
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (8): 2698-2711.doi: 10.12382/bgxb.2023.0590
Previous Articles Next Articles
PANG Hui*( ), WANG Mingxiang, WANG Lei, ZHENG Lizhe
), WANG Mingxiang, WANG Lei, ZHENG Lizhe
Received:2023-06-19
Online:2023-10-19
Contact:
PANG Hui
CLC Number:
PANG Hui, WANG Mingxiang, WANG Lei, ZHENG Lizhe. Design of Event Trigger-based Vibration Control for Active Suspension System[J]. Acta Armamentarii, 2024, 45(8): 2698-2711.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Active suspension system dynamic model
| 参数 | 数值 |
|---|---|
| ms/kg | 492 |
| mu/kg | 40 |
| ks/(N·m-1) | 46021 |
| kt/(N·m-1) | 238145 |
| c/(N·s·m-1) | 2040 |
Table 1 Parameter values of active suspension model
| 参数 | 数值 |
|---|---|
| ms/kg | 492 |
| mu/kg | 40 |
| ks/(N·m-1) | 46021 |
| kt/(N·m-1) | 238145 |
| c/(N·s·m-1) | 2040 |

Fig.2 Input dead zone and saturation characteristics
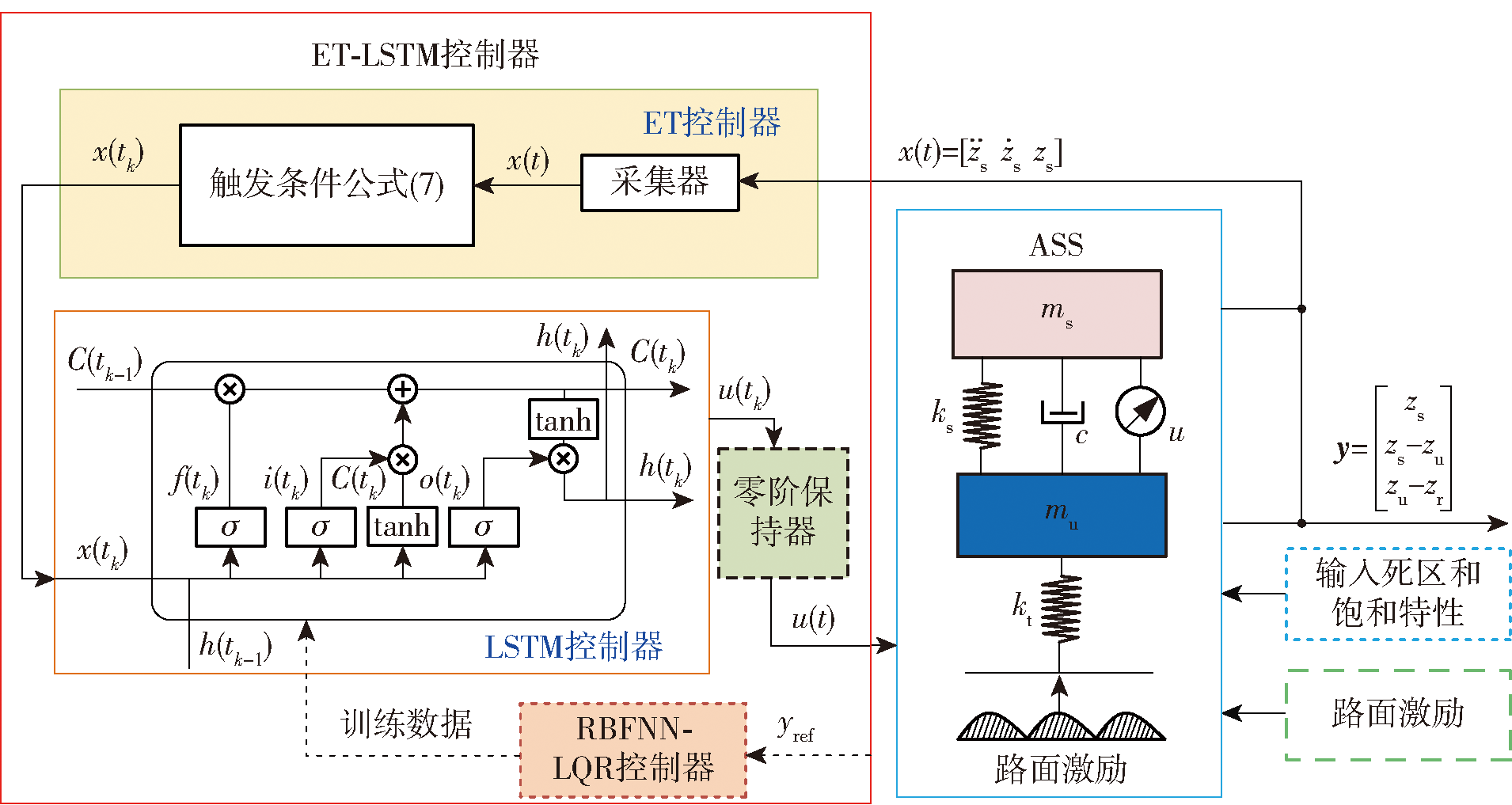
Fig.3 Suspension system control scheme

Fig.4 LSTM neural network structure

Fig.5 The structure of RBFNN

Fig.6 Construction process of LSTM controller

Fig.7 Comparison of predicted results
| 符号 | 数值 | 符号 | 数值 |
|---|---|---|---|
| q1 | 7.792×104 | nin, nim,nout | 3,5,1 |
| q2 | 9.1831×104 | Igc | 0.05 |
| q3 | 9.6057×104 | nlstm, nFcln | 200,50 |
| rlBP | 0.2 | rlLSTM | 0.01 |
| Nmax | 200 | Ggt | 1 |
| Nmin | 20 | rAR | 0.5 |
Table 2 Parameter values of active suspension model
| 符号 | 数值 | 符号 | 数值 |
|---|---|---|---|
| q1 | 7.792×104 | nin, nim,nout | 3,5,1 |
| q2 | 9.1831×104 | Igc | 0.05 |
| q3 | 9.6057×104 | nlstm, nFcln | 200,50 |
| rlBP | 0.2 | rlLSTM | 0.01 |
| Nmax | 200 | Ggt | 1 |
| Nmin | 20 | rAR | 0.5 |

Fig.8 Response curves of suspension system on bump road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.3827 | 0.002340 | 243.9 |
| ET-BPNN | 0.3637 | 0.001871 | 225.6 |
| ET-LSTM | 0.3060 | 0.001821 | 207.3 |
Table 3 Comparison of RMSs of active suspension performance on bump road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.3827 | 0.002340 | 243.9 |
| ET-BPNN | 0.3637 | 0.001871 | 225.6 |
| ET-LSTM | 0.3060 | 0.001821 | 207.3 |

Fig.9 The output of controller

Fig.10 Release instants of ET controller

Fig.11 Response curves of suspension system on random road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.938 | 0.01092 | 567.1 |
| ET-BPNN | 0.791 | 0.008958 | 399.1 |
| ET-LSTM | 0.494 | 0.008127 | 263.7 |
Table 4 Comparison of RMSs of active suspension performance on random road
| 控制器 | RMS | yuRMS | F RMS |
|---|---|---|---|
| Passive | 0.938 | 0.01092 | 567.1 |
| ET-BPNN | 0.791 | 0.008958 | 399.1 |
| ET-LSTM | 0.494 | 0.008127 | 263.7 |

Fig.12 The output of controller

Fig.13 Release instants of ET controller

Fig.14 Response curves of suspension system on random road at a speed of 5m/s

Fig.15 Response curves of suspension system on random road at a speed of 10m/s

Fig.16 Response curves of suspension system on random road at a speed of 15m/s
| 车速/ (m·s-1) | 控制 算法 | RMS( ) | RMS (yu) | RMS (F) |
|---|---|---|---|---|
| Passive | 0.469 | 0.005458 | 233.5 | |
| 5 | ET-BPNN | 0.4354 (↓7.16%) | 0.004479 (↓17.9%) | 220.9 (↓5.4%) |
| ET-LSTM | 0.3955 (↓15.67%) | 0.003478 (↓36.28%) | 199.5 (↓14.56%) | |
| Passive | 0.6633 | 0.007716 | 330.3 | |
| 10 | ET-BPNN | 0.6157 (↓7.17%) | 0.006334 (↓17.9%) | 312.5 (↓5.4%) |
| ET-LSTM | 0.5593 (↓15.68%) | 0.004919 (↓36.25%) | 282.2 (↓14.56%) | |
| Passive | 0.8124 | 0.009453 | 402.5 | |
| 15 | ET-BPNN | 0.7641 (↓5.9%) | 0.007758 (↓17.93%) | 382.7 (↓4.92%) |
| ET-LSTM | 0.685 (↓15.68%) | 0.006024 (↓36.27%) | 345.6 (↓14.14%) |
Table 5 Comparison of RMSs of active suspension performance on random road at different speeds
| 车速/ (m·s-1) | 控制 算法 | RMS( ) | RMS (yu) | RMS (F) |
|---|---|---|---|---|
| Passive | 0.469 | 0.005458 | 233.5 | |
| 5 | ET-BPNN | 0.4354 (↓7.16%) | 0.004479 (↓17.9%) | 220.9 (↓5.4%) |
| ET-LSTM | 0.3955 (↓15.67%) | 0.003478 (↓36.28%) | 199.5 (↓14.56%) | |
| Passive | 0.6633 | 0.007716 | 330.3 | |
| 10 | ET-BPNN | 0.6157 (↓7.17%) | 0.006334 (↓17.9%) | 312.5 (↓5.4%) |
| ET-LSTM | 0.5593 (↓15.68%) | 0.004919 (↓36.25%) | 282.2 (↓14.56%) | |
| Passive | 0.8124 | 0.009453 | 402.5 | |
| 15 | ET-BPNN | 0.7641 (↓5.9%) | 0.007758 (↓17.93%) | 382.7 (↓4.92%) |
| ET-LSTM | 0.685 (↓15.68%) | 0.006024 (↓36.27%) | 345.6 (↓14.14%) |
| [1] |
马硕, 李永明, 伊曙东. 汽车主动悬架系统的控制方法综述[J]. 控制工程, 2024, 31(4):695-702.
|
|
|
|
| [2] |
曹青松, 许力, 易星. 轮毂电机驱动的电动汽车主动悬架构型与控制[J]. 机械设计, 2020, 37(10): 85-92.
doi: 10.13841/j.cnki.jxsj.2020.10.012 |
|
|
|
| [3] |
殷珺, 罗建南, 喻凡. 汽车电磁式主动悬架技术综述[J]. 机械设计与研究, 2020, 36(1): 161-168.
|
|
|
|
| [4] |
|
| [5] |
李金辉, 张柯柯, 徐立友. 重型汽车主动悬架次优控制策略设计与分析[J]. 振动与冲击, 2020, 39(13): 141-147.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
李韶华, 张培强, 杨建森. 轮毂电机驱动电动汽车主动悬架T-S变论域模糊控制研究[J]. 振动与冲击, 2022, 41(24): 201-209.
|
|
|
|
| [10] |
张云, 孙劭泽, 金贤建, 等. 轮毂式电机驱动电动汽车主动悬架滑模控制研究[J]. 动力学与控制学报, 2021, 19(3): 89-94.
|
|
|
|
| [11] |
秦武, 朱钢, 上官文斌, 等. 具有扰动观测器的汽车主动悬架滑模控制[J]. 振动工程学报, 2020, 33(1): 158-167.
|
|
|
|
| [12] |
李娜. 基于模糊神经网络的二自由度主动悬架滑模控制系统设计[J]. 计算机测量与控制, 2021, 29(9): 101-104, 120.
|
|
|
|
| [13] |
|
| [14] |
吕科, 杨正才, 赵宝. 递归对角神经网络算法在汽车主动悬架控制系统中的研究[J]. 燕山大学学报, 2017, 41(1): 27-31.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
刘秋, 孙晋伟, 张华, 等. 基于卷积神经网络的路面识别及半主动悬架控制[J]. 兵工学报, 2020, 41(8): 1483-1493.
doi: 10.3969/j.issn.1000-1093.2020.08.002 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.002 |
|
| [18] |
寇发荣, 胡凯仑, 陈若晨, 等. 基于ResNeSt网络路面状态识别的主动悬架模型预测控制[J]. 控制与决策, 2024, 39(6): 1849-1858.
|
|
|
|
| [19] |
梁冠群, 赵通, 王岩, 等. 基于LSTM网络的路面不平度辨识方法[J]. 汽车工程, 2021, 43(4): 509-517, 628.
|
|
|
|
| [20] |
|
| [21] |
范利蓉, 王芳, 周超, 等. 状态时延和全状态约束下的多智能体系统自适应事件触发控制[J]. 控制与决策, 2022, 37(4): 892-902.
|
|
|
|
| [22] |
张栋, 马苏慧, 吕石, 等. 多智能体系统事件触发一致性研究综述[J]. 北京理工大学学报, 2022, 42(10): 1059-1072.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
庞辉, 王延, 刘凡. 考虑参数不确定性的主动悬架H2/H∞保性能控制[J]. 控制与决策, 2019, 34(3): 470-478.
|
|
|
|
| [30] |
|
| [31] |
陈浩浩, 樊渊. 基于动态事件触发机制的线性系统最优控制[J]. 控制工程, 2020, 27(10): 1820-1827.
|
|
|
|
| [32] |
|
| [33] |
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||