
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (4): 960-971.doi: 10.12382/bgxb.2022.0009
Previous Articles Next Articles
LU Jiaxing, LIU Haiou*( ), GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong
), GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong
Received:2022-01-01
Online:2023-04-28
Contact:
LIU Haiou
LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization[J]. Acta Armamentarii, 2023, 44(4): 960-971.
Add to citation manager EndNote|Ris|BibTeX
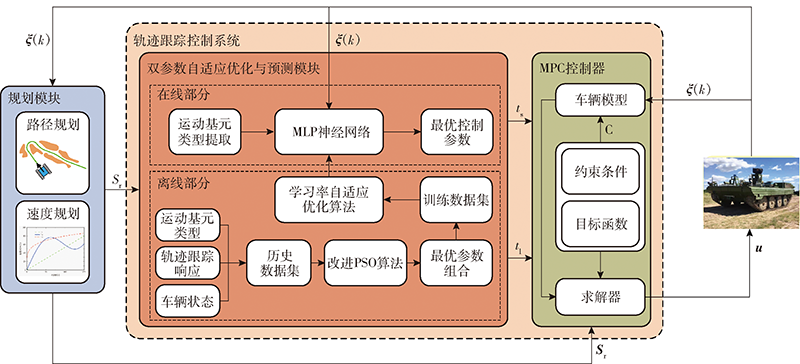
Fig.1 Overall framework
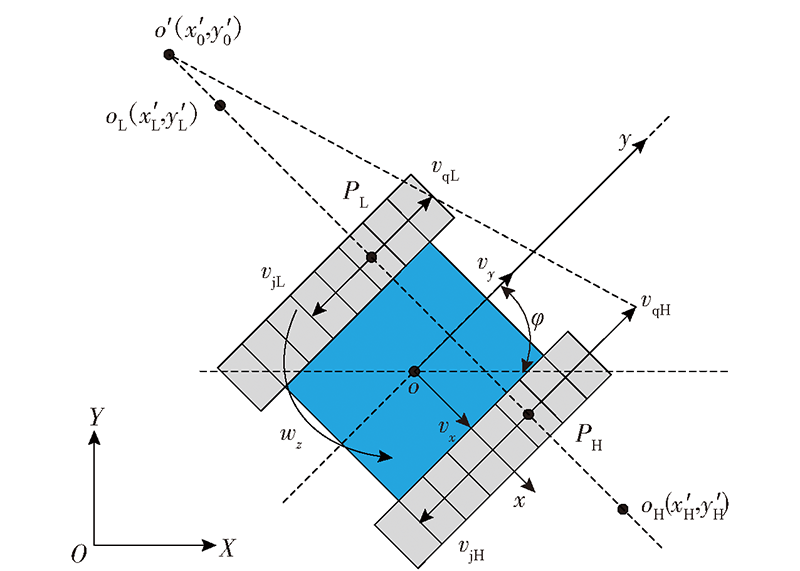
Fig.2 Kinematics model of a tracked vehicle
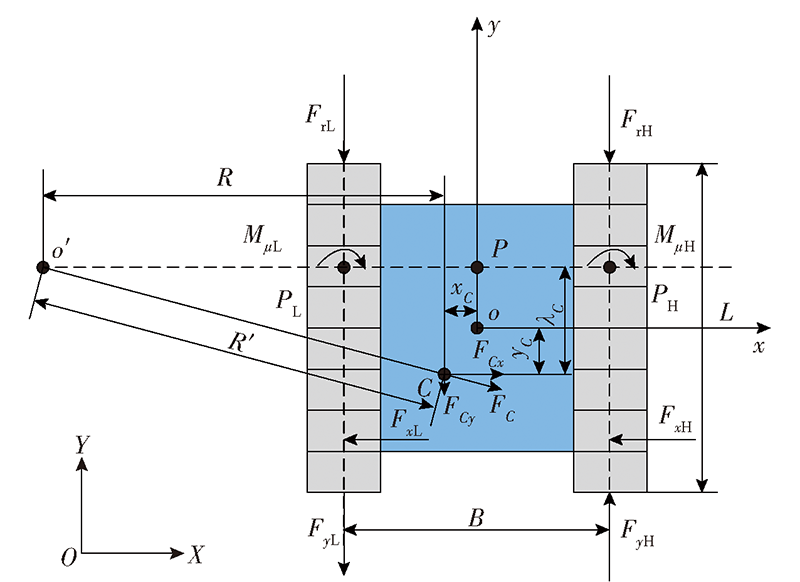
Fig.3 Dynamic model of a tracked vehicle
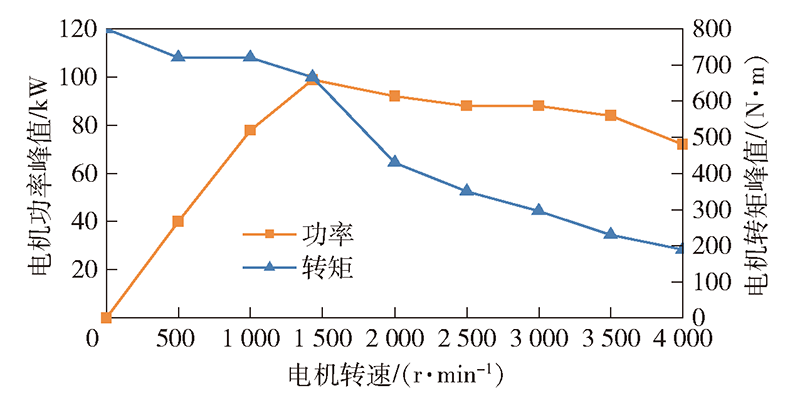
Fig.4 External characteristics of the motor
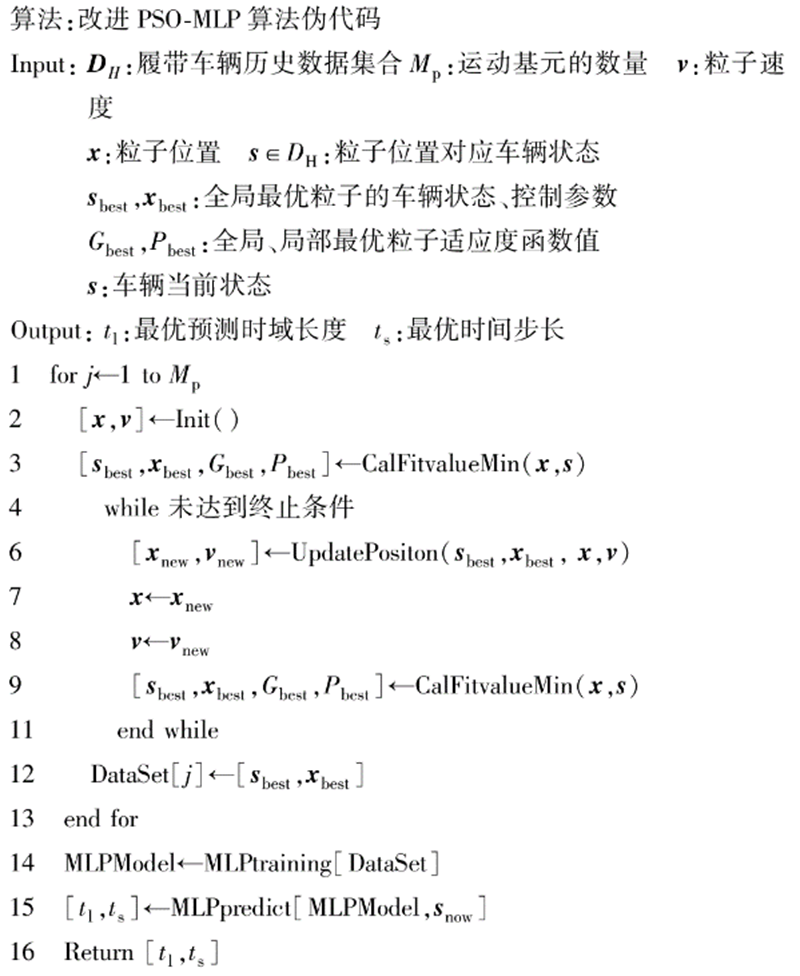
Fig.5 Pseudo codes of the improved PSO-MLP algorithm
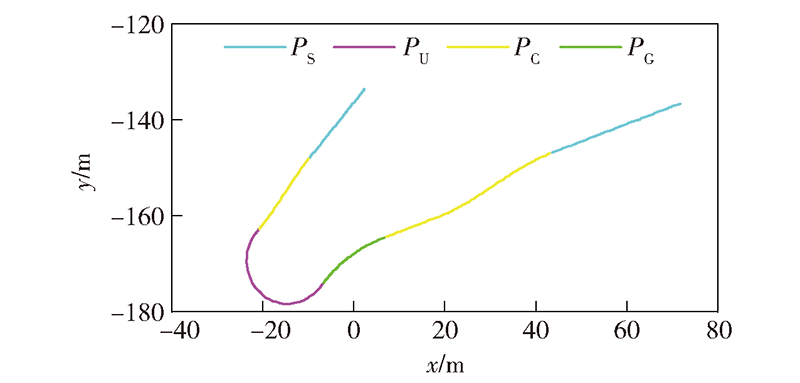
Fig.6 Diagram of the reference path
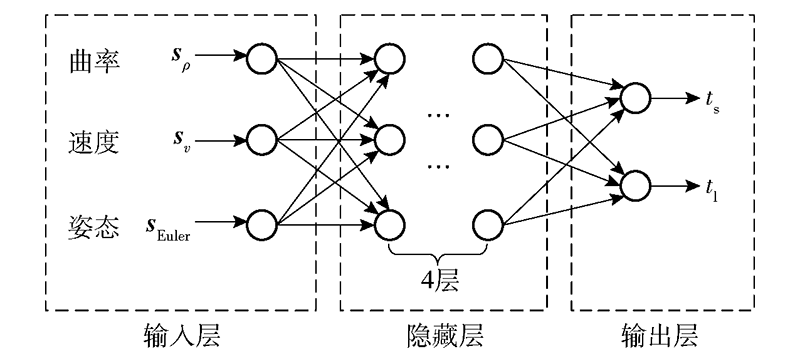
Fig.7 Schematic diagram of the MLP algorithm
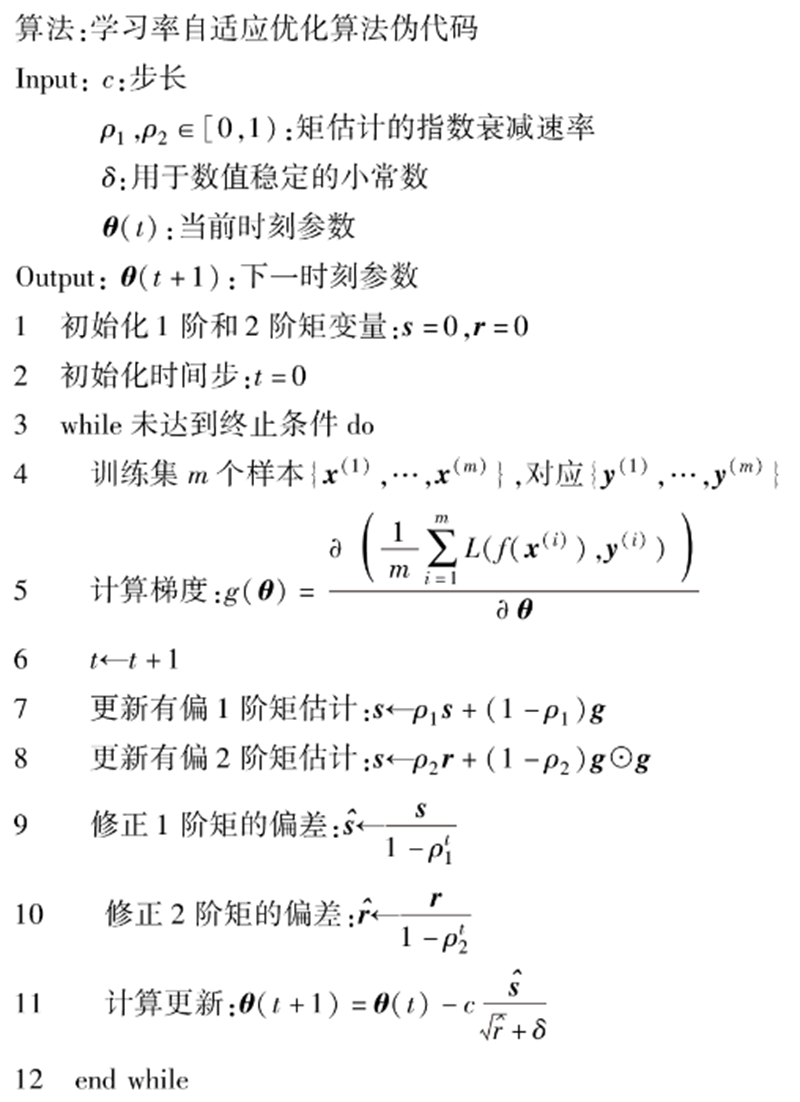
Fig.8 Adaptive learning rate optimization algorithm flow pseudo codes
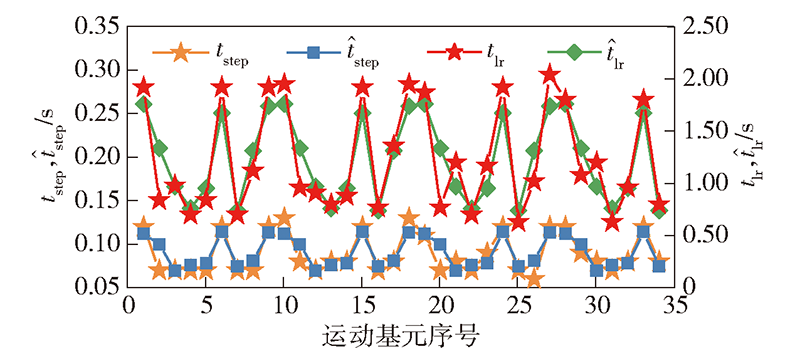
Fig.9 Prediction of the MLP neural network results
| 验证方式 | 参数 | 数值 |
|---|---|---|
| 质量/kg | 2000 | |
| 仿真 | 车长×车宽×车高/mm | 2616×1500×1260 |
| 履带中心距/mm | 1298 | |
| 主动轮半径/mm | 165 | |
| 质量/kg | 9360 | |
| 车长×车宽×车高/mm | 5476×2978×1800 | |
| 履带中心距/mm | 2464 | |
| 履带接地段长度/mm | 3095 | |
| 实车 | 主动轮半径/mm | 265.4 |
| 侧减速器传动比 | 5.5 | |
| 1挡/2挡传动比 | 2.708/1.0 | |
| 重心高度/mm | 850 | |
| 质量增加系数 | 1.446 | |
| 原地转向阻力系数 | 0.574 |
Table 1 Parameters of each platform
| 验证方式 | 参数 | 数值 |
|---|---|---|
| 质量/kg | 2000 | |
| 仿真 | 车长×车宽×车高/mm | 2616×1500×1260 |
| 履带中心距/mm | 1298 | |
| 主动轮半径/mm | 165 | |
| 质量/kg | 9360 | |
| 车长×车宽×车高/mm | 5476×2978×1800 | |
| 履带中心距/mm | 2464 | |
| 履带接地段长度/mm | 3095 | |
| 实车 | 主动轮半径/mm | 265.4 |
| 侧减速器传动比 | 5.5 | |
| 1挡/2挡传动比 | 2.708/1.0 | |
| 重心高度/mm | 850 | |
| 质量增加系数 | 1.446 | |
| 原地转向阻力系数 | 0.574 |
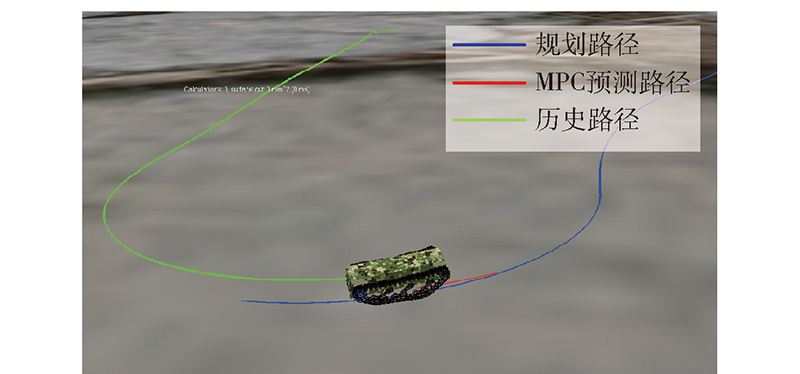
Fig.10 ROS-VREP co-simulation environment
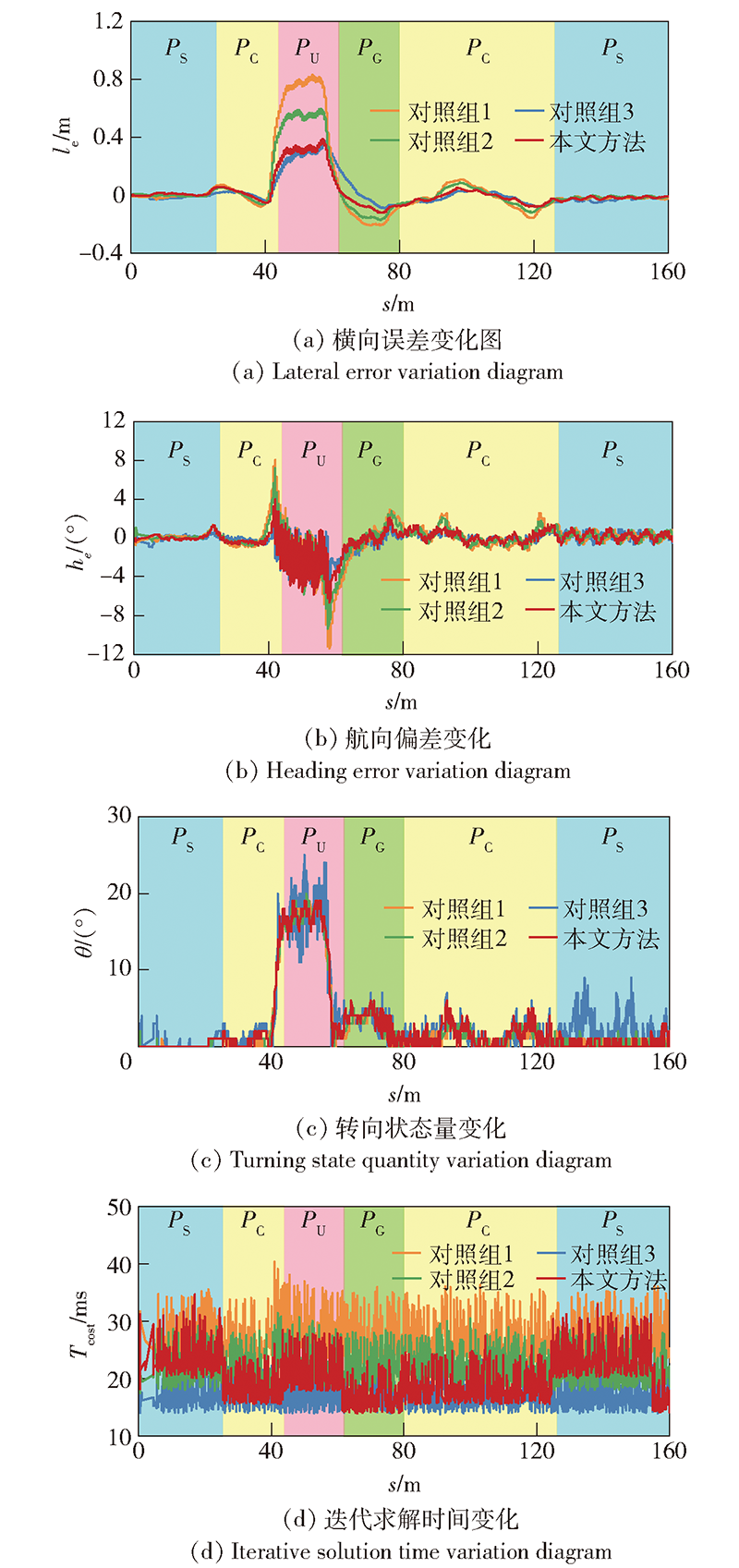
Fig.11 Simulated trajectory tracking performance
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.147 | 1.202 | 0.138 | 26.490 |
| 对照组2 | 0.112 | 1.008 | 0.257 | 21.940 |
| 对照组3 | 0.072 | 0.694 | 0.602 | 17.111 |
| 本文算法 | 0.075 | 0.824 | 0.262 | 20.297 |
Table 2 Statistics of simulated tracking performance
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.147 | 1.202 | 0.138 | 26.490 |
| 对照组2 | 0.112 | 1.008 | 0.257 | 21.940 |
| 对照组3 | 0.072 | 0.694 | 0.602 | 17.111 |
| 本文算法 | 0.075 | 0.824 | 0.262 | 20.297 |
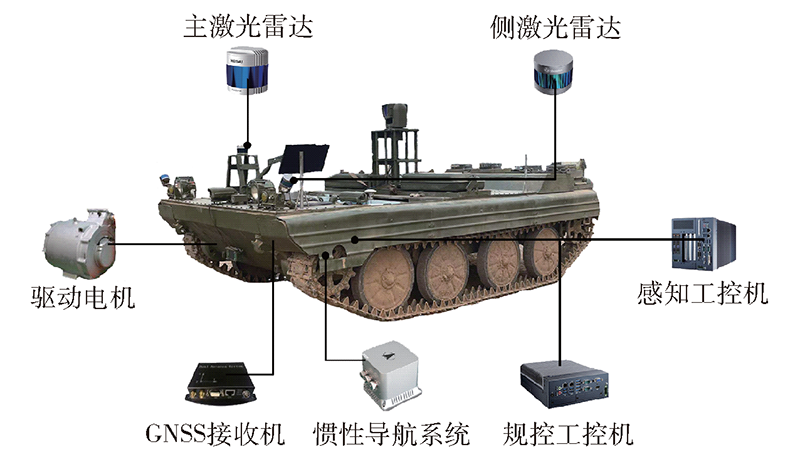
Fig.12 Experimental platform of the unmanned tracked vehicle
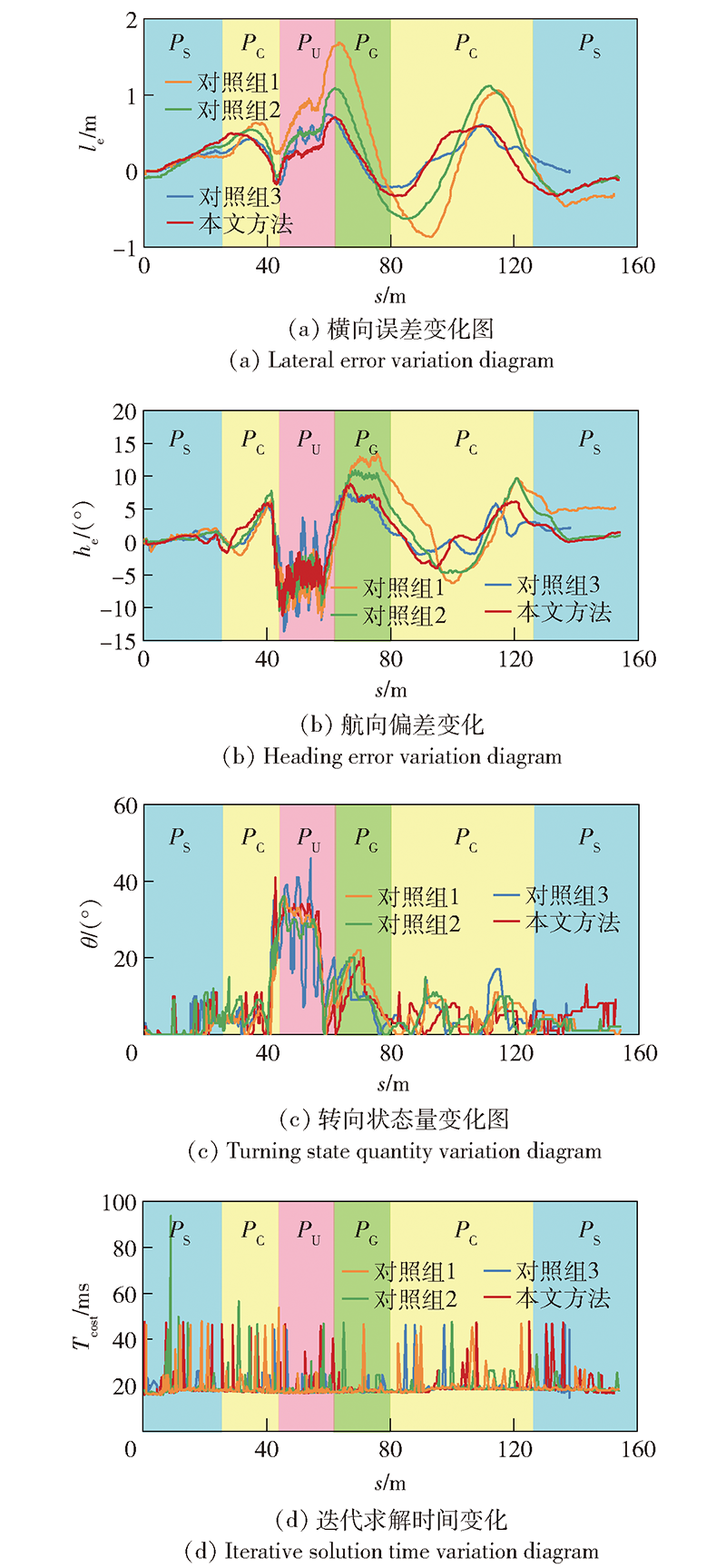
Fig.13 Track performance for the unmanned tracked vehicle
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.419 | 3.746 | 0.801 | 19.302 |
| 对照组2 | 0.394 | 3.828 | 0.991 | 19.113 |
| 对照组3 | 0.188 | 2.321 | 1.075 | 18.203 |
| 本文算法 | 0.274 | 3.171 | 0.914 | 18.789 |
Table 3 Statistics of the tracking performance in real vehicle experiments
| 试验组别 | /m | /(°) | |Δ |/((°)·s-1) | /ms |
|---|---|---|---|---|
| 对照组1 | 0.419 | 3.746 | 0.801 | 19.302 |
| 对照组2 | 0.394 | 3.828 | 0.991 | 19.113 |
| 对照组3 | 0.188 | 2.321 | 1.075 | 18.203 |
| 本文算法 | 0.274 | 3.171 | 0.914 | 18.789 |
| [1] |
doi: 10.1109/TVT.25 URL |
| [2] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3):585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [3] |
|
| [4] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3):456-463.
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
|
|
| [5] |
doi: 10.1016/j.ymssp.2019.01.005 URL |
| [6] |
|
| [7] |
doi: 10.1109/TITS.6979 URL |
| [8] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6):1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [9] |
|
| [10] |
刘凯, 陈慧岩, 龚建伟, 等. 高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5):514-521.
|
|
|
|
| [11] |
赵新, 纪永祥, 罗熙斌, 等. 基于改进粒子群优化算法的近炸引信最佳炸高计算方法[J]. 兵工学报, 2021, 42(5):924-929.
|
|
doi: 10.3969/j.issn.1000-1093.2021.05.004 |
|
| [12] |
谭顿, 陶建峰, 王旭永. 基于改进粒子群算法的双液压马达同步控制策略[J]. 机械工程学报, 2020, 56(16):254-261.
doi: 10.3901/JME.2020.16.254 |
|
doi: 10.3901/JME.2020.16.254 |
|
| [13] |
doi: 10.1016/j.ymssp.2021.107701 URL |
| [14] |
刘海鸥, 卢佳兴, 彭建鑫, 等. 基于决策树算法的AMT挂挡过程冗余控制研究[J]. 北京理工大学学报, 2022, 42(1):63-73.
|
|
|
|
| [15] |
高玉波, 张伟, 李达诚, 等. 基于反向传播神经网络的陶瓷损伤参数反演分析[J]. 兵工学报, 2018, 39(1):146-152.
doi: 10.3969/j.issn.1000-1093.2018.01.016 |
|
|
|
| [16] |
牛江川, 韩利涛, 李素娟, 等. 基于PSO-BP神经网络的盾构刀具配置研究[J]. 机械工程学报, 2018, 54(10):167-172.
doi: 10.3901/JME.2018.10.167 |
|
doi: 10.3901/JME.2018.10.167 |
|
| [17] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3):600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [18] |
王红岩, 陈冰, 芮强, 等. 集中载荷作用下的履带车辆稳态转向分析与试验[J]. 兵工学报, 2016, 37(12): 2196-2204.
doi: 10.3969/j.issn.1000-1093.2016.12.003 |
|
|
|
| [19] |
王博洋, 龚建伟, 张瑞增, 等. 基于真实驾驶数据的运动基元提取与再生成[J]. 机械工程学报, 2020, 56(16): 155-165.
doi: 10.3901/JME.2020.16.155 |
|
doi: 10.3901/JME.2020.16.155 |
|
| [20] |
|
| [1] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [2] | WANG Xu, LI Rui, HUANG Ying, SHEN Jiwei, SHANG Xianhe. Construction of Driving Cycle for Military Tracked Vehicles Considering Road Features [J]. Acta Armamentarii, 2024, 45(3): 907-915. |
| [3] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [4] | XU Peng, ZHAO Jianxin, FAN Wenhui, QIU Tianqi, JIANG Lei, LIANG Zhenjie, LIU Yufei. Specific Complex Locomotion Skills Control for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 135-145. |
| [5] | LIU Jia, LIU Hai’ou, CHEN Huiyan, MAO Feihong. Road Types Identification Method of Unmanned Tracked Vehicles Based on Fusion Features [J]. Acta Armamentarii, 2023, 44(5): 1267-1276. |
| [6] | SHENG Hui, XIANG Changle, GAI Jiangtao, YUAN Yi, JIAN Hongchao, ZHANG Nan. Vehicle Safety Control of Tracked Vehicle Driven by Two-sided Motor Coupling under the Failure Mode of One-sided Motor [J]. Acta Armamentarii, 2023, 44(11): 3498-3507. |
| [7] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [8] | ZHOU Cheng, LUO Yang, WEI Jiang, CAO Hongrui, LAN Hai, ZHANG Wanhao. Extraction Method of Instantaneous Frequency Feature of Torsional Vibration Signals of Tracked Vehicle Brake [J]. Acta Armamentarii, 2023, 44(1): 316-324. |
| [9] | ZHANG Faping, ZHANG Shuchang, WU Kai, ZHANG Yunhe, YAN Yan. Dynamics Parameter Optimization for Tracked Vehicle Based on Surrogate Model Evolution [J]. Acta Armamentarii, 2023, 44(1): 27-39. |
| [10] | ZHANG Ruizeng, GONG Jianwei, CHEN Huiyan, LIU Haiou, LU Jiaxing. Turning Model for Tracked Vehicles on Hard Ground: Analysis and Verification [J]. Acta Armamentarii, 2023, 44(1): 233-246. |
| [11] | YUAN Yi, GAI Jiangtao, ZHOU Guangming, GAO Xiucai, LI Xunming, MA Changjun. Analysis of High-Speed Electric Tracked Vehicle’s Handling Characteristics [J]. Acta Armamentarii, 2023, 44(1): 203-213. |
| [12] | SHUAI Zhibin, HE Shuai, LI Guohui, LI Yaoheng, LI Yong, ZHANG Ying, JIAN Hongchao. Modeling and Optimal Control of Low-Temperature Starting Process of Electro-Mechanical Transmission for Special Tracked Vehicles [J]. Acta Armamentarii, 2023, 44(1): 117-128. |
| [13] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [14] | XIA Meng, ZHAO Chang-lu, HUANG Ying, ZHANG Fu-jun, LI Gang. Research on Feedforward-feedback Speed Control of Turbocharged Diesel Engine [J]. Acta Armamentarii, 2016, 37(9): 1561-1569. |
| [15] | ZENG Qing-han, MA Xiao-jun, LIAO Zi-li, WEI Shu-guang. Stable Steer Control of Electric Drive Tracked Vehicle Based on Equivalent Sliding Mode Technique with Conditional Integrator [J]. Acta Armamentarii, 2016, 37(8): 1351-1358. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||