
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (6): 1837-1845.doi: 10.12382/bgxb.2022.0217
Previous Articles Next Articles
ZHENG Lei1, CHEN Zhimin1,*( ), JIA Yuxuan2
), JIA Yuxuan2
Received:2022-03-31
Online:2023-06-30
Contact:
CHEN Zhimin
ZHENG Lei, CHEN Zhimin, JIA Yuxuan. UAV Swarm Tracking Method Based on Wide-Area Deployment of Intelligent Reflecting Surfaces[J]. Acta Armamentarii, 2023, 44(6): 1837-1845.
Add to citation manager EndNote|Ris|BibTeX
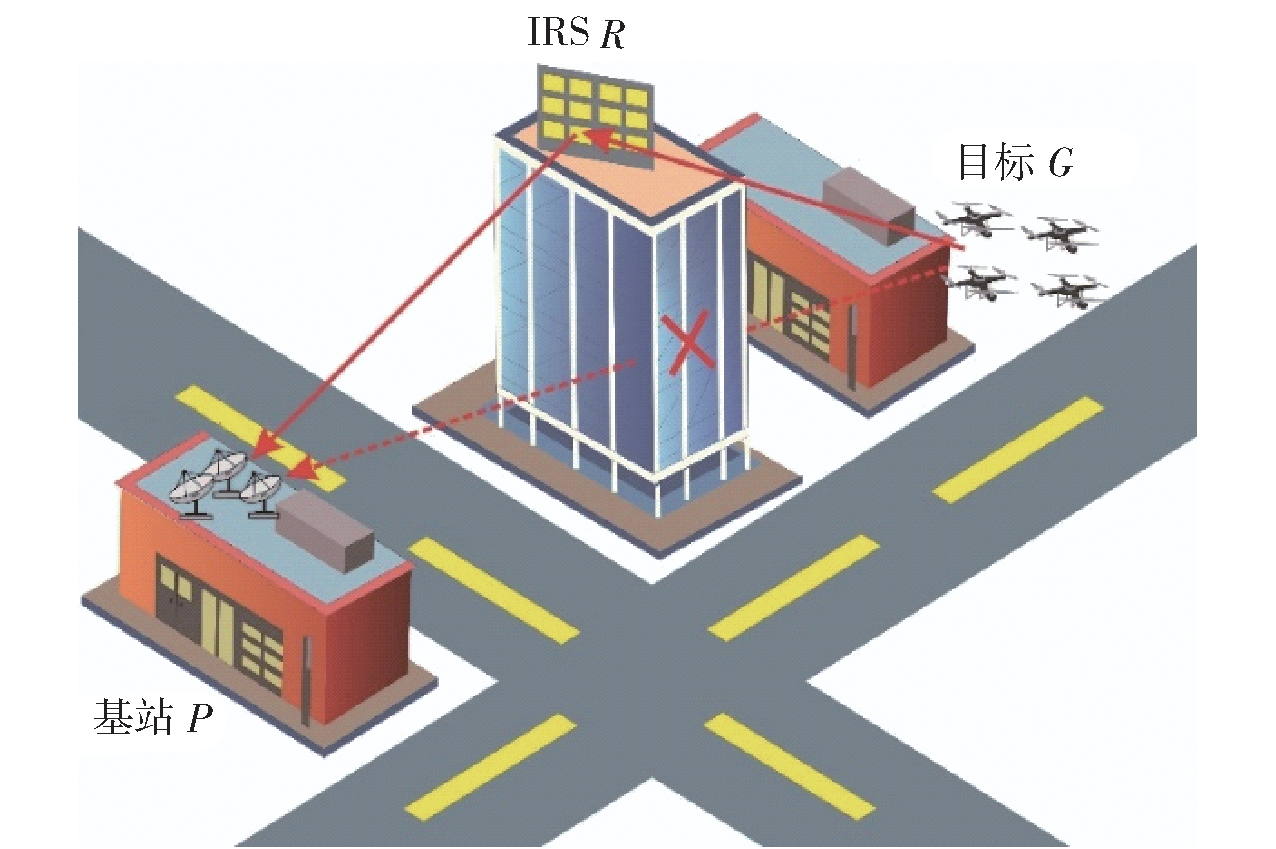
Fig.1 Multi-target tracking scenario
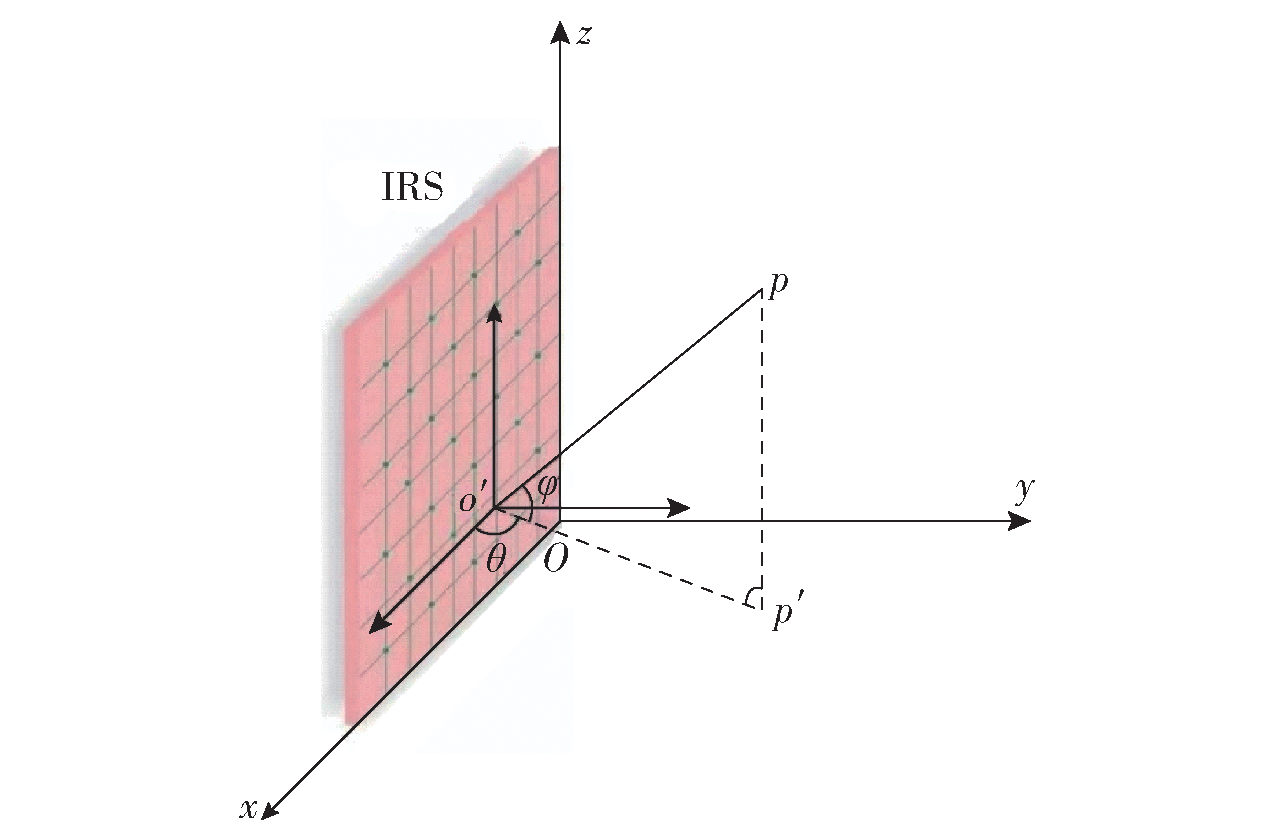
Fig.2 IRS array response
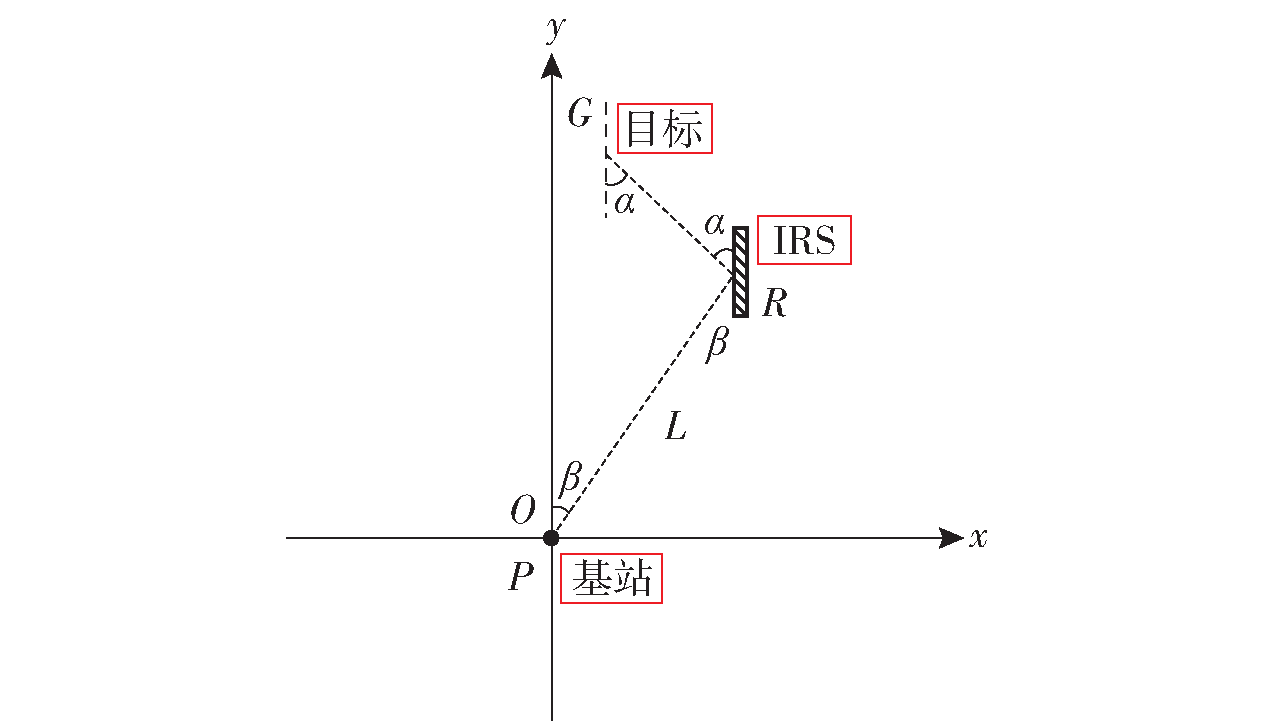
Fig.3 IRS plane diagram
| 目标 | x/m | y/m | vx/(m·s-1) | vy/(m·s-1) |
|---|---|---|---|---|
| 1 | 3800 | 2800 | 15 | -8 |
| 2 | 3800 | 2500 | 15 | 8 |
Table 1 Multi-target motion parameters
| 目标 | x/m | y/m | vx/(m·s-1) | vy/(m·s-1) |
|---|---|---|---|---|
| 1 | 3800 | 2800 | 15 | -8 |
| 2 | 3800 | 2500 | 15 | 8 |
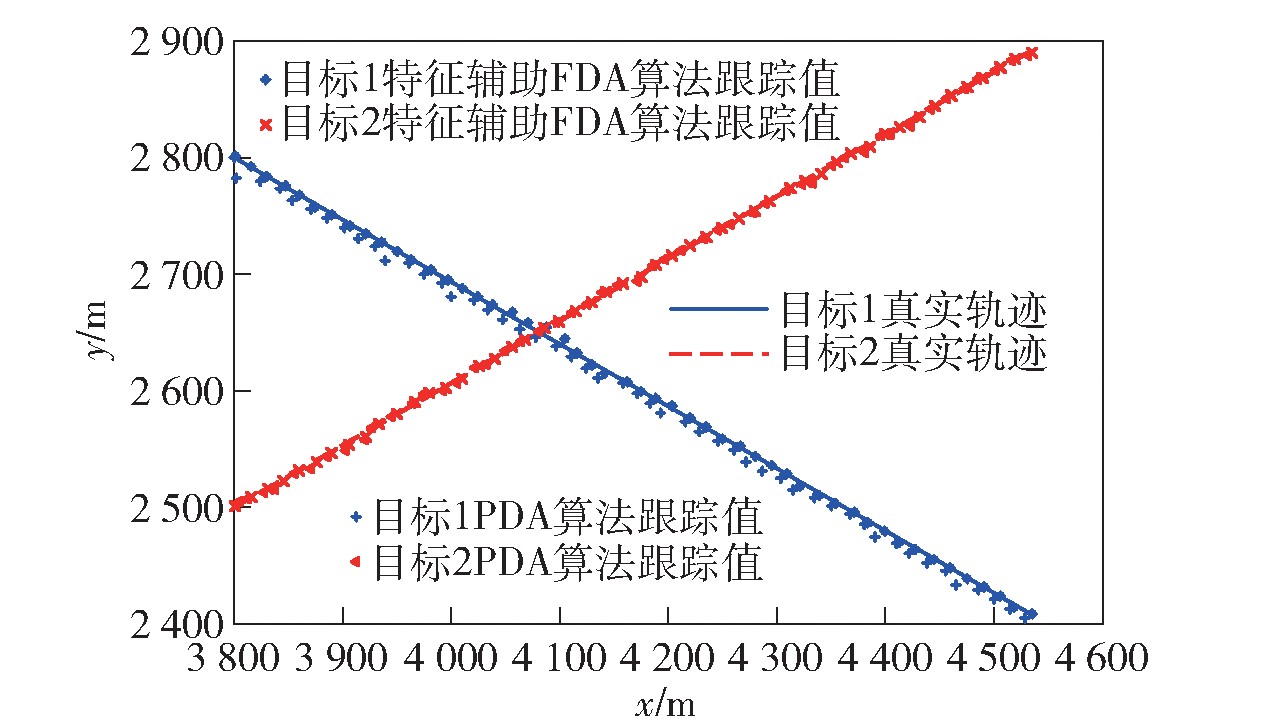
Fig.4 Real trajectory of the target
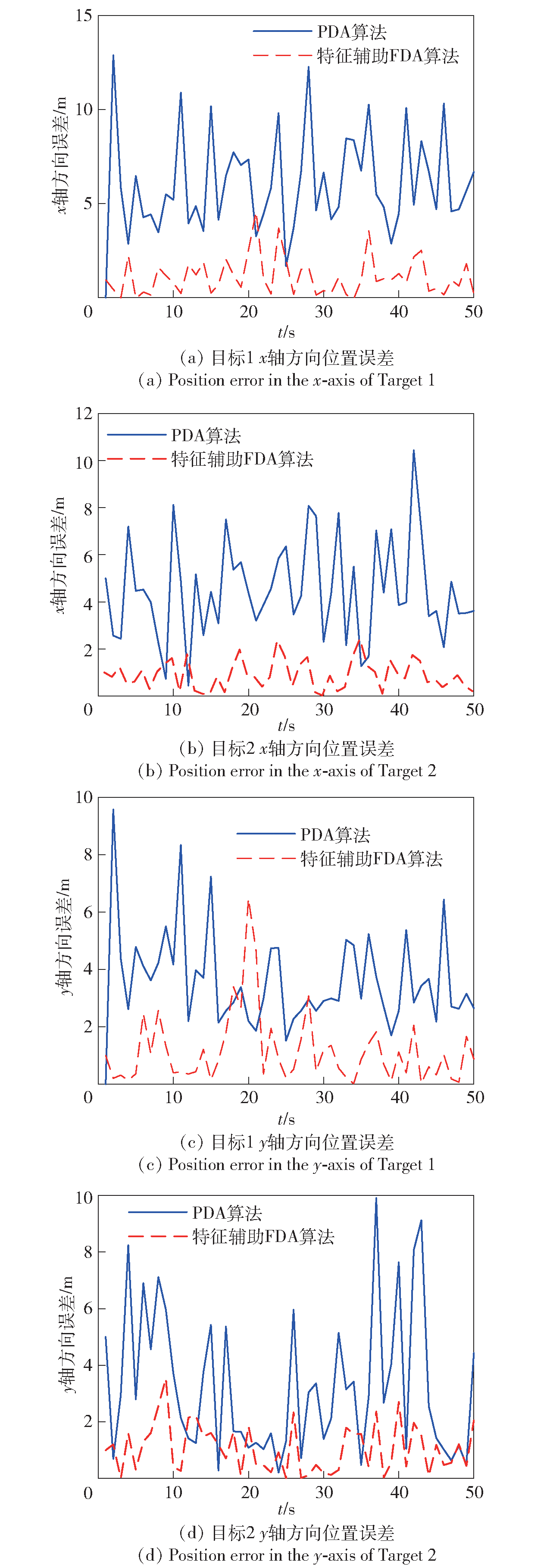
Fig.5 Target position errors
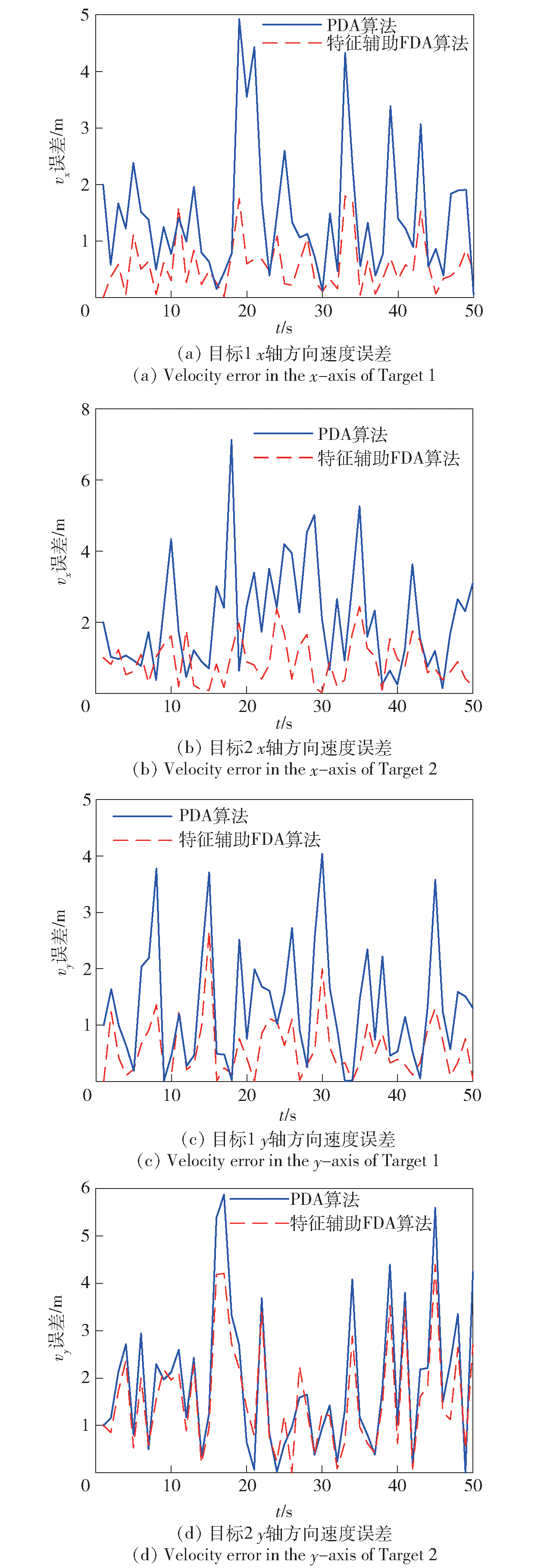
Fig.6 Target velocity errors
| 算法 | 目标 | 位置/m | 速度/(m·s-1) | ||
|---|---|---|---|---|---|
| x轴方向 | y轴方向 | x轴方向 | y轴方向 | ||
| 特征辅助 FDA算法 | 1 | 0.304 | 0.486 | 0.447 | 1.420 |
| 2 | 0.435 | 1.978 | 3.186 | 0.907 | |
| PDA算法 | 1 | 8.587 | 5.106 | 0.709 | 3.727 |
| 2 | 6.054 | 4.173 | 8.485 | 1.794 | |
Table 2 Root mean square errors of the two algorithms
| 算法 | 目标 | 位置/m | 速度/(m·s-1) | ||
|---|---|---|---|---|---|
| x轴方向 | y轴方向 | x轴方向 | y轴方向 | ||
| 特征辅助 FDA算法 | 1 | 0.304 | 0.486 | 0.447 | 1.420 |
| 2 | 0.435 | 1.978 | 3.186 | 0.907 | |
| PDA算法 | 1 | 8.587 | 5.106 | 0.709 | 3.727 |
| 2 | 6.054 | 4.173 | 8.485 | 1.794 | |
| 算法 | 跟踪精度/m | 关联时间/s | |
|---|---|---|---|
| 目标1 | 目标2 | ||
| 特征辅助的FDA算法 | 1.698 2 | 1.747 2 | 0.038 5 |
| PDA算法 | 7.198 4 | 6.041 3 | 0.007 0 |
Table 3 Statistical results of the two algorithms
| 算法 | 跟踪精度/m | 关联时间/s | |
|---|---|---|---|
| 目标1 | 目标2 | ||
| 特征辅助的FDA算法 | 1.698 2 | 1.747 2 | 0.038 5 |
| PDA算法 | 7.198 4 | 6.041 3 | 0.007 0 |
| [1] |
张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.016 |
|
| [2] |
屈旭涛, 庄东晔, 谢海斌. “低慢小”无人机探测方法[J]. 指挥控制与仿真, 2020, 42(2): 128-135.
doi: 10.3969/j.issn.1673-3819.2020.02.024 |
|
|
|
| [3] |
|
| [4] |
doi: 10.1109/LWC.5962382 URL |
| [5] |
doi: 10.1109/LWC.5962382 URL |
| [6] |
doi: 10.1109/TAP.2013.2287296 URL |
| [7] |
|
| [8] |
doi: 10.1103/PhysRevX.6.041008 URL |
| [9] |
|
| [10] |
杨万海. 多传感器数据融合及其应用[M]. 西安: 西安电子科技大学出版社, 2004.
|
|
|
|
| [11] |
李康, 丁国如, 李京华, 等. 无源定位技术发展动态及其应用分析[J]. 航空兵器, 2021, 28(2): 104-112.
|
|
|
|
| [12] |
doi: 10.1109/JSEN.2021.3089206 URL |
| [13] |
|
| [14] |
|
| [15] |
何友, 修建娟, 张晶炜, 等. 雷达数据处理及应用[M]. 第2版. 北京: 电子工业出版社, 2013.
|
|
|
|
| [16] |
邹汝平, 刘建书. 基于概率假设密度滤波与无迹Kalman滤波的多目标跟踪与识别[J]. 兵工学报, 2020, 41(8):1502-1508.
doi: 10.3969/j.issn.1000-1093.2020.08.004 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.004 |
|
| [17] |
邢慧, 颜景龙, 张树江. 基于Kalman滤波的稳像技术研究[J]. 兵工学报, 2007, 28(2): 175-177.
|
|
|
|
| [18] |
doi: 10.1109/TME.1964.4323129 URL |
| [19] |
doi: 10.1109/7.532259 URL |
| [20] |
doi: 10.1109/JPROC.2003.823149 URL |
| [21] |
doi: 10.1109/LSP.2021.3099980 URL |
| [22] |
|
| [23] |
赵峰. 特征辅助的多目标数据关联算法研究[D]. 长沙: 国防科学技术大学, 2010.
|
|
|
| [1] | XU Baorong, ZHANG Jinle, WAN Li, WU Haoyang, WANG Liyong. A Service Status Identification Method of Comprehensive Transmission Based on Multi-sensor Data Association [J]. Acta Armamentarii, 2024, 45(2): 574-583. |
| [2] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [3] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [4] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [5] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [6] | CAO Yan, LONG Teng, SUN Jingliang, ZHOU Yuze. Distributed Task Allocation Algorithm for Multiple Unmanned Aerial Vehicle Based on Information Retransmission and Package Loss Compensation [J]. Acta Armamentarii, 2023, 44(9): 2697-2708. |
| [7] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| [8] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [9] | HAN Yu, SONG Tao, ZHENG Duo, LIU Xin. Unmanned Aerial Vehicle Cluster Cooperative Guidance Technology Based on Conflict Trigger Mechanism [J]. Acta Armamentarii, 2023, 44(7): 1881-1895. |
| [10] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| [11] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [12] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [13] | SHI Xiao-bin, GU Hong, LIU Yan-hua, HUANG Jin-jie. Study of Beam Scheduling for Battlefield Surveillance Phased Array Radar [J]. Acta Armamentarii, 2016, 37(7): 1220-1228. |
| [14] | LIU Zhong, GAO Xiao-guang, FU Xiao-wei, MOU Zhi-ying. Coalition Formation of Multiple Heterogeneous Unmanned Aerial Vehicles in Cooperative Search and Attack in UnknownEnvironment [J]. Acta Armamentarii, 2015, 36(12): 2284-2297. |
| [15] | WANG Bing, LI Hong-ru, CHEN Qiang-hua, XU Bao-hua. Rolling Bearing Performance Degradative State Recognition Based on Mathematical Morphological Fractal Dimension andFuzzy Center Means [J]. Acta Armamentarii, 2015, 36(10): 1982-1990. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||