
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (10): 3619-3630.doi: 10.12382/bgxb.2023.0742
Previous Articles Next Articles
ZHOU Hao, BAO Xiaopeng*( ), ZHANG Honggang
), ZHANG Honggang
Received:2023-08-11
Online:2024-02-06
Contact:
BAO Xiaopeng
CLC Number:
ZHOU Hao, BAO Xiaopeng, ZHANG Honggang. Improved Design of Phase Modulation Compensation and Analysis of Disturbance Suppression for UAV Active Disturbance Rejection Control[J]. Acta Armamentarii, 2024, 45(10): 3619-3630.
Add to citation manager EndNote|Ris|BibTeX
| 参数 | 数值 |
|---|---|
| m/kg | 1.5 |
| l/m | 0.225 |
| g/(m·s-2) | 9.81 |
| Ix/(kg·m2) | 0.03 |
| Iy/(kg·m2) | 0.03 |
| Iz/(kg·m2) | 0.03 |
Table 1 Quadrotor UAV body parameters[9]
| 参数 | 数值 |
|---|---|
| m/kg | 1.5 |
| l/m | 0.225 |
| g/(m·s-2) | 9.81 |
| Ix/(kg·m2) | 0.03 |
| Iy/(kg·m2) | 0.03 |
| Iz/(kg·m2) | 0.03 |

Fig.1 Design structure of phase modulation compensator

Fig.2 Structural framework of PCADRC

Fig.3 Tracking curves of roll angle channels under different h values

Fig.4 Total disturbance of the system observed under different σ values

Fig.5 The degree of coincidence between the disturbance amount compensated by NLSEF and the actual disturbance under different compensation coefficient values
| 组件 | 符号 | 数值 | 组件 | 符号 | 数值 | 组件 | 符号 | 数值 |
|---|---|---|---|---|---|---|---|---|
| TD | r | 10.2 | ESO | β1 | 30 | NLSEF | a1n | 0.65 |
| h | 0.154 | β2 | 300 | a2n | 1.6 | |||
| 调相 补偿 器 | a1 | 0.43 | β3 | 1000 | k1 | 28.6 | ||
| a2 | 2 | a1e | 0.5 | k2 | 22.4 | |||
| λ | 3.8 | a2e | 0.25 | σ | 0.05 | |||
| σ1 | 1 | σ | 0.05 | bi | 35.7 |
Table 2 Control parameter setting values of PCADRC
| 组件 | 符号 | 数值 | 组件 | 符号 | 数值 | 组件 | 符号 | 数值 |
|---|---|---|---|---|---|---|---|---|
| TD | r | 10.2 | ESO | β1 | 30 | NLSEF | a1n | 0.65 |
| h | 0.154 | β2 | 300 | a2n | 1.6 | |||
| 调相 补偿 器 | a1 | 0.43 | β3 | 1000 | k1 | 28.6 | ||
| a2 | 2 | a1e | 0.5 | k2 | 22.4 | |||
| λ | 3.8 | a2e | 0.25 | σ | 0.05 | |||
| σ1 | 1 | σ | 0.05 | bi | 35.7 |
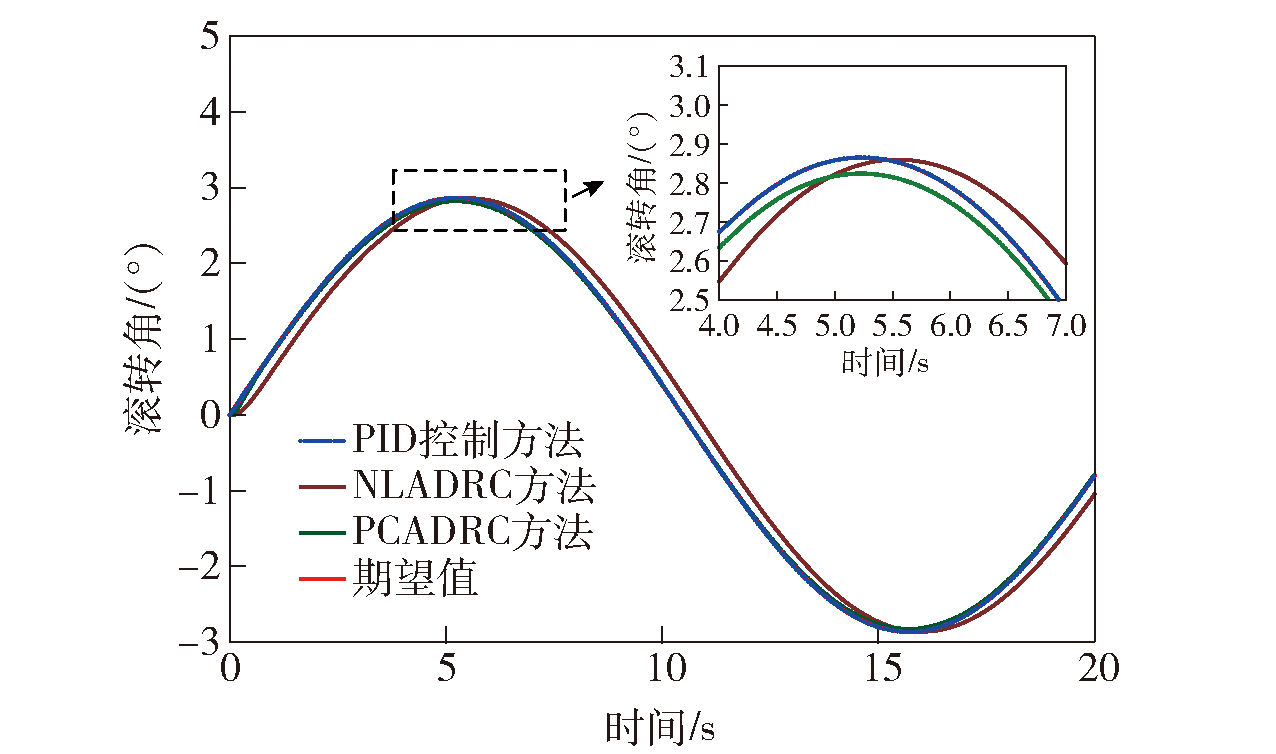
Fig.6 Rolling channel command tracking effect without background noise

Fig.7 Rolling channel noise input command

Fig.8 Roll angle tracking effects of different control methods under white noise background
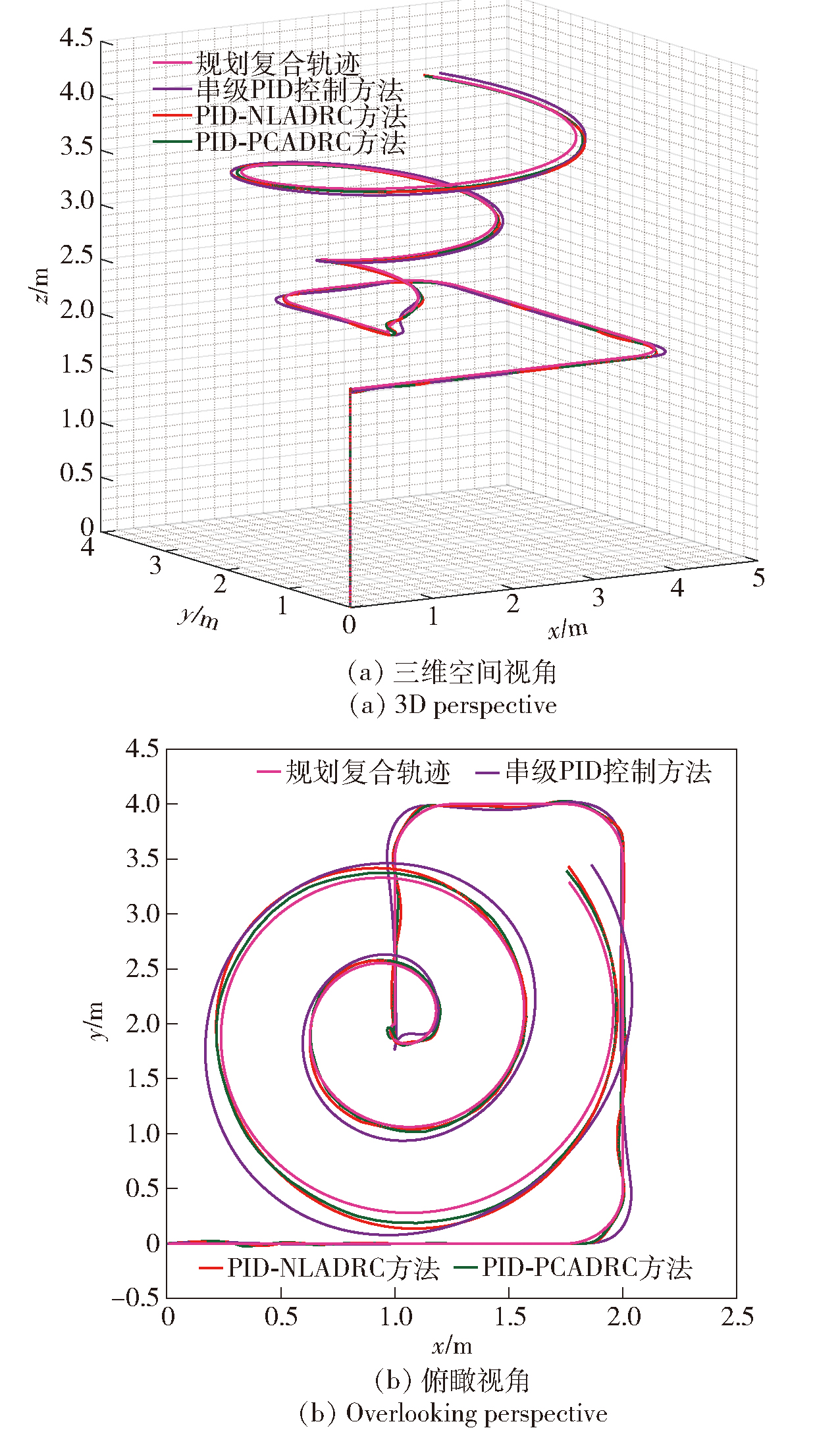
Fig.9 Compound trajectory tracking curve under undisturbed condition
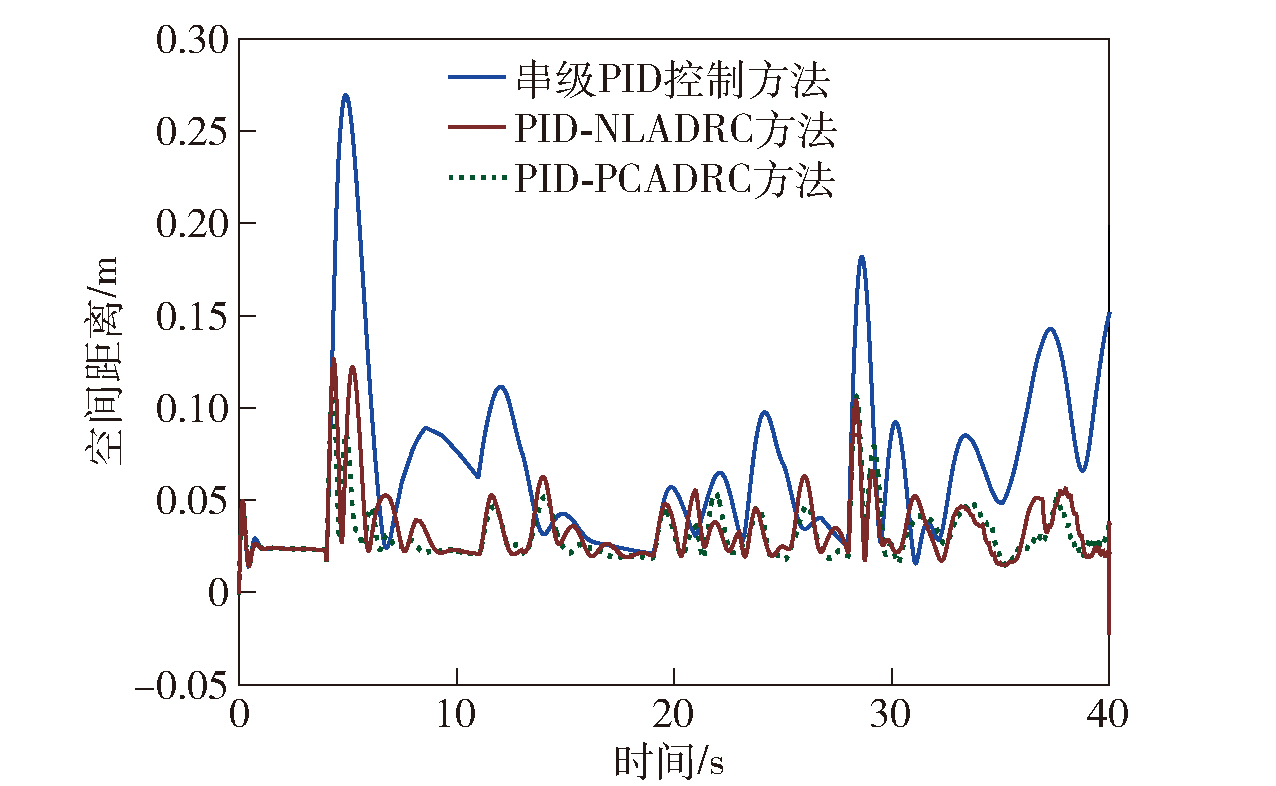
Fig.10 Spatial distancesamong actual trajectory points and lanned trajectory points under undisturbed conditions
| 阶段 | 方法 | 最大值/m | 均值/m | 标准差/m |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.2690 | 0.0596 | 0.0477 |
| PID-NLADRC | 0.1260 | 0.0340 | 0.0186 | |
| PID-PCADRC | 0.1110 | 0.0296 | 0.0131 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.2560 | 0.1150 | 0.0582 |
| PID-NLADRC | 0.1660 | 0.0601 | 0.0397 | |
| PID-PCADRC | 0.1060 | 0.0491 | 0.0249 | |
| 合段 | 串级PID控制 | 0.2690 | 0.0826 | 0.0590 |
| PID-NLADRC | 0.1660 | 0.0449 | 0.0320 | |
| PID-PCADRC | 0.1110 | 0.0377 | 0.0212 |
Table 3 Statistics of trajectory tracking deviations under undisturbed conditions
| 阶段 | 方法 | 最大值/m | 均值/m | 标准差/m |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.2690 | 0.0596 | 0.0477 |
| PID-NLADRC | 0.1260 | 0.0340 | 0.0186 | |
| PID-PCADRC | 0.1110 | 0.0296 | 0.0131 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.2560 | 0.1150 | 0.0582 |
| PID-NLADRC | 0.1660 | 0.0601 | 0.0397 | |
| PID-PCADRC | 0.1060 | 0.0491 | 0.0249 | |
| 合段 | 串级PID控制 | 0.2690 | 0.0826 | 0.0590 |
| PID-NLADRC | 0.1660 | 0.0449 | 0.0320 | |
| PID-PCADRC | 0.1110 | 0.0377 | 0.0212 |
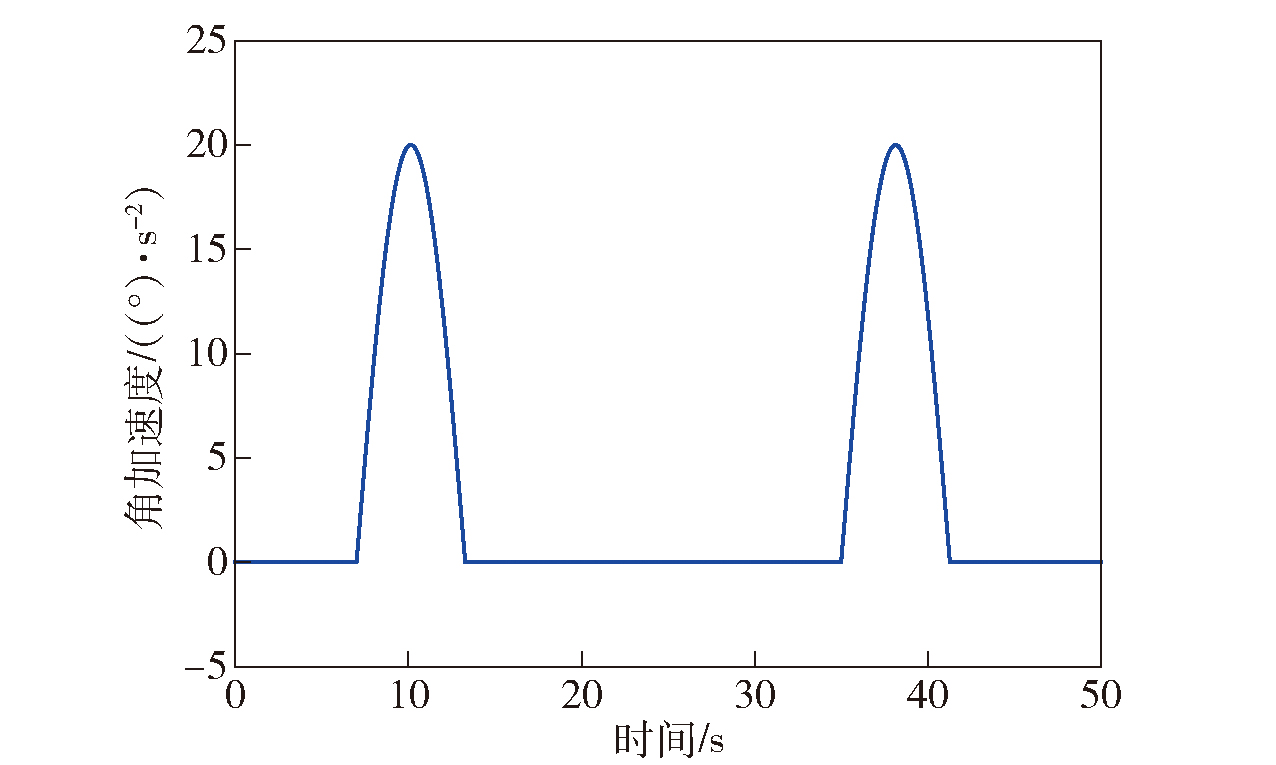
Fig.11 Change of angular acceleration caused by wind disturbance

Fig.12 Composite trajectory tracking curve under wind disturbance conditions
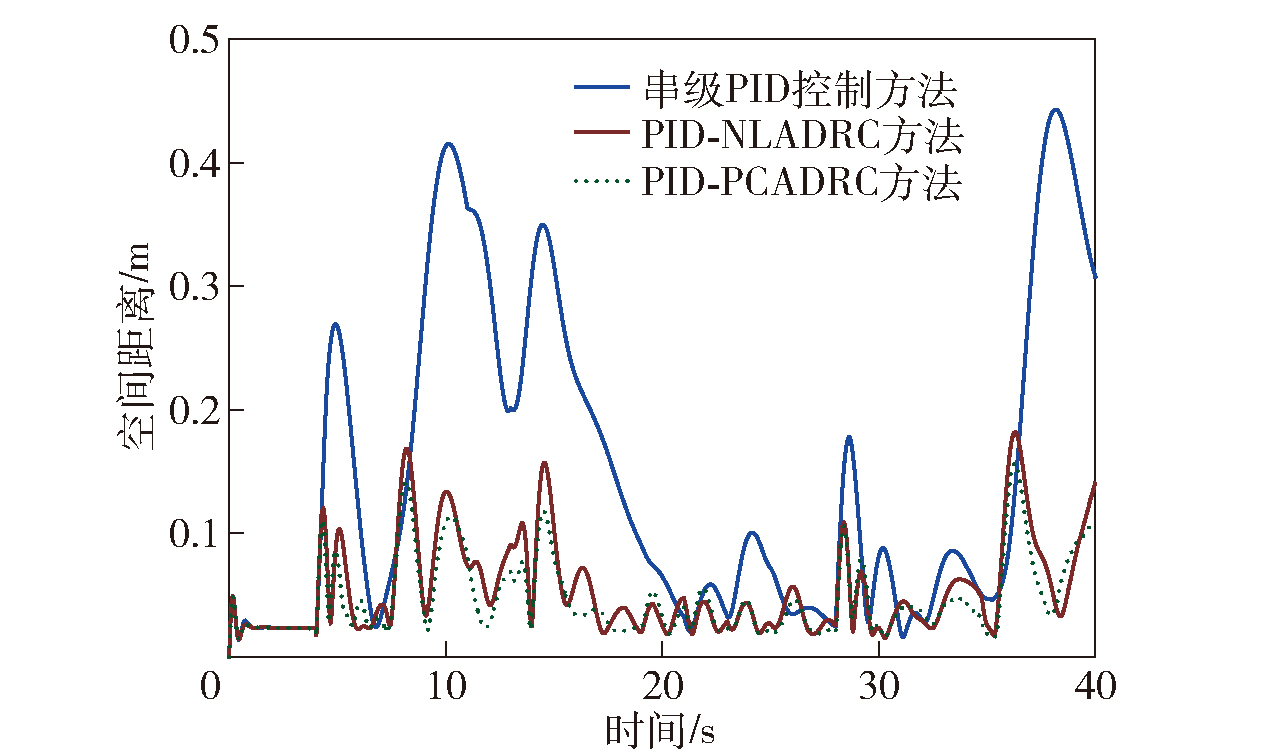
Fig.13 Spatial distances among actual trajectory points and planned trajectory points under wind disturbance conditions
| 阶段 | 控制策略 | 最大值 | 均值 | 标准差 |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.4150 | 0.1410 | 0.1200 |
| PID-ADRC | 0.1690 | 0.0515 | 0.0356 | |
| PID-PCADRC | 0.1420 | 0.0440 | 0.0283 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.4430 | 0.2050 | 0.1430 |
| PID-ADRC | 0.2270 | 0.0945 | 0.5730 | |
| PID-PCADRC | 0.1570 | 0.0790 | 0.0408 | |
| 合段 | 串级PID控制 | 0.4430 | 0.1680 | 0.1340 |
| PID-ADRC | 0.2270 | 0.0694 | 0.0505 | |
| PID-PCADRC | 0.1570 | 0.0586 | 0.0382 |
Table 4 Statistics of trajectory tracking deviations under wind disturbance conditions
| 阶段 | 控制策略 | 最大值 | 均值 | 标准差 |
|---|---|---|---|---|
| 空中避障 轨迹段 | 串级PID控制 | 0.4150 | 0.1410 | 0.1200 |
| PID-ADRC | 0.1690 | 0.0515 | 0.0356 | |
| PID-PCADRC | 0.1420 | 0.0440 | 0.0283 | |
| 锥形螺旋 轨迹段 | 串级PID控制 | 0.4430 | 0.2050 | 0.1430 |
| PID-ADRC | 0.2270 | 0.0945 | 0.5730 | |
| PID-PCADRC | 0.1570 | 0.0790 | 0.0408 | |
| 合段 | 串级PID控制 | 0.4430 | 0.1680 | 0.1340 |
| PID-ADRC | 0.2270 | 0.0694 | 0.0505 | |
| PID-PCADRC | 0.1570 | 0.0586 | 0.0382 |
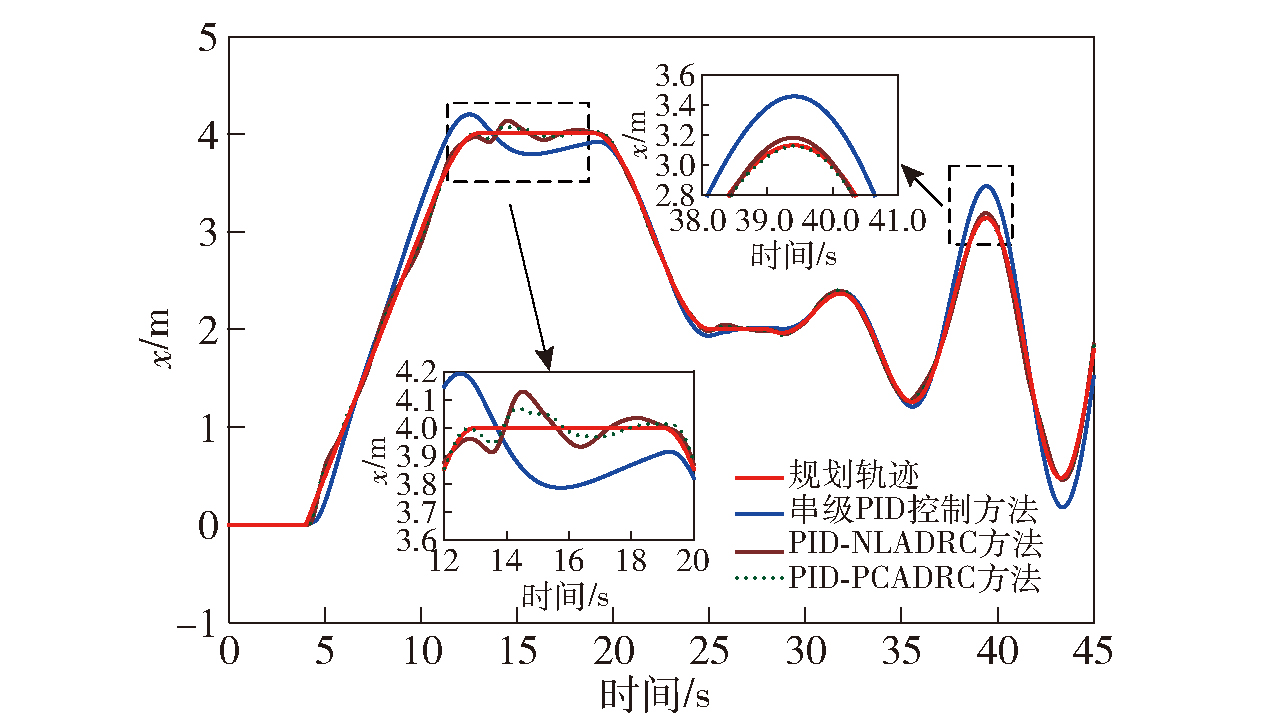
Fig.14 Tracking curve of Channel x under interference conditions
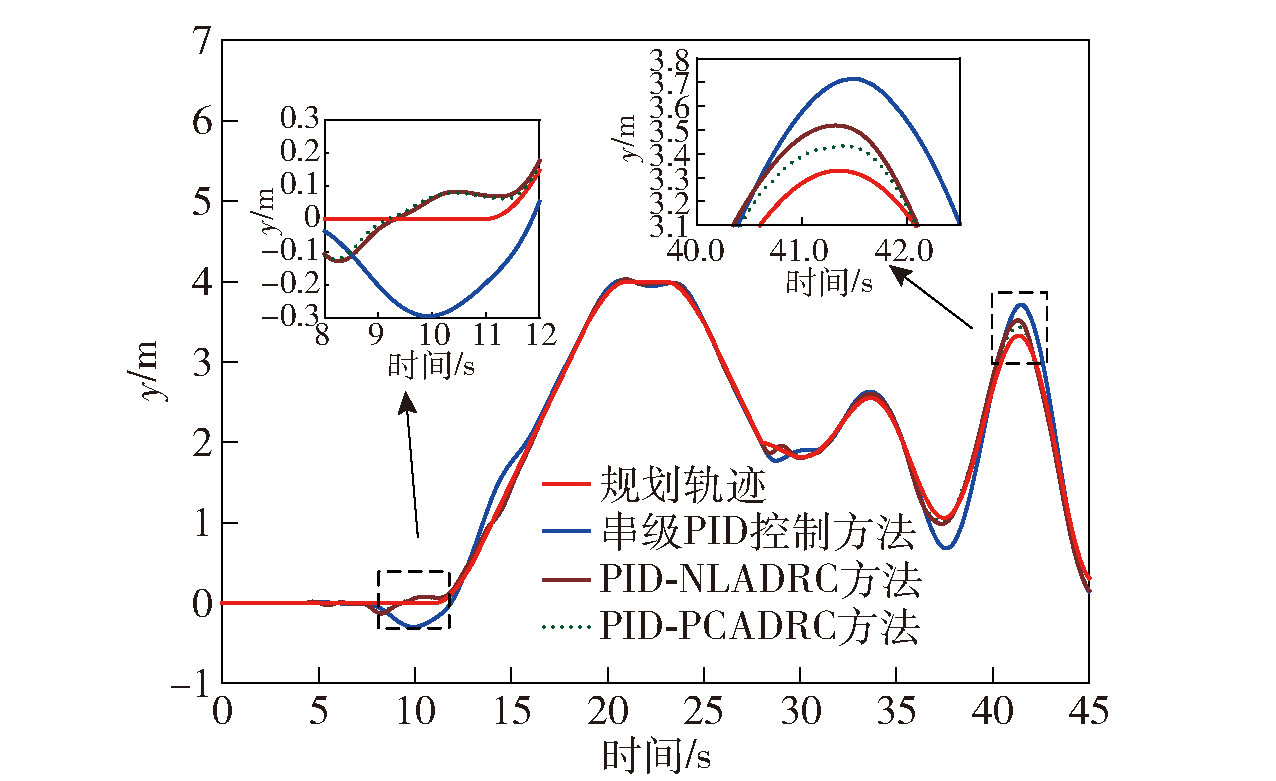
Fig.15 Tracking curve of of Channel y under interference conditions

Fig.16 Crazyflie drone

Fig.17 Crazyflie drone experimental environment
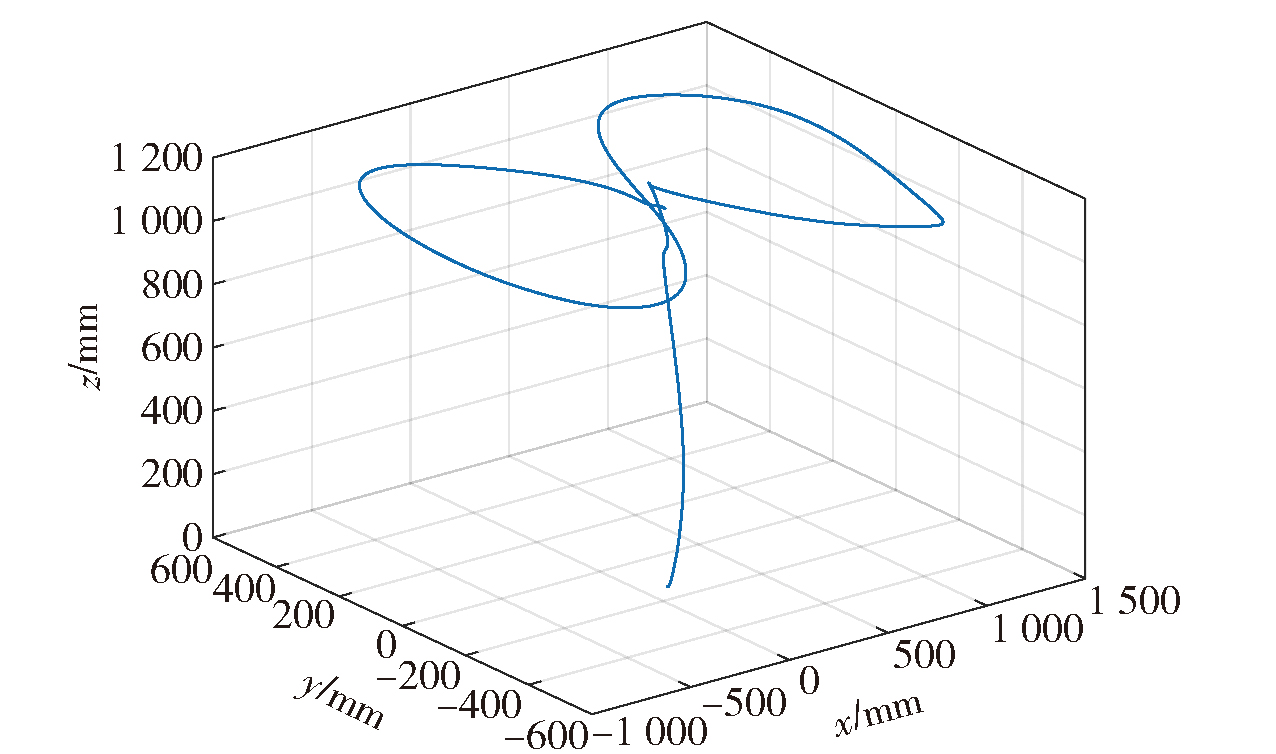
Fig.18 Trajectory tracking curves under NLADRC application
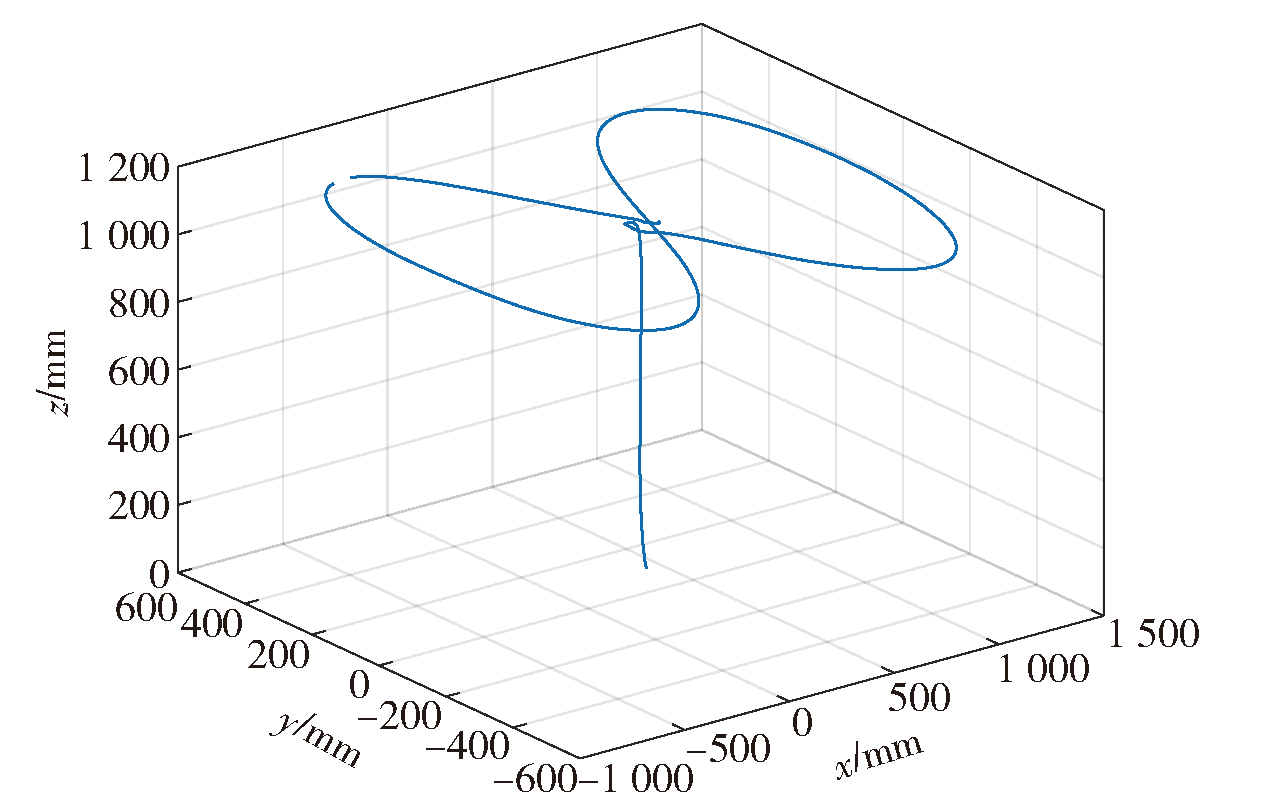
Fig.19 Trajectory tracking curves under PCADRC application
| [1] |
修杨, 邓宏彬, 危怡然, 等. 基于参数估计的四旋翼无人机自适应鲁棒路径跟随控制器[J]. 兵工学报, 2022, 43(8): 1926-1938.
|
|
|
|
| [2] |
刚桂虎, 赵显. 小型旋翼无人机在未来城市军事行动应用中潜力评估[J]. 国防科技, 2017, 38(2): 33-37.
|
|
|
|
| [3] |
|
| [4] |
MOHAMEDO,
|
| [5] |
张智轩, 李涛, 伍鹏飞, 等. 改进混沌粒子群算法的四旋翼PID姿态控制[J]. 电光与控制, 2022, 29(3): 16-20.
|
|
|
|
| [6] |
韩京清. 自抗扰控制技术:估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008: 183-192.
|
|
|
|
| [7] |
吴义忠, 陈立平. 多领域物理系统的仿真优化方法[M]. 北京: 科学出版社, 2011: 56-58.
|
|
|
|
| [8] |
|
| [9] |
刘祚时, 陈飞, 徐燕生, 等. 四旋翼飞行仿真器的PID神经元网络控制器设计[J]. 机械设计与制造, 2023(1): 150-153, 158.
|
|
|
|
| [10] |
王思孝, 赵文军, 张浩, 等. 基于微分跟踪器的共轴反桨无人机串级TD-PID控制算法[J]. 浙江大学学报(工学版), 2021, 55(12): 2359-2364.
|
|
|
|
| [11] |
|
| [12] |
肖友刚, 童俊豪. 基于联合观测与前馈补偿的四旋翼无人机自抗扰控制[J]. 应用数学和力学, 2023, 44(3): 229-240.
|
|
|
|
| [13] |
石晓洁, 蔡家斌, 宋建, 等. 风干扰下无人机自抗扰控制参数自整定[J]. 组合机床与自动化加工技术, 2021(6): 67-71.
doi: 10.13462/j.cnki.mmtamt.2021.06.016 |
|
|
|
| [14] |
|
| [15] |
刘怡恒, 张和洪, 龙志强, 等. 基于改进跟踪微分器的磁浮列车悬浮控制研究[J]. 机车电传动, 2023(2): 113-122.
|
|
|
|
| [16] |
李宏扬. 跟踪微分器改进算法的应用分析[J]. 吉林大学学报(信息科学版), 2021, 39(1): 45-50.
|
|
|
|
| [17] |
张帆, 徐华中, 向云, 等. 针对含噪信号的自适应跟踪微分器改进研究[J]. 电光与控制, 2017, 24(3): 60-63, 101.
|
|
|
|
| [18] |
|
| [19] |
赵志良. 非线性自抗扰控制的收敛性[D]. 合肥: 中国科学技术大学, 2013.
|
|
|
|
| [20] |
万慧, 齐晓慧, 李杰. 基于线性矩阵不等式的线性/非线性切换自抗扰控制系统的稳定性分析[J]. 上海交通大学学报, 2022, 56(11): 1491-1501.
doi: 10.16183/j.cnki.jsjtu.2021.203 |
|
|
|
| [21] |
高志强. 自抗扰控制的传承与发展[J]. 控制理论与应用, 2023, 40: 93-95.
|
|
|
|
| [22] |
葛立明, 李宗刚, 王世伟, 等. 基于调节/观测时间的自抗扰控制器参数整定[J]. 控制与决策, 2017, 32(7): 1333-1337.
|
|
|
|
| [23] |
蔡雨晴. 非线性NLADRC控制及参数整定研究[D]. 北京: 北京化工大学, 2022.
|
|
|
| [1] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [2] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [3] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [4] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [5] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [6] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [7] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [8] | PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit [J]. Acta Armamentarii, 2023, 44(11): 3279-3294. |
| [9] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [10] | WANG Bao-yuan, SHAO Xiao-jun, LIU Peng-ke, HENG Gang, CHAO Hong-xiao, LIU Jun. Research on Measuring Method of Nutation Angle of Projectile Based on Trajectory Tracking with High Speed Photography [J]. Acta Armamentarii, 2016, 37(7): 1312-1316. |
| [11] | DONG Zao-peng, WAN Lei, SUN Yu-shan, LIU Tao, LI Yue-ming, ZHANG Guo-cheng. Trajectory Tracking Control of an Underactuated Unmanned Marine Vehicle Based on Asymmetric Model [J]. Acta Armamentarii, 2016, 37(3): 471-481. |
| [12] | LI Zeng-yan, LI Xiao-min, LIU Qiu-sheng. Trajectory Tracking Algorithm for Motion Compensation of Loitering Munition under Wind Environment [J]. Acta Armamentarii, 2016, 37(12): 2377-2384. |
| [13] | YANG Yong-tai, RONG Ji-li, LI Jian, LIU Bin, HU Cheng-wei. Dynamic Modeling and Control of Space Manipulator with Flexible Joints and Links [J]. Acta Armamentarii, 2014, 35(7): 1003-1008. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||