
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3310-3319.doi: 10.12382/bgxb.2023.0963
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
LI Xianyan1, XU Wei2,3, JIANG Lei2,3, SUN Zeyuan2,3, XIE Qiang2,3, ZENG Yi2,3, ZHENG Dongdong1,2,3,*( )
)
Received:2023-09-22
Online:2023-11-14
Contact:
ZHENG Dongdong
CLC Number:
LI Xianyan, XU Wei, JIANG Lei, SUN Zeyuan, XIE Qiang, ZENG Yi, ZHENG Dongdong. Adaptive Prescribed Performance Control of Autonomous Vehicles with Input Saturation[J]. Acta Armamentarii, 2023, 44(11): 3310-3319.
Add to citation manager EndNote|Ris|BibTeX
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 1770 | Iz/(kg·m2) | 3059 |
| Caf/(N·rad-1) | 115000 | Car/(N·rad-1) | 115000 |
| A/m | 1.2 | b/m | 1.4 |
| KF/m | 10 | L/m | 5 |
| vx,min/(m·s-1) | 0.3 | vx,max/(m·s-1) | 30 |
Table 1 Vehicle parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 1770 | Iz/(kg·m2) | 3059 |
| Caf/(N·rad-1) | 115000 | Car/(N·rad-1) | 115000 |
| A/m | 1.2 | b/m | 1.4 |
| KF/m | 10 | L/m | 5 |
| vx,min/(m·s-1) | 0.3 | vx,max/(m·s-1) | 30 |
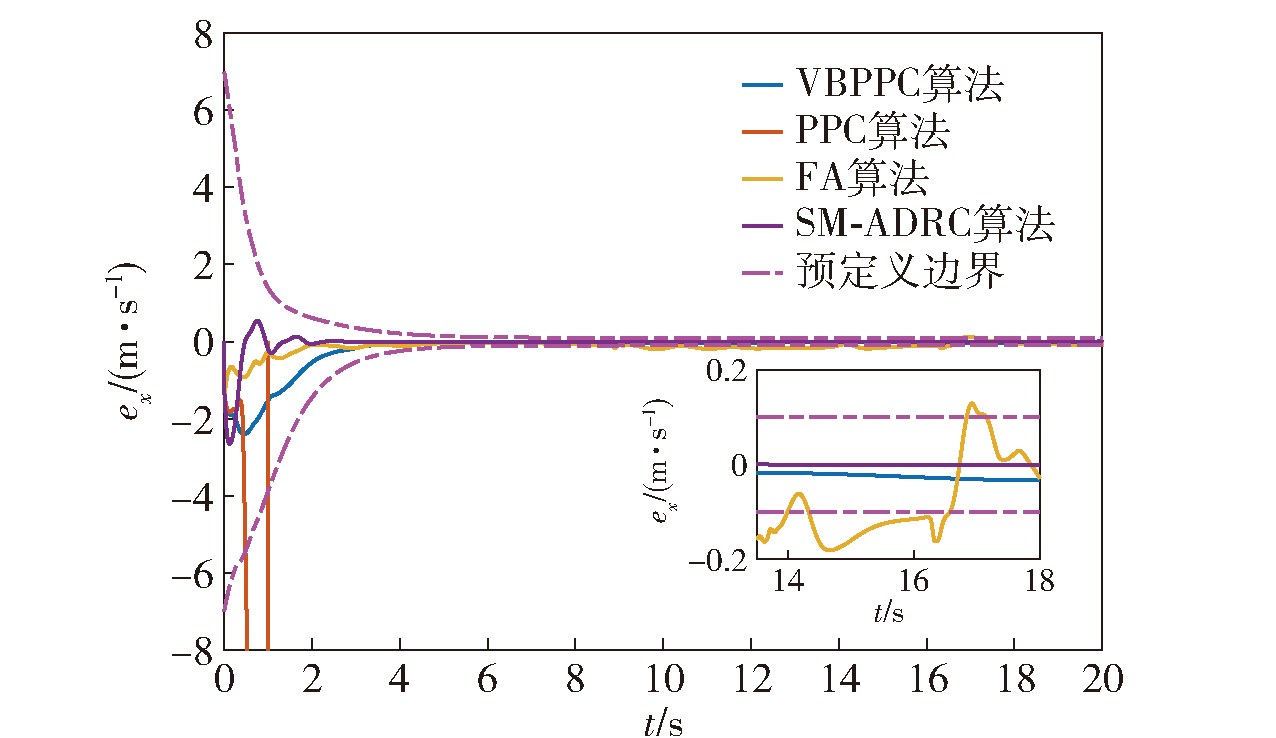
Fig.1 Longitudinal position error
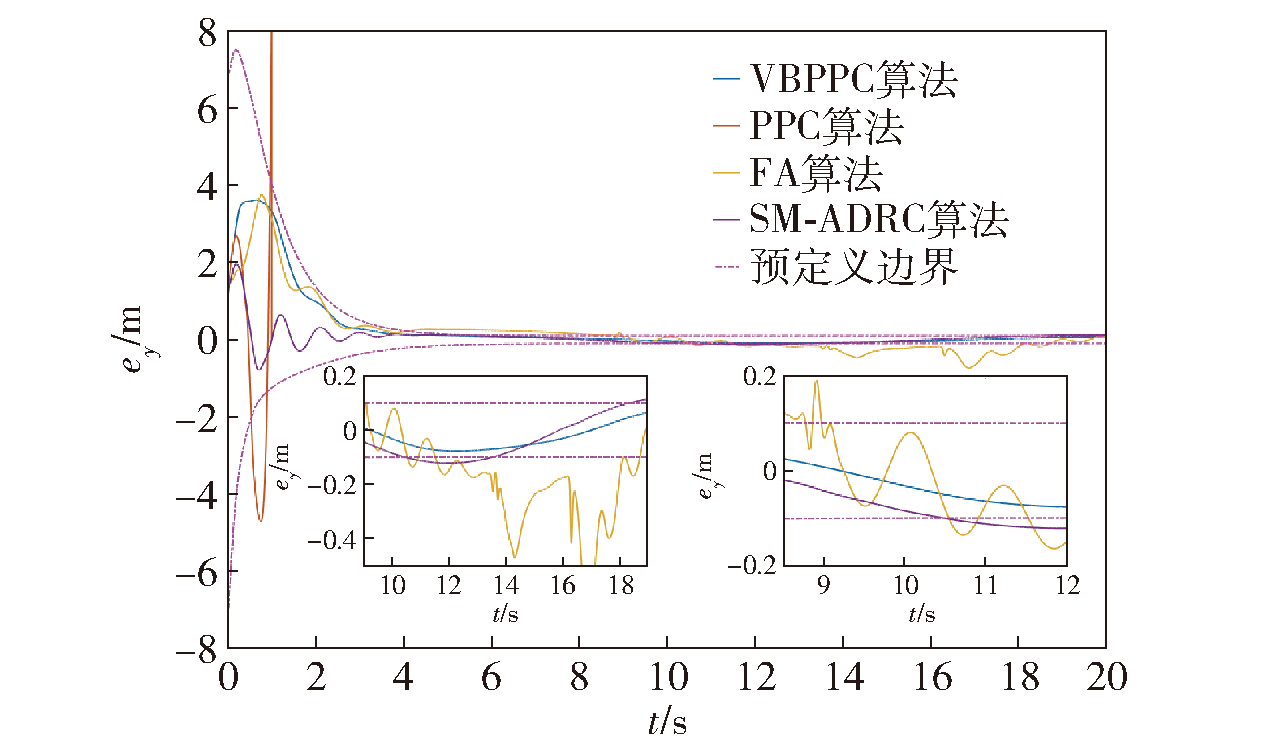
Fig.2 Lateral position error
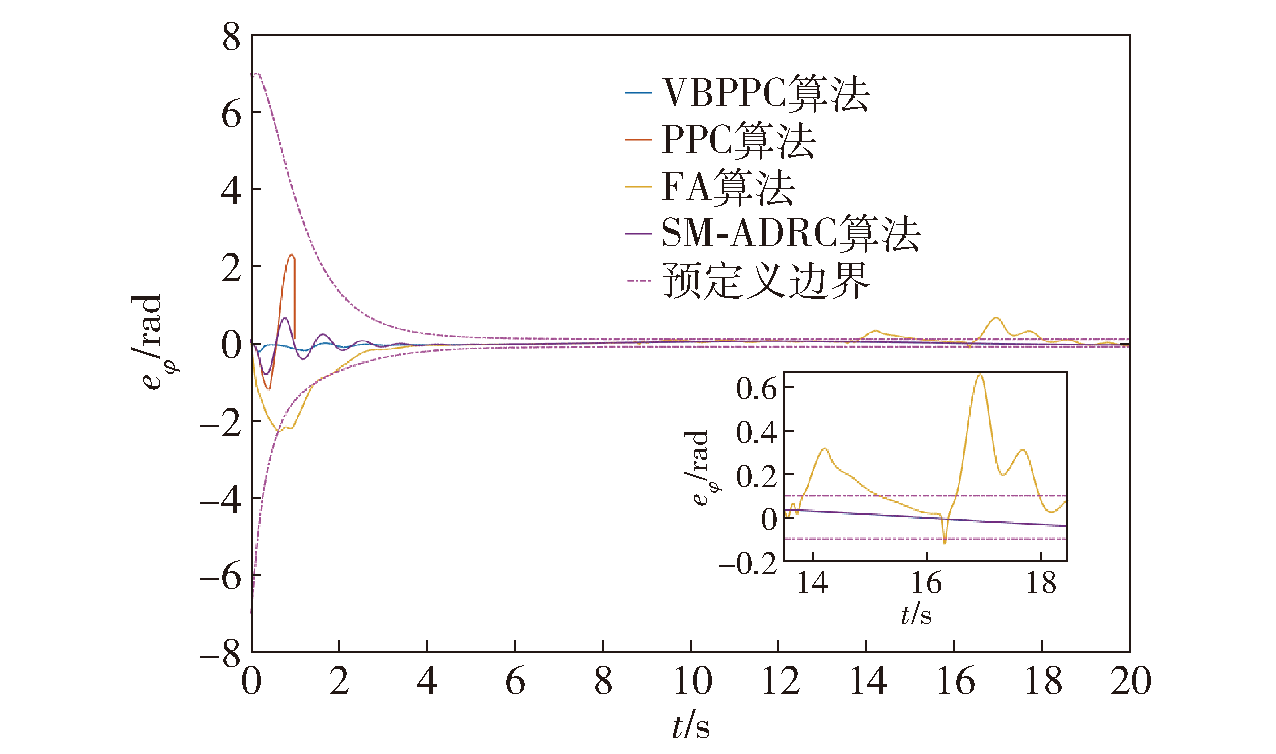
Fig.3 Yaw angle error
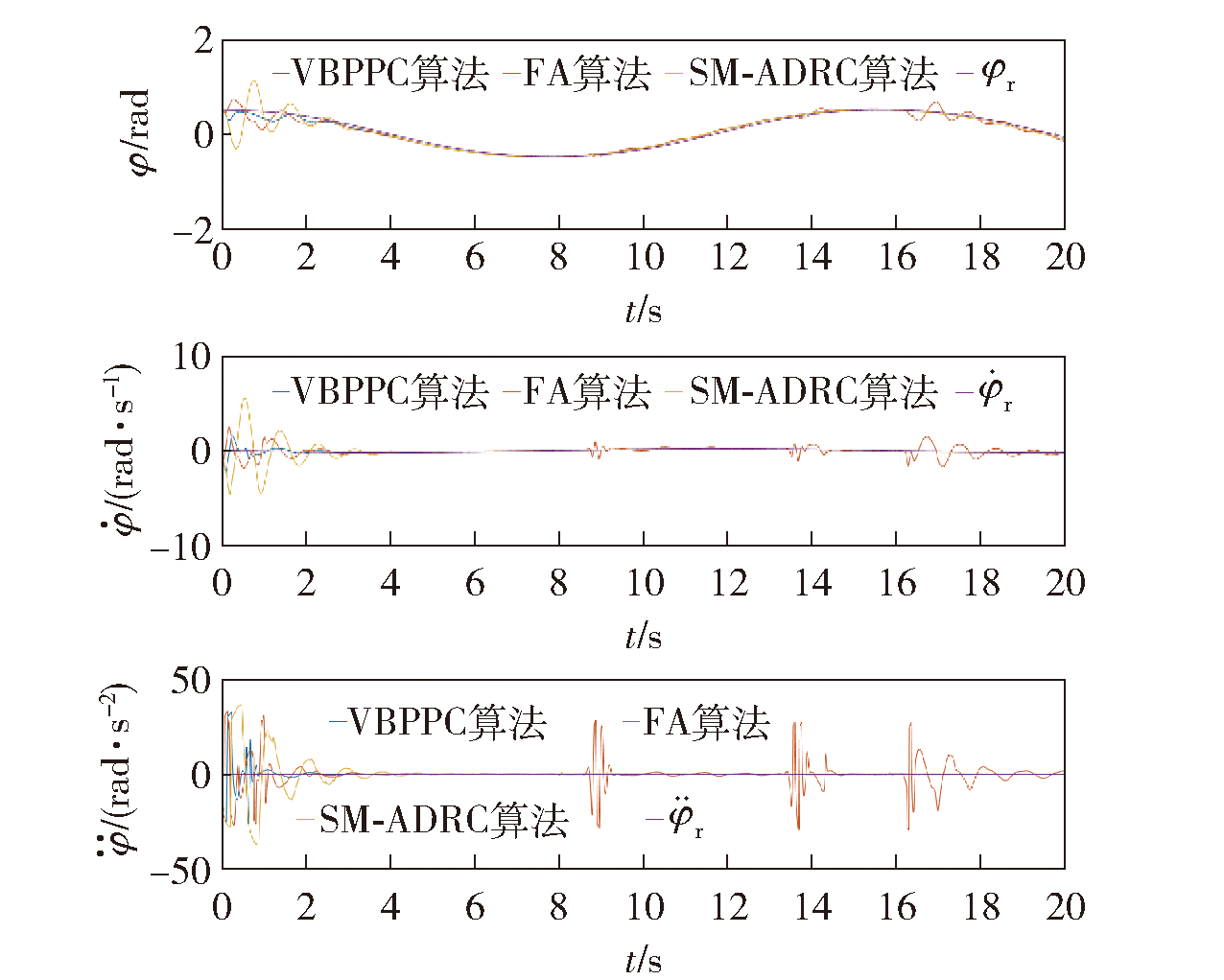
Fig.4 Yaw angle tracking
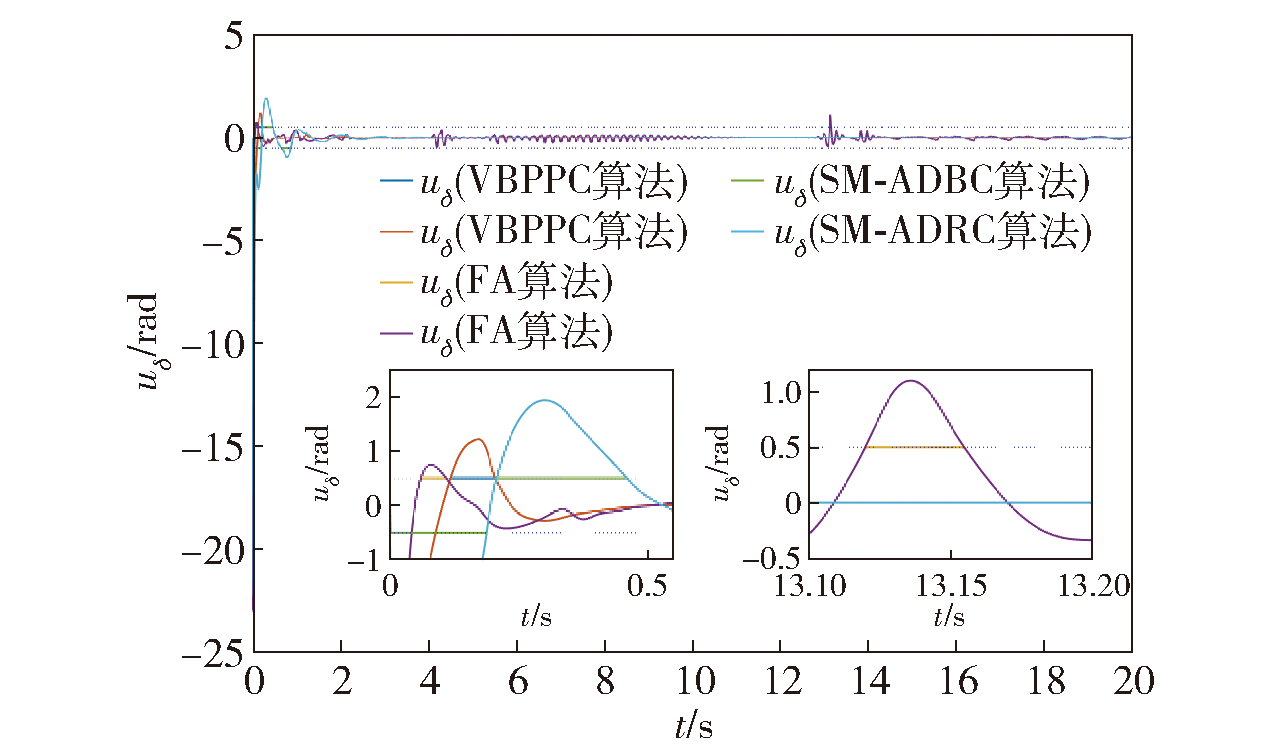
Fig.5 Control input (steering angle of front wheel)
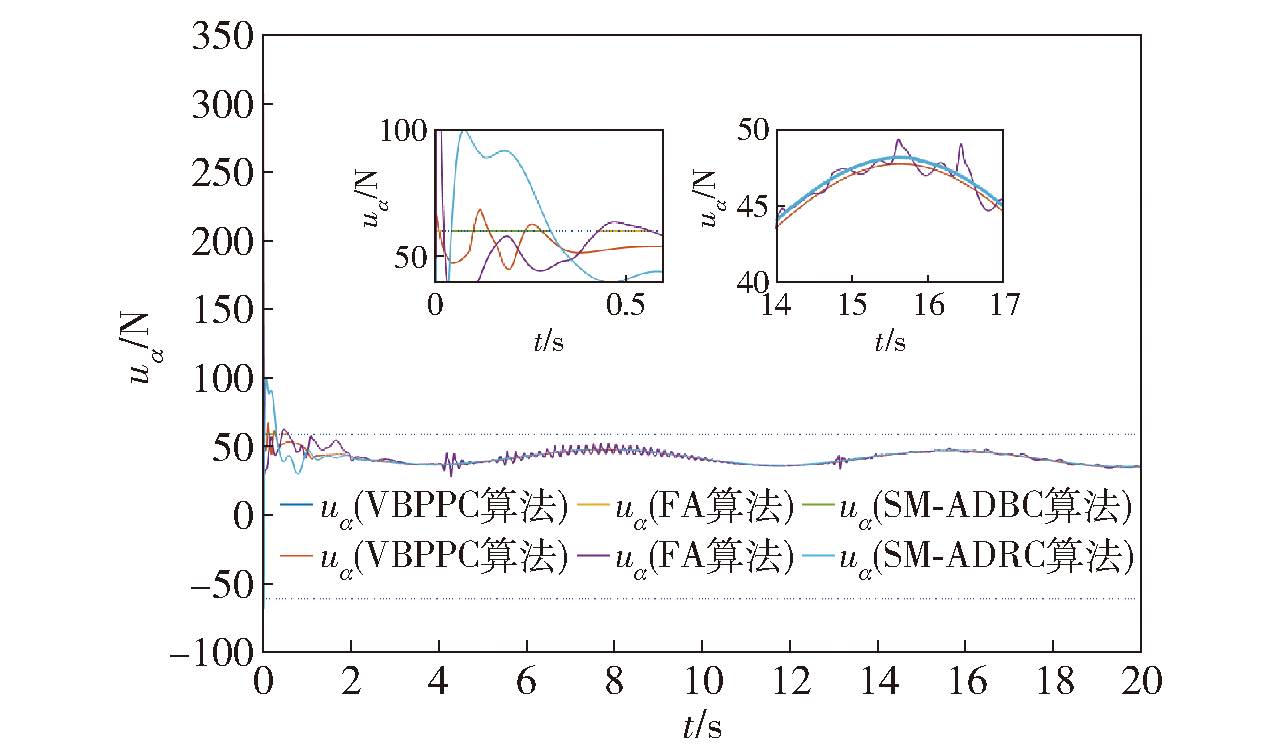
Fig.6 Control input (throttle/braking pedal force)
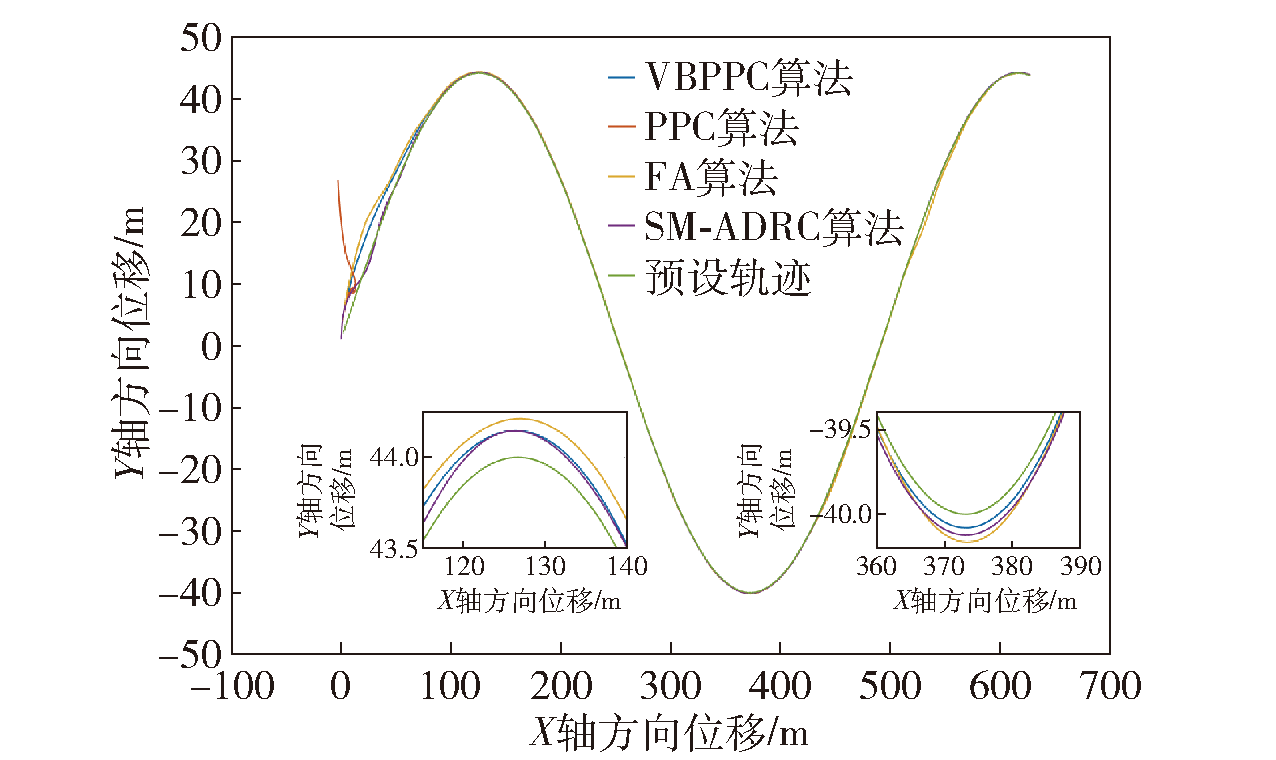
Fig.7 Tracking trajectory in geodetic coordinate systems
| [1] |
卢佳兴, 刘海鸥, 关海杰, 等. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971.
|
|
doi: 10.12382/bgxb.2022.0009 |
|
| [2] |
doi: 10.1080/00423114.2013.874563 URL |
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
陈特, 徐兴, 蔡英凤, 等. 基于状态估计的无人车前轮转角与横摆稳定协调控制[J]. 北京理工大学学报, 2021, 41(10): 1050-1057.
|
|
|
|
| [7] |
doi: 10.1109/TSMC.2017.2703921 URL |
| [8] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6):1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [9] |
|
| [10] |
doi: 10.1109/TSMC.2019.2950468 URL |
| [11] |
高振宇, 孙振超, 郭戈. 网联车辆有限时间滑模预设性能队列控制[J]. 控制理论与应用, 2023, 40(1): 1-11.
|
|
|
|
| [12] |
doi: 10.1016/j.conengprac.2017.09.002 URL |
| [13] |
何友国, 田肖肖, 袁朝春. 考虑输入饱和的车辆队列协同巡航控制算法[J]. 重庆理工大学学报(自然科学), 2020, 34(9): 47-55.
|
|
|
|
| [14] |
doi: 10.1002/acs.v37.4 URL |
| [15] |
doi: 10.1109/TITS.2023.3289439 URL |
| [16] |
doi: 10.1109/TFUZZ.2022.3217378 URL |
| [17] |
doi: 10.1016/j.isatra.2022.08.016 URL |
| [18] |
doi: 10.1109/TNNLS.2020.3017202 URL |
| [19] |
doi: 10.1002/rnc.v29.6 URL |
| [20] |
张守武, 王恒, 陈鹏, 等. 神经网络在无人驾驶车辆运动控制中的应用综述[J]. 工程科学学报, 2022, 44(2):235-243.
|
|
|
|
| [21] |
|
| [22] |
doi: 10.1016/j.jestch.2020.12.004 URL |
| [23] |
doi: 10.1108/IR-10-2020-0231 URL |
| [24] |
doi: 10.1109/TITS.6979 URL |
| [25] |
doi: 10.1049/itr2.v16.5 URL |
| [26] |
doi: 10.5194/ms-13-713-2022 URL |
| [27] |
doi: 10.1109/TITS.2020.2985124 URL |
| [28] |
doi: 10.1109/TIE.2021.3068672 URL |
| [29] |
孙志伟, 李聪. 基于径向基函数神经网络PID与模型预测控制的车辆轨迹跟踪控制[J]. 上海工程技术大学学报, 2022, 36(2):148-158.
|
|
|
|
| [30] |
doi: 10.1002/acs.v37.4 URL |
| [31] |
doi: 10.1007/s11071-019-05071-w |
| [32] |
doi: 10.1109/TAC.2008.929402 URL |
| [33] |
doi: 10.1016/j.automatica.2017.02.005 URL |
| [34] |
|
| [35] |
江梦洁, 李家旺, 吕艳芳, 等. 饱和输入限制下欠驱动自主水下航行器水平面航迹跟踪控制[J]. 兵工学报, 2017, 38(11): 2207-2213.
doi: 10.3969/j.issn.1000-1093.2017.11.017 |
|
|
|
| [36] |
doi: 10.1109/TCYB.2021.3091531 URL |
| [37] |
doi: 10.1109/TIE.41 URL |
| [38] |
吴艳, 王丽芳, 李芳. 基于滑模自抗扰的智能车路径跟踪控制[J]. 控制与决策, 2019, 34(10): 2150-2156.
|
|
|
| [1] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||