
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (6): 1576-1587.doi: 10.12382/bgxb.2022.0211
Previous Articles Next Articles
ZHANG Kun1,2,*( ), LIU Zekun1, HUA Shuai1, ZHANG Zhenchong1, LI Ke1, YU Jingting3
), LIU Zekun1, HUA Shuai1, ZHANG Zhenchong1, LI Ke1, YU Jingting3
Received:2022-03-30
Online:2023-06-30
Contact:
ZHANG Kun
ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS[J]. Acta Armamentarii, 2023, 44(6): 1576-1587.
Add to citation manager EndNote|Ris|BibTeX
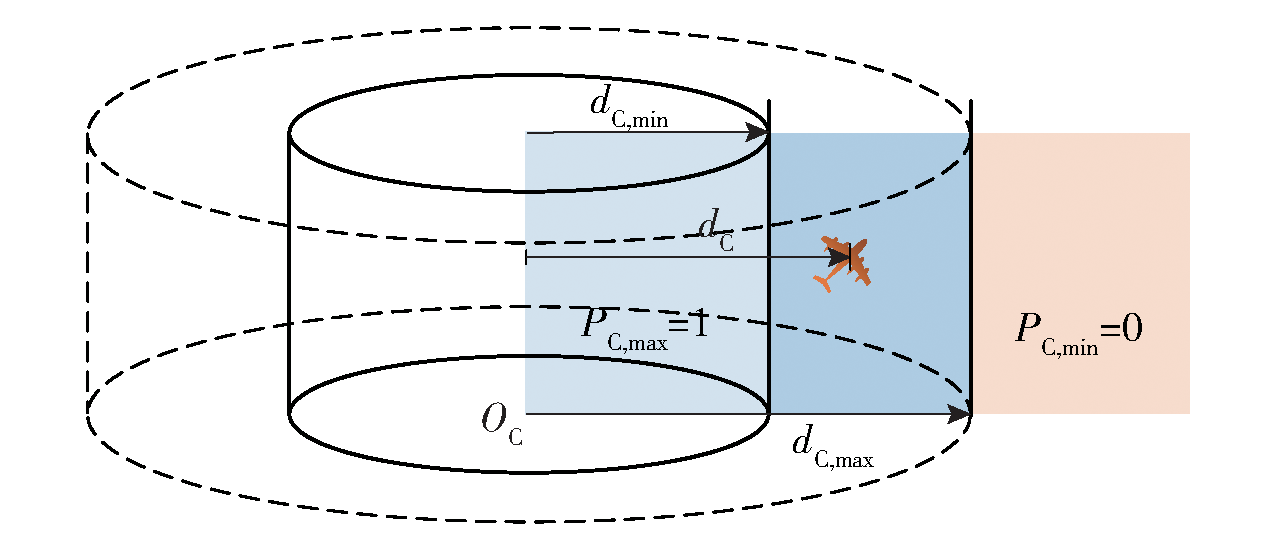
Fig.1 Adverse climate threat zone
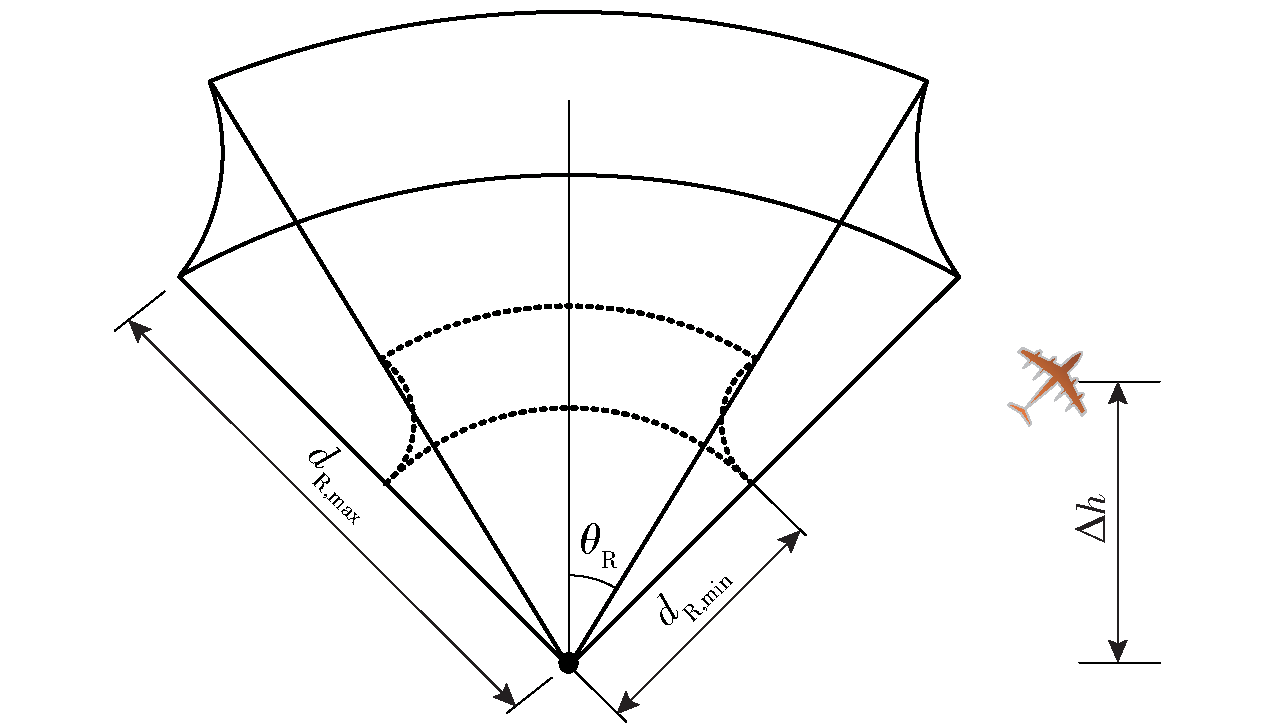
Fig.2 Radar threat zone
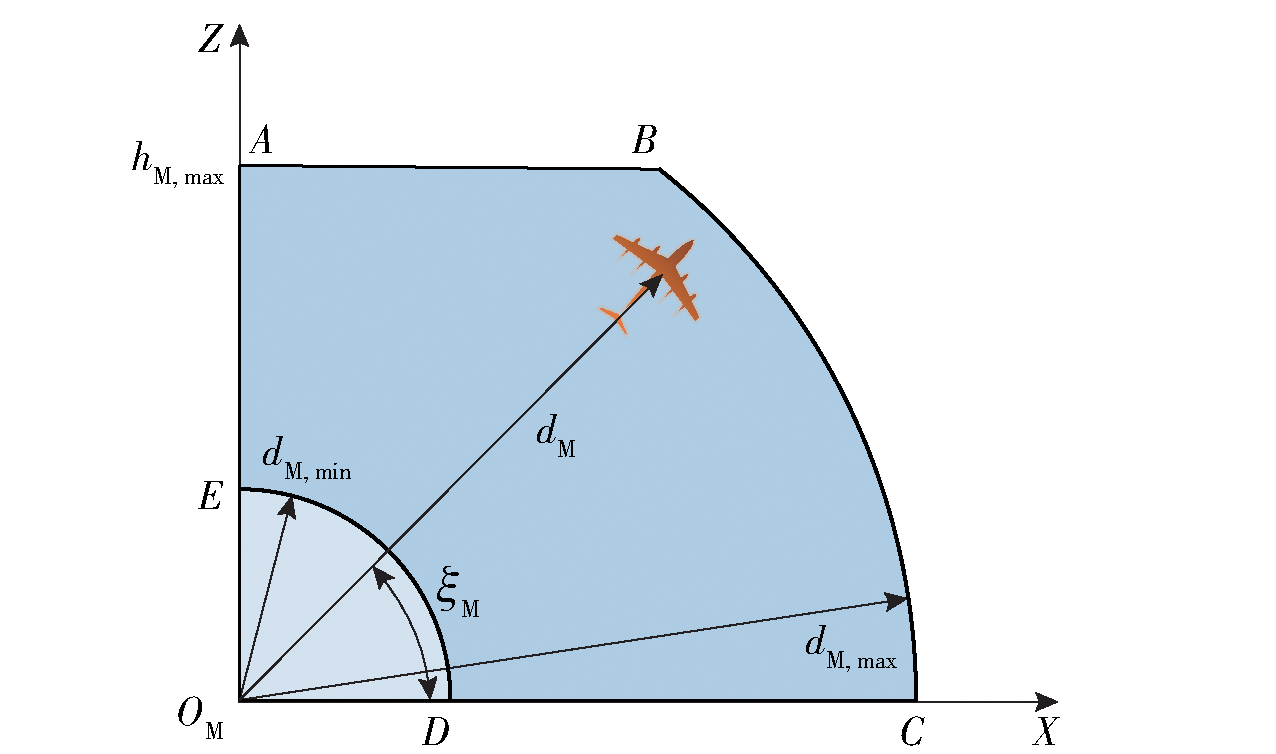
Fig.3 Air defense missile threat zone
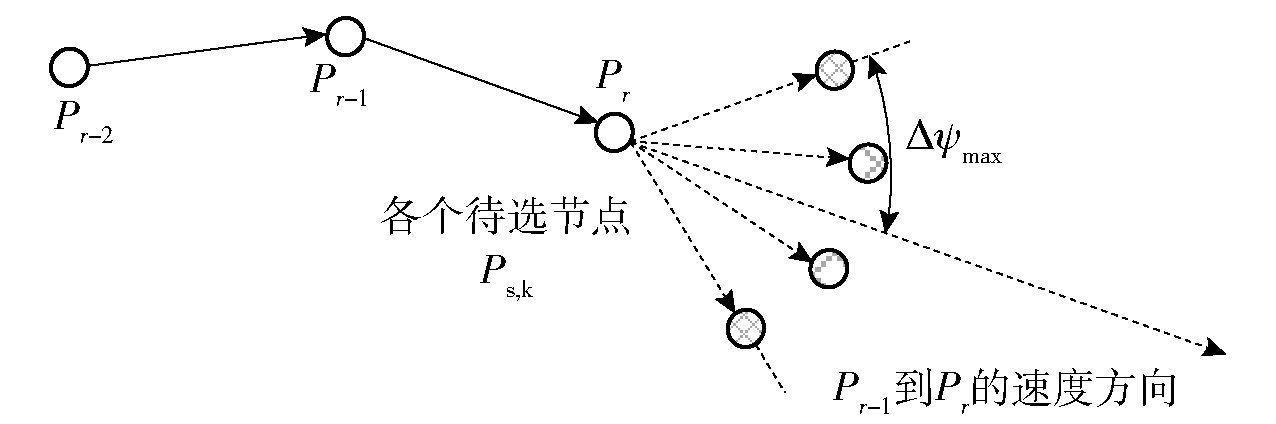
Fig.4 Horizontal plane node expansion mode of SAS algorithm
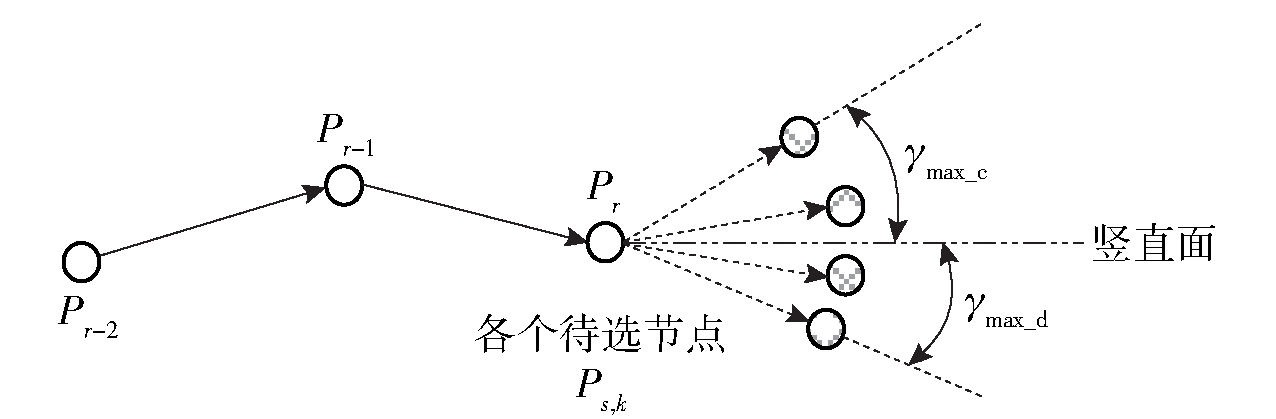
Fig.5 Vertical plane node expansion mode of SAS algorithm
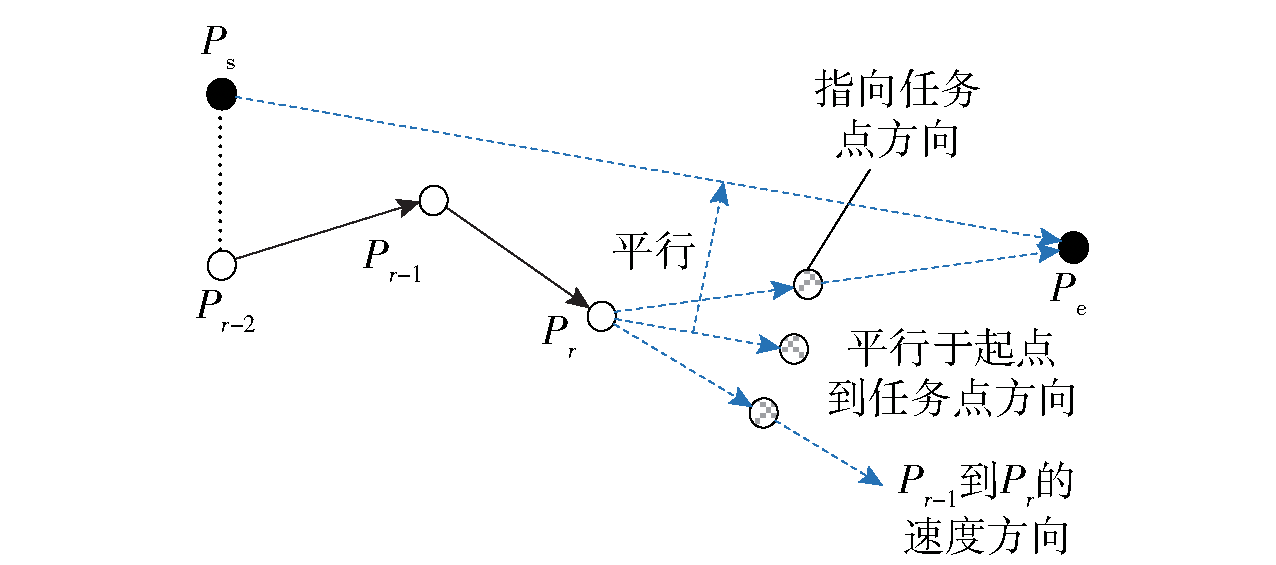
Fig.6 Improved model of flight node expansion
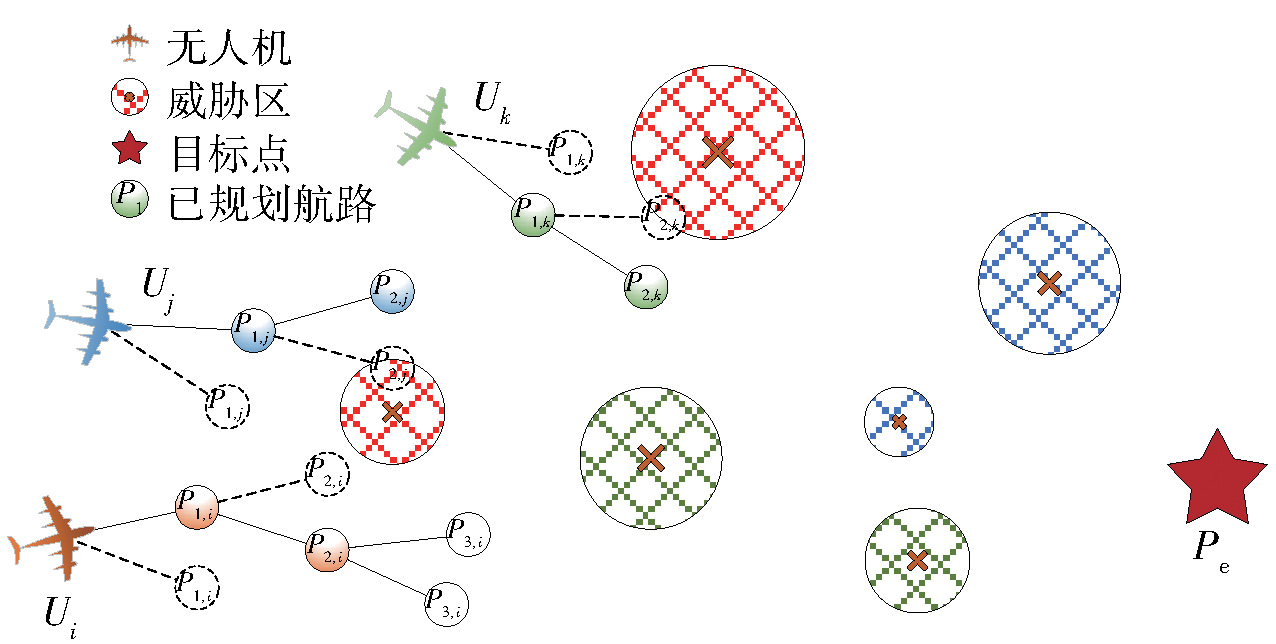
Fig.7 Planning process of concurrent expansion algorithm
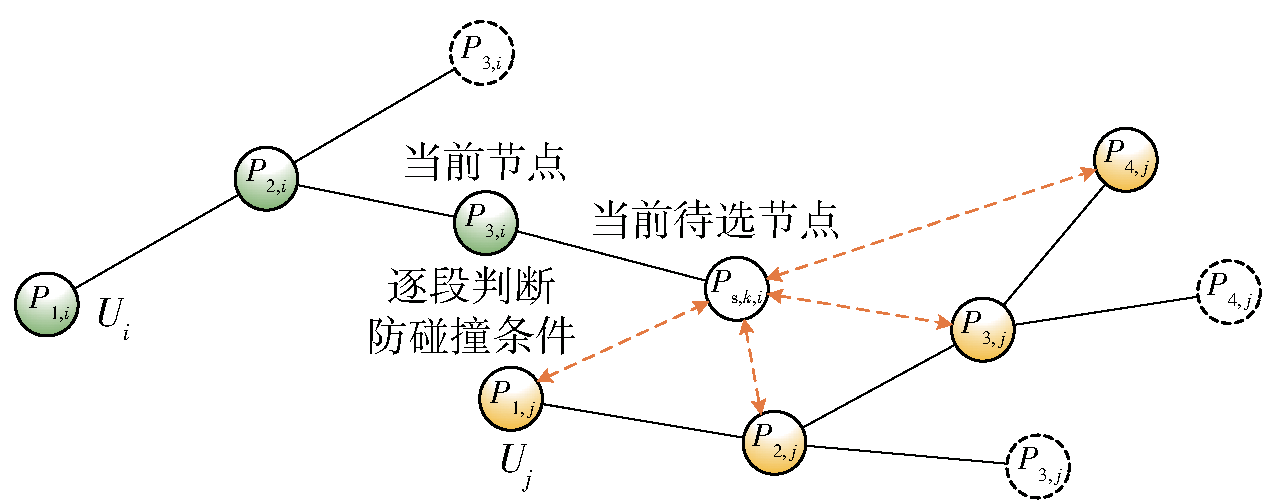
Fig.8 Realization of anti-collision constraints
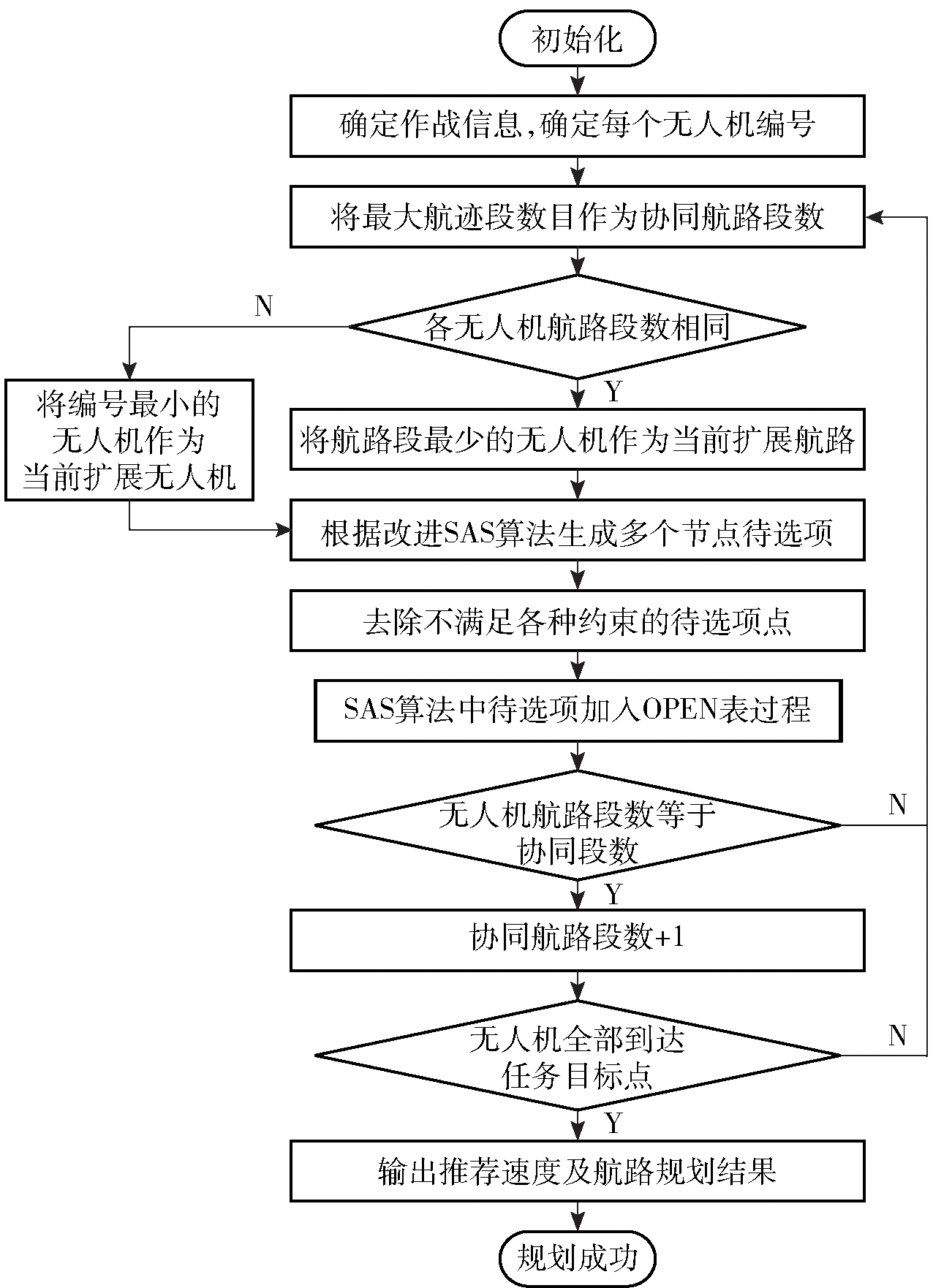
Fig.9 Algorithm flow of the generation of multi-UAV four-dimensional cooperative attack route based on T/S-SAS algorithm
| 编号 | 威胁 种类 | 威胁二维中心 坐标/km | 最大威胁 高度/km | 最大威胁 半径/km |
|---|---|---|---|---|
| 1 | 山峰威胁 | (45.0, 72.0) | 3.0 | 15.0 |
| 2 | 山峰威胁 | (67.0, 40.0) | 1.5 | 10.0 |
| 3 | 山峰威胁 | (31.0, 28.0) | 2.0 | 10.0 |
| 4 | 山峰威胁 | (88.0, 26.0) | 2.5 | 12.0 |
| 5 | 雷达威胁 | (60.0, 52.0) | 12.0 | 12.0 |
| 6 | 雷达威胁 | (81.0, 55.0) | 8.0 | 8.0 |
| 7 | 雷达威胁 | (57.0, 86.0) | 10.0 | 10.0 |
| 8 | 雷达威胁 | (23.0, 68.0) | 9.6 | 9.6 |
| 9 | 雷达威胁 | (20.0, 38.0) | 10.0 | 10.0 |
| 10 | 雷达威胁 | (44.0, 19.0) | 8.0 | 8.0 |
| 11 | 雷达威胁 | (69.0, 24.0) | 8.0 | 8.0 |
| 12 | 防空导弹威胁 | (94.0, 27.0) | 7.0 | 10.0 |
| 13 | 防空导弹威胁 | (92.0, 46.0) | 7.0 | 10.0 |
| 14 | 防空导弹威胁 | (78.0, 75.0) | 7.0 | 8.0 |
| 15 | 防空导弹威胁 | (36.0, 80.0) | 7.0 | 9.0 |
| 16 | 防空导弹威胁 | (25.0, 16.0) | 7.0 | 9.0 |
| 17 | 防空导弹威胁 | (92.0, 85.0) | 7.0 | 7.0 |
| 18 | 气候威胁 | (38.0, 38.0) | 30.0 | 6.0 |
| 19 | 气候威胁 | (71.0, 38.0) | 30.0 | 8.0 |
| 20 | 气候威胁 | (58.0, 69.0) | 30.0 | 6.0 |
| 21 | 气候威胁 | (20.0, 85.0) | 30.0 | 6.0 |
| 22 | 气候威胁 | (40.0, 66.0) | 30.0 | 6.0 |
| 23 | 气候威胁 | (90.0, 68.0) | 30.0 | 6.0 |
Table 1 Environment threat parameters
| 编号 | 威胁 种类 | 威胁二维中心 坐标/km | 最大威胁 高度/km | 最大威胁 半径/km |
|---|---|---|---|---|
| 1 | 山峰威胁 | (45.0, 72.0) | 3.0 | 15.0 |
| 2 | 山峰威胁 | (67.0, 40.0) | 1.5 | 10.0 |
| 3 | 山峰威胁 | (31.0, 28.0) | 2.0 | 10.0 |
| 4 | 山峰威胁 | (88.0, 26.0) | 2.5 | 12.0 |
| 5 | 雷达威胁 | (60.0, 52.0) | 12.0 | 12.0 |
| 6 | 雷达威胁 | (81.0, 55.0) | 8.0 | 8.0 |
| 7 | 雷达威胁 | (57.0, 86.0) | 10.0 | 10.0 |
| 8 | 雷达威胁 | (23.0, 68.0) | 9.6 | 9.6 |
| 9 | 雷达威胁 | (20.0, 38.0) | 10.0 | 10.0 |
| 10 | 雷达威胁 | (44.0, 19.0) | 8.0 | 8.0 |
| 11 | 雷达威胁 | (69.0, 24.0) | 8.0 | 8.0 |
| 12 | 防空导弹威胁 | (94.0, 27.0) | 7.0 | 10.0 |
| 13 | 防空导弹威胁 | (92.0, 46.0) | 7.0 | 10.0 |
| 14 | 防空导弹威胁 | (78.0, 75.0) | 7.0 | 8.0 |
| 15 | 防空导弹威胁 | (36.0, 80.0) | 7.0 | 9.0 |
| 16 | 防空导弹威胁 | (25.0, 16.0) | 7.0 | 9.0 |
| 17 | 防空导弹威胁 | (92.0, 85.0) | 7.0 | 7.0 |
| 18 | 气候威胁 | (38.0, 38.0) | 30.0 | 6.0 |
| 19 | 气候威胁 | (71.0, 38.0) | 30.0 | 8.0 |
| 20 | 气候威胁 | (58.0, 69.0) | 30.0 | 6.0 |
| 21 | 气候威胁 | (20.0, 85.0) | 30.0 | 6.0 |
| 22 | 气候威胁 | (40.0, 66.0) | 30.0 | 6.0 |
| 23 | 气候威胁 | (90.0, 68.0) | 30.0 | 6.0 |
| 序号 | 算法 | 改进 |
|---|---|---|
| 1 | 传统SAS算法 | |
| 2 | I-SAS算法 | 添加“飞行扩展节点改进模型” |
| 3 | IT-SAS算法 | 添加“飞行扩展节点改进模型”+“并发扩展结构”+“时间协同代价计算模型” |
| 4 | IS-SAS算法 | 添加“飞行扩展节点改进模型”+“并发扩展结构”+“多机防碰撞约束模型” |
| 5 | T/S-SAS算法 | 添加“飞行扩展节点改进模型”+“并发扩展结构”+“时间协同代价计算模型”+“多机防碰撞约束模型” |
Table 2 Related algorithm name and algorithm improvement description
| 序号 | 算法 | 改进 |
|---|---|---|
| 1 | 传统SAS算法 | |
| 2 | I-SAS算法 | 添加“飞行扩展节点改进模型” |
| 3 | IT-SAS算法 | 添加“飞行扩展节点改进模型”+“并发扩展结构”+“时间协同代价计算模型” |
| 4 | IS-SAS算法 | 添加“飞行扩展节点改进模型”+“并发扩展结构”+“多机防碰撞约束模型” |
| 5 | T/S-SAS算法 | 添加“飞行扩展节点改进模型”+“并发扩展结构”+“时间协同代价计算模型”+“多机防碰撞约束模型” |
| 无人机编号 | 起始点坐标/km | 设定目标点坐标/km |
|---|---|---|
| U1 | (20.0, 0, 1.0) | (20.0, 100.0, 1.0) |
| U2 | (40.0, 0, 1.0) | (40.0, 100.0, 1.0) |
| U3 | (60.0, 0, 1.0) | (60.0, 100.0, 1.0) |
| U4 | (80.0, 0, 1.0) | (80.0, 100.0, 1.0) |
Table 3 Starting point and target point parameters of algorithm planning efficiency test
| 无人机编号 | 起始点坐标/km | 设定目标点坐标/km |
|---|---|---|
| U1 | (20.0, 0, 1.0) | (20.0, 100.0, 1.0) |
| U2 | (40.0, 0, 1.0) | (40.0, 100.0, 1.0) |
| U3 | (60.0, 0, 1.0) | (60.0, 100.0, 1.0) |
| U4 | (80.0, 0, 1.0) | (80.0, 100.0, 1.0) |

Fig.10 Planning result comparison of traditional SAS algorithm and I-SAS algorithm
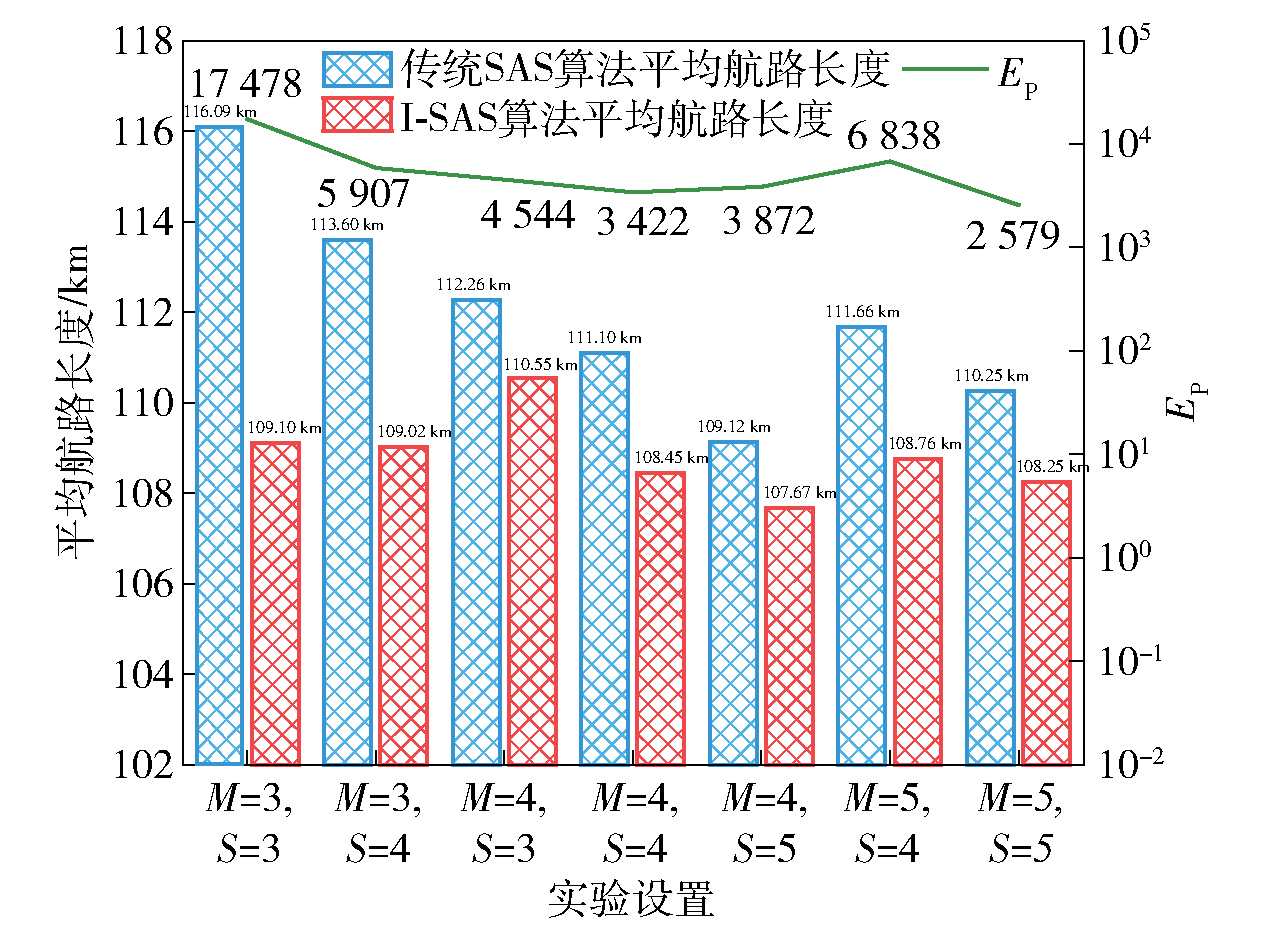
Fig.11 Data comparison between traditional SAS algorithm and I-SAS algorithm under different number of expanded nodes
| 无人机 编号 | 起始点 坐标/km | 目标 编号 | 设定目标点 坐标/km | |
|---|---|---|---|---|
| U1 | (20.0, 0, 1.0) | T1 | (20.0, 100.0, 1.0) | |
| U2 | (40.0, 0, 1.0) | T2 | (40.0, 100.0, 1.0) | |
| U3 | (60.0, 0, 1.0) | T3 | (60.0, 100.0, 1.0) | |
| U4 | (80.0, 0, 1.0) | T4 | (80.0, 100.0, 1.0) |
Table 4 Starting point and target point parameters of time coordination test
| 无人机 编号 | 起始点 坐标/km | 目标 编号 | 设定目标点 坐标/km | |
|---|---|---|---|---|
| U1 | (20.0, 0, 1.0) | T1 | (20.0, 100.0, 1.0) | |
| U2 | (40.0, 0, 1.0) | T2 | (40.0, 100.0, 1.0) | |
| U3 | (60.0, 0, 1.0) | T3 | (60.0, 100.0, 1.0) | |
| U4 | (80.0, 0, 1.0) | T4 | (80.0, 100.0, 1.0) |

Fig.12 Planning result comparison of I-SAS algorithm and IT-SAS algorithm
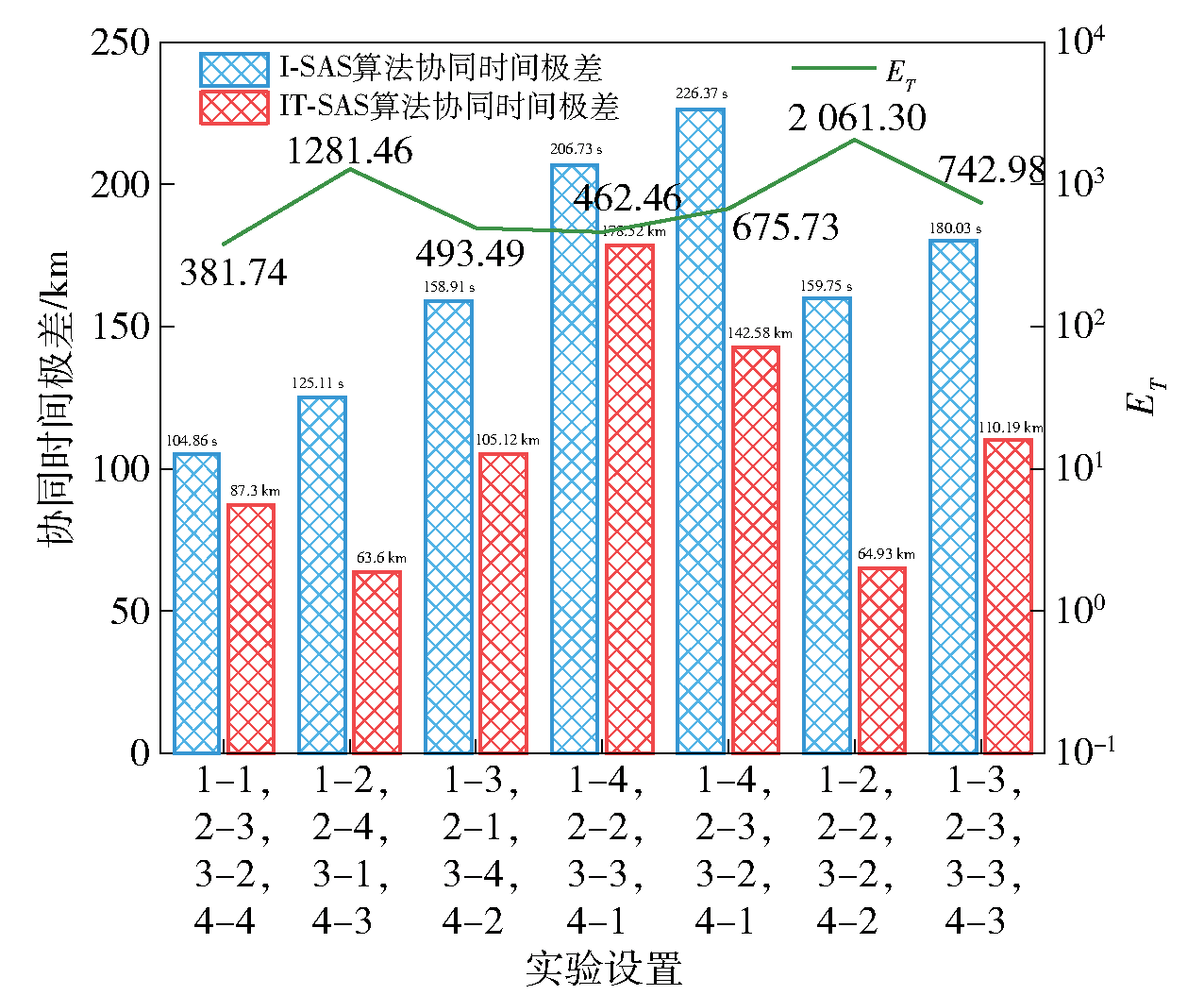
Fig.13 Data comparison between I-SAS algorithm and IT-SAS algorithm under different target location settings
| 无人机编号 | 起始点坐标/km | 设定目标点坐标/km |
|---|---|---|
| U1 | (0.5, 0, 1.0) | (100.0, 100.0, 1.0) |
| U2 | (1.0, 0, 1.0) | (100.0, 100.0, 1.0) |
| U3 | (0, 0.5, 1.0) | (100.0, 100.0, 1.0) |
| U4 | (0, 1.0, 1.0) | (100.0, 100.0, 1.0) |
Table 5 Starting point and target point parameters of space coordination test
| 无人机编号 | 起始点坐标/km | 设定目标点坐标/km |
|---|---|---|
| U1 | (0.5, 0, 1.0) | (100.0, 100.0, 1.0) |
| U2 | (1.0, 0, 1.0) | (100.0, 100.0, 1.0) |
| U3 | (0, 0.5, 1.0) | (100.0, 100.0, 1.0) |
| U4 | (0, 1.0, 1.0) | (100.0, 100.0, 1.0) |

Fig.14 Planning result comparison of I-SAS algorithm and IS-SAS algorithm
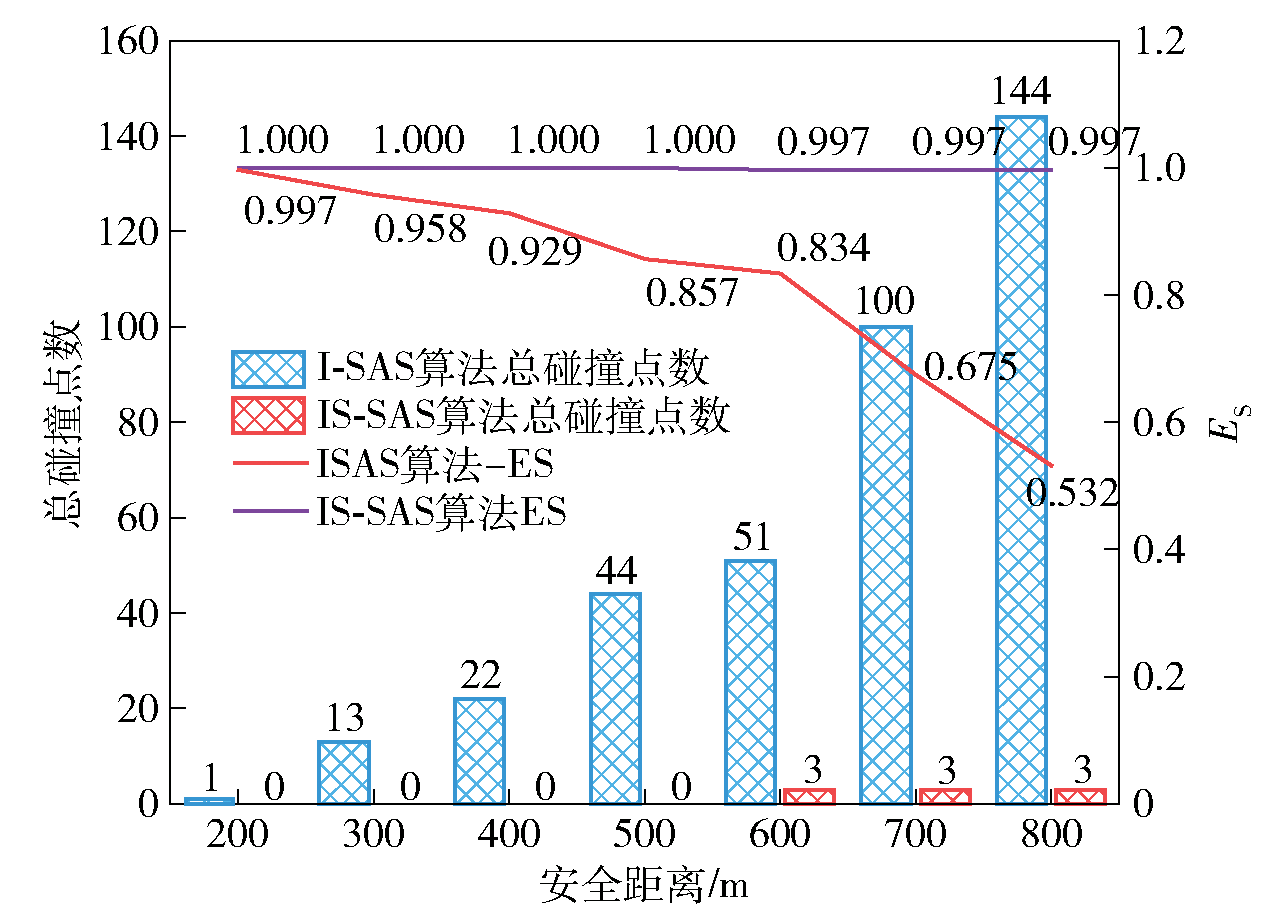
Fig.15 Data comparison between I-SAS algorithm and IS-SAS algorithm under different safety distances
| 无人机编号 | 起始点坐标/km | 设定目标点坐标/km |
|---|---|---|
| U1 | (1.0, 0, 1.0) | (100.0, 100.0, 1.0) |
| U2 | (2.0, 0, 1.0) | (100.0, 100.0, 1.0) |
| U3 | (0, 1.0, 1.0) | (100.0, 100.0, 1.0) |
| U4 | (0, 2.0, 1.0) | (100.0, 100.0, 1.0) |
Table 6 Starting point and target point parameters of time/space coordination test
| 无人机编号 | 起始点坐标/km | 设定目标点坐标/km |
|---|---|---|
| U1 | (1.0, 0, 1.0) | (100.0, 100.0, 1.0) |
| U2 | (2.0, 0, 1.0) | (100.0, 100.0, 1.0) |
| U3 | (0, 1.0, 1.0) | (100.0, 100.0, 1.0) |
| U4 | (0, 2.0, 1.0) | (100.0, 100.0, 1.0) |
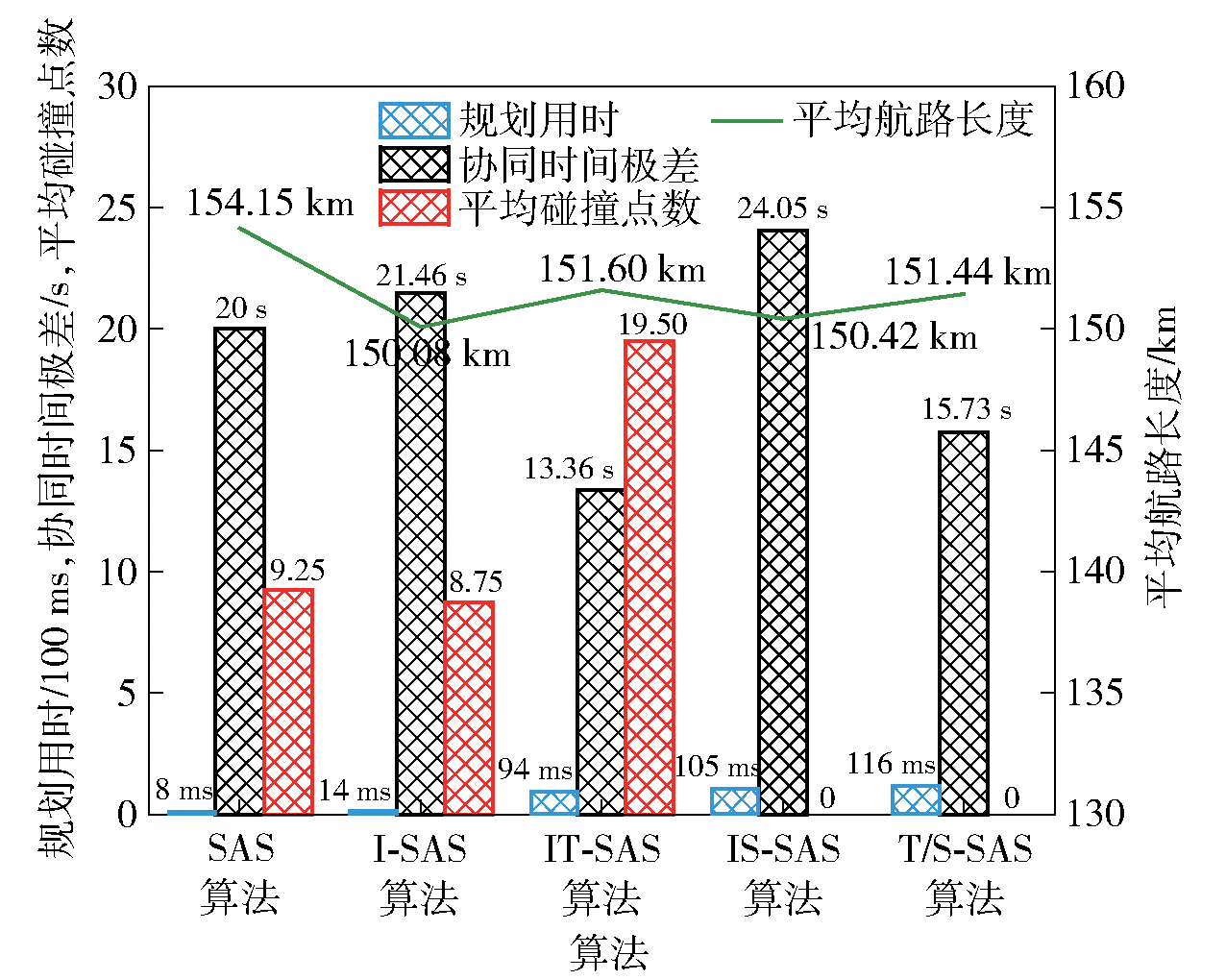
Fig.16 Planning result comparison of different algorithms
| [1] |
尤嵩菀, 王文龙. 美俄军事智能化发展及启示[J]. 海军工程大学学报(综合版), 2020, 17(2): 64-69.
|
|
|
|
| [2] |
|
| [3] |
孙健, 井立, 刘朝君. 突发威胁下的无人机航迹规划算法[J]. 飞行力学, 2018, 36(3): 52-55.
|
|
|
|
| [4] |
doi: 10.4173/mic.2017.1.3 URL |
| [5] |
代进进, 李相民, 薄宁, 等. 基于模型预测控制的无人机避障路径规划方法[J]. 火力与指挥控制, 2020, 45(1): 114-119.
|
|
|
|
| [6] |
王文彬, 秦小林, 张力戈, 等. 基于滚动时域的无人机动态航迹规划[J]. 智能系统学报, 2018, 13(4): 524-533.
|
|
|
|
| [7] |
doi: 10.1109/TVT.25 URL |
| [8] |
doi: 10.3390/app10165613 URL |
| [9] |
朱杰, 鲁艺, 张辉明. 突发威胁情况下的无人机航迹重规划[J]. 计算机工程与应用, 2018, 54(8): 255-259.
doi: 10.3778/j.issn.1002-8331.1709-0345 |
|
|
|
| [10] |
吴云华, 牛康, 李磊, 等. 基于3D-APF和约束动力学的无人机编队飞行控制[J]. 系统工程与电子技术, 2018, 40(5): 1104-1108.
|
|
|
|
| [11] |
陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3): 651-658.
doi: 10.3969/j.issn.1000-1093.2019.03.025 |
|
doi: 10.3969/j.issn.1000-1093.2019.03.025 |
|
| [12] |
潘无为, 姜大鹏, 庞永杰, 等. 人工势场和虚拟结构相结合的多水下机器人编队控制[J]. 兵工学报, 2017, 38(2): 326-334.
doi: 10.3969/j.issn.1000-1093.2017.02.017 |
|
|
|
| [13] |
梁宵, 王宏伦, 李大伟, 等. 基于流水避石原理的无人机三维航路规划方法[J]. 航空学报, 2013, 34(7): 1670-1681.
|
|
|
|
| [14] |
王宏伦, 吴健发, 姚鹏. 基于扰动流体动态系统的无人机三维航路规划:方法与应用[J]. 无人系统技术, 2018, 1(1): 72-82.
|
|
|
|
| [15] |
|
| [16] |
高升, 艾剑良, 王之豪. 混合种群RRT无人机航迹规划方法[J]. 系统工程与电子技术, 2020, 42(1): 101-107.
doi: 10.3969/j.issn.1001-506X.2020.01.14 |
|
|
|
| [17] |
王生印, 龙腾, 王祝, 等. 基于即时修复式稀疏A*算法的动态航迹规划[J]. 系统工程与电子技术, 2018, 40(12): 2714-2721.
|
|
|
|
| [18] |
张韬, 项祺, 郑婉文, 等. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4): 960-968.
doi: 10.12382/bgxb.2021.0209 |
|
|
|
| [19] |
doi: 10.1016/j.ast.2019.06.027 URL |
| [20] |
李文博, 秦小林, 罗刚. 基于无障碍凸区域的无人机在线航迹规划[J]. 系统科学与数学, 2021, 41(6): 1493-1506.
|
|
doi: 10.12341/jssms20355 |
|
| [21] |
|
| [22] |
doi: 10.1177/09544100211007381 URL |
| [23] |
doi: 10.1109/Access.6287639 URL |
| [24] |
|
| [1] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [2] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||