
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (S2): 9-16.doi: 10.12382/bgxb.2024.0866
Previous Articles Next Articles
GAO Zhifa1, ZHOU Yu1,*( ), YANG Hang1, LAN Qing1, LI Yuzhe1, GAO Hui1, ZHANG Zhenhua2,**()
), YANG Hang1, LAN Qing1, LI Yuzhe1, GAO Hui1, ZHANG Zhenhua2,**()
Received:2024-09-20
Online:2024-12-12
Contact:
ZHOU Yu, ZHANG Zhenhua
GAO Zhifa, ZHOU Yu, YANG Hang, LAN Qing, LI Yuzhe, GAO Hui, ZHANG Zhenhua. Research Status and Prospect of Multi-domain Cluster Distributed Intelligent Cooperative Autonomous Control Technology[J]. Acta Armamentarii, 2024, 45(S2): 9-16.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Multi-domain cluster distributed warfare concept

Fig.2 Composition of distributed intelligent cooperative autonomous control of multi-domain cluster
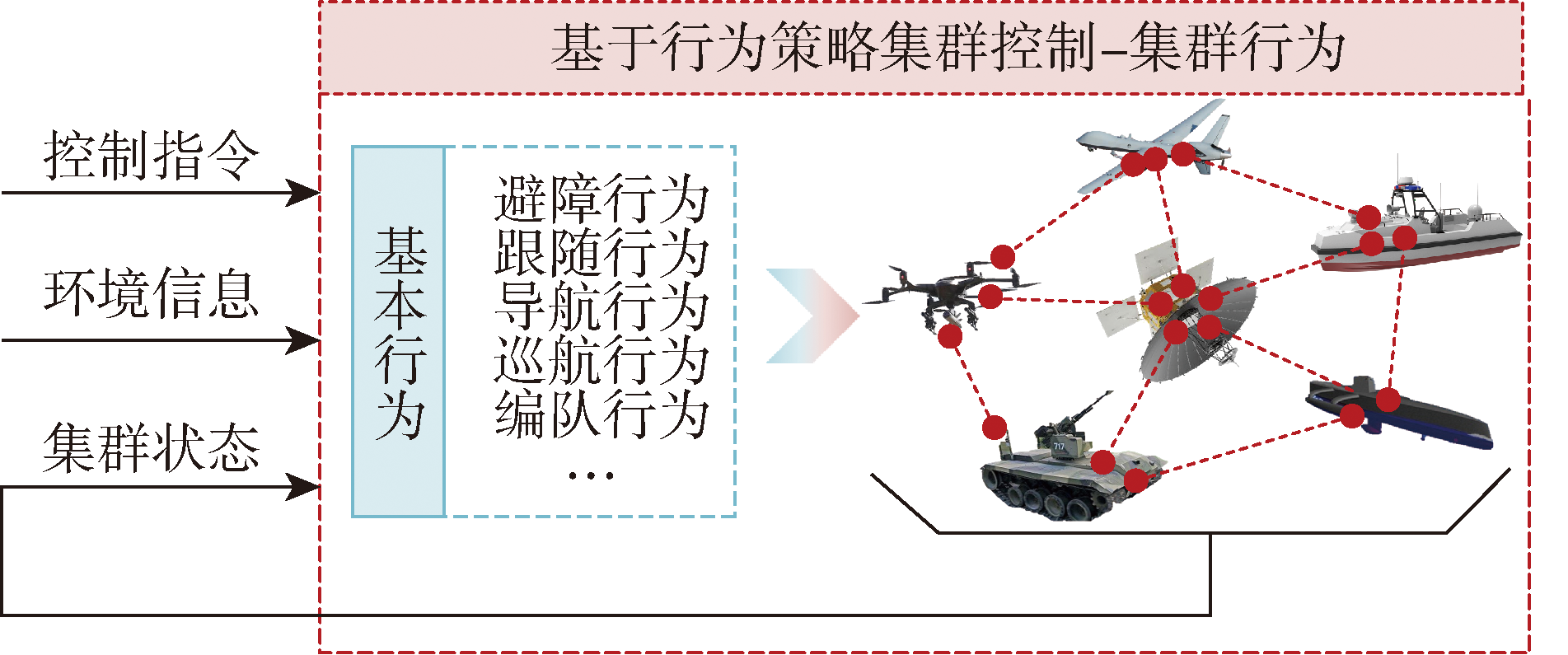
Fig.3 Cluster control based on behavior policy

Fig.4 Cluster control based on virtual structure strategy

Fig.5 Cluster control based on leader-follower strategy
| [1] |
江碧涛, 温广辉, 周佳玲, 等. 智能无人集群系统跨域协同技术研究现状与展望[J]. 中国工程科学, 2024, 26(1):117-126.
doi: 10.15302/J-SSCAE-2024.01.015 |
|
|
|
| [2] |
郭兴, 李擎, 姚其家, 等. 异构无人系统协同控制研究进展[J/OL]. 工程科学学报, 2024(2024-01-12)[2024-09-15].https://doi.org/10.13374/j.issn2095-9389.2024.01.12.001.
|
|
|
|
| [3] |
逯杰. 跨域联合,未来联合作战新趋势[N]. 解放军报, 2020-09-08(07)[2024-09-15].
|
|
|
|
| [4] |
|
| [5] |
李龙跃, 贾忠慧, 皮雳, 等. 美军杀伤网的概念内涵、发展现状与趋势[J/OL]. 航空兵器, 2024 (2024-08-15)[2024-09-15]. http://kns.cnki.net/kcms/detail/41.1228.TJ.20240815.1604.004.html.
|
|
|
|
| [6] |
李磊, 王彤, 蒋琪. 从美军2042年无人系统路线图看无人系统关键技术发展动向[J]. 无人系统技术, 2018, 1(4):79-84.
|
|
|
|
| [7] |
何玉庆, 秦天一, 王楠. 跨域协同:无人系统技术发展和应用新趋势[J]. 无人系统技术, 2021, 4(4):13.
|
|
|
|
| [8] |
李姝, 裘昌利, 栾爽, 等. 美军无人系统发展规划研究综述[J]. 无人系统技术, 2023, 6(6):101-108.
|
|
|
|
| [9] |
杨巍, 秦浩, 王佳, 等. 2021年世界军用无人系统领域发展综述[J]. 中国电子科学研究院学报, 2022, 17(4):368-373.
|
|
|
|
| [10] |
张宝珍, 吴建龙. 美空军三位一体“试验旗”系列演习综述[J]. 计算机测量与控制, 2021, 29(12):1-7,12.
|
|
|
|
| [11] |
粟锋, 徐能武. 美国国防太空力量发展的动向及应对—基于对美国2020年《国防太空战略》的解读[J]. 国防科技, 2021, 42(3):91-97.
|
|
|
|
| [12] |
太阳谷. 美军联合全域作战探索路线浅析[J]. 军事文摘, 2020 (23):32-34.
|
|
|
|
| [13] |
褚睿, 刘玮琦. “多域作战”的外军视角[N]. 解放军报, 2021-7-29(7)[2024-9-15].
|
|
|
|
| [14] |
European Defence Agency. Beyond 2040 - EDA analysis warns on future warfare trends and technology imperatives for European defence[EB/OL].(date-in-citation content-type="updated">2023-10-23)[2024-9-5]. https://defence-industry.eu/eda-enhancing-eu-military-capabilities-beyond-2040/.
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
张鹏飞, 何印, 马振华, 等. 无人机集群协同控制技术综述[J]. 兵器装备工程学报, 2024, 45(4):1-9.
|
|
|
|
| [19] |
贾永楠, 李擎. 多机器人编队控制研究进展[J]. 工程科学学报, 2018, 40(8):893-900.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
刘惟恒, 郑辛, 邓志红. 基于邻近行为观测方法的多无人机分布式自适应编队控制[J]. 中南大学学报, 2021, 3:784-795.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
卫恒, 吕强, 刘扬, 等. 基于状态切换的分布式多机器人编队控制[J]. 兵工学报, 2019, 40(5):1103-1112.
doi: 10.3969/j.issn.1000-1093.2019.05.024 |
|
doi: 10.3969/j.issn.1000-1093.2019.05.024 |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
|
| [59] |
|
| [60] |
梁鸿涛, 王耀南, 华和安, 等. 无人集群系统深度强化学习控制研究进展[J]. 工程科学学报, 2024, 46(9):1521-1534.
|
|
|
|
| [61] |
|
| [1] | SU Zhibao, XIANG Shen, YU Xuewei, AN Xuyang. A Simulation System for Cooperative Control of Autonomous Convoy [J]. Acta Armamentarii, 2023, 44(S2): 35-43. |
| [2] | ZHANG Cong, LIU Shuang, JIANG Siyuan, LIU Shiji. Driving Leveling Control Method with Multi-Actuator Cooperation for Special Vehicles [J]. Acta Armamentarii, 2023, 44(1): 98-107. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||