
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (8): 2678-2687.doi: 10.12382/bgxb.2023.0599
Previous Articles Next Articles
ZHOU Guohua, LI Linfeng*( ), WU Kena, LIU Yuelin, XIA Shuai
), WU Kena, LIU Yuelin, XIA Shuai
Received:2023-06-21
Online:2023-10-23
Contact:
LI Linfeng
CLC Number:
ZHOU Guohua, LI Linfeng, WU Kena, LIU Yuelin, XIA Shuai. Numerical Simulation of Magnetic Interference Parameter Identification of AUV Based on L-SHADE Agorithm[J]. Acta Armamentarii, 2024, 45(8): 2678-2687.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Schematic diagram of mathematical model
Fig.2 Schematic diagram of attitude transformation
Fig.3 Schematic diagram of hybrid model
Fig.4 Mechanism scheme of linear parameter declination

Fig.5 Schematic diagram of model
| 辨识方法 | K | mp |
|---|---|---|
| 理论计算 | ||
| 模拟仿真 |
Table 1 Parameter identification comparison sheet
| 辨识方法 | K | mp |
|---|---|---|
| 理论计算 | ||
| 模拟仿真 |

Fig.6 Analysis of influence of magnetic sensor measuring accuracy
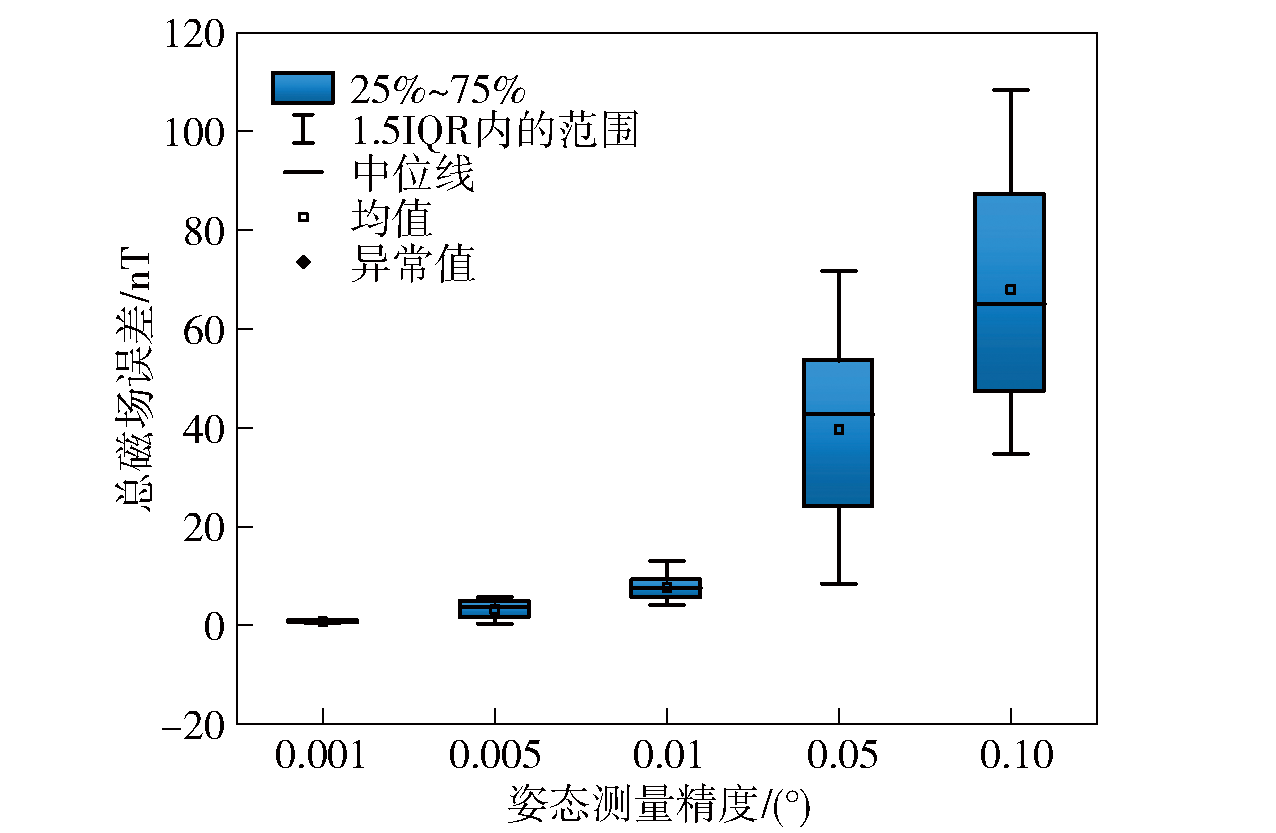
Fig.7 Analysis of influence of attitude measurement accuracy
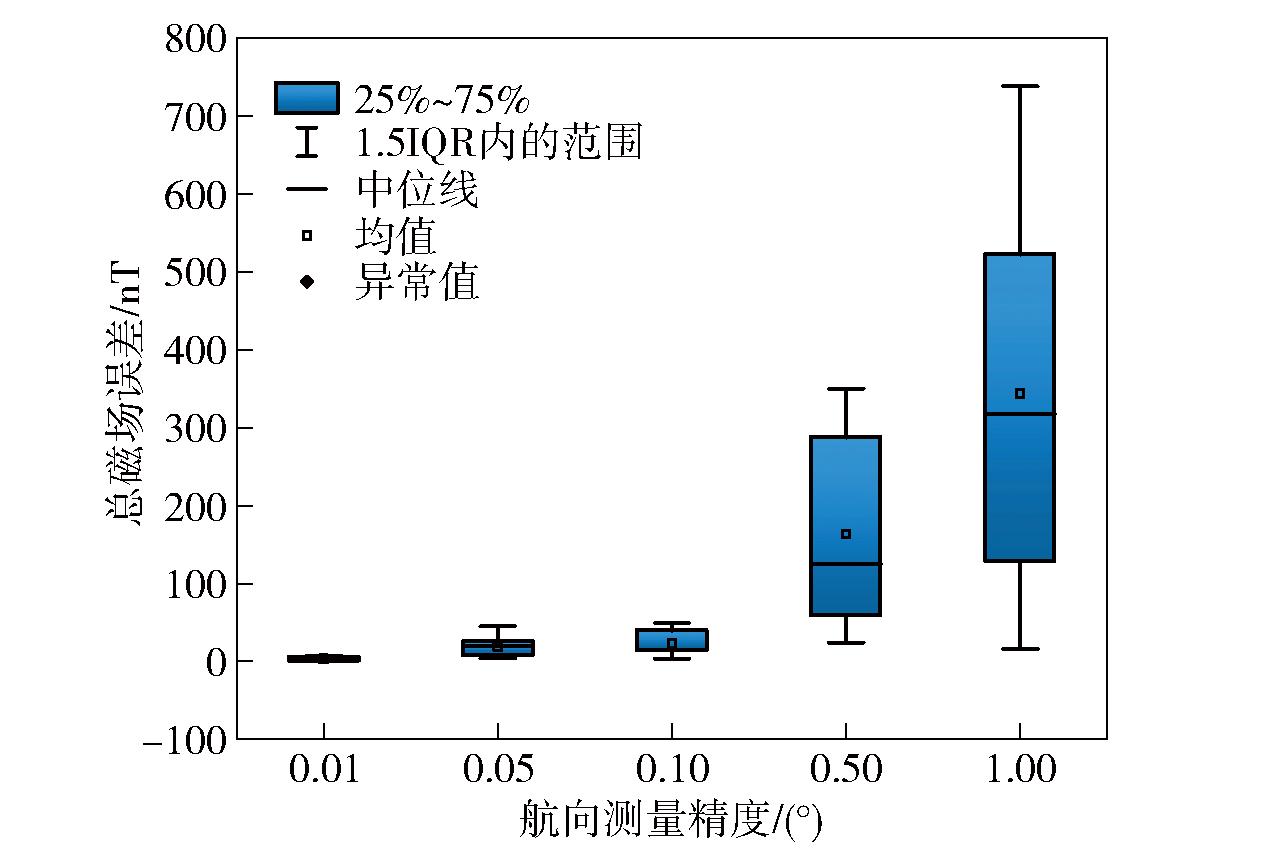
Fig.8 Analysis of influence of heading measurement accuracy
| 序号 | 磁传感器测量 精度/nT | 姿态测量 精度/(°) | 航向测量 精度/(°) |
|---|---|---|---|
| 1 | 100 | 0.1 | 1 |
| 2 | 1 | 0.001 | 1 |
| 3 | 100 | 0.1 | 0.5 |
| 4 | 10 | 0.1 | 0.5 |
| 5 | 1 | 0.1 | 0.5 |
| 6 | 10 | 0.05 | 0.5 |
| 7 | 10 | 0.1 | 0.1 |
| 8 | 10 | 0.05 | 0.1 |
| 9 | 1 | 0.05 | 0.1 |
| 10 | 10 | 0.01 | 0.1 |
| 11 | 1 | 0.01 | 0.1 |
| 12 | 0.1 | 0.005 | 0.05 |
| 13 | 0.01 | 0.001 | 0.01 |
Table 2 13 groups of typical sensor accuracy solutions
| 序号 | 磁传感器测量 精度/nT | 姿态测量 精度/(°) | 航向测量 精度/(°) |
|---|---|---|---|
| 1 | 100 | 0.1 | 1 |
| 2 | 1 | 0.001 | 1 |
| 3 | 100 | 0.1 | 0.5 |
| 4 | 10 | 0.1 | 0.5 |
| 5 | 1 | 0.1 | 0.5 |
| 6 | 10 | 0.05 | 0.5 |
| 7 | 10 | 0.1 | 0.1 |
| 8 | 10 | 0.05 | 0.1 |
| 9 | 1 | 0.05 | 0.1 |
| 10 | 10 | 0.01 | 0.1 |
| 11 | 1 | 0.01 | 0.1 |
| 12 | 0.1 | 0.005 | 0.05 |
| 13 | 0.01 | 0.001 | 0.01 |
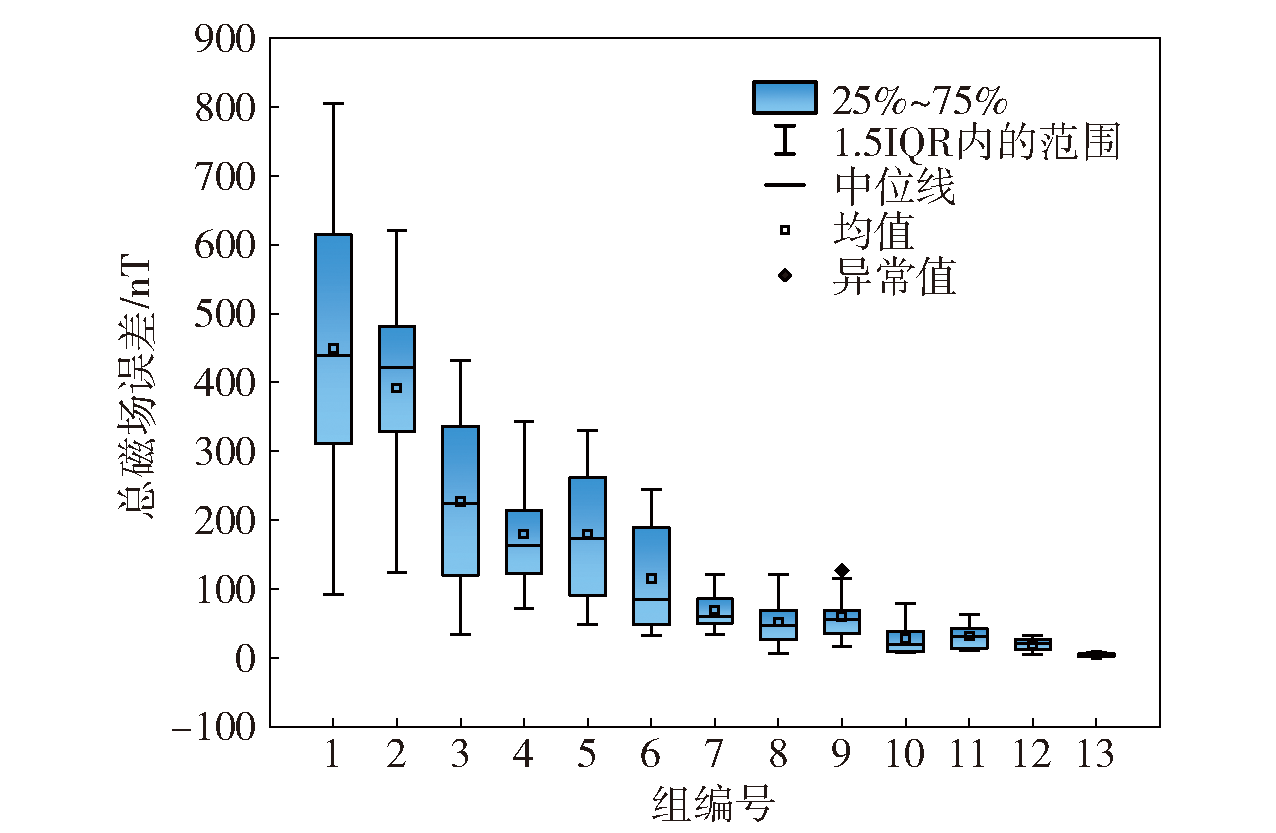
Fig.9 Effect analysis of sensors with different precision

Fig.10 Layout of the experimental site
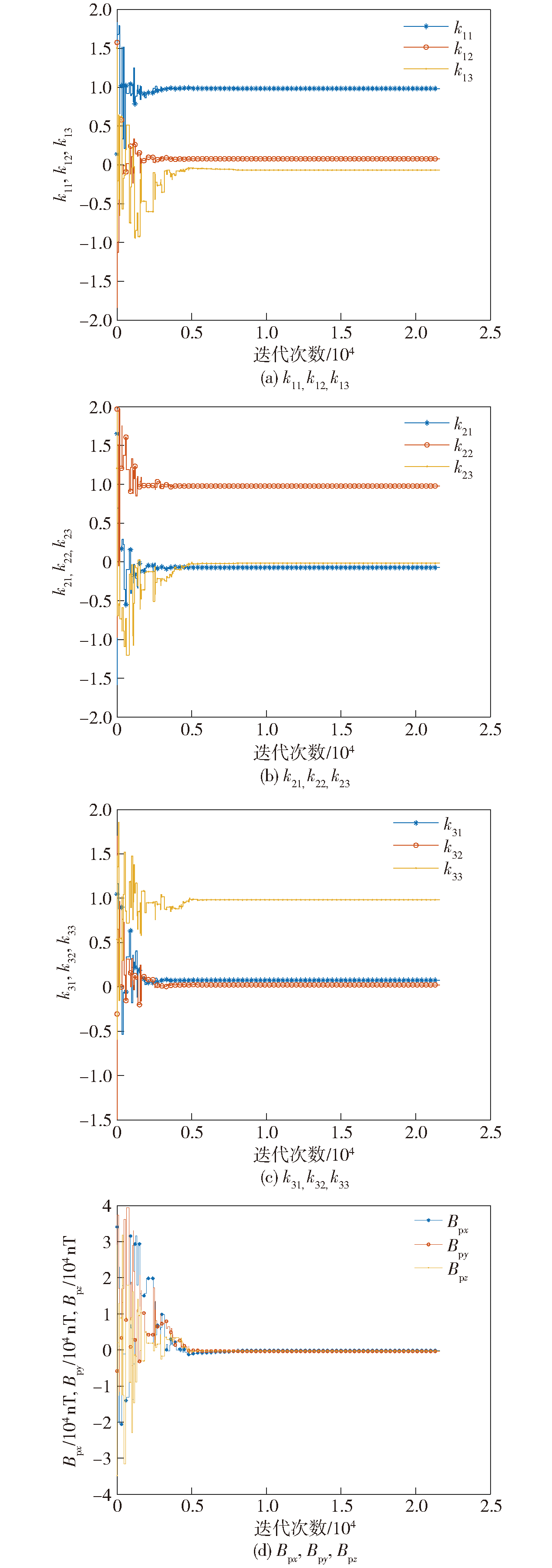
Fig.11 Convergence curve of magnetic interference parameters
| 序号 | Bpx/ nT | Bpy/ nT | Bpz/ nT | 航向角 φ/rad | 横摇角 γ/rad | 纵倾角 θ/rad |
|---|---|---|---|---|---|---|
| 1 | 33253 | 8000 | 35755 | 0 | 0.26062 | 0.03970 |
| 2 | 33314 | -1608 | 36591 | 0 | 0.00181 | 0.04947 |
| 3 | 33237 | -11381 | 34913 | 0 | -0.26326 | 0.05988 |
| 4 | -1335 | -24701 | 42688 | 1.5708 | 0.26191 | 0.04052 |
| 5 | -1535 | -34938 | 34928 | 1.5708 | -0.0007 | 0.05033 |
| 6 | -1770 | -42911 | 24653 | 1.5708 | -0.26270 | 0.06079 |
| 7 | -34999 | 8045 | 33542 | 3.14159 | 0.26182 | 0.04119 |
| 8 | -34957 | -827 | 34681 | 3.14159 | -0.00051 | 0.05000 |
| 9 | -34999 | -9717 | 33434 | 3.14159 | -0.26287 | 0.06148 |
| 10 | -143 | 41096 | 26644 | 4.71239 | 0.26088 | 0.04040 |
| 11 | 120 | 32745 | 36472 | 4.71239 | -0.00120 | 0.04985 |
| 12 | 264 | 22196 | 43788 | 4.71239 | -0.26117 | 0.06044 |
Table 3 AUV magnetic field measurement data sheet
| 序号 | Bpx/ nT | Bpy/ nT | Bpz/ nT | 航向角 φ/rad | 横摇角 γ/rad | 纵倾角 θ/rad |
|---|---|---|---|---|---|---|
| 1 | 33253 | 8000 | 35755 | 0 | 0.26062 | 0.03970 |
| 2 | 33314 | -1608 | 36591 | 0 | 0.00181 | 0.04947 |
| 3 | 33237 | -11381 | 34913 | 0 | -0.26326 | 0.05988 |
| 4 | -1335 | -24701 | 42688 | 1.5708 | 0.26191 | 0.04052 |
| 5 | -1535 | -34938 | 34928 | 1.5708 | -0.0007 | 0.05033 |
| 6 | -1770 | -42911 | 24653 | 1.5708 | -0.26270 | 0.06079 |
| 7 | -34999 | 8045 | 33542 | 3.14159 | 0.26182 | 0.04119 |
| 8 | -34957 | -827 | 34681 | 3.14159 | -0.00051 | 0.05000 |
| 9 | -34999 | -9717 | 33434 | 3.14159 | -0.26287 | 0.06148 |
| 10 | -143 | 41096 | 26644 | 4.71239 | 0.26088 | 0.04040 |
| 11 | 120 | 32745 | 36472 | 4.71239 | -0.00120 | 0.04985 |
| 12 | 264 | 22196 | 43788 | 4.71239 | -0.26117 | 0.06044 |
| 算法 | ΔBx/nT | ΔBy/nT | ΔBz/nT | ΔB/nT |
|---|---|---|---|---|
| OLS | 11.8 | 9.3 | 6.1 | 9.3 |
| L-SHADE | 6.0 | 12.7 | 5.8 | 7.8 |
Table 4 Standard deviation sheet
| 算法 | ΔBx/nT | ΔBy/nT | ΔBz/nT | ΔB/nT |
|---|---|---|---|---|
| OLS | 11.8 | 9.3 | 6.1 | 9.3 |
| L-SHADE | 6.0 | 12.7 | 5.8 | 7.8 |
| [1] |
郭成豹, 胡松, 王文井, 等. 利用磁传感器阵列磁场差值的舰船磁场反演建模方法[J]. 兵工学报, 2022, 43(1): 111-119.
doi: 10.3969/j.issn.1000-1093.2022.01.012 |
|
doi: 10.3969/j.issn.1000-1093.2022.01.012 |
|
| [2] |
王锴松, 周国华, 刘月林, 等. 地磁模拟法测量舰船感应磁场的数值模拟[J]. 兵工学报, 2022, 43(3): 617-625.
doi: 10.12382/bgxb.2021.0110 |
|
doi: 10.12382/bgxb.2021.0110 |
|
| [3] |
周耀忠, 张国友. 舰船磁场分析计算[M]. 北京: 国防工业出版社, 2004.
|
|
|
|
| [4] |
黄琰, 李岩, 俞建成, 等. AUV智能化现状与发展趋势[J]. 机器人, 2020, 42(2): 215-231.
doi: 10.13973/j.cnki.robot.190392 |
|
doi: 10.13973/j.cnki.robot.190392 |
|
| [5] |
王童豪, 彭星光, 潘光, 等. 无人水下航行器的发展现状与关键技术[J]. 宇航总体技术, 2017, 1(4): 52-64.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
刘雪君. 基于水下机器人的磁干扰补偿算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2018.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
曹军宏, 刘飞. 基于ROV的舰船磁场测量方法[J]. 水下无人系统学报, 2021, 29(6): 754-759.
|
|
|
|
| [29] |
陈进明, 隗燕琳. 基于神经网络的磁性目标磁矩反演方法[J]. 船电技术, 2012, 32(9): 57-60.
|
|
|
|
| [30] |
王志锋, 刘大明. 基于差分进化的共面矩形线圈均匀磁场优化[J]. 船电技术, 2012, 32(12): 29-31, 34.
|
|
|
|
| [31] |
卞强, 刘大明, 童余德, 等. 基于差分进化算法的铁磁物体磁化率优化方法[J]. 海军工程大学学报, 2015, 27(3): 1-4, 52.
|
|
|
|
| [32] |
|
| [1] | LIN Yubin, HOU Baolin, BAO Dan, ZHAO Wei. Implicit Lyapunov Function-based Variable Gain Super-twisting Sliding Mode Control of an Ammunition Transfer Manipulator [J]. Acta Armamentarii, 2024, 45(8): 2573-2583. |
| [2] | ZHAO Wei, HOU Baolin, YAN Shaojun, BAO Dan, LIN Yubin. A Dynamic Model of Interval Uncertainty of Rotational Chain Shell Magazine [J]. Acta Armamentarii, 2024, 45(6): 1991-2002. |
| [3] | WEN Hao, HOU Baolin, LIN Yubin, JIN Xin. Dynamic Model Uncertain Parameter Identification for A Curved Chain Rotary Shell Magazine [J]. Acta Armamentarii, 2024, 45(5): 1460-1471. |
| [4] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [5] | ZHU Qixin, JIANG Chenyan, ZHANG Guoping, ZHU Yonghong. Identification of Mechanical Parameters of Permanent Magnet Servo System Based on Orthogonal Characteristics of Trigonometric Function [J]. Acta Armamentarii, 2023, 44(6): 1820-1828. |
| [6] | JIN Xin, ZHOU Ke-dong, HE Lei, HUANG Xue-ying, ZHANG Jun-bin. Parameter Identification of Human Body under Successive Impact [J]. Acta Armamentarii, 2016, 37(4): 598-602. |
| [7] | CHEN Jian, TIAN Liang , SHANG Hong-mo , ZHENG Deng-sheng, WANG Gui-cheng. Identification of Joint Part Parameters of HSK Spindle-toolholder Based on Closed-form Approach [J]. Acta Armamentarii, 2015, 36(7): 1309-1317. |
| [8] | YANG PAN-pan, LIU Ming-yong, LEI Xiao-kang, WU Xiao-jin. Information Coupling Degree-based Fission Control Algorithm for Autonomous Underwater Vehicles withoutVelocity Measurements [J]. Acta Armamentarii, 2015, 36(5): 891-897. |
| [9] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming, HE Bin. AUV's Depth Control Based on Reconstructive Fault-tolerant Control [J]. Acta Armamentarii, 2015, 36(4): 723-730. |
| [10] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming. AUV’s Bottom Following Control Method Based on ADRC [J]. Acta Armamentarii, 2015, 36(10): 1943-1948. |
| [11] | MA Peng, ZHANG Fu-bin, XU De-min, LIU Shu-qiang. Observability Analysis of Cooperative Localization System for MAUV Based on Condition Number [J]. Acta Armamentarii, 2015, 36(1): 138-143. |
| [12] | SHI Ting-na,ZHANG Qian,XIAO You-wen,XIA Chang-liang. Online Parameter Identification and Sliding Mode Observation of Back-electromotive Force of Brushless Direct Current Motors [J]. Acta Armamentarii, 2013, 34(6): 739-747. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||