
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (6): 1564-1575.doi: 10.12382/bgxb.2022.0095
Previous Articles Next Articles
FAN Boyang, ZHAO Gaopeng*( ), BO Yuming, WU Xiang
), BO Yuming, WU Xiang
Received:2022-02-19
Online:2023-06-30
Contact:
ZHAO Gaopeng
FAN Boyang, ZHAO Gaopeng, BO Yuming, WU Xiang. Collaborative Task Allocation Method for Multi-Target Air-Ground Heterogeneous Unmanned System[J]. Acta Armamentarii, 2023, 44(6): 1564-1575.
Add to citation manager EndNote|Ris|BibTeX
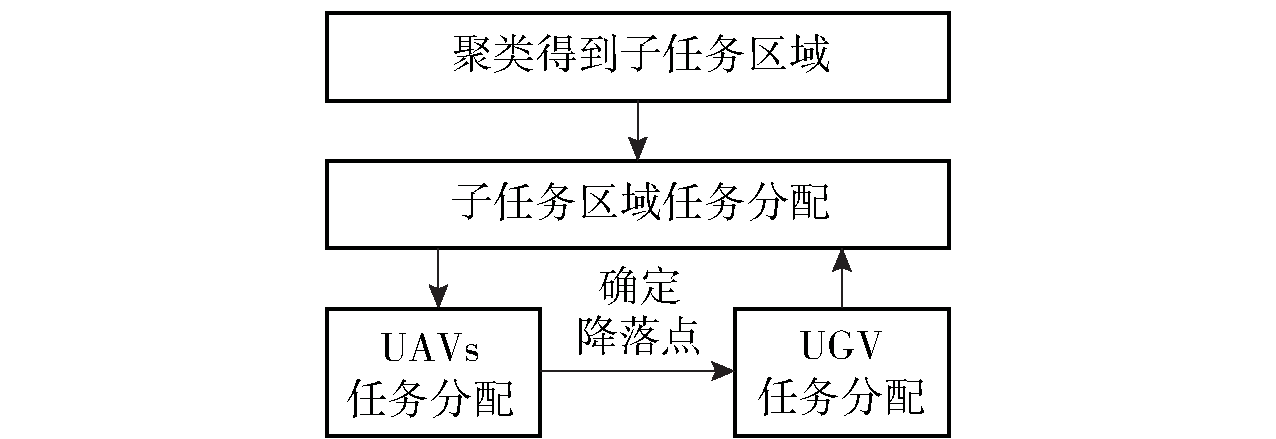
Fig.1 Main idea of this study
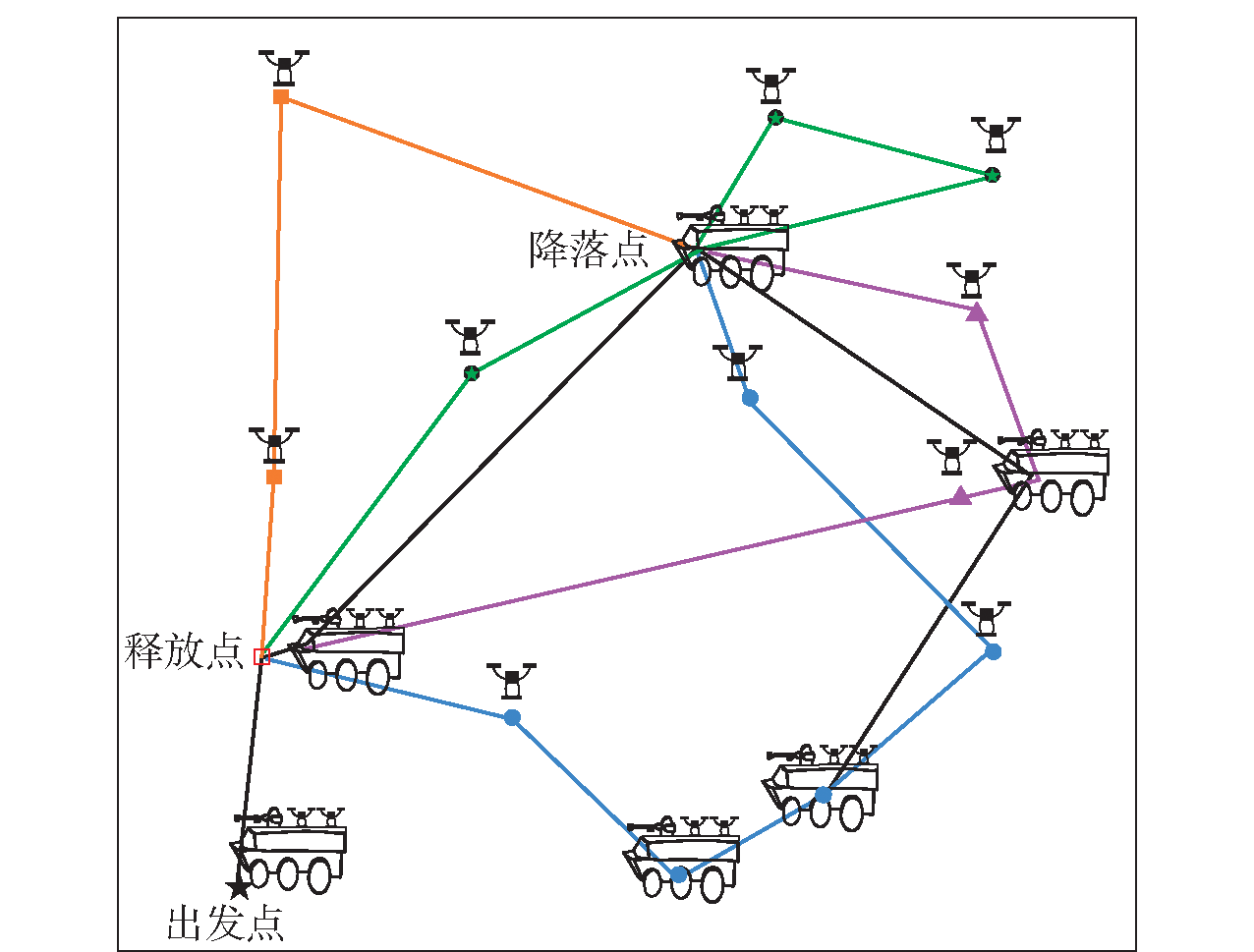
Fig.2 Schematic diagram of collaborative operation process of multi-target air-ground heterogeneous unmanned system
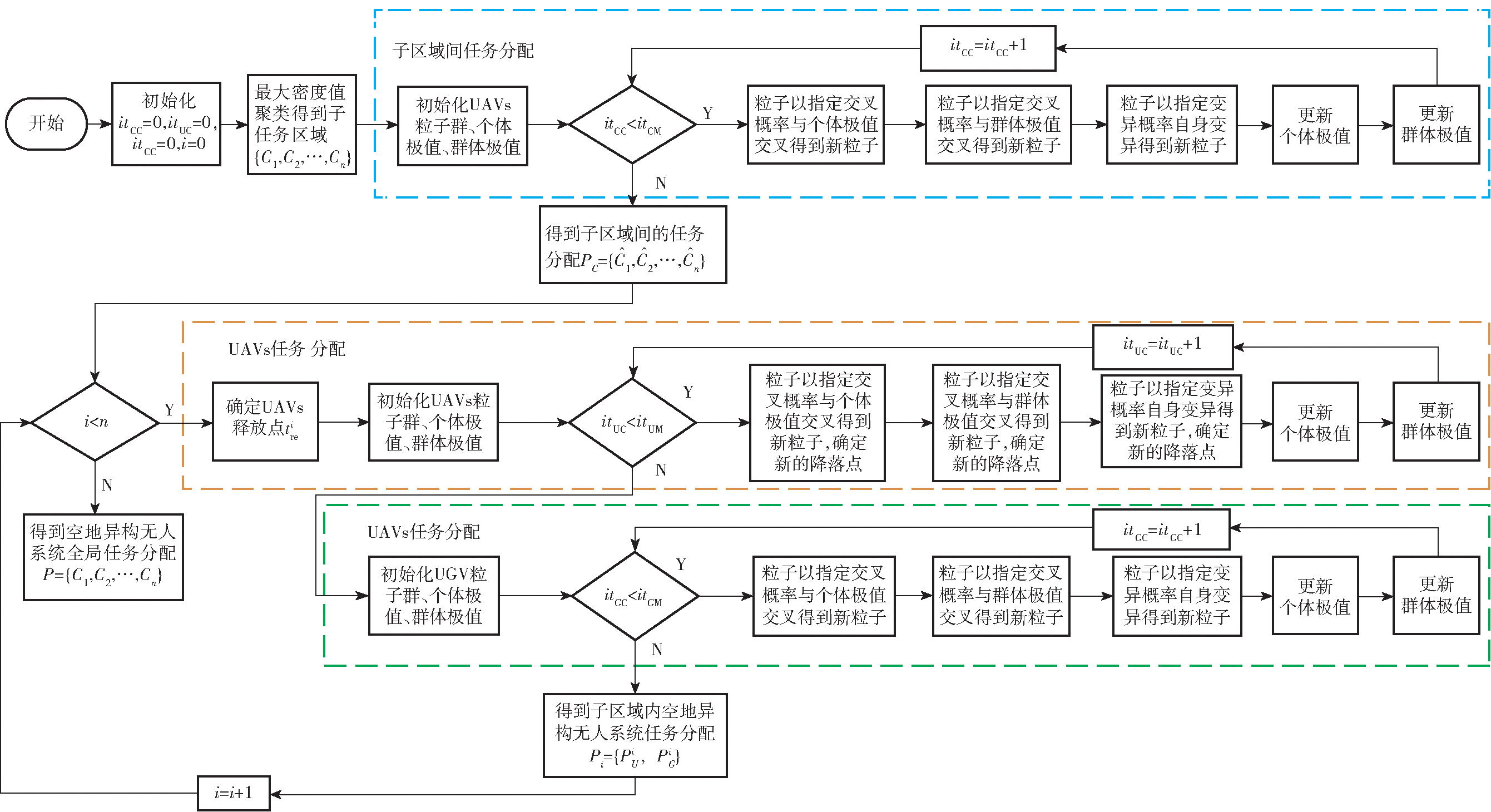
Fig.3 Process of the task allocation method for multi-target air-ground heterogeneous unmanned system
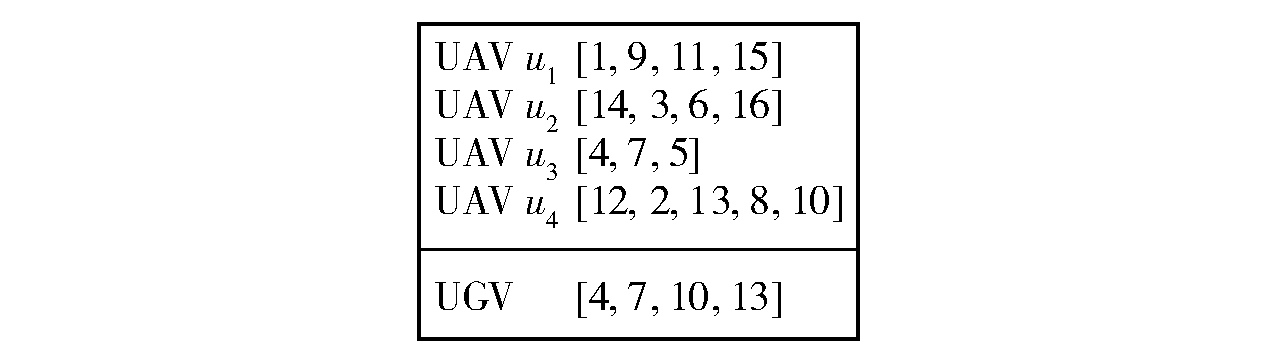
Fig.4 A sample of the particle code
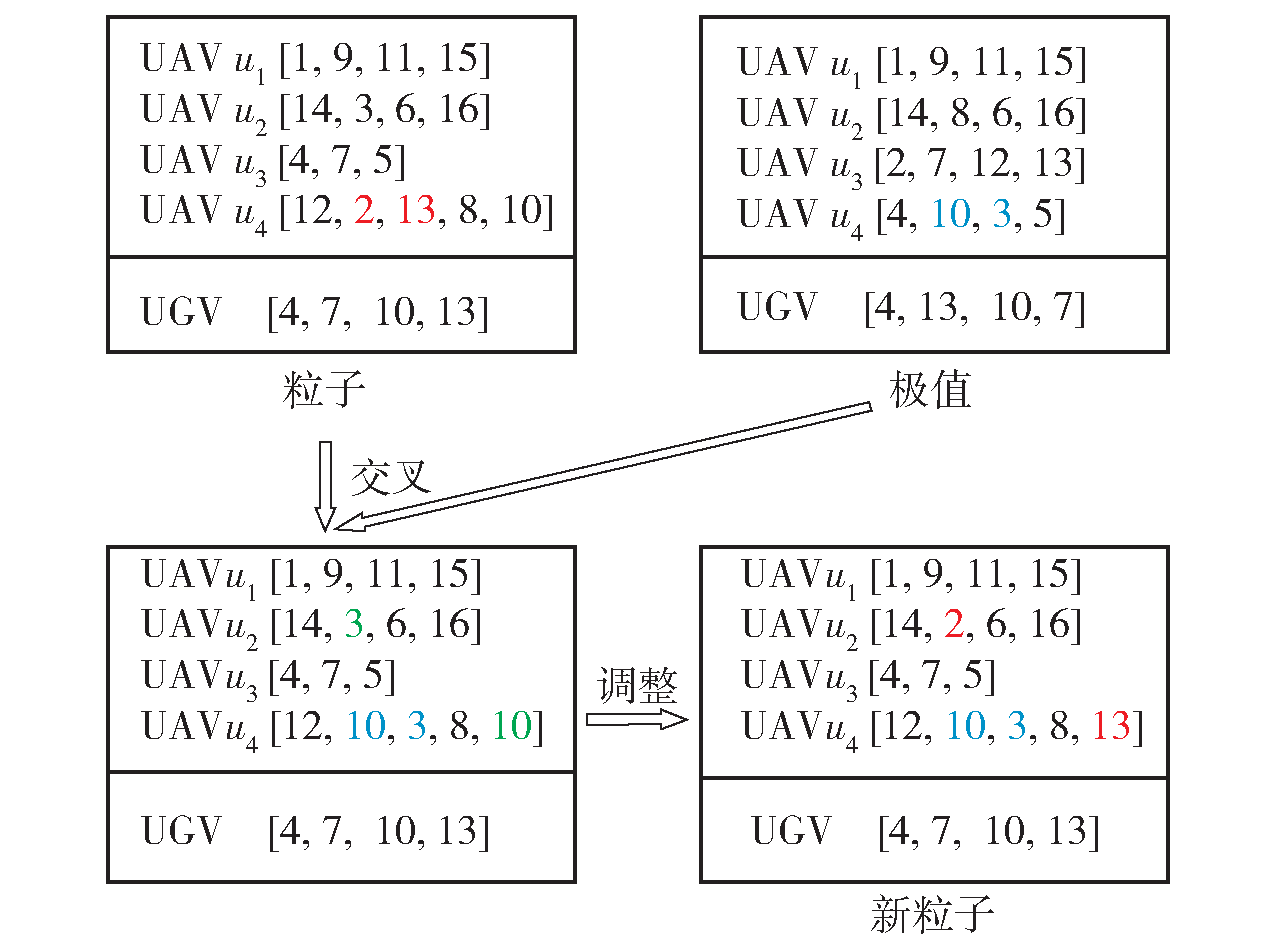
Fig.5 A sample of the crossover operation
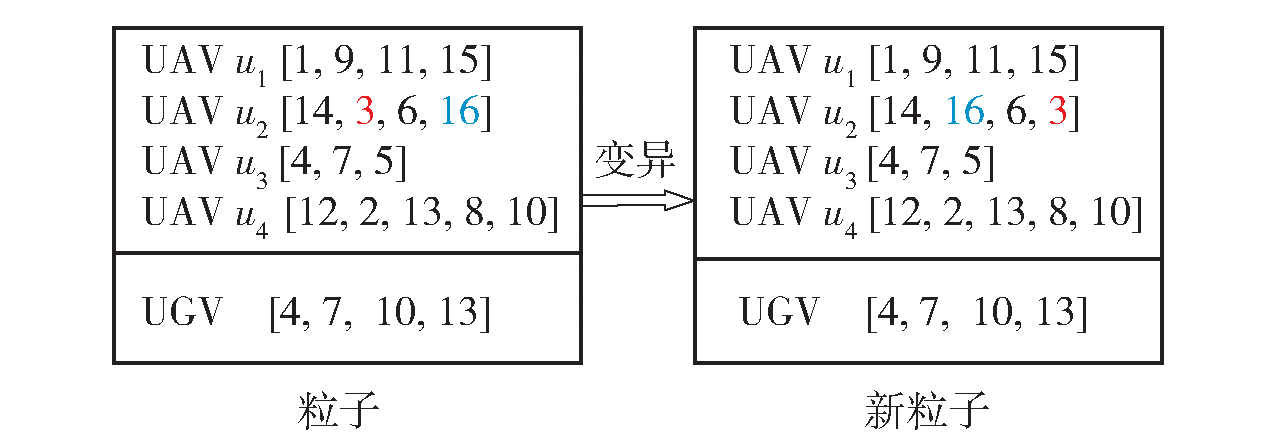
Fig.6 A sample of the mutation operation
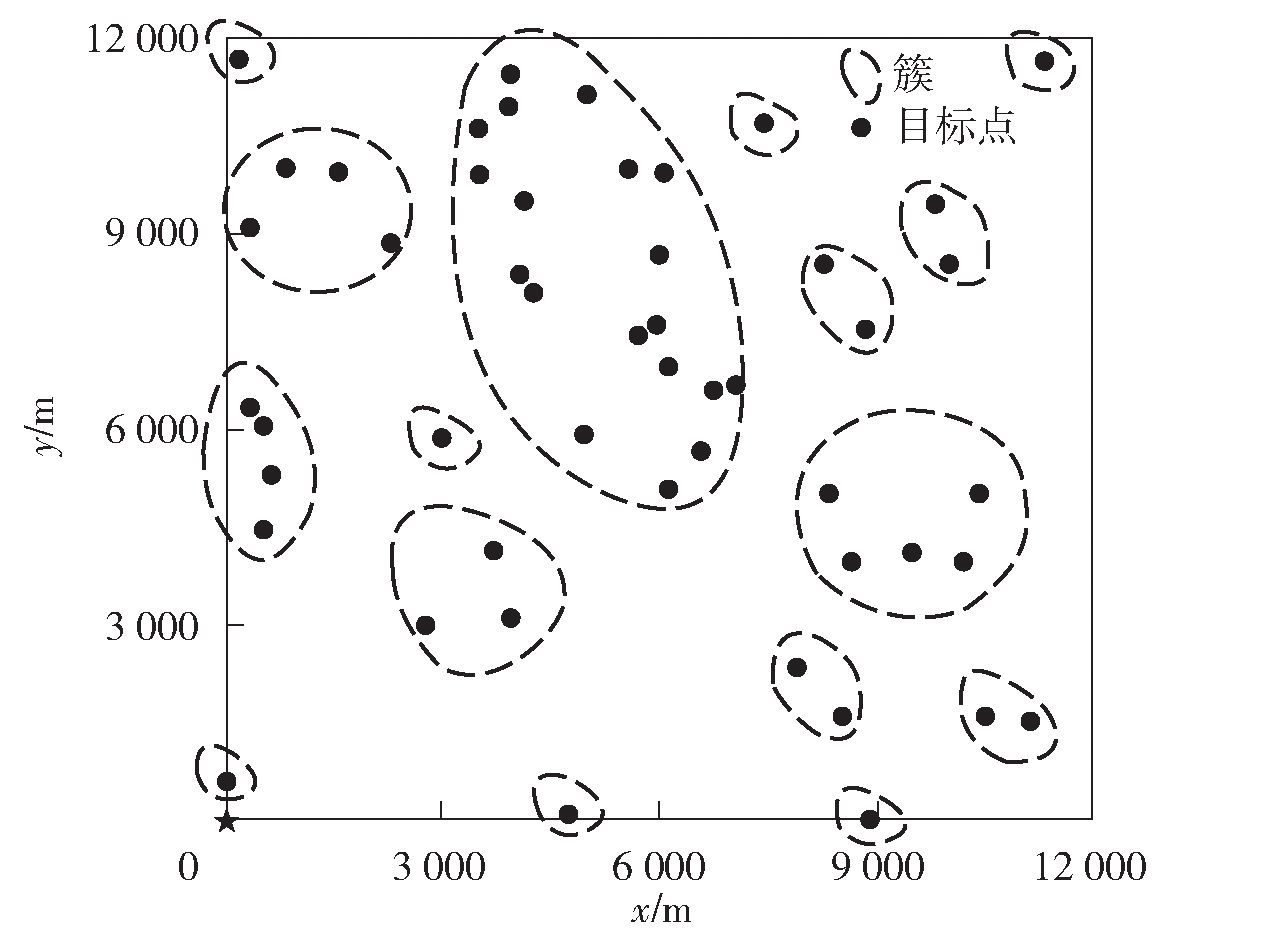
Fig.7 Result of density peak clustering
| 聚类算法 | 发现簇数量 | DBI值 |
|---|---|---|
| 密度值最大聚类 | 16 | 0.9281 |
| DBSCAN算法 | 16 | 1.0168 |
| k-means算法 | 16(手动设定) | 1.5859 |
Table 1 Comparison of clustering results in the range of 12000m×12000m
| 聚类算法 | 发现簇数量 | DBI值 |
|---|---|---|
| 密度值最大聚类 | 16 | 0.9281 |
| DBSCAN算法 | 16 | 1.0168 |
| k-means算法 | 16(手动设定) | 1.5859 |
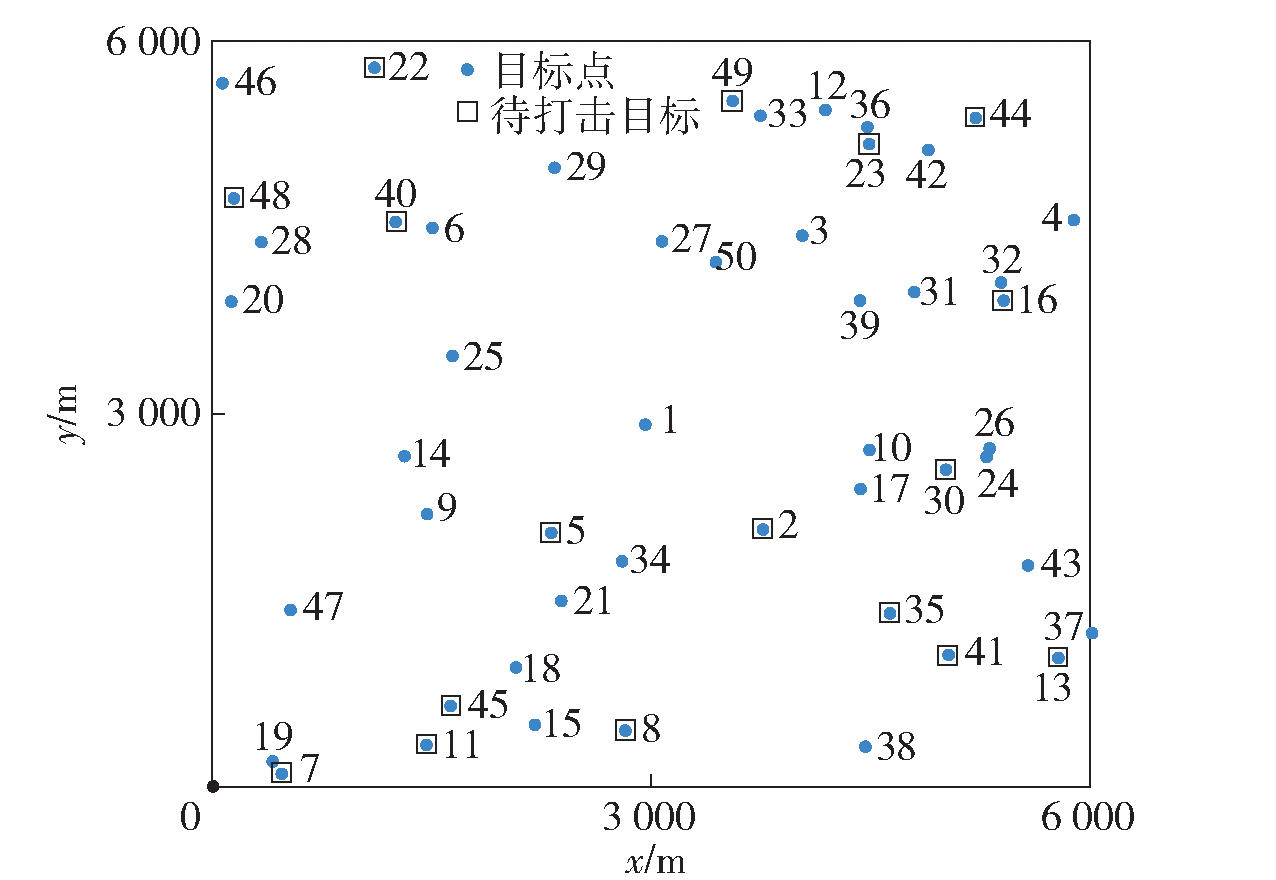
Fig.8 Target distribution map in the range of 6000m×6000m
| 算法 | 参数 | 数值 | 算法 | 参数 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 800 | 250 | |||
| 密度值最大聚类 | 密度阈值 | 5 | 混合粒子群优化 | 迭代次数 | 2400 | 800 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 |
Table 2 Parameters of thecollaborative task allocation method in the range of 6000m×6000m
| 算法 | 参数 | 数值 | 算法 | 参数 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 800 | 250 | |||
| 密度值最大聚类 | 密度阈值 | 5 | 混合粒子群优化 | 迭代次数 | 2400 | 800 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 |
| 无人系统 | 释放点 坐标/m | 任务序列 | 任务耗时/s | 降落点 | UGV抵达降 落点耗时/s |
|---|---|---|---|---|---|
| UAV1 | [7,38,10,4, 44,42, 23,36,12,33,49,29] | 1718.11 | |||
| UAV2 | [11,15,8,5,14,20,28,48,46,22] | 1340.85 | |||
| UAV3 | (365,106) | [47,9,21,34,1,39,31,16,32,3,50,27,40,6] | 1562.53 | 目标点[40] | 1335.49 |
| UAV4 | [19,45,18,17,30,26,24,43,37,13,41,35,2,25] | 1643.87 | |||
| UGV | [7,48,22,40,5,45,11,8,2,35,41,13,30,16,44,23,49] | 4323.73 |
Table 3 Collaborative task allocation in the range of 6000m×6000m
| 无人系统 | 释放点 坐标/m | 任务序列 | 任务耗时/s | 降落点 | UGV抵达降 落点耗时/s |
|---|---|---|---|---|---|
| UAV1 | [7,38,10,4, 44,42, 23,36,12,33,49,29] | 1718.11 | |||
| UAV2 | [11,15,8,5,14,20,28,48,46,22] | 1340.85 | |||
| UAV3 | (365,106) | [47,9,21,34,1,39,31,16,32,3,50,27,40,6] | 1562.53 | 目标点[40] | 1335.49 |
| UAV4 | [19,45,18,17,30,26,24,43,37,13,41,35,2,25] | 1643.87 | |||
| UGV | [7,48,22,40,5,45,11,8,2,35,41,13,30,16,44,23,49] | 4323.73 |
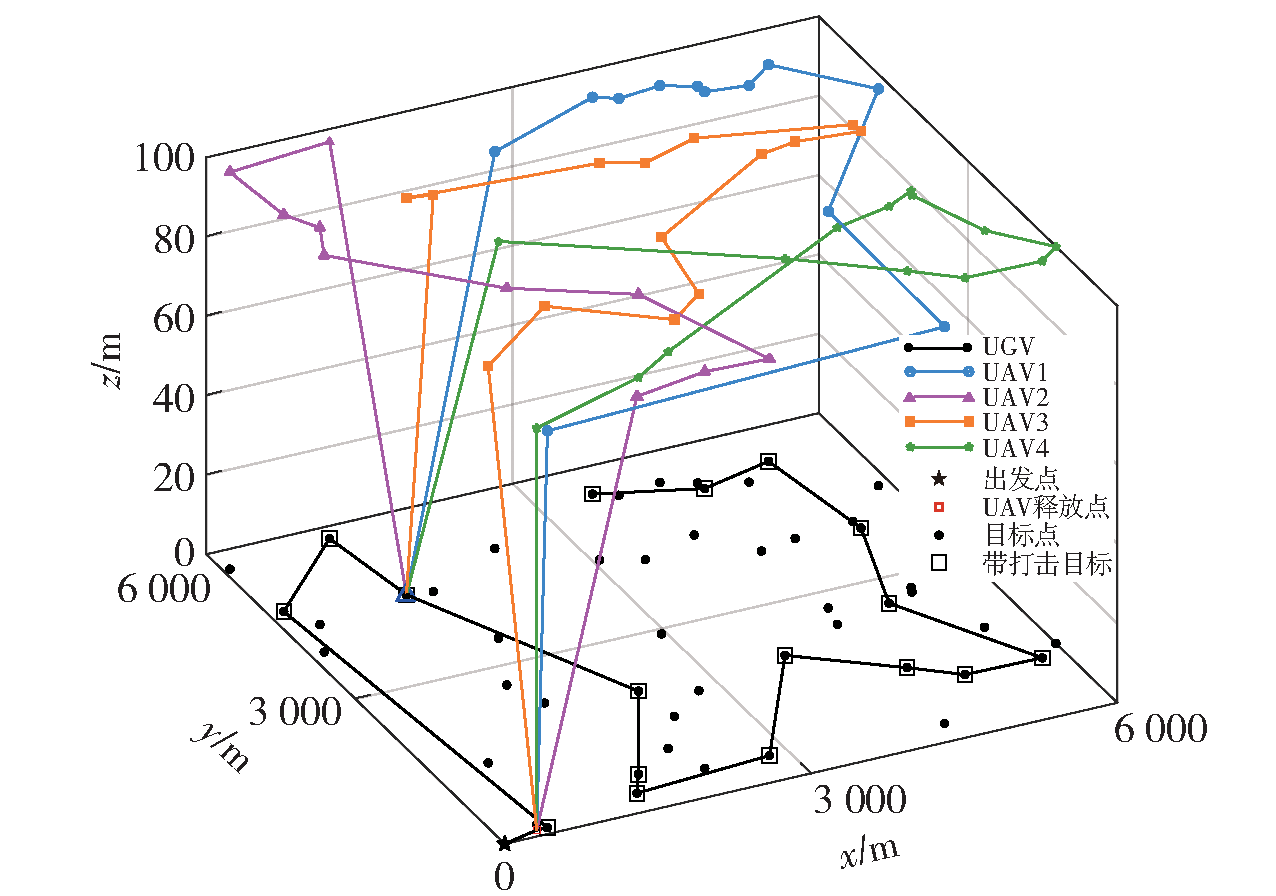
Fig.9 Schematic diagram of the collaborative taskallocation in the range of 6000m×6000m
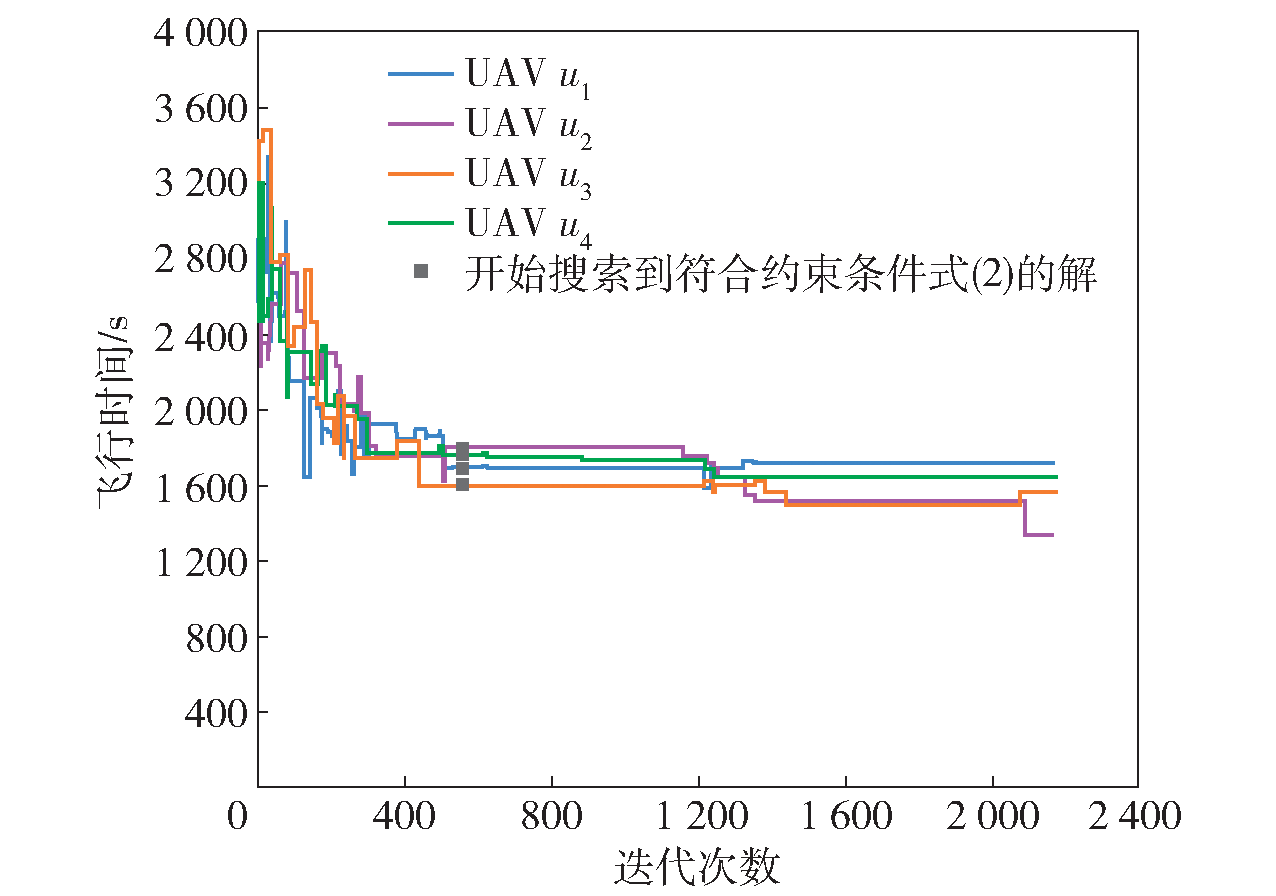
Fig.10 Flight time curves of UAVs
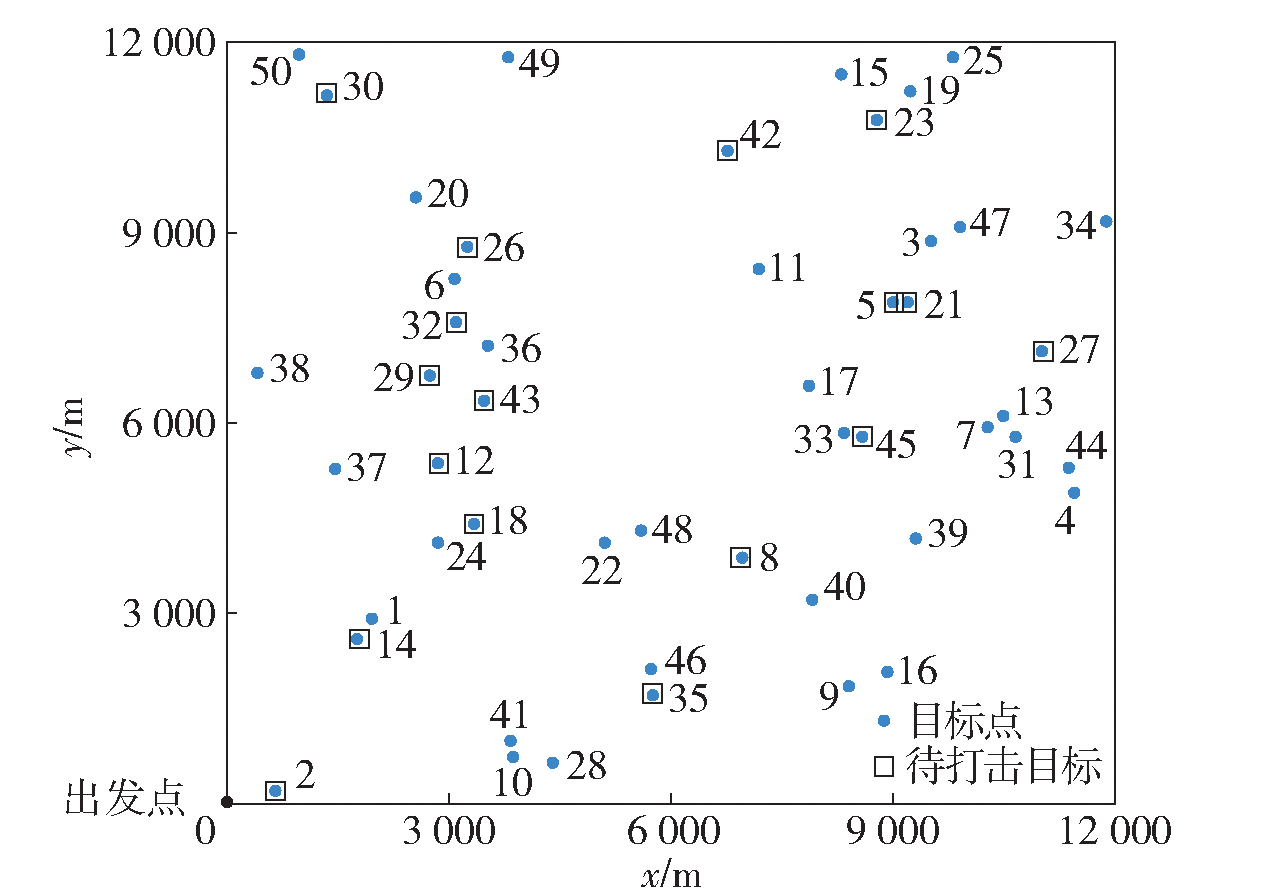
Fig.11 Target distribution map in the range of 12000m×12000m
| 参数 | UAV任务分配 | UGV任务分配 |
|---|---|---|
| 种群数量 | 800 | 250 |
| 迭代次数 | 2400 | 800 |
| 交叉概率 | 0.7 | 0.7 |
| 变异概率 | 0.7 | 0.7 |
Table 4 Parameters of the task allocation method without clustering in the range of 12000m×12000m
| 参数 | UAV任务分配 | UGV任务分配 |
|---|---|---|
| 种群数量 | 800 | 250 |
| 迭代次数 | 2400 | 800 |
| 交叉概率 | 0.7 | 0.7 |
| 变异概率 | 0.7 | 0.7 |
| 无人 系统 | 规划结果 | ||
|---|---|---|---|
| 释放点 坐标/m | 任务 序列 | 降落点 | |
| UAV1 | [14,37,38,30,50,49,20,26,6,36,17,33,45] | 目标点[5] | |
| UAV2 | (617,85) | [1,24,18,3,47,34,25,19,15,23] | |
| UAV3 | [41,35,46,8,40,9,16,39,4,44,31,7,13,27] | ||
| UAV4 | [2,10,28,48,22,12,43,29,32,42,11,5,21] | ||
Table 5 Task allocation result without clustering in the range of 12000m×12000m
| 无人 系统 | 规划结果 | ||
|---|---|---|---|
| 释放点 坐标/m | 任务 序列 | 降落点 | |
| UAV1 | [14,37,38,30,50,49,20,26,6,36,17,33,45] | 目标点[5] | |
| UAV2 | (617,85) | [1,24,18,3,47,34,25,19,15,23] | |
| UAV3 | [41,35,46,8,40,9,16,39,4,44,31,7,13,27] | ||
| UAV4 | [2,10,28,48,22,12,43,29,32,42,11,5,21] | ||
| 算法 | 参数 | 数值 | 算法 | 参数 | 子任务区域任务分配 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 240 | 240 | 50 | |||
| 密度值最大聚类算法 | 密度阈值 | 5 | 混合粒子群优化算法 | 迭代次数 | 720 | 720 | 200 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 | 0.7 |
Table 6 Parameters of the collaborative task allocation method in the range of 12000m×12000m
| 算法 | 参数 | 数值 | 算法 | 参数 | 子任务区域任务分配 | UAV任务分配 | UGV任务分配 | |
|---|---|---|---|---|---|---|---|---|
| 邻域半径/m | 1000 | 种群数量 | 240 | 240 | 50 | |||
| 密度值最大聚类算法 | 密度阈值 | 5 | 混合粒子群优化算法 | 迭代次数 | 720 | 720 | 200 | |
| 簇距离阈值/m | 1500 | 交叉概率 | 0.7 | 0.7 | 0.7 | |||
| 变异概率 | 0.7 | 0.7 | 0.7 |
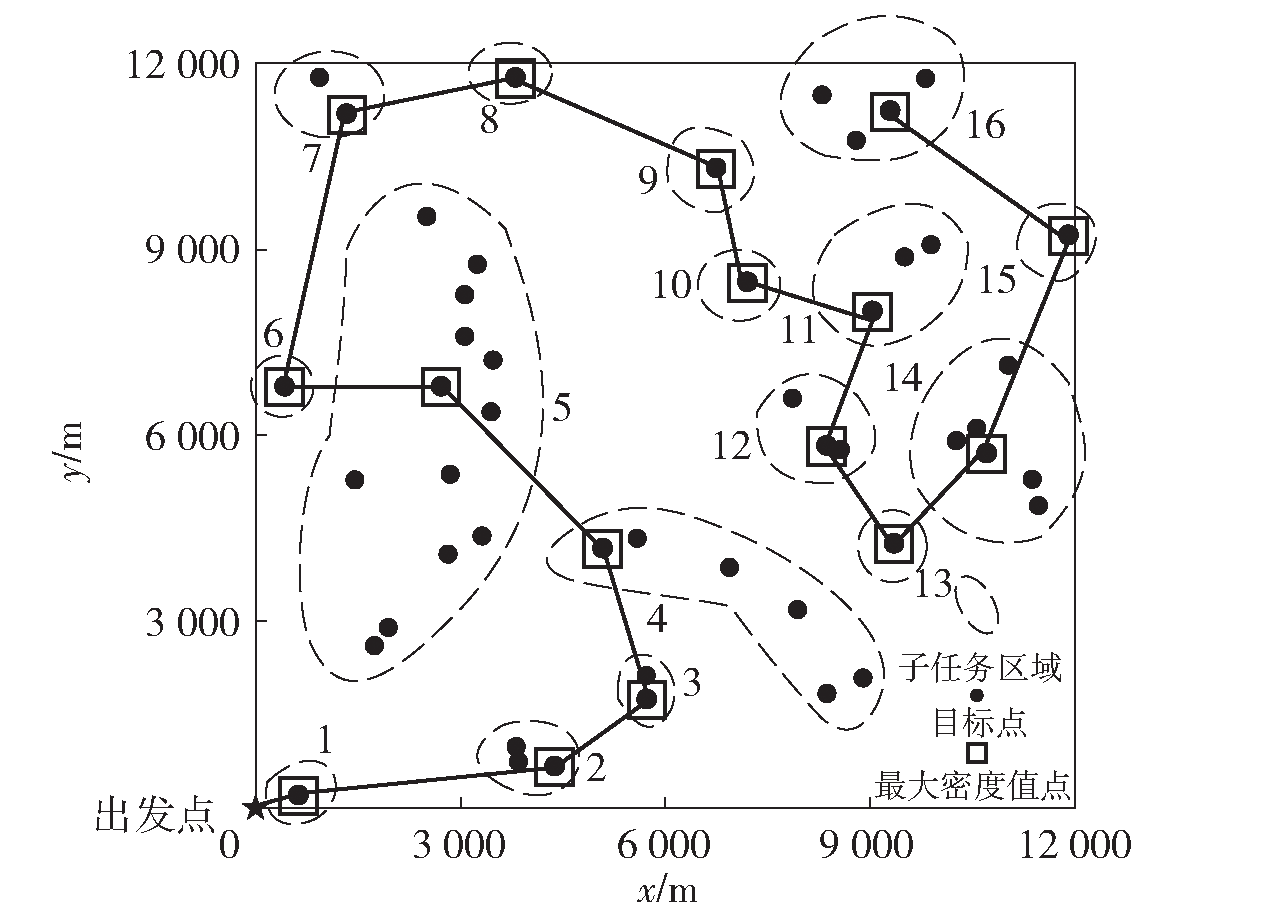
Fig.12 Clustering and task allocation
| |
Table 7 Collaborative task allocation for multi-target air-ground heterogeneous unmanned system in the range of 12000m×12000m
| |
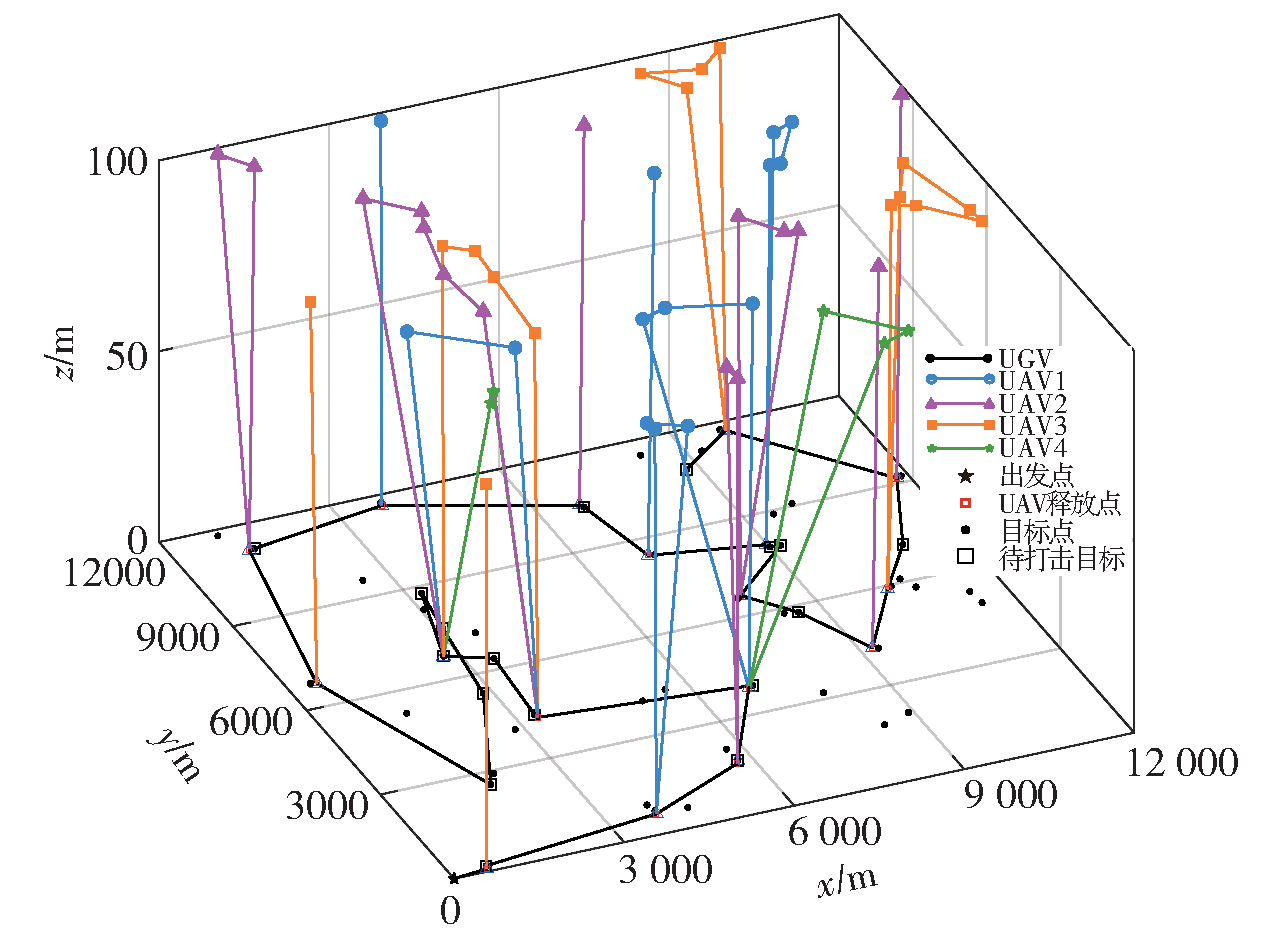
Fig.13 Schematic diagram of the collaborative task allocation for multi-target air-ground heterogeneous unmanned system in the range of 12000m×12000m
| [1] |
武文亮, 周兴社, 沈博, 等. 集群机器人系统特性评价研究综述[J]. 自动化学报, 2020, 46(13): 1-20.
|
|
|
|
| [2] |
doi: 10.1016/j.cja.2013.07.009 URL |
| [3] |
|
| [4] |
doi: 10.1016/j.ast.2018.05.039 URL |
| [5] |
|
| [6] |
doi: 10.1109/LRA.2021.3067286 URL |
| [7] |
|
| [8] |
张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.016 |
|
| [9] |
doi: 10.1016/j.trc.2015.03.005 URL |
| [10] |
doi: 10.1016/j.trc.2017.11.015 URL |
| [11] |
|
| [12] |
doi: 10.1109/TITS.2021.3066240 URL |
| [13] |
doi: 10.1109/LRA.2022.3148489 URL |
| [14] |
doi: 10.1007/s10514-018-9712-y |
| [15] |
doi: 10.1016/j.cor.2005.02.039 URL |
| [16] |
doi: 10.1016/j.cor.2010.06.001 URL |
| [17] |
doi: 10.1109/ACCESS.2021.3076919 URL |
| [18] |
doi: 10.1016/j.ast.2019.06.024 URL |
| [19] |
doi: 10.1016/j.jocs.2021.101545 URL |
| [20] |
王晶, 夏鲁宁, 荆继武. 一种基于密度最大值的聚类算法[J]. 中国科学院大学学报, 2009, 26(4): 539-548.
doi: 10.7523/j.issn.2095-6134.2009.4.016 |
|
doi: 10.7523/j.issn.2095-6134.2009.4.016 |
| [1] | MA Xiao, LI Xinqi, LIU Zhenyuan, DI Chao. A Fast Target Tracking Method Based on BACF [J]. Acta Armamentarii, 2024, 45(2): 497-503. |
| [2] | YAN Yuwen, BI Wenhao, ZHANG An, ZHANG Baichuan. Task Allocation Method of UAV Clusters Based on Sequence Generative Adversarial Network [J]. Acta Armamentarii, 2023, 44(9): 2672-2684. |
| [3] | CAO Yan, LONG Teng, SUN Jingliang, ZHOU Yuze. Distributed Task Allocation Algorithm for Multiple Unmanned Aerial Vehicle Based on Information Retransmission and Package Loss Compensation [J]. Acta Armamentarii, 2023, 44(9): 2697-2708. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||