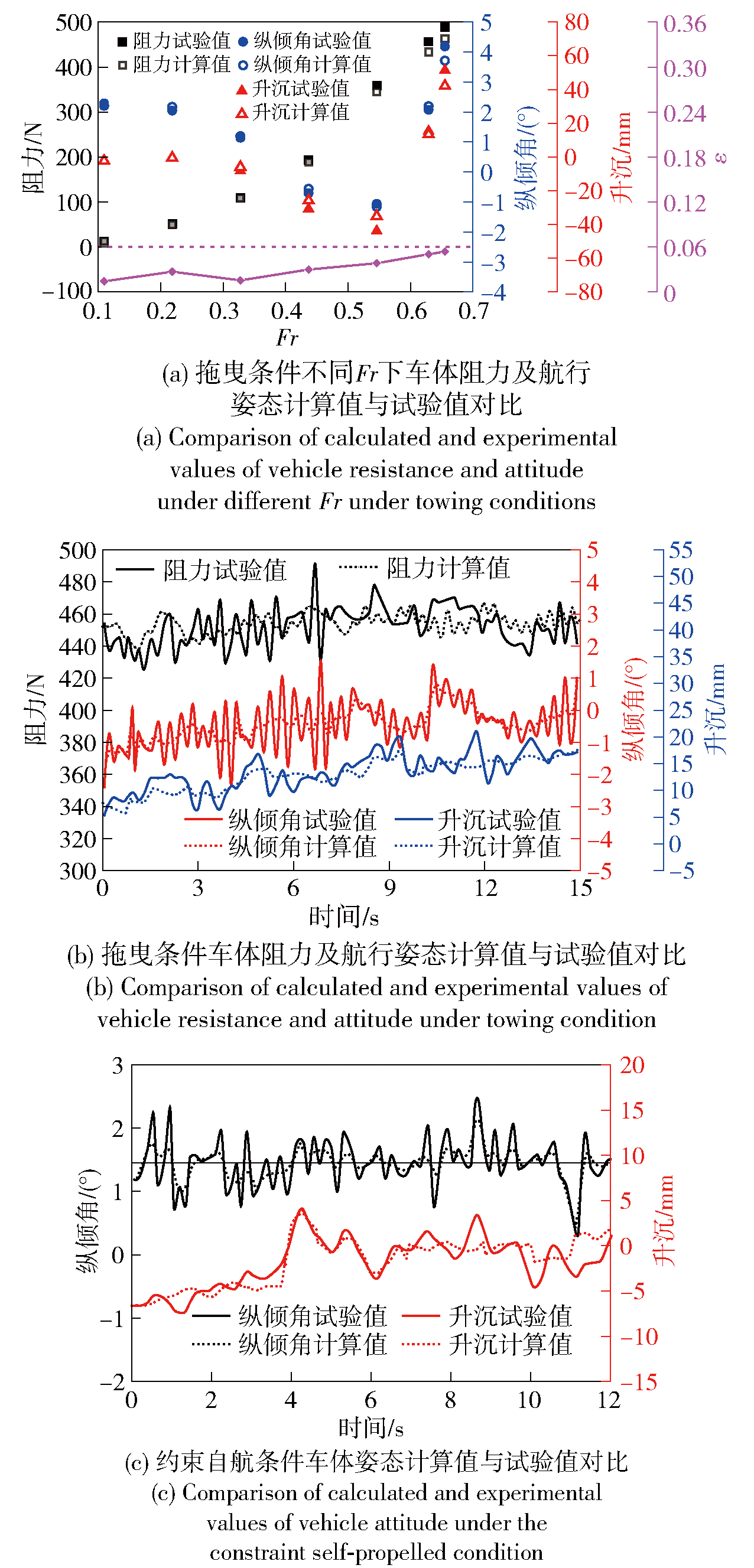
Fig.11 Comparison of calculated and experimental values of vehicle resistance and attitude
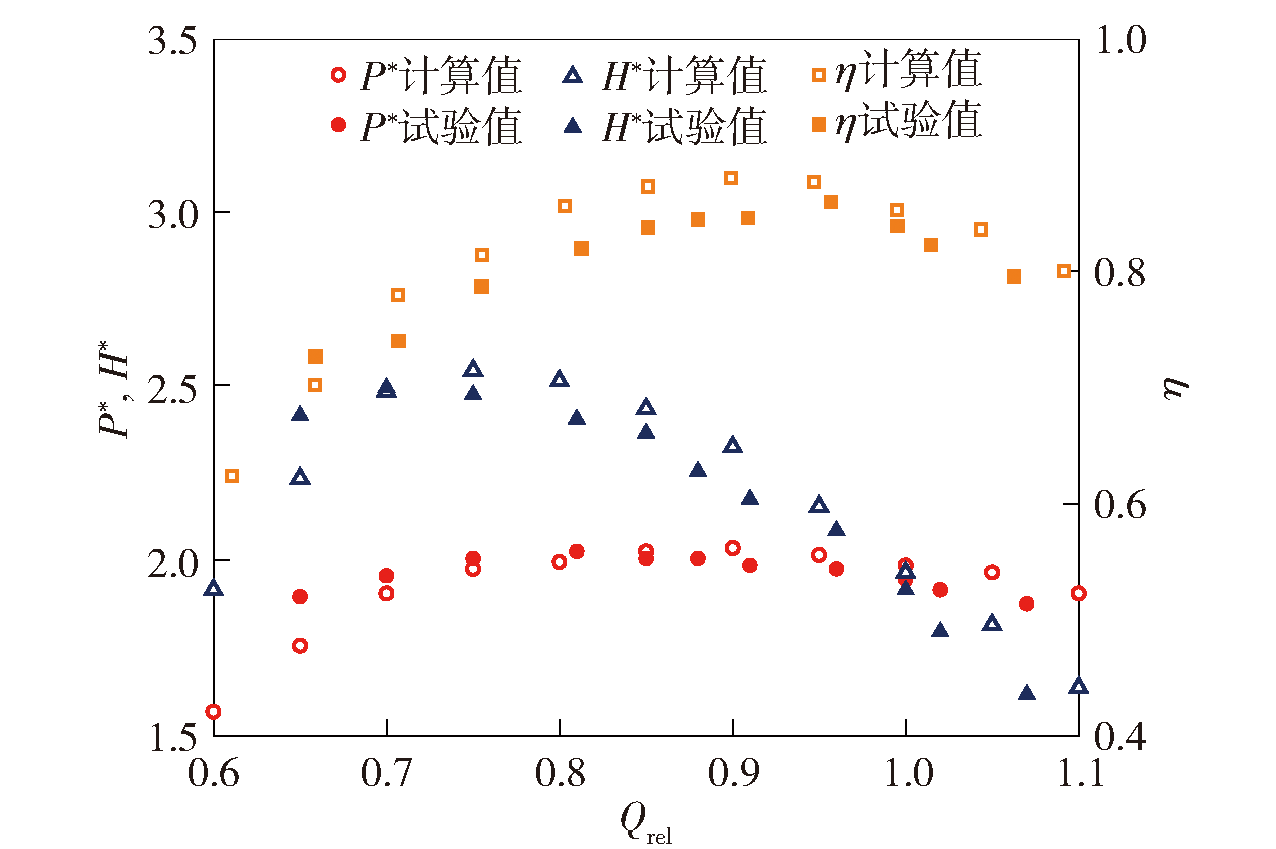
Fig.12 Comparison of numerical and experimental results[31] of characteristics of waterjet propulsor
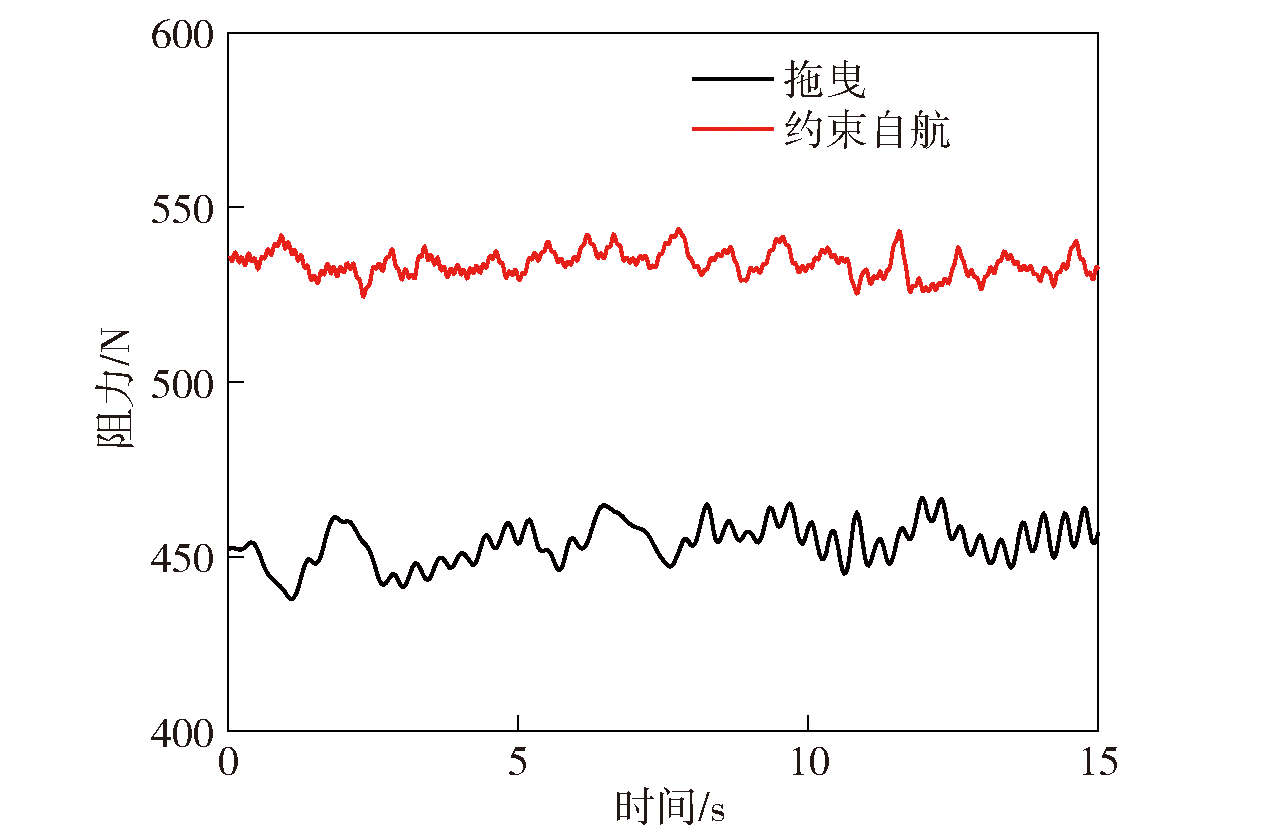
Fig.13 Comparison of resistance of amphibious vehicle under towing and constrained sel-navigation
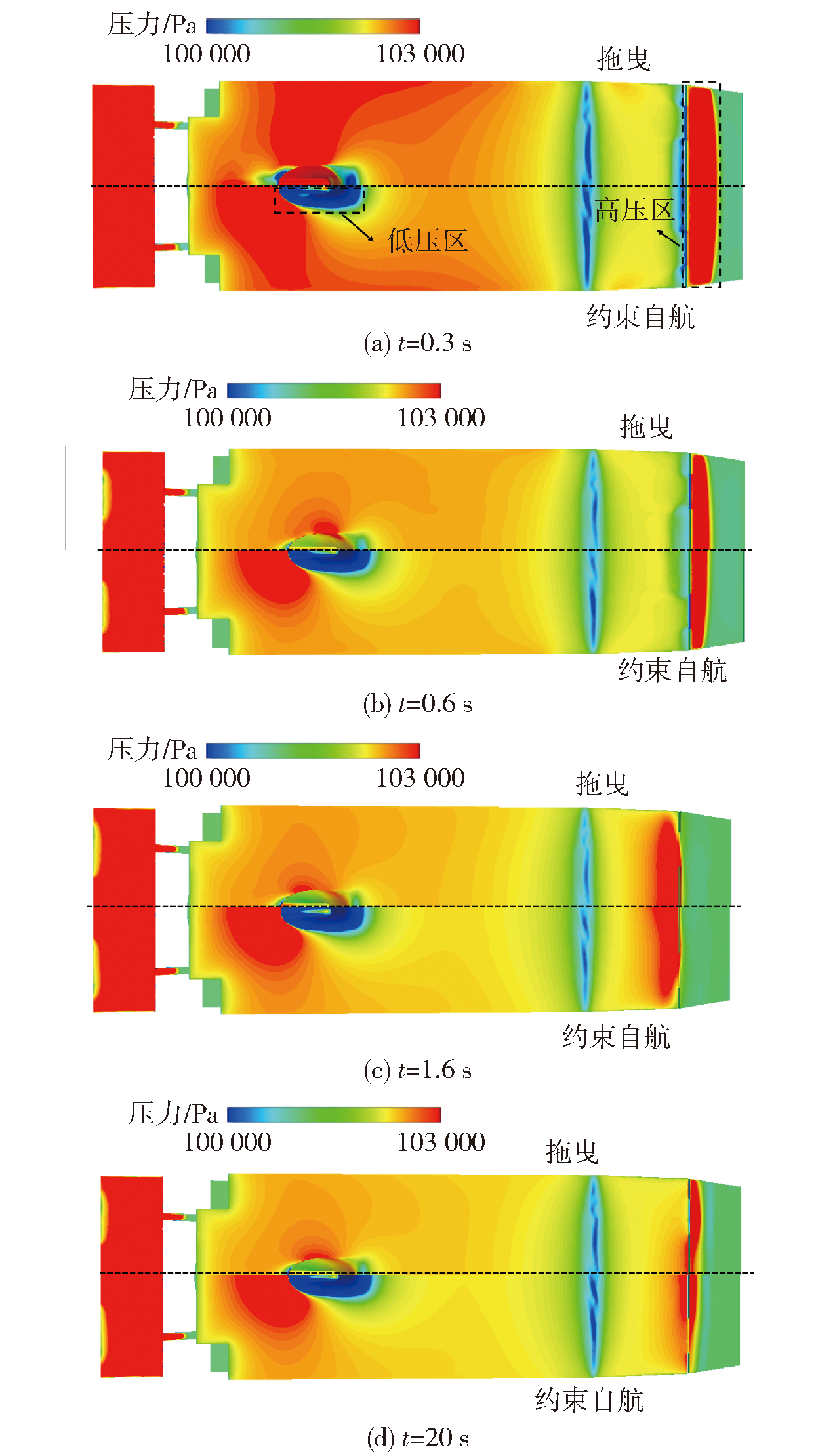
Fig.14 Comparison of vehicle bottom pressure nephograms
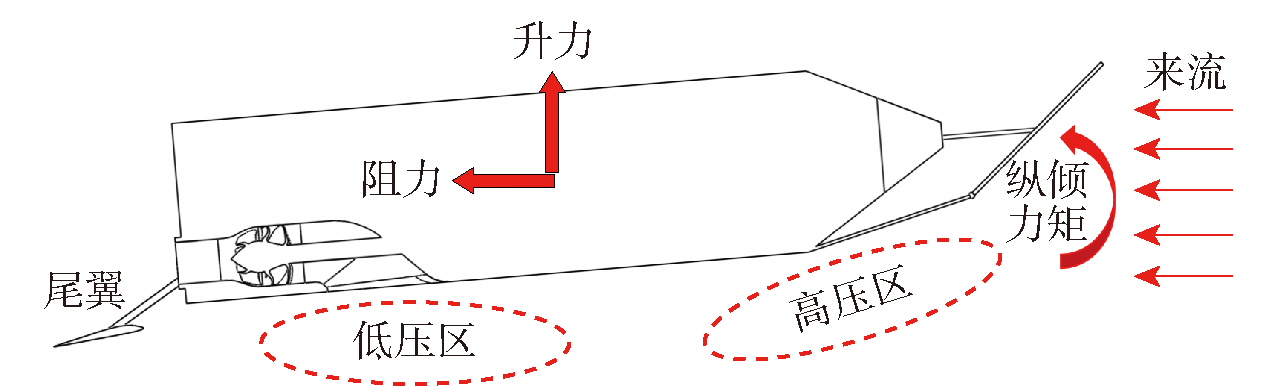
Fig.15 Pressure distribution and force of amphibious vehicle
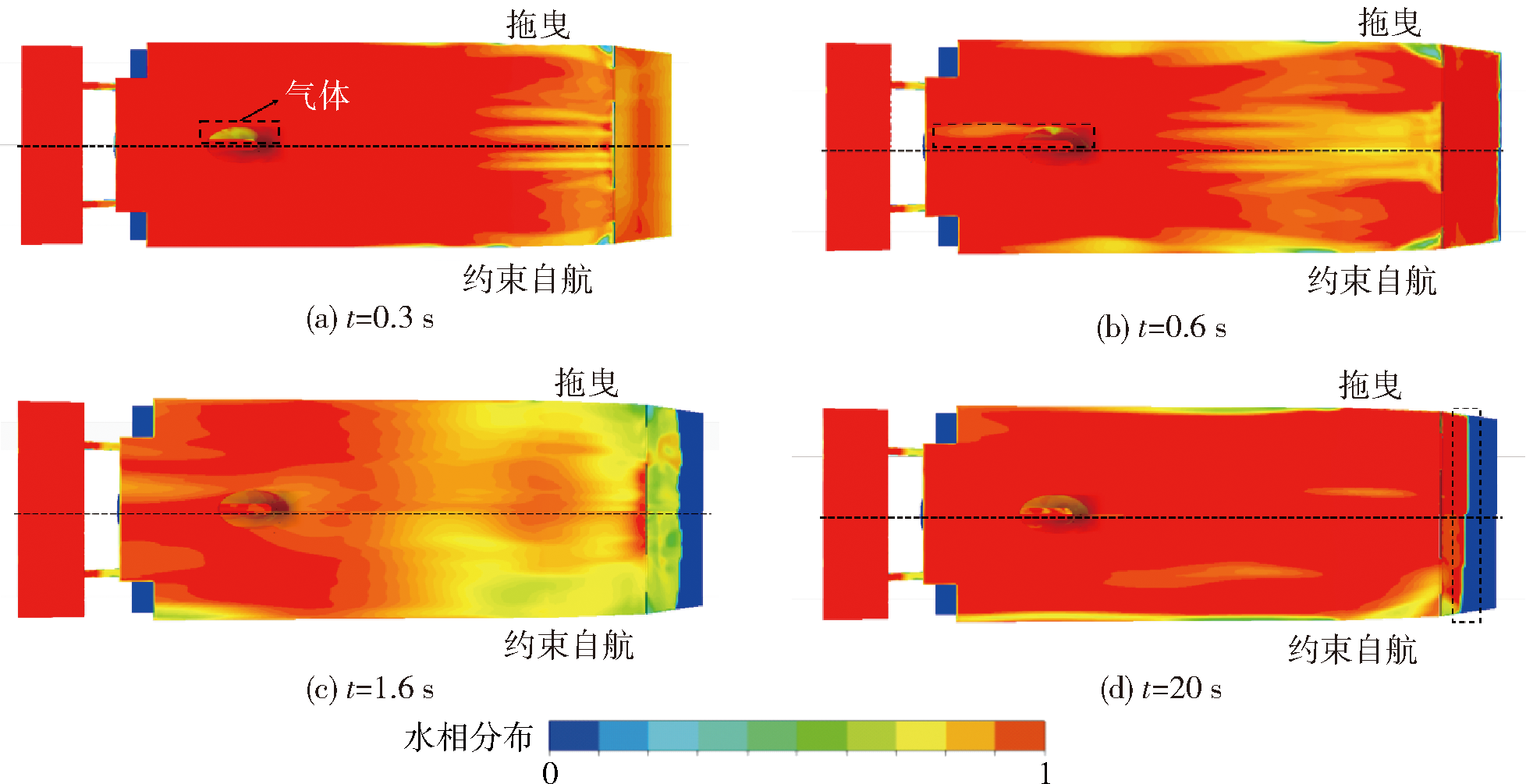
Fig.16 Comparison of water phase distributions of amphibious vehicle bottom

Fig.17 Wave-making characteristics under towed and constrained self-propelled conditions
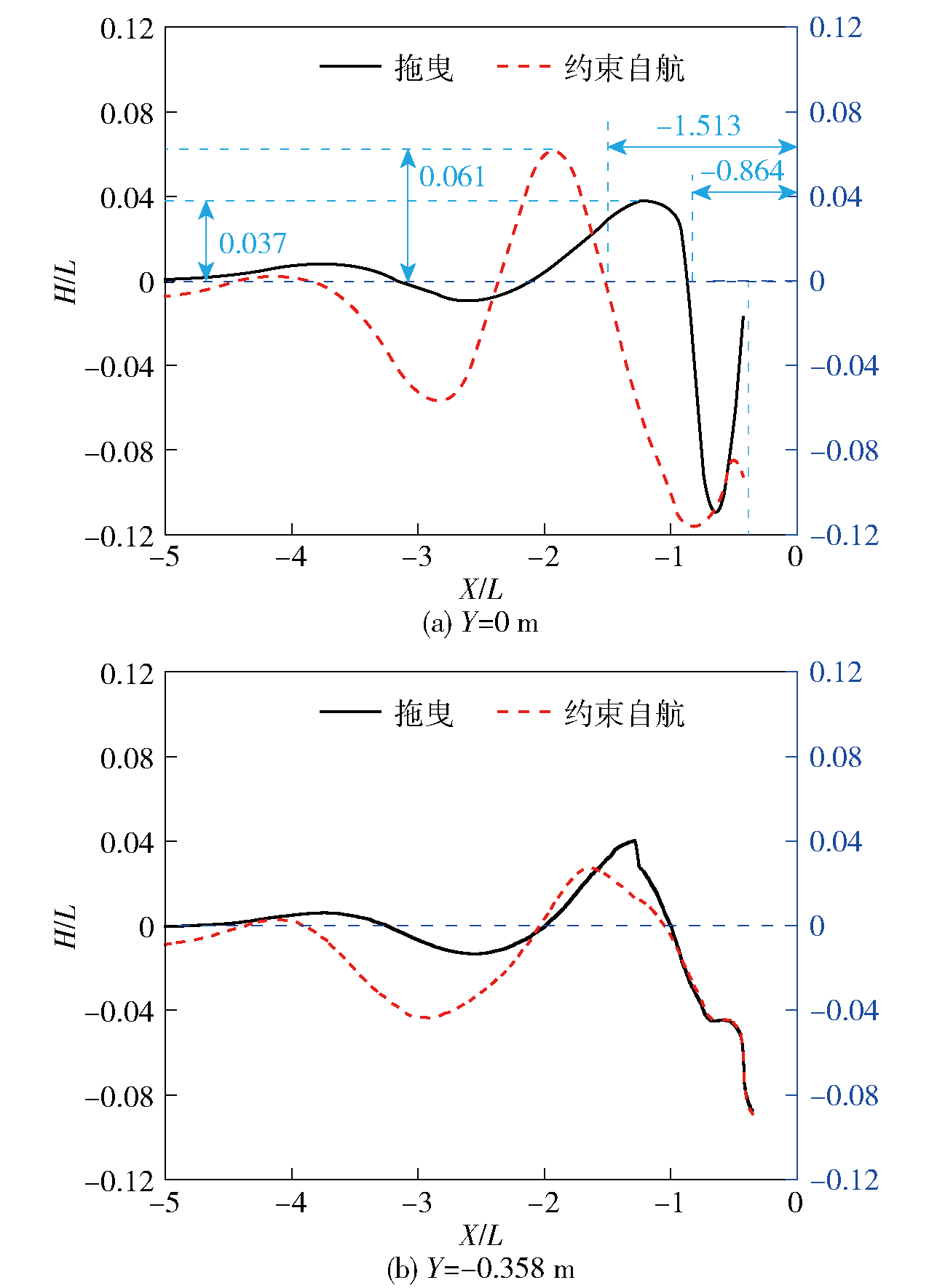
Fig.18 Comparison of wave heights of different longitudinal sections
| [1] |
|
| [2] |
|
| [3] |
彭锟. 基于代理模型的两栖车辆外形减阻优化方法研究[D]. 北京: 北京理工大学, 2015.
|
|
|
|
| [4] |
杨楚泉. 水陆两栖车辆原理与设计[M]. 北京: 国防工业出版社, 2003.
|
|
|
|
| [5] |
王野, 陈慧岩, 汪泰霖, 等. 矢量喷水推进两栖车航行姿态的数值及试验分析[J]. 兵工学报, 2022, 43(12): 3172-3185.
|
|
|
|
| [6] |
刘淑艳, 陈长秋, 闫为革, 等. 改进设计的两栖车辆水上性能试验研究[J]. 北京理工大学学报, 2003, 23(1): 34-37, 41.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
孙承亮, 徐小军, 唐源江, 等. 分段履带式水陆两栖车减阻增速试验及数值仿真[J]. 国防科技大学学报, 2022, 44(5): 201-208.
|
|
|
|
| [12] |
剧冬梅, 项昌乐, 周鹏飞, 等. 纵倾角对轻型轮式两栖车辆的阻力特性影响研究[J]. 兵工学报, 2015, 36(1): 19-26.
doi: 10.3969/j.issn.1000-1093.2015.01.003 |
|
|
|
| [13] |
赵彬, 张敏弟, 剧冬梅. 基于动网格的两栖车航行姿态数值模拟[J]. 兵工学报, 2015, 36(3): 412-420.
doi: 10.3969/j.issn.1000-1093.2015.03.005 |
|
doi: 10.3969/j.issn.1000-1093.2015.03.005 |
|
| [14] |
王少新, 王涵, 金国庆, 等. 水陆两栖车水动力性能与防浪板受力特性研究[J]. 兵器装备工程学报, 2020, 41(1): 1-6.
|
|
|
|
| [15] |
周利兰, 张乐乐. 两栖车航行阻力特性的数值研究[J]. 华南理工大学学报: 自然科学版, 2021, 49(12): 133-142.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
仝博, 王永生, 杨琼方, 等. 喷水推进高速三体滑行艇数值自航研究[J]. 船舶力学, 2018, 22(7): 789-796.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
宗鸿运. 船舶横摇阻尼及运动响应降阶预报方法研究[D]. 大连: 大连理工大学, 2021.
|
|
|
|
| [24] |
|
| [25] |
|
| [26] |
王涛, 徐国英, 郭齐胜. 两栖车辆水上动态性能数值模拟方法及其应用[M]. 北京: 国防工业出版社, 2009.
|
|
|
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
International Towing Tank Conference.Uncertainty analysis in CFD, verification and validation methodology and procedures[C]//Proceeding of the 28th International Towing Tank Conference. Wuxi, China: International Towing Tank Conference, 2017.
|
| [31] |
|
| [1] | GUO Junting, YU Yonggang. Complex Flow Field Characteristics inside Combustion Chamber During the Secondary Ignition Process of CTA [J]. Acta Armamentarii, 2024, 45(7): 2282-2293. |
| [2] | CHEN Tairan, GENG Hao, WANG Dian, QIU Sicong, SUN Xuguang. Research on the Real-time Simulation System for Hydrodynamic Characteristics of Amphibious Vehicle [J]. Acta Armamentarii, 2024, 45(5): 1402-1415. |
| [3] | YAN Zechen, YUE Songlin, QIU Yanyu, WANG Jianping, ZHAO Yuetang, SHI Jie, LI Xu. Improvement on the Calculation Method for Reflected Pressure of Shock Wave in Underwater Explosion [J]. Acta Armamentarii, 2024, 45(4): 1196-1207. |
| [4] | LI Jing, SUN Xiaoxia, MA Xinglong, ZHU Wenxiang. Heat Transfer and Flow Characteristics of Open-cell Metal Foams [J]. Acta Armamentarii, 2024, 45(1): 122-130. |
| [5] | LEI Juanmian, GAO Yi, YONG Zheng. Numerical Investigation of the Jet Interference Characteristics of a Lateral-jet-controlled Spinning Missile [J]. Acta Armamentarii, 2024, 45(1): 105-121. |
| [6] | WANG Xinyu, JIANG Chunlan, WANG Zaicheng, FANG Yuande. Research on the Pressure Relief Structure of JEO Shaped Charge Warhead during Cook-off [J]. Acta Armamentarii, 2024, 45(1): 1-14. |
| [7] | LEI Te, WU Yuwen, XU Gao, QIU Yanming, KANG Chaohui, WENG Chunsheng. Study on Three-dimensional Rotating Detonation Flow Field Structures Based on Large Eddy Simulation [J]. Acta Armamentarii, 2024, 45(1): 85-96. |
| [8] | ZHOU Guangpan, WANG Rong, WANG Mingyang, DING Jianguo, ZHANG Guokai. Experiment and Numerical Simulation of Explosion Resistance Performance of Main Girder of Self-anchored Suspension Bridge Coated with Polyurea [J]. Acta Armamentarii, 2023, 44(S1): 9-25. |
| [9] | KOU Yongfeng, YANG Kun, ZHANG Bin, XIAO Yiwen, LU Jianying, CHEN Lang. Research on Thermal Safety of Warhead Charge Based on Cook-off Experimental and Numerical Simulation [J]. Acta Armamentarii, 2023, 44(S1): 41-49. |
| [10] | YU Shuangyang, PENG Yong. Numerical Simulation of Temperature Rise of 4340 Steel Projectile Penetrating into 45# Steel Target [J]. Acta Armamentarii, 2023, 44(S1): 144-151. |
| [11] | YU Wenjun, CHEN Shengyun, DENG Shuxin, YU Bingbing, JIN Dongyan. Numerical Simulation of the Propagation Law of Explosion Shock Wave in Turning Tunnel [J]. Acta Armamentarii, 2023, 44(S1): 180-188. |
| [12] | DU Yonggang, WANG Xuesong, WAN Zhihua. Study of Screw Drive Failure Mechanisms in a Flight Aid Carrier [J]. Acta Armamentarii, 2023, 44(7): 2033-2040. |
| [13] | GAO Tiesuo, JIANG Tao, FU Yang’aoxiao, DING Mingsong, LIU Qingzong, DONG Weizhong, XU Yong, LI Peng. Plasma Distribution and Its Effect on Electromagnetic Wave Transmission across Vehicles of Varying Sizes [J]. Acta Armamentarii, 2023, 44(6): 1809-1819. |
| [14] | LIU Weizhao, LI Rong, NIU Lanjie, SHI Kunlin. Research Status and Prospect of Hard-Target Penetration Initiation Control Technology [J]. Acta Armamentarii, 2023, 44(6): 1602-1619. |
| [15] | ZOU Guangping, WU Songyang, XU Shubo, CHANG Zhongliang, WANG Xuan. Dynamic Compressive Properties of Graphene/Ceramic Particle Reinforced Polyurethane-Based Composites [J]. Acta Armamentarii, 2023, 44(3): 728-735. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||