
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (3): 841-850.doi: 10.12382/bgxb.2021.0800
Previous Articles Next Articles
XIONG Guangming( ), YU Quanfu(), HU Xiuzhong(), ZHOU Zijie(), XU Jiahui()
), YU Quanfu(), HU Xiuzhong(), ZHOU Zijie(), XU Jiahui()
Received:2021-11-25
Online:2022-06-15
XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles[J]. Acta Armamentarii, 2023, 44(3): 841-850.
Add to citation manager EndNote|Ris|BibTeX
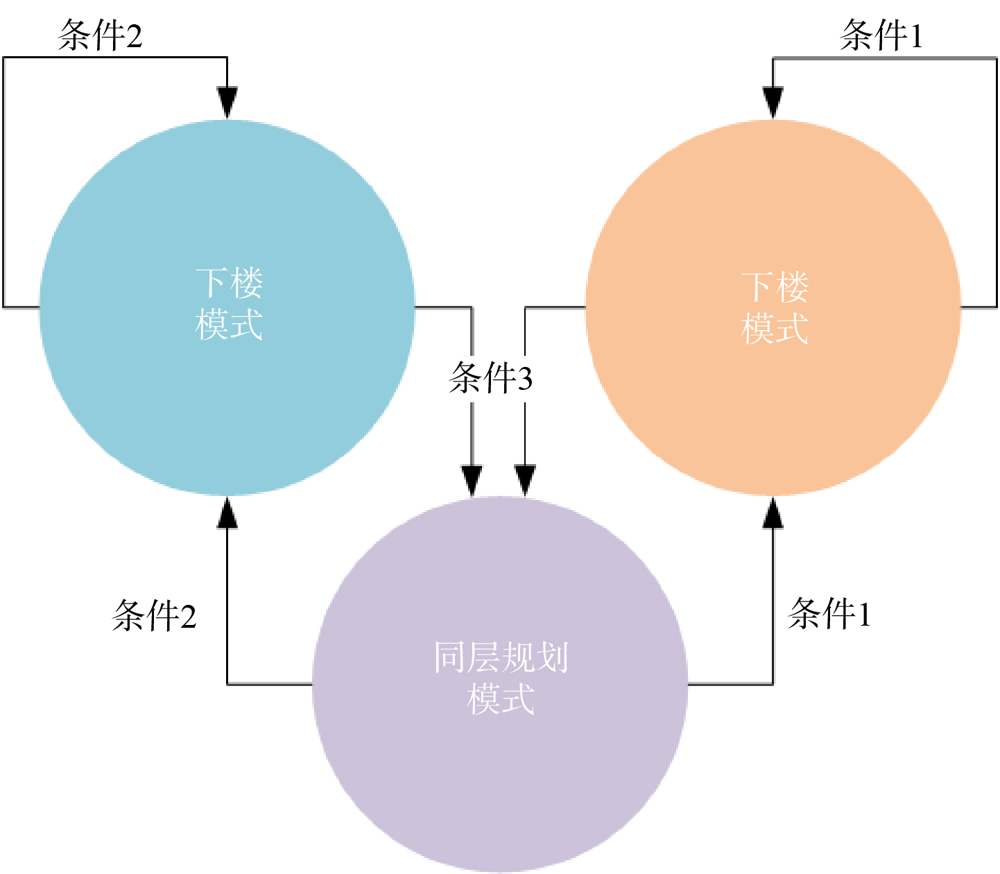
Fig. 1 Schematic diagram of Finite State Machine decision model
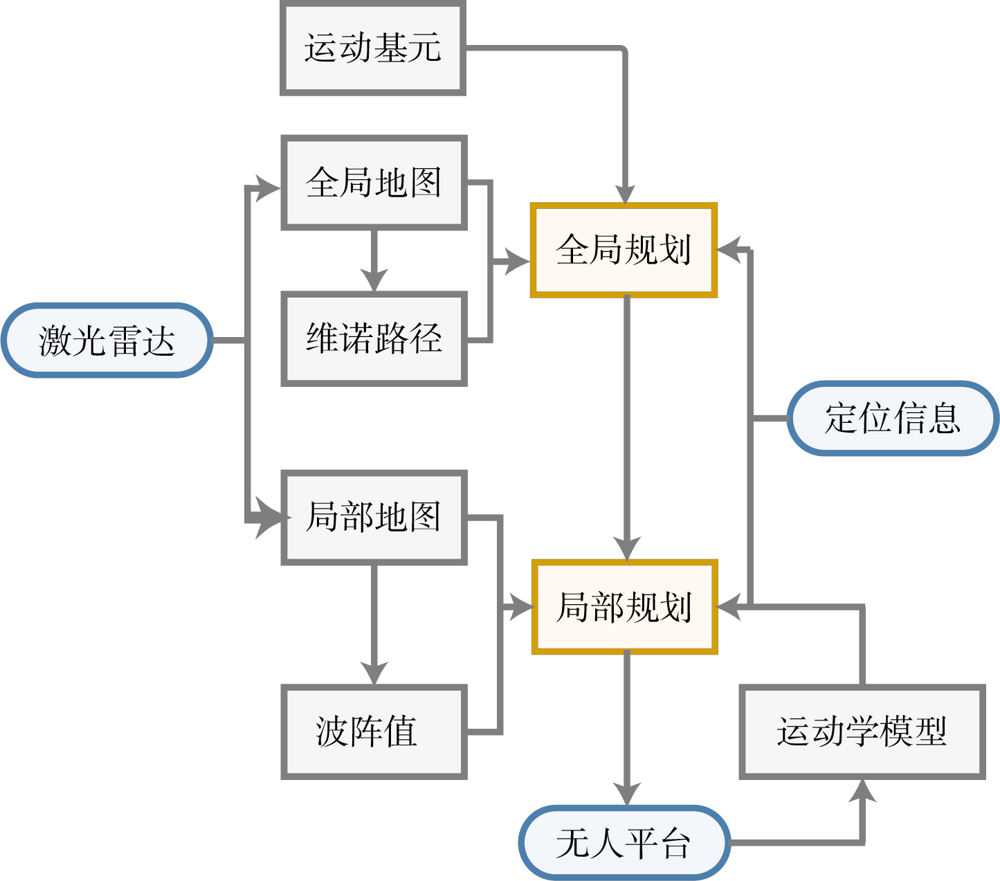
Fig. 2 Schematic diagram of motion planning framework
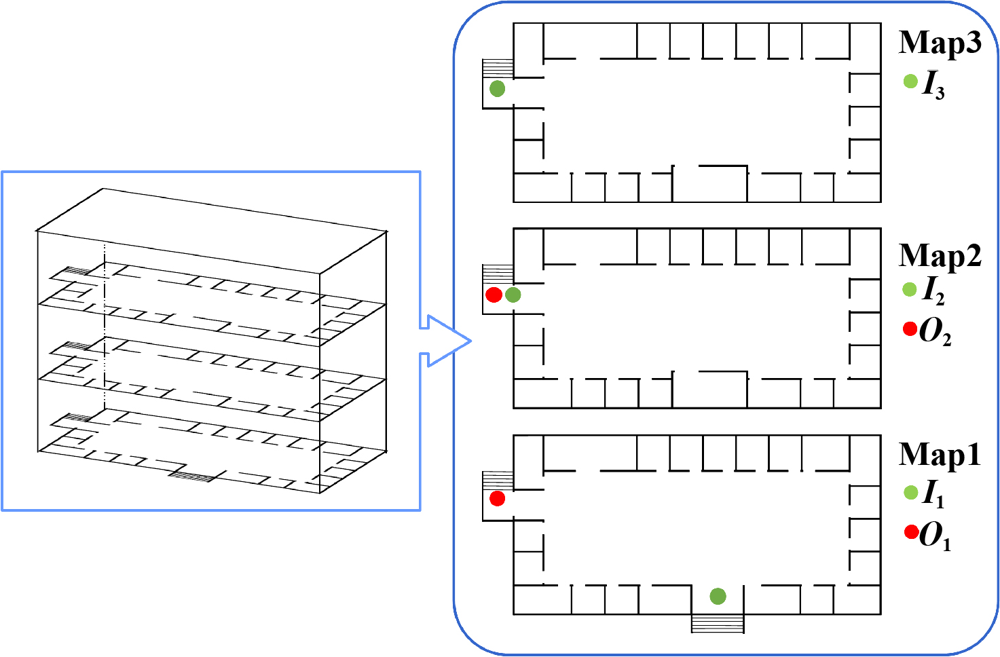
Fig. 3 Schematic diagram of the multi-storey building hierarchical map
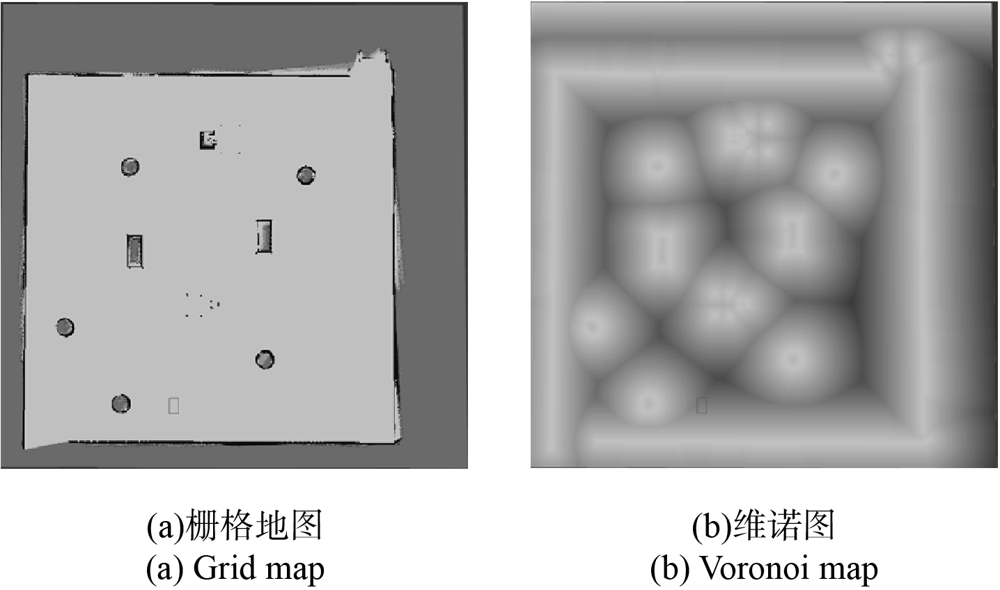
Fig. 4 Grid map of an indoor environment and its Voronoi map

Fig. 5 Schematic diagram of traditional motion primitives
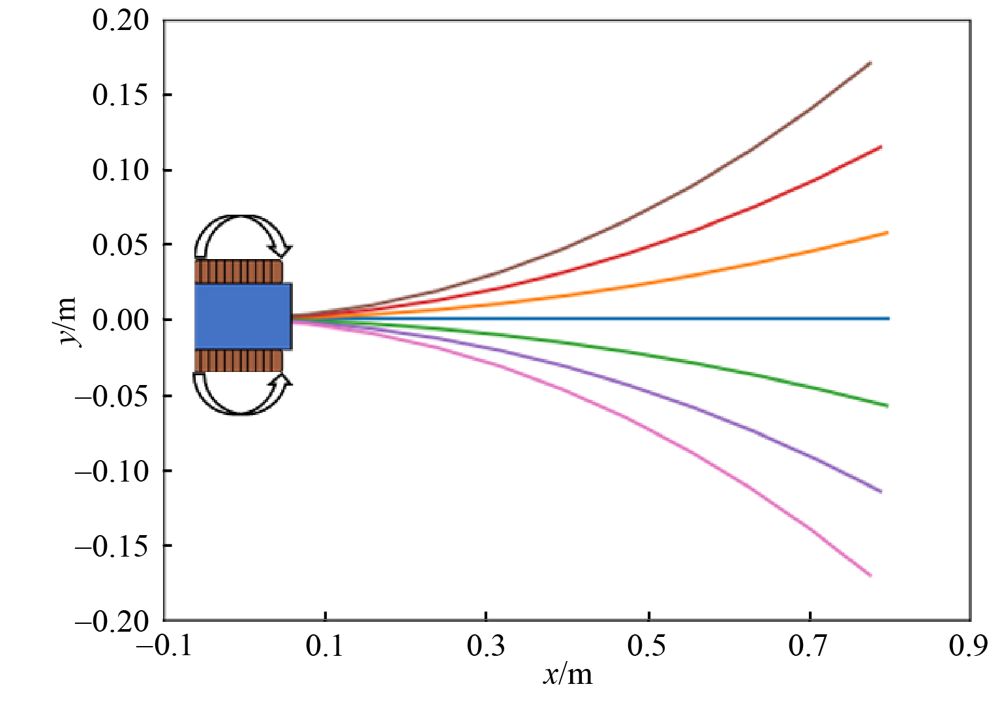
Fig. 6 Schematic diagram of zero-radius motion primitives
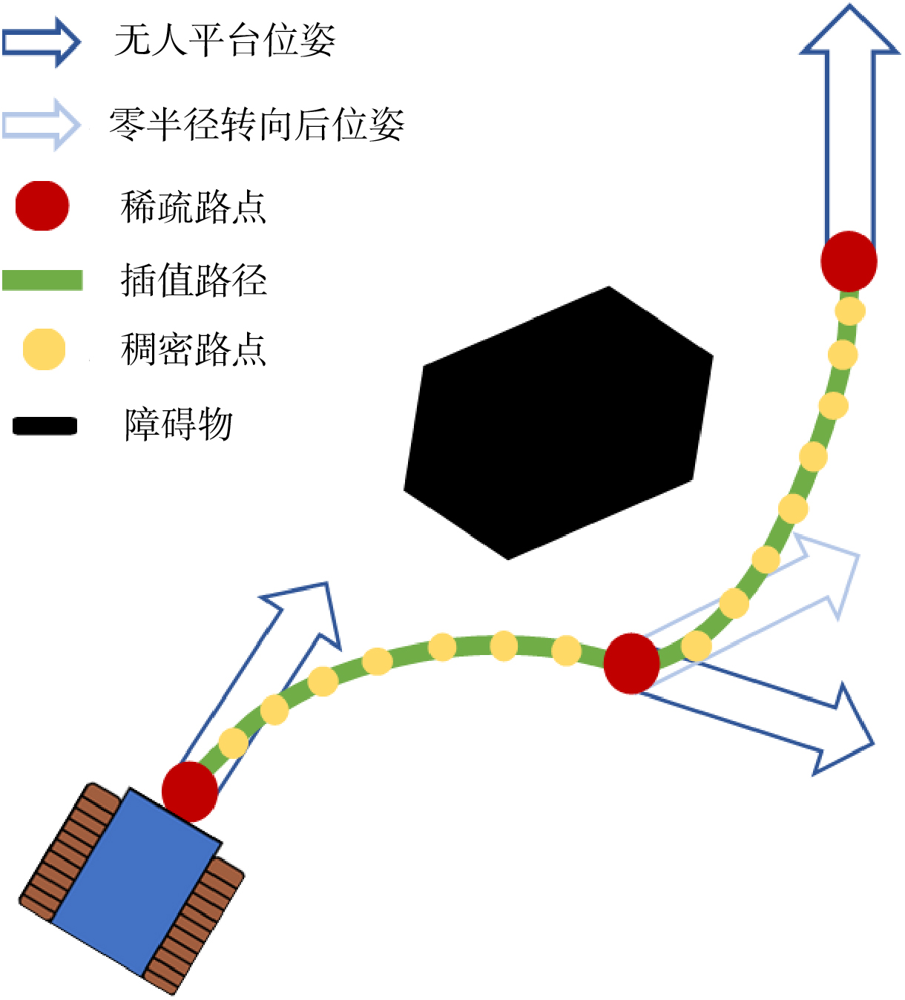
Fig. 7 Schematic diagram of path smoothing
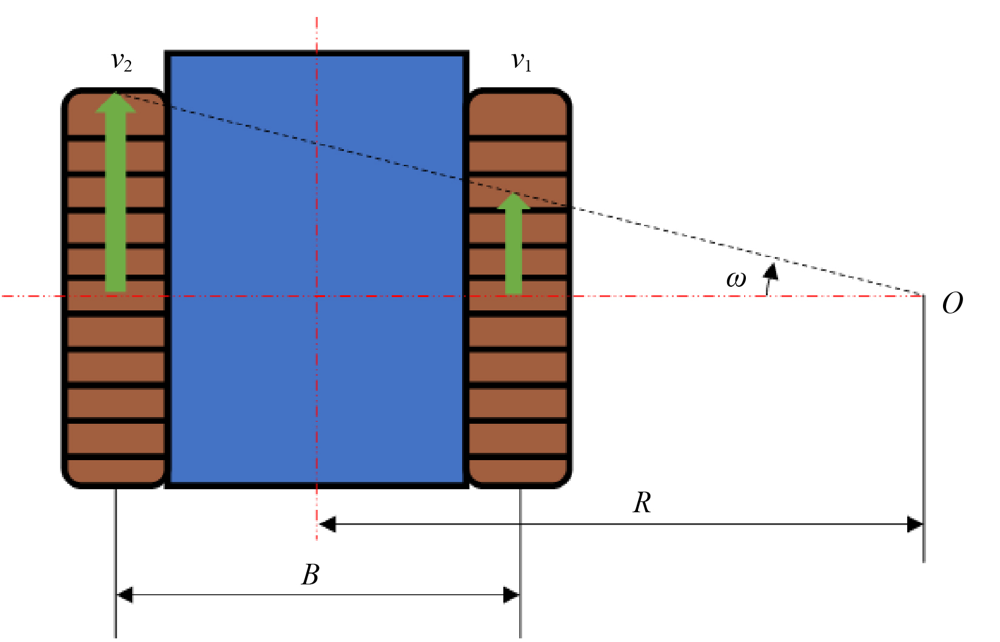
Fig. 8 Schematic diagram of the kinematic geometric relationship of the tracked unmanned platform

Fig. 9 Schematic diagram of trajectory prediction
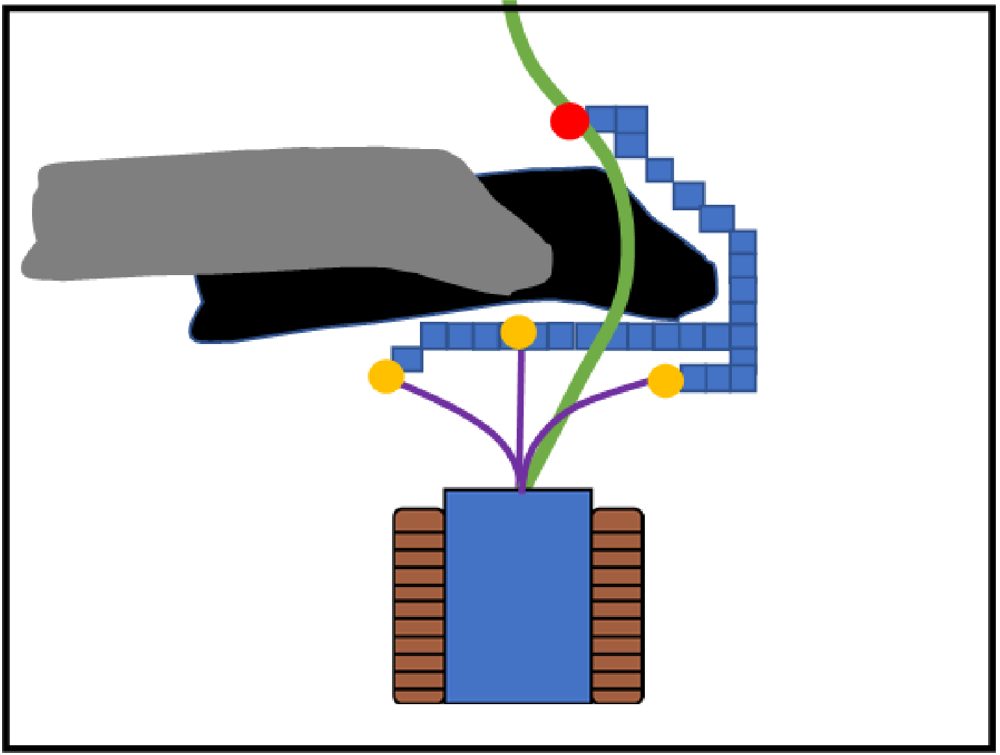
Fig. 10 Schematic diagram of Wavefront Value avoiding local minimum

Fig. 11 Schematic diagram of the simulation environment
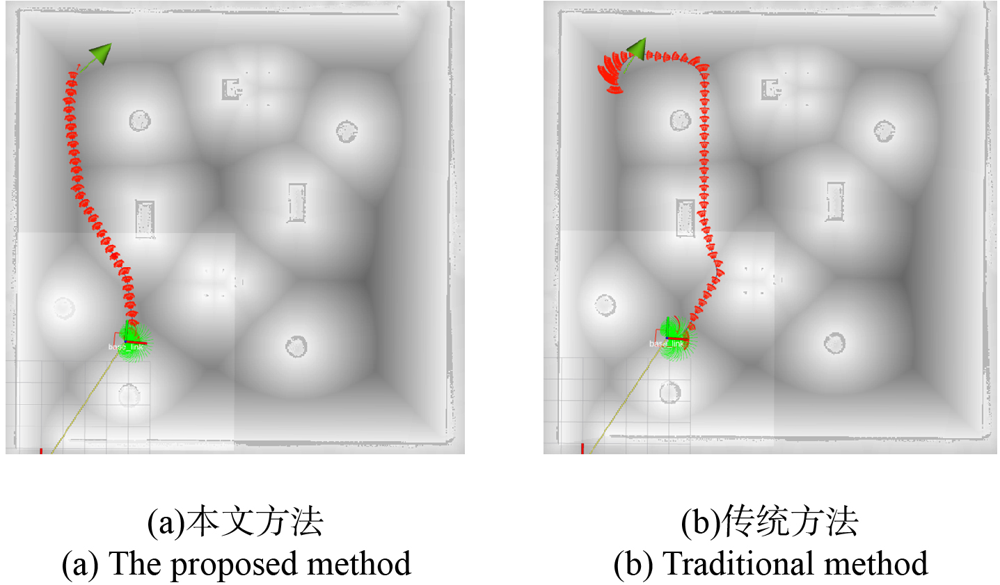
Fig. 12 Comparison of the global planner’s simulation results
| 算法 | 扩展基元数量/个 | 路径长度/m | 搜索耗时/ms |
|---|---|---|---|
| 传统基元A* | 452 | 18.0 | 36.8 |
| 本文算法 | 466 | 12.4 | 39.2 |
Table 1 Simulation results of the global planner
| 算法 | 扩展基元数量/个 | 路径长度/m | 搜索耗时/ms |
|---|---|---|---|
| 传统基元A* | 452 | 18.0 | 36.8 |
| 本文算法 | 466 | 12.4 | 39.2 |

Fig. 13 Comparison of the local planner’s simulation results (left picture shows encountering obstacles, right picture shows bypassing obstacles)

Fig. 14 Appearance of the unmanned platform in the experiment

Fig. 15 Starting point and target point in the experiment
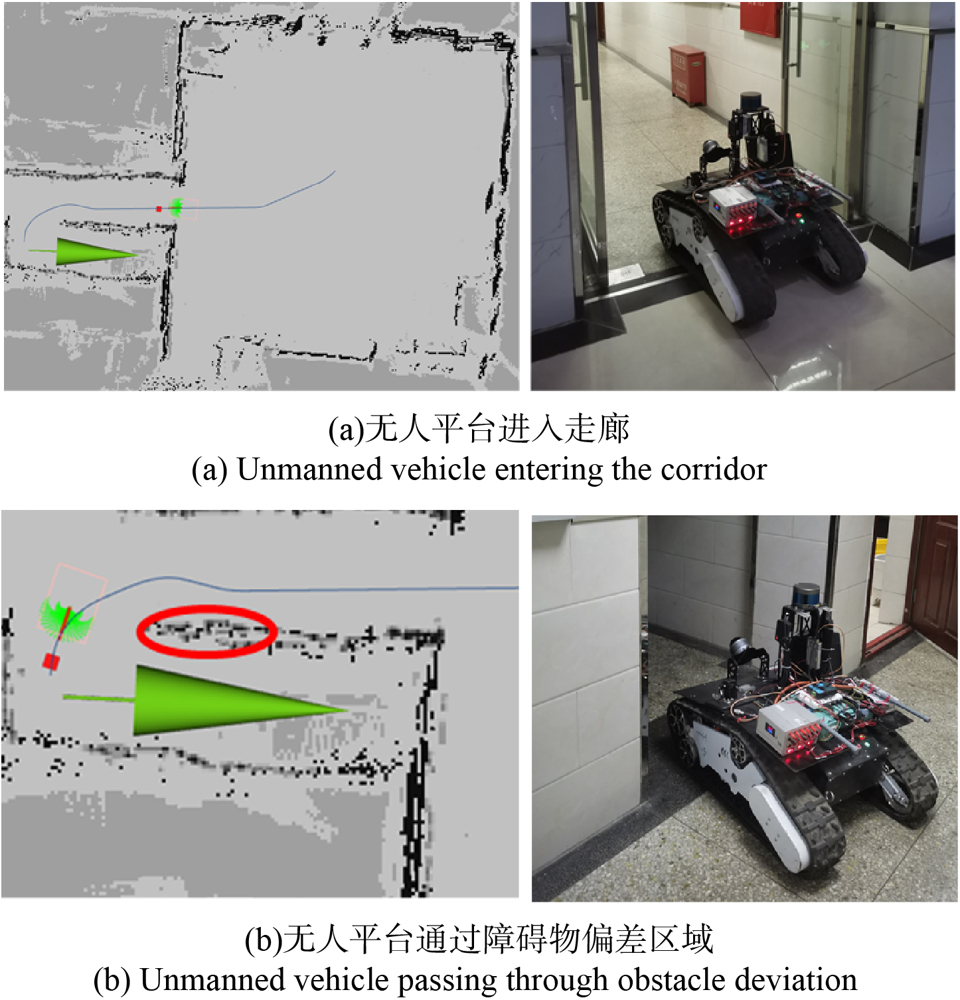
Fig. 16 Experimental results of the first floor (the left is the planned path, and the right is the real scene)

Fig. 17 Experimental results of the stair area

Fig. 18 Experimental results of the platform area

Fig.19 Experimental results on the third floor (the left is the planned path, right is the real scene)
| 阶段 | 路径长度/m | 实际运动时间/s | 平均速度/(m·s-1) | 最大速度/(m·s-1) |
|---|---|---|---|---|
| 第1层区域 | 15.2 | 77 | 0.20 | 0.4 |
| 楼梯区域 | 40.6 | 463 | 0.10 | 0.2 |
| 第3层区域 | 23.7 | 152 | 0.16 | 0.4 |
Table 2 Results of the experiment
| 阶段 | 路径长度/m | 实际运动时间/s | 平均速度/(m·s-1) | 最大速度/(m·s-1) |
|---|---|---|---|---|
| 第1层区域 | 15.2 | 77 | 0.20 | 0.4 |
| 楼梯区域 | 40.6 | 463 | 0.10 | 0.2 |
| 第3层区域 | 23.7 | 152 | 0.16 | 0.4 |
| [1] |
DARPA. DARPA Announces subterranean (SubT) challenge final event site and date[EB/OL]. [2021-07-01]. https://www.darpa.mil/news-events/2020-01-07.
|
| [2] |
全军武器信息采购网. “跨越险阻2021”第四届陆上无人系统挑战赛赛事通知[EB/OL]. [2021-06-03]. http://www.weain.mil.cn/cggg/jdgg/1400087198603255810.shtml.
|
|
All army weapon information procurement network. Notice of the fourth "Crossing Obstacles 2021" land unmanned system challenge[EB/OL]. [2021-06-03]. http://www.weain.mil.cn/cggg/jdgg/1400087198603255810.shtml. (in Chinese)
|
|
| [3] |
|
| [4] |
doi: 10.1002/rob.21462 URL |
| [5] |
doi: 10.1177/0278364902021010841 URL |
| [6] |
doi: 10.1177/0278364906075328 URL |
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
doi: 10.1109/TITS.2021.3054921 URL |
| [14] |
|
| [15] |
夏娜, 束强, 赵青, 等. 基于维诺图和二分图的水面移动基站路径规划方法[J]. 自动化学报, 2016, 42(8):1185-1197.
|
|
|
|
| [16] |
doi: 10.1109/TASE.2020.3016276 URL |
| [17] |
doi: 10.1007/s11548-019-01923-3 |
| [18] |
|
| [19] |
王威, 陈慧岩, 马建昊, 等. 基于Frenet坐标系和控制延时补偿的智能车辆路径跟踪[J]. 兵工学报, 2019, 40(11):2336-2351.
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
| [20] |
|
| [21] |
|
| [1] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [2] | KONG Guojie, FENG Shi, YU Huilong, JU Zhiyang, GONG Jianwei. A Review on Cooperative Motion Planning of Unmanned Vehicles [J]. Acta Armamentarii, 2023, 44(1): 11-26. |
| [3] | CHEN Hui-yan, ZHANG Yu. An Overview of Research on Military Unmanned Ground Vehicles [J]. Acta Armamentarii, 2014, 35(10): 1696-1706. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||