
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (3): 783-791.doi: 10.12382/bgxb.2021.0769
Previous Articles Next Articles
GAO Quanxi( ), KE Wei(), QIAO Haiyan()
), KE Wei(), QIAO Haiyan()
Received:2021-11-14
Online:2022-07-01
GAO Quanxi, KE Wei, QIAO Haiyan. Underwater Vehicle Control Based on Linear Active Disturbance Rejection[J]. Acta Armamentarii, 2023, 44(3): 783-791.
Add to citation manager EndNote|Ris|BibTeX
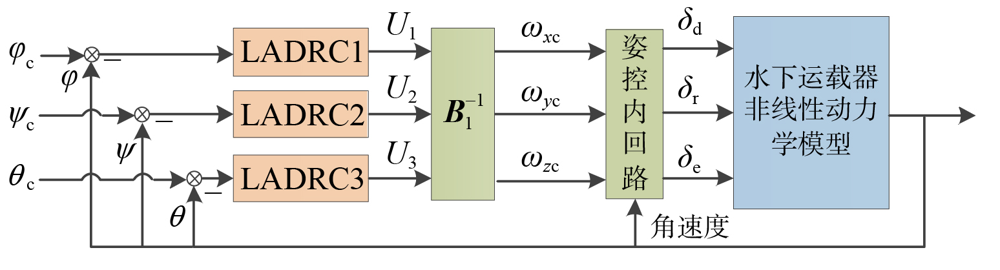
Fig. 1 Attitude control loop of the underwater vehicle based on LADRC
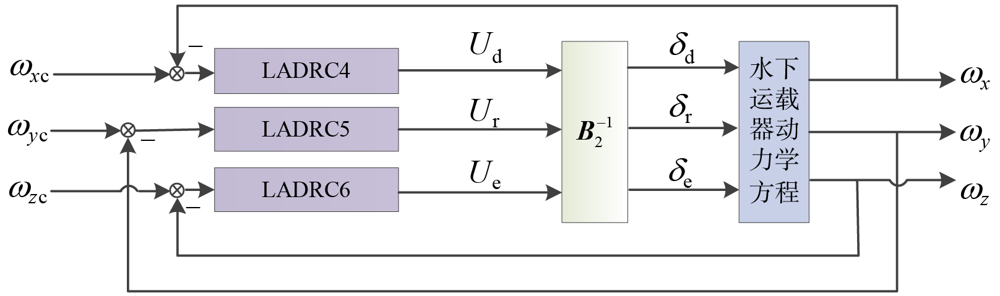
Fig. 2 Decoupling control block diagram of attitude control inner loop of the underwater vehicle
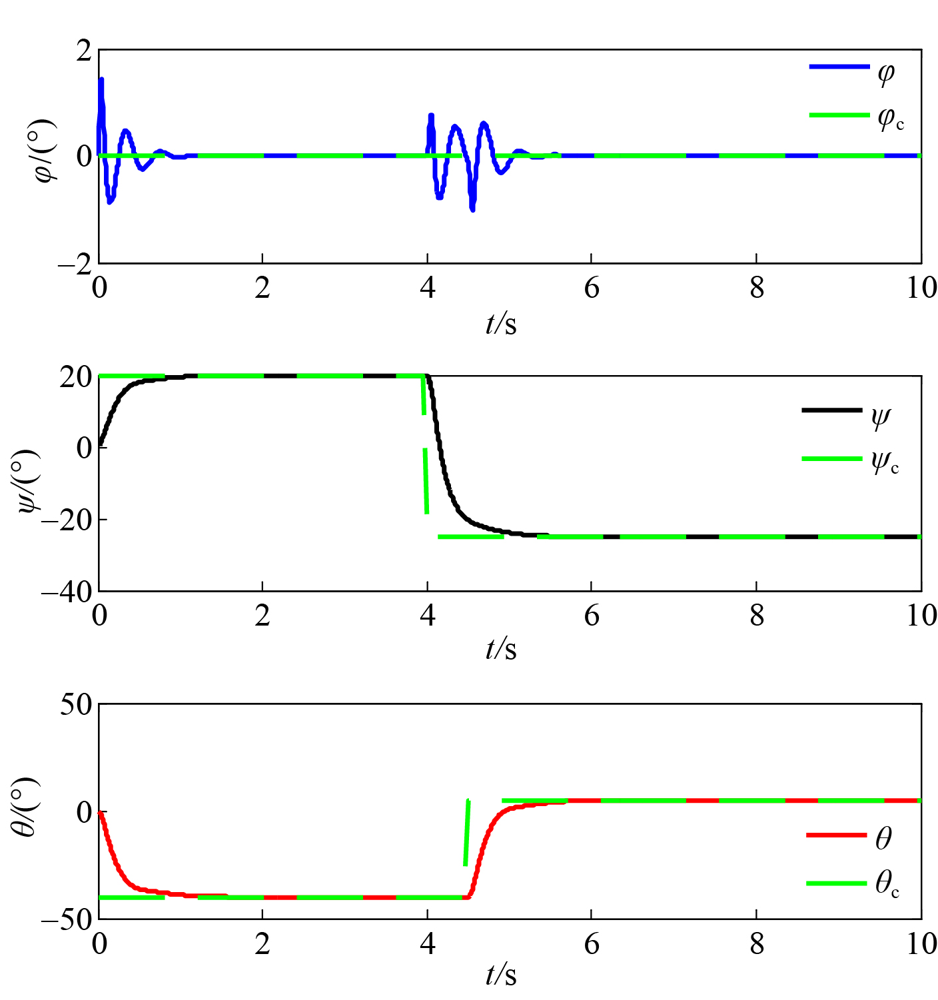
Fig. 3 Attitude angle response curves of roll, yaw and pitch channels
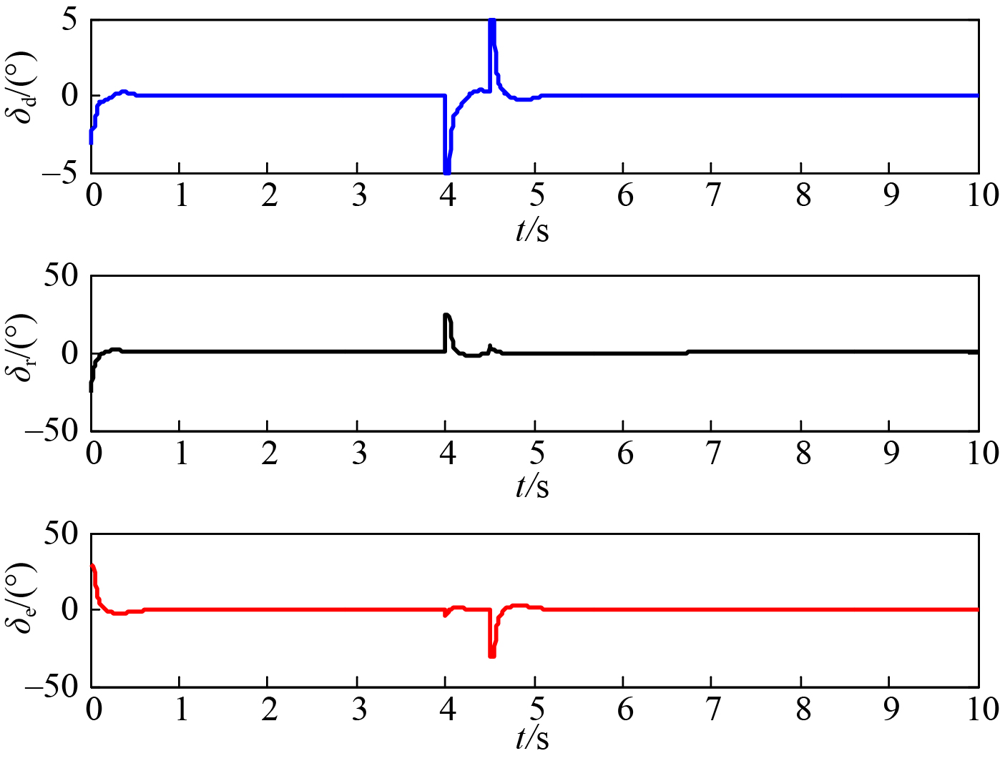
Fig. 4 Ruder deflection curves of roll, yaw and pitch channels
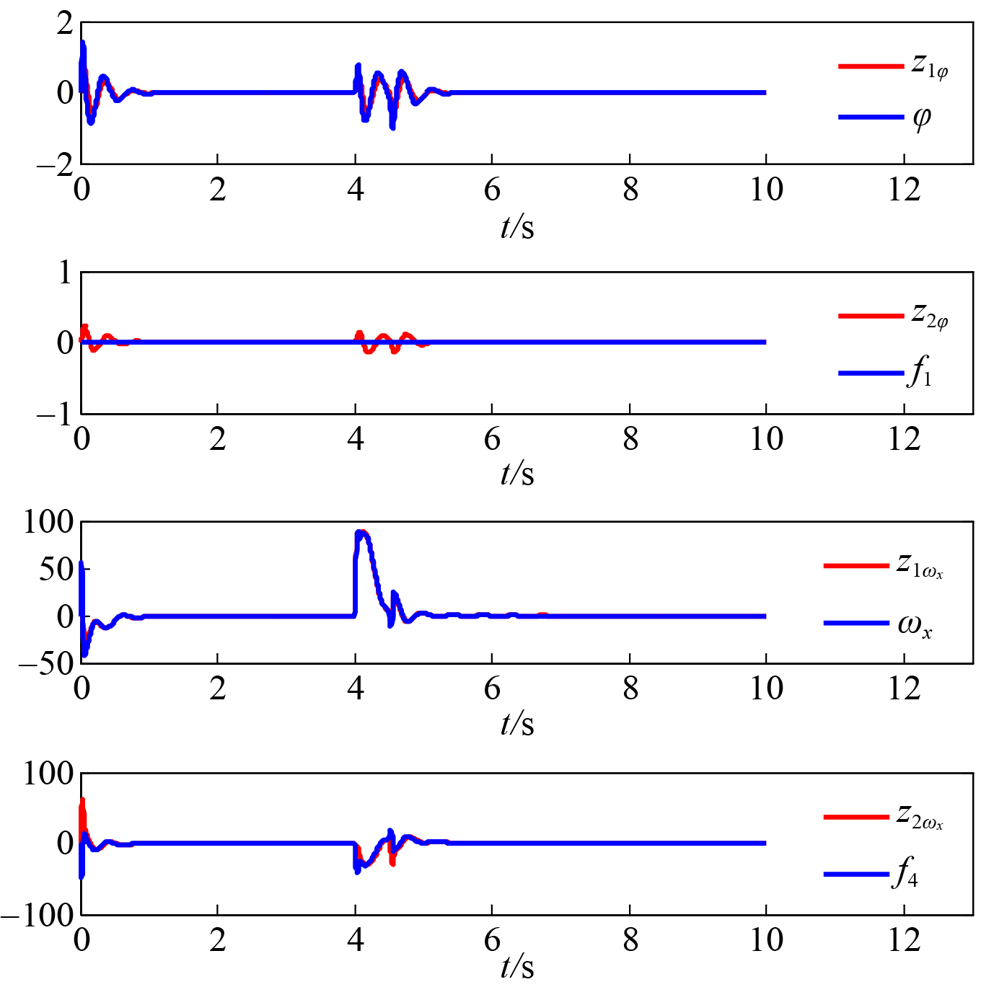
Fig. 5 State estimation of rolling channel by ESO
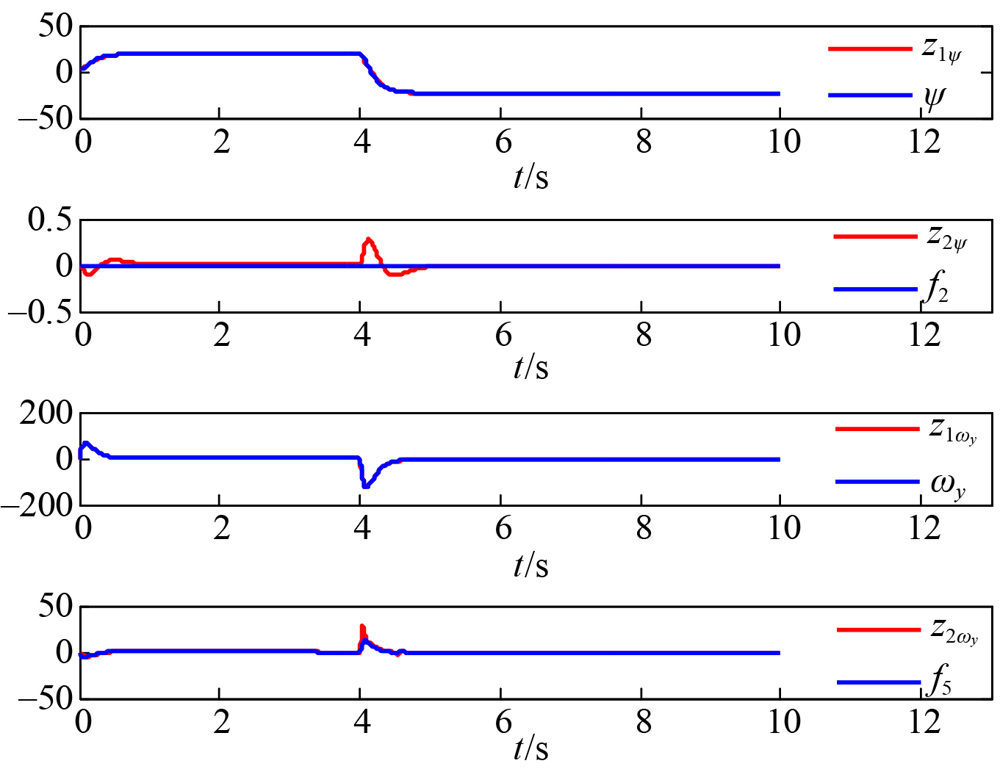
Fig. 6 State estimation of yaw channel by ESO
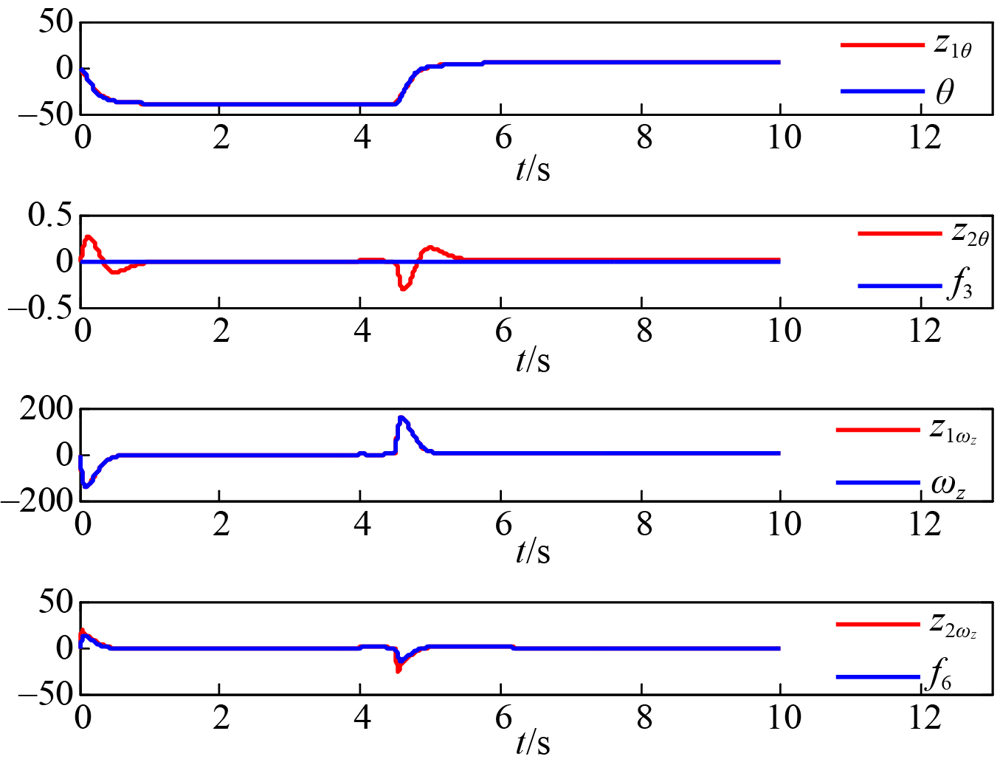
Fig. 7 State estimation of pitch channel by ESO
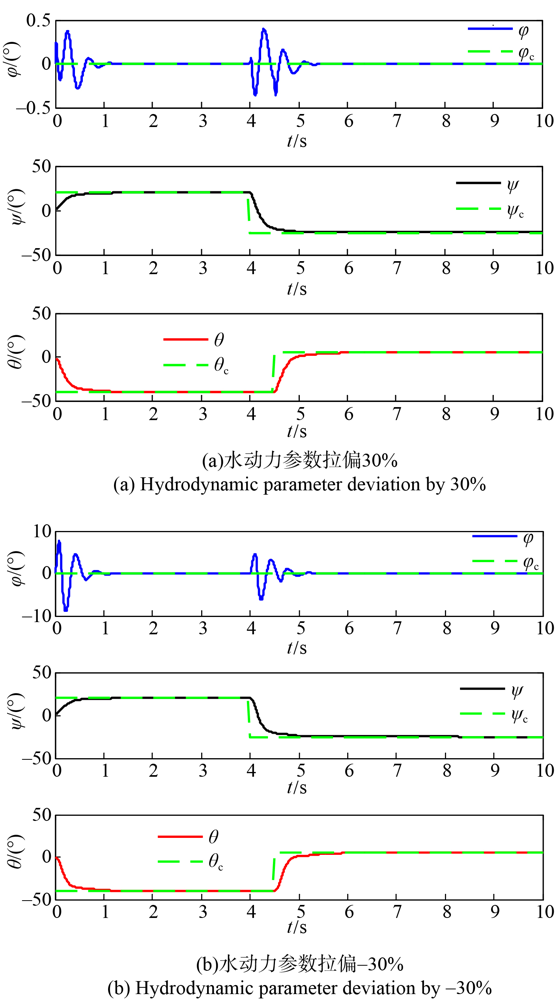
Fig. 8 Hydrodynamic parameter deviation by ±30%
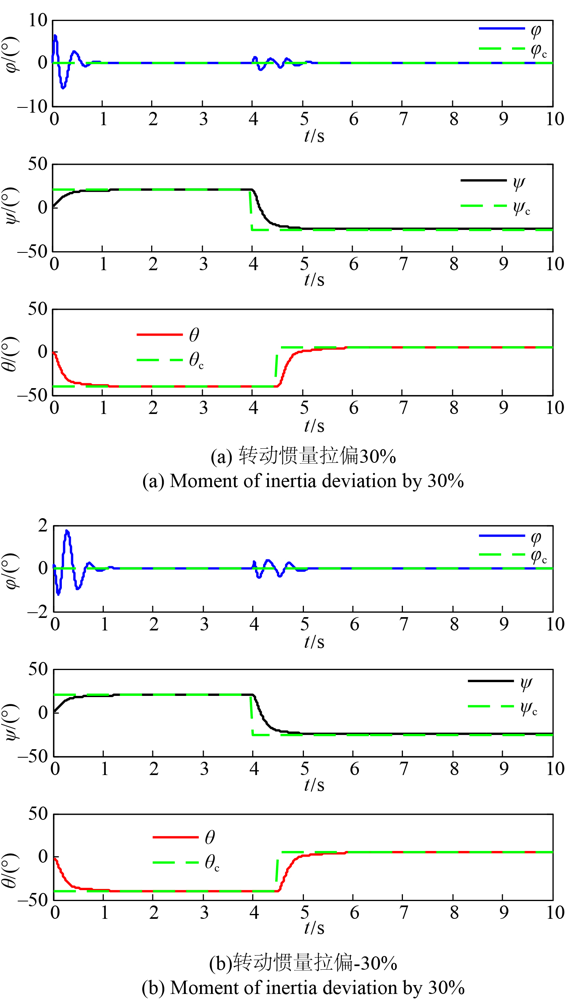
Fig. 9 Moment of inertia deviation by ±30%
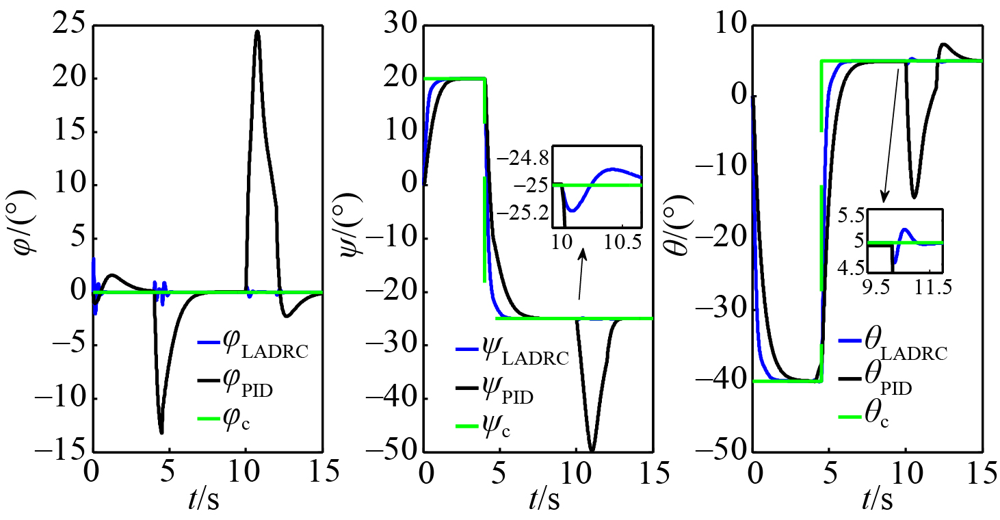
Fig. 10 Attitude response under ocean current disturbance
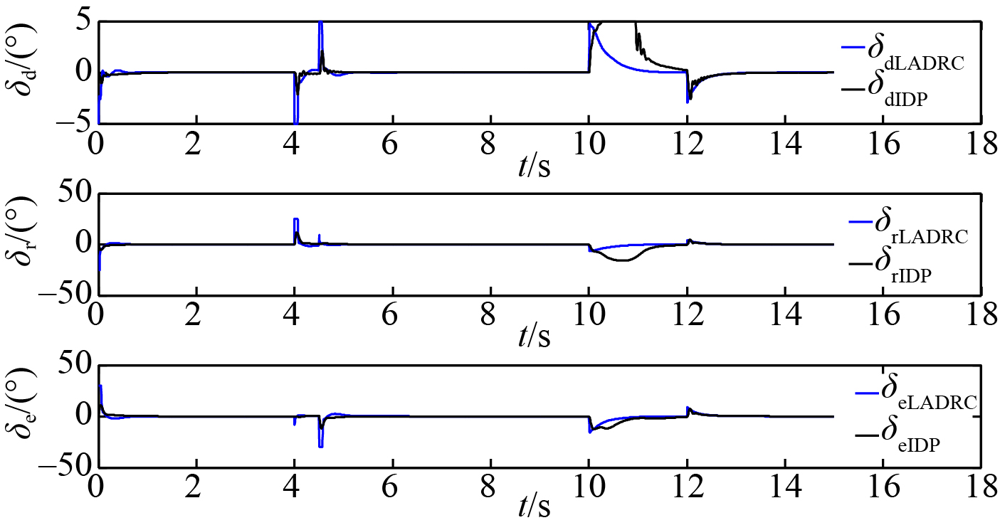
Fig. 11 Rudder deflection curves of LADRC and PID
Fig. 11 Horizontal comparison under different disturbance conditions
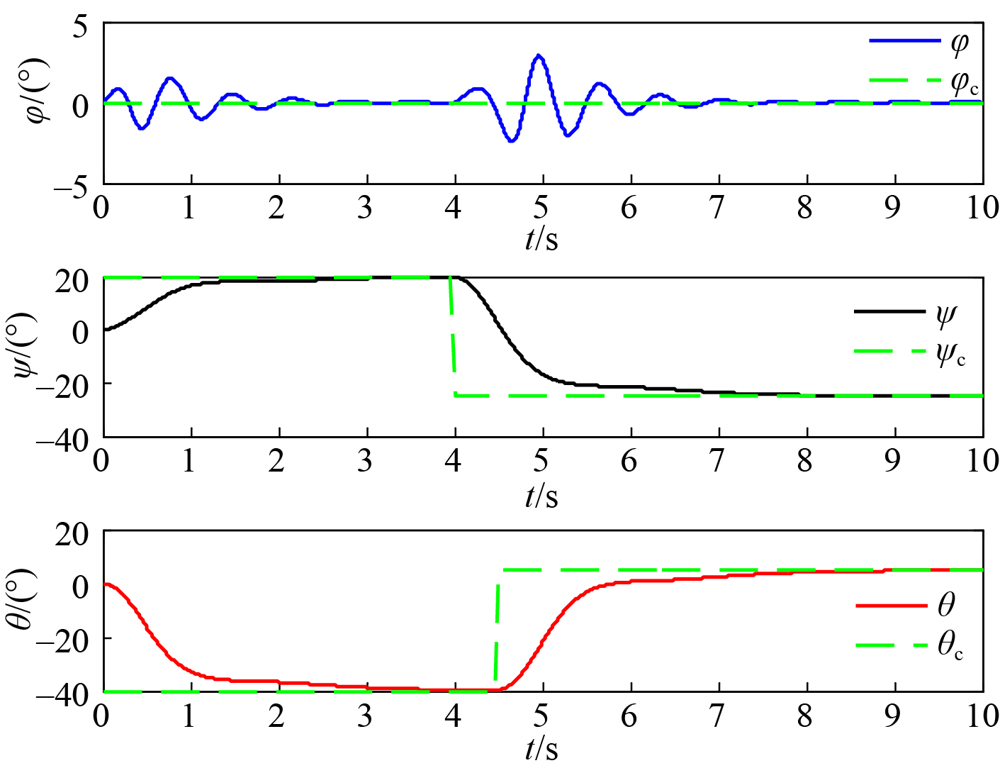
Fig. 13 Attitude angle response curves at 5 kn speed
| [1] |
崔乃刚, 白瑜亮, 常亚武, 等. 基于非线性动态逆的水下运载器控制方法研究[J]. 兵工学报, 2013, 34(4):443-449.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 04. 010 |
|
|
|
| [2] |
张海洋, 谷海涛, 林扬, 等. 无动力运载器倾斜爬升式上浮特性分析[J]. 中国舰船研究, 2020, 15(1):38-47.
|
|
|
|
| [3] |
韩京清. 自抗扰控制技术[J]. 前沿科学, 2007, 1(1): 24-31.
|
|
|
|
| [4] |
陈增强, 刘俊杰, 孙明玮. 一种新型控制方法—自抗扰控制技术及其工程应用综述[J]. 智能系统学报, 2018, 13(6): 865-877.
|
|
|
|
| [5] |
doi: 10.1109/TCST.2008.2008638 URL |
| [6] |
doi: 10.1007/s11071-019-05139-7 |
| [7] |
胡坤, 张孝芳, 刘常波. 基于遗传算法的无人水下航行器深度自抗扰控制[J]. 兵工学报, 2013, 34(2):217-222.
doi: 10.3969/j.issn.1000-1093.2013.02.014 |
|
doi: 10.3969/j.issn.1000-1093.2013.02.014 |
|
| [8] |
黄健. 自抗扰技术在水下航行体横滚姿态控制中的应用研究[J]. 船舶工程, 2014, 36(1):131-134.
|
|
|
|
| [9] |
施小成, 陈江, 严浙平. 基于自抗扰方法的UUV近水面垂直面运动控制[J]. 鱼雷技术, 2011, 19(5):209-213.
|
|
|
|
| [10] |
doi: 10.1109/TIE.2012.2203777 URL |
| [11] |
doi: 10.1109/TPEL.2021.3055143 URL |
| [12] |
doi: 10.1002/asjc.2013.15.issue-2 URL |
| [13] |
doi: 10.1080/00207170600936555 URL |
| [14] |
陈增强, 孙明玮, 杨瑞光. 线性自抗扰控制器的稳定性研究[J]. 自动化学报, 2013, 29(5): 575-580.
|
|
|
|
| [15] |
高阳, 吴文海, 王子健. 具有输入约束和输出噪声的不确定系统级联线性自抗扰控制[J]. 自动化学报, 2022, 48(3):843-852.
|
|
|
|
| [16] |
doi: 10.3390/app9235113 URL |
| [17] |
doi: 10.1061/(ASCE)AS.1943-5525.0001274 URL |
| [18] |
黄健, 何江虹. 基于线性自抗扰控制的UUV航向控制器设计[J]. 计算机仿真, 2015, 32(6):324-328.
|
|
|
|
| [19] |
黄健, 舒晓菂. 基于线性ADRC的欠驱动UUV深度控制器设计[J]. 控制工程, 2019, 26(5):927-934.
|
|
|
|
| [20] |
严卫生. 鱼雷航行力学[M]. 西安: 西北工业大学出版社, 2005.
|
|
|
| [1] | DING Wengjun, ZHANG Guozong, LIU Haimin, CHAI Yajun, WANG Chiyu, MAO Zhaoyong. Tracking Control of Underactuated Autonomous Underwater Vehicle Formation under Current Disturbance and Communication Delay [J]. Acta Armamentarii, 2024, 45(1): 184-196. |
| [2] | WANG Yuchen, WANG Wei, LIN Shiyao, YANG Jing, WANG Shaolong, YIN Zhao. Three-dimensional Adaptive Sliding Mode Cooperative Guidance Law with Impact Time and Angle Constraints [J]. Acta Armamentarii, 2023, 44(9): 2778-2790. |
| [3] | LIU Hui, LIU Baoshuai, LIAO Dengting, HAN Lijin, CUI Shan. Adaptive Attitude Control of Wheel-legged Mobile Platform Based on Feedforward Compensation [J]. Acta Armamentarii, 2023, 44(9): 2756-2767. |
| [4] | ZHANG Jian, SHEN Lin. Simulation Analysis and Experimental Verification of the Electrical Energy Power System for Underwater Vehicles [J]. Acta Armamentarii, 2023, 44(7): 2101-2113. |
| [5] | ZHI Ruoyang, LUO Kai, WANG Hanwei, QIN Kan. Effects of Injection Mass Flow Rate and Position on the Performance of Partial Admission Axial Impulse Turbines with Jet Impingement Cooling [J]. Acta Armamentarii, 2023, 44(7): 2053-2065. |
| [6] | WANG Xuemin, YU Hongbo, ZHANG Xiangyu, AN Shu, LI Wenhai. Underwater Multi-target Detection Method Based on Hough Transform Track-before-detect Technique [J]. Acta Armamentarii, 2023, 44(7): 2114-2121. |
| [7] | LIU Yue, ZHAO Zijie, DAI Qi, WANG Anhua, ZHANG Hui. Load Characteristics of High Chamber Pressure and High Speed Launch of Underwater Vehicle [J]. Acta Armamentarii, 2023, 44(4): 1126-1138. |
| [8] | DU Xiao-xu, CUI Hang, XIANG Zhen-hui. The Multi-body System Dynamics Modeling of Wave-driven Underwater Vehicle Based on Kane Method [J]. Acta Armamentarii, 2016, 37(7): 1236-1244. |
| [9] | ZHANG Xiao-shi, WANG Cong, WEI Ying-jie, SUN Tie-zhi. Research on Collapse Characteristics of Ventilated Cavities around an Underwater Vehicle [J]. Acta Armamentarii, 2016, 37(12): 2324-2330. |
| [10] | ZHENG Ying, MA Da-wei, YAO Jian-yong, HU Jian. Linear Active Disturbance Rejection Control for Two-axis Coupling Position Servo System of Rocket Launcher [J]. Acta Armamentarii, 2015, 36(6): 987-993. |
| [11] | YANG PAN-pan, LIU Ming-yong, LEI Xiao-kang, WU Xiao-jin. Information Coupling Degree-based Fission Control Algorithm for Autonomous Underwater Vehicles withoutVelocity Measurements [J]. Acta Armamentarii, 2015, 36(5): 891-897. |
| [12] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming, HE Bin. AUV's Depth Control Based on Reconstructive Fault-tolerant Control [J]. Acta Armamentarii, 2015, 36(4): 723-730. |
| [13] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming. AUV’s Bottom Following Control Method Based on ADRC [J]. Acta Armamentarii, 2015, 36(10): 1943-1948. |
| [14] | MA Peng, ZHANG Fu-bin, XU De-min, LIU Shu-qiang. Observability Analysis of Cooperative Localization System for MAUV Based on Condition Number [J]. Acta Armamentarii, 2015, 36(1): 138-143. |
| [15] | ZHANG Fang-fang, ZHANG Zhen-shan, LIANG Wei-ge,WANG Zheng-li. Numerical Analysis on Thermal Characteristics of Underwater Stream Turbine in Non-Design Condition [J]. Acta Armamentarii, 2014, 35(9): 1466-1472. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||