
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3320-3332.doi: 10.12382/bgxb.2023.0262
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
TAO Junfeng1, LIU Hai’ou1,*( ), GUAN Haijie1, CHEN Huiyan1, ZANG Zheng1,2
), GUAN Haijie1, CHEN Huiyan1, ZANG Zheng1,2
Received:2023-03-28
Online:2023-07-09
Contact:
LIU Hai’ou
CLC Number:
TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation[J]. Acta Armamentarii, 2023, 44(11): 3320-3332.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Framework of path planning of unmanned tracked vehicle based on terrain traversability estimation
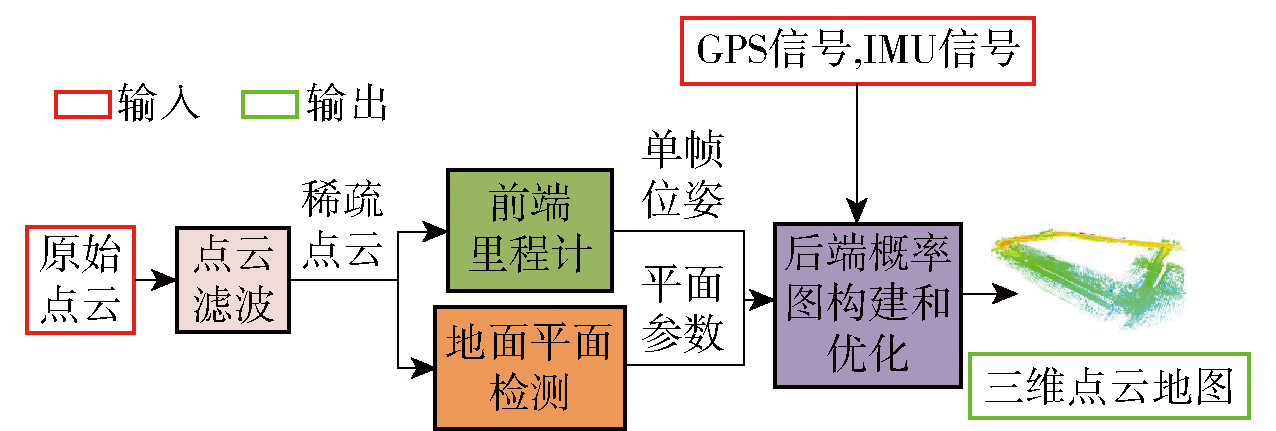
Fig.2 Framework of hdl-graph-slam
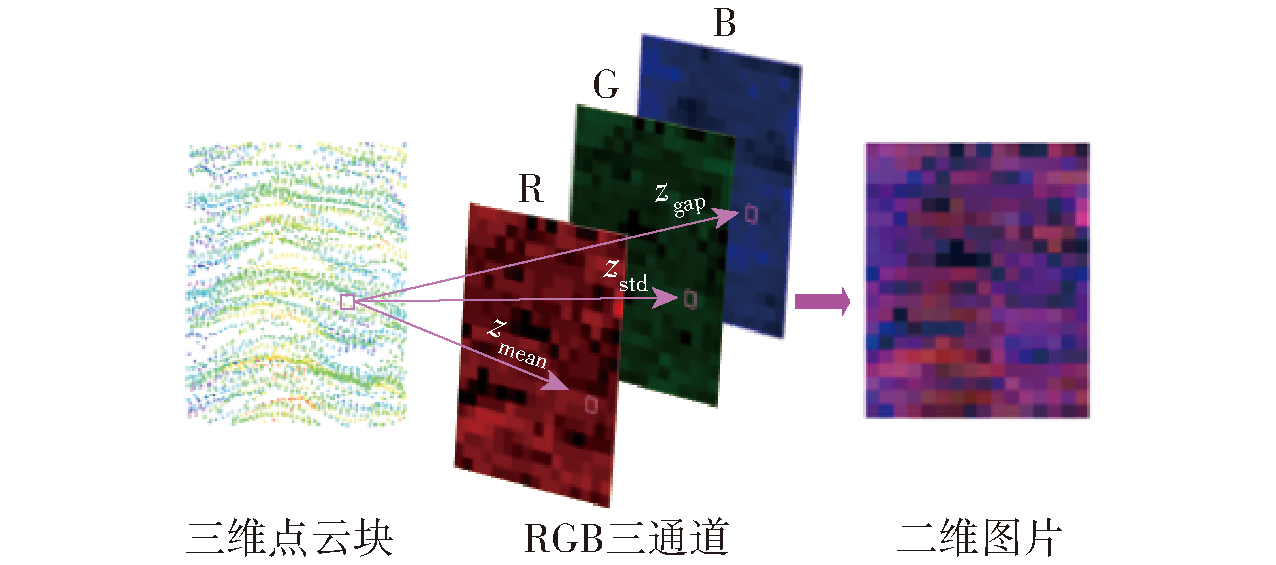
Fig.3 Transformation from 3D point cloud to 2D image
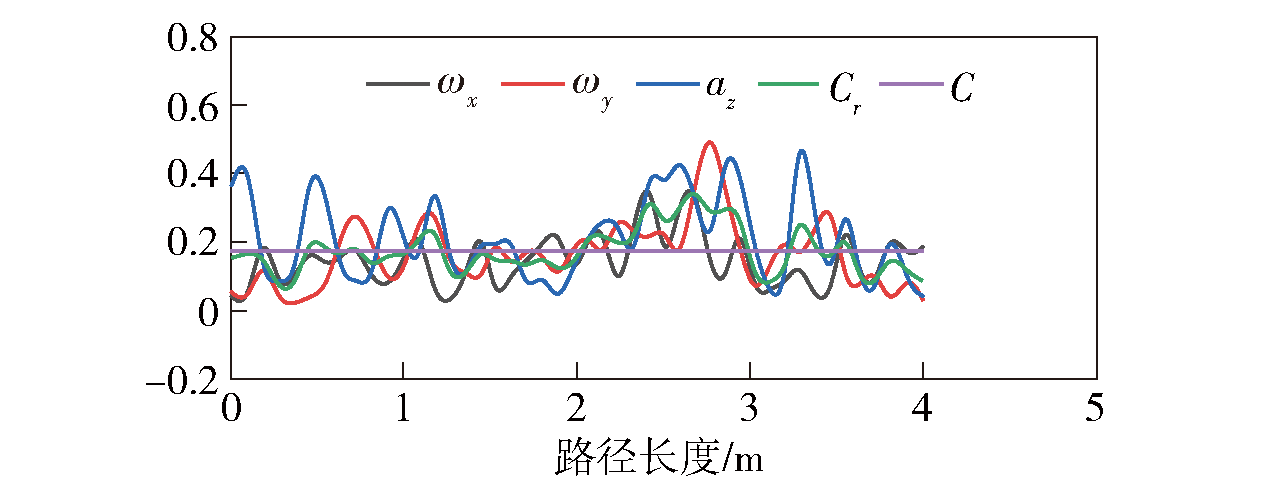
Fig.4 Diagram of IMU signal processing

Fig.5 Traversability estimation network

Fig.6 Improved A* search
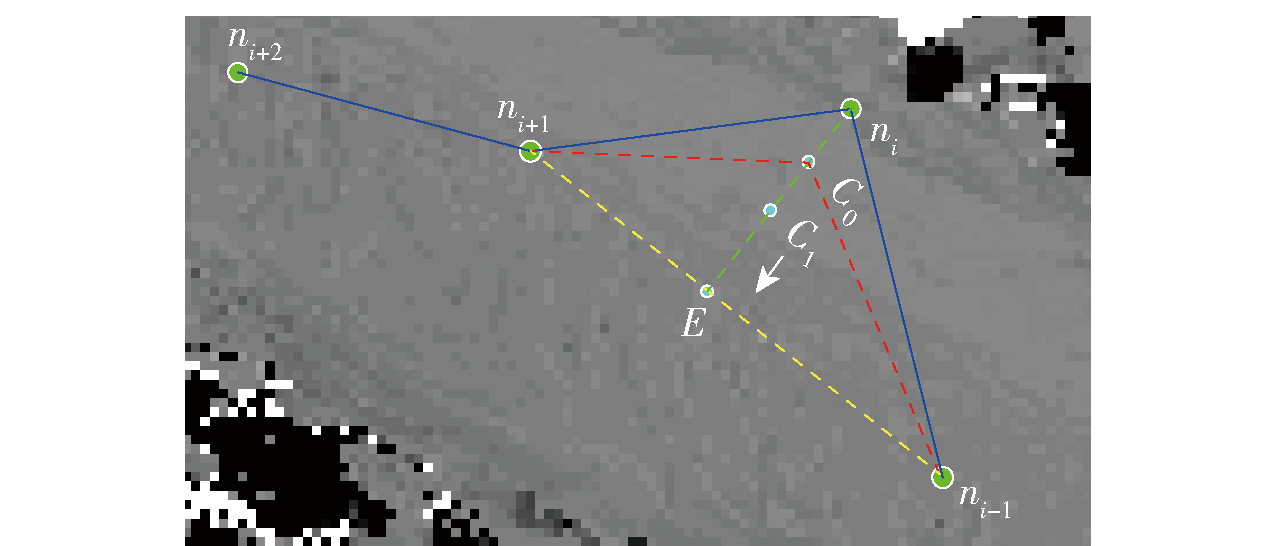
Fig.7 Schematic diagram of gradient-free iteration
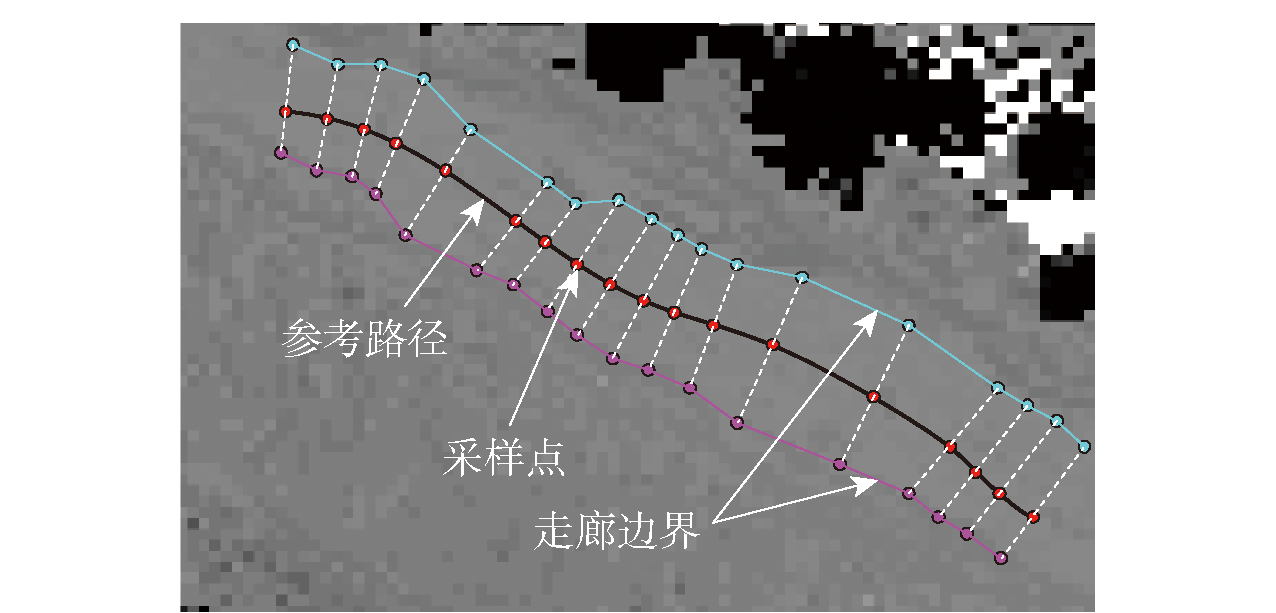
Fig.8 Construction of traversable corridor
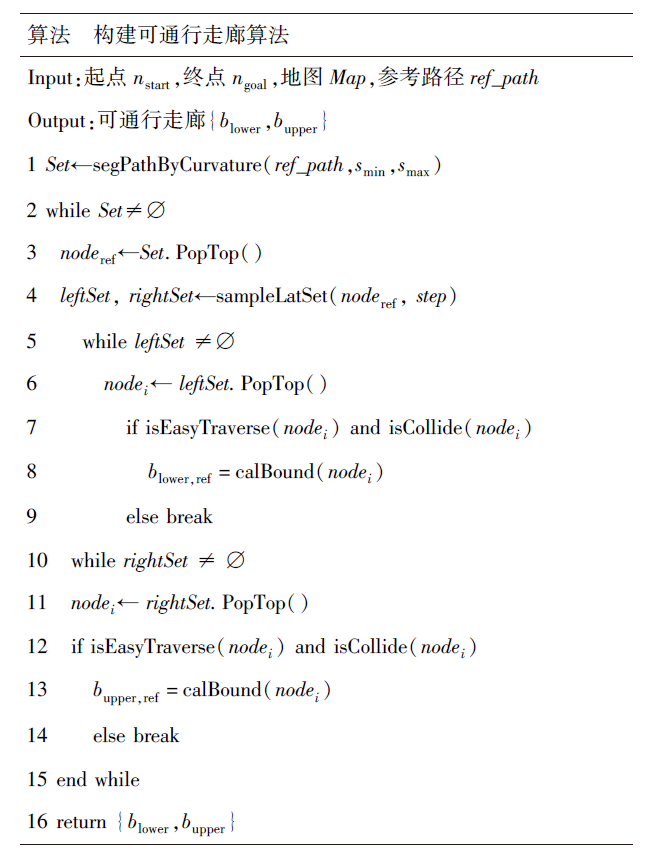
Fig.9 Pseudocode of traversable corridor
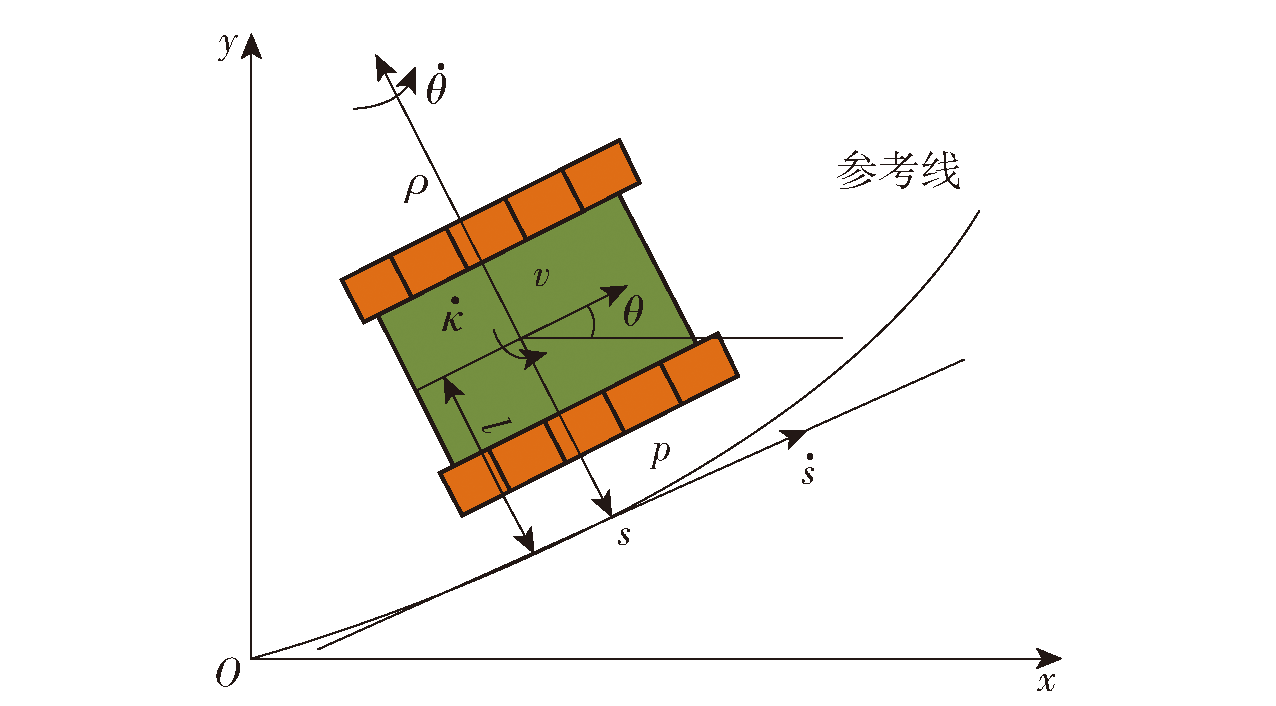
Fig.10 Vehicle kinematic model in Frenet coordinate system

Fig.11 Experimental vehicle and site
| 参数 | 数值 |
|---|---|
| 车辆行驶速度v/(km·h-1) | 5 |
| 节点扩展半径上界Rmax/m | 3 |
| 节点扩展半径下界Rmin/m | 1.2 |
| 无梯度迭代平滑thresh/m | 0.0001 |
| 自适应采样smin/m | 0.3 |
| 自适应采样smax/m | 5 |
| 自适应采样κm/m-1 | 0.02 |
| 自适应采样κM/m-1 | 0.2 |
| A*距离代价权重ωm | 10 |
| A*可通行度代价权重ωi | 0.1 |
| 无梯度平滑路径长度代价权重ωs | 10 |
| 无梯度平滑可通行度代价权重ωt | 0.1 |
| 横向采样步长step/m | 0.2 |
| 可通行走廊最大宽度bw/m | 4 |
| 参考线偏差代价权重ωd | 0.01 |
| 平滑性代价曲率项权重ωκ | 20 |
| 平滑性代价曲率变化率项权重ωμ | 100 |
| 终点状态横向位置允许偏差Δl/m | 0.2 |
| 终点状态航向角允许偏差Δθ/(°) | 5 |
| 曲率上界κmax | 0.2 |
| 曲率变化率上界κ'max | 0.05 |
| 可通行度检测pr | 0.5 |
Table 1 Experimental parameters
| 参数 | 数值 |
|---|---|
| 车辆行驶速度v/(km·h-1) | 5 |
| 节点扩展半径上界Rmax/m | 3 |
| 节点扩展半径下界Rmin/m | 1.2 |
| 无梯度迭代平滑thresh/m | 0.0001 |
| 自适应采样smin/m | 0.3 |
| 自适应采样smax/m | 5 |
| 自适应采样κm/m-1 | 0.02 |
| 自适应采样κM/m-1 | 0.2 |
| A*距离代价权重ωm | 10 |
| A*可通行度代价权重ωi | 0.1 |
| 无梯度平滑路径长度代价权重ωs | 10 |
| 无梯度平滑可通行度代价权重ωt | 0.1 |
| 横向采样步长step/m | 0.2 |
| 可通行走廊最大宽度bw/m | 4 |
| 参考线偏差代价权重ωd | 0.01 |
| 平滑性代价曲率项权重ωκ | 20 |
| 平滑性代价曲率变化率项权重ωμ | 100 |
| 终点状态横向位置允许偏差Δl/m | 0.2 |
| 终点状态航向角允许偏差Δθ/(°) | 5 |
| 曲率上界κmax | 0.2 |
| 曲率变化率上界κ'max | 0.05 |
| 可通行度检测pr | 0.5 |
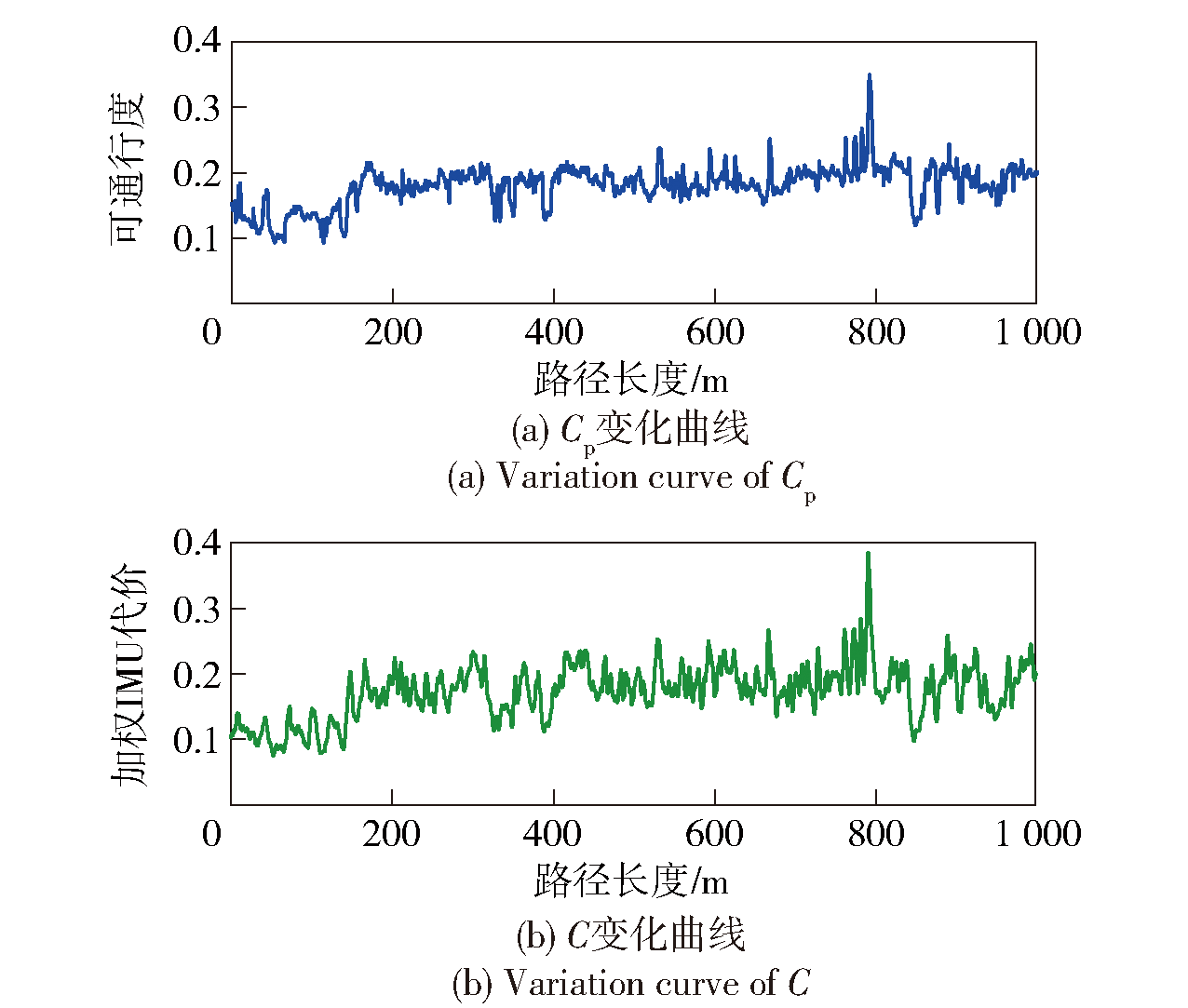
Fig.12 Changes in Cp/C with s

Fig.13 Traversability cost map based on Cp
| MSE | MAE | RMSE | R |
|---|---|---|---|
| 0.0005 | 0.0197 | 0.0236 | 0.8450 |
Table 2 Statistical parameters of Cp and C
| MSE | MAE | RMSE | R |
|---|---|---|---|
| 0.0005 | 0.0197 | 0.0236 | 0.8450 |

Fig.14 Traversability cost map based on grid height difference

Fig.15 Real time shots of experimental sites

Fig.16 Self comparison of C1 with reference paths

Fig.17 Self omparison of C1 with traversable orridor and optimized results
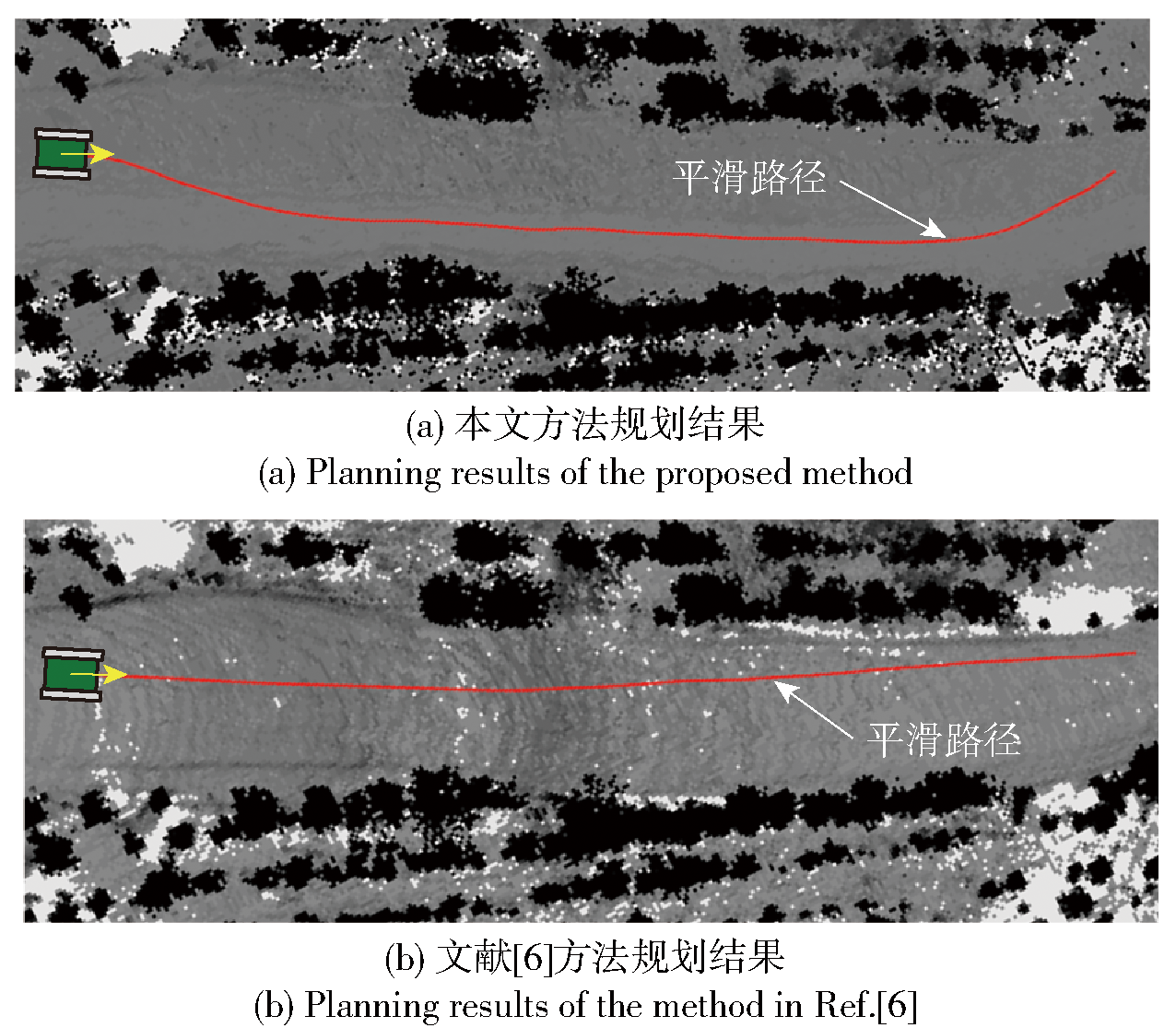
Fig.18 Comparison of C2 with planning results

Fig.19 Change curves of pitch and roll angles (in this article)
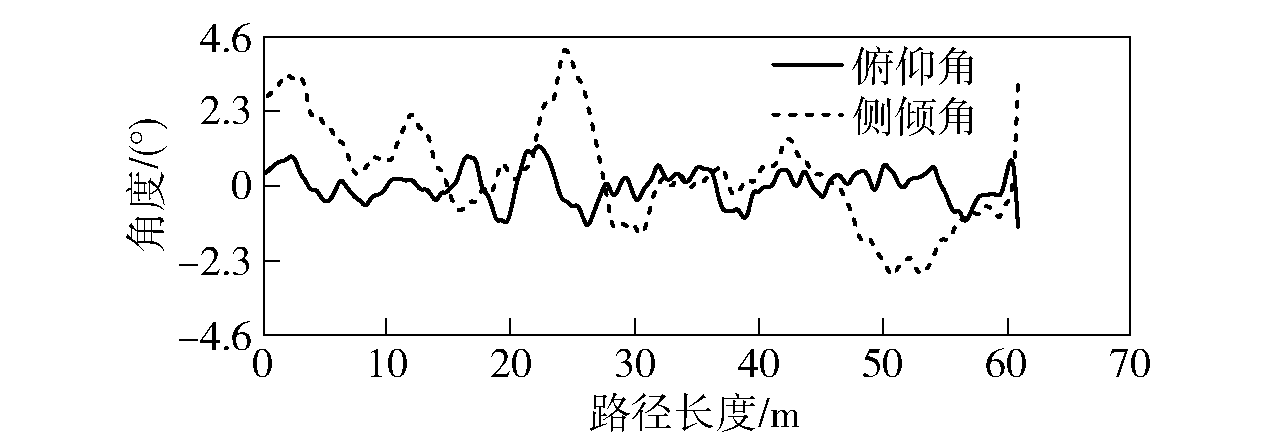
Fig.20 Change curves of pitch and roll angles (Ref.[6] method)
| 规划方法 | 时间/ ms | 平均俯仰角/ ((°)·m-1) | 平均侧倾角/ ((°)·m-1)) | 平均曲率/ m-1 |
|---|---|---|---|---|
| 本文方法 | 65 | 0.4942 | 1.0089 | 0.0332 |
| 文献[6]方法 | 105 | 2.4772 | 3.3869 | 0.0283 |
Table 3 Comparison of planned route indicators of C2
| 规划方法 | 时间/ ms | 平均俯仰角/ ((°)·m-1) | 平均侧倾角/ ((°)·m-1)) | 平均曲率/ m-1 |
|---|---|---|---|---|
| 本文方法 | 65 | 0.4942 | 1.0089 | 0.0332 |
| 文献[6]方法 | 105 | 2.4772 | 3.3869 | 0.0283 |
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10): 1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
doi: 10.1109/TITS.6979 URL |
| [3] |
doi: 10.1002/rob.v26:4 URL |
| [4] |
|
| [5] |
|
| [6] |
doi: 10.1109/LSP.2016. URL |
| [7] |
|
| [8] |
doi: 10.17531/ein URL |
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
袁夏, 赵春霞. 一种激光雷达可通行区域提取算法[J]. 兵工学报, 2010, 31(12): 1702-1707.
|
|
|
|
| [13] |
doi: 10.3390/s19112577 URL |
| [14] |
黄庭鸿, 聂卓赟, 王庆国, 等. 基于区块自适应特征融合的图像实时语义分割[J]. 自动化学报, 2021, 47(5): 1137-1148.
|
|
|
|
| [15] |
刘忠泽, 陈慧岩, 崔星, 等. 无人平台越野环境下同步定位与地图创建[J]. 兵工学报, 2019, 40(12): 2399-2406.
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.12.002 |
|
| [16] |
彭晓燕, 谢浩, 黄晶. 无人驾驶汽车局部路径规划算法研究[J]. 汽车工程, 2020, 42(1):1-10.
|
|
|
|
| [17] |
周孝添, 任宏斌, 苏波, 等. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405.
doi: 10.12382/bgxb.2021.0756 |
|
doi: 10.12382/bgxb.2021.0756 |
|
| [18] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [19] |
doi: 10.1016/j.ymssp.2015.10.021 URL |
| [20] |
|
| [21] |
刘龙龙, 陈慧岩, 刘海鸥, 等. 基于拓扑路网的多挡无人履带平台路径重规划[J]. 兵工学报, 2023, 44(1): 279-289.
doi: 10.12382/bgxb.2021.0827 |
|
doi: 10.12382/bgxb.2021.0827 |
|
| [22] |
王博洋, 关海杰, 龚建伟, 等. 面向异构履带车辆的统一运动规划方法[J]. 兵工学报, 2022, 43(2): 241-251.
|
|
doi: 10.3969/j.issn.1000-1093.2022.02.001 |
|
| [23] |
田洪清, 王建强, 黄荷叶, 等. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7): 1496-1505.
|
|
|
|
| [24] |
|
| [25] |
|
| [26] |
doi: 10.1007/s12532-020-00179-2 |
| [1] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [2] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [3] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [4] | LIU Jia, LIU Hai’ou, CHEN Huiyan, MAO Feihong. Road Types Identification Method of Unmanned Tracked Vehicles Based on Fusion Features [J]. Acta Armamentarii, 2023, 44(5): 1267-1276. |
| [5] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [6] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [7] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [8] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [9] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [10] | ZHANG Lei, FANG Yang-wang, CHAI Dong, YONG Xiao-ju. Cruise Missile Path Planning Based on Improved Quantum Evolutionary Algorithm [J]. Acta Armamentarii, 2014, 35(11): 1820-1827. |
| [11] | FU Yang-guang, ZHOU Cheng-ping2, HU Han-ping2. Research on Differential Evolution Algorithm for Path Planning for Unmanned Aerial Vehicle inOcean Environment [J]. Acta Armamentarii, 2012, 33(3): 295-300. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||