
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (2): 240178-.doi: 10.12382/bgxb.2024.0178
Previous Articles Next Articles
REN Jie, JIANG Haiyan*( ), JI Jianrong
), JI Jianrong
Received:2024-03-12
Online:2025-02-28
Contact:
JIANG Haiyan
CLC Number:
REN Jie, JIANG Haiyan, JI Jianrong. A Point Cloud Splicing Method of Rectangular Fragment Interception Target Based on Euclidean Space Transformation[J]. Acta Armamentarii, 2025, 46(2): 240178-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Time of flight method

Fig.2 Acquisition of target point cloud by laser scanning

Fig.3 Point clouds of rectangular fragment interception target

Fig.4 Rotation angles αi and γi
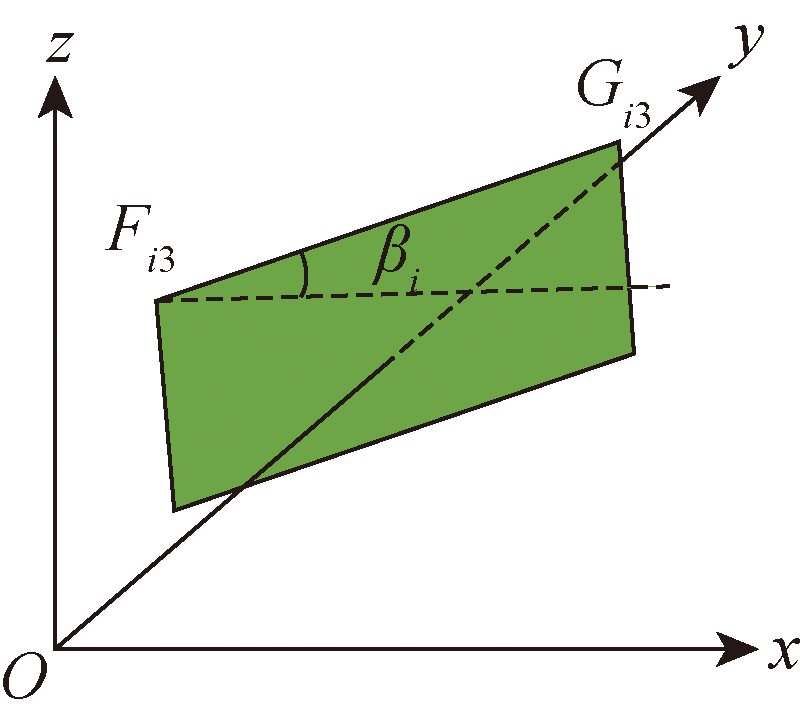
Fig.5 Rotation angle βi

Fig.6 Effect of adjusting the angular posture

Fig.7 Effect of overall splicing

Fig.8 Flowchart of target point cloud data processing

Fig.9 Rectangular fragment interception target

Fig.10 The position of warhead and fragment interception target

Fig.11 Acquisition of target point clouds by laser scanner

Fig.12 Local target point clouds

Fig.13 Angular posture of local target point clouds
| i | Fi/m | Gi/m | Ii/m | ni/m | αi/rad | γi/rad | βi/rad | Ri | ti/m |
|---|---|---|---|---|---|---|---|---|---|
| 1 | (6.213, 5.306, 151.789) | (8.823, -4.303, 152.273) | (8.400, -4.603, 149.360) | (28.136, 7.398, -4.848) | -0.580 | 1.314 | -0.510 | (-25.671, 0, 0) | |
| 2 | (6.952, -2.174, 152.653) | (-5.012, -2.960, 153.996) | (-5.268, -3.813, 151.219) | (3.329, -33.571, 10.007) | -0.290 | -0.099 | 0.088 | (-22.500, -31.720, 5.978) | |
| 3 | (3.901, -6.698, 153.523) | (-0.098, 4.301, 154.942) | (-0.637, 4.433, 152.113) | (-31.303, -12.078, 5.402) | -0.421 | 1.203 | 0.513 | (-10.326, -6.694, -0.615) | |
| 4 | (1.365, -6.849, 156.680) | (-5.528, -3.143, 156.741) | (-5.417, -2.876, 153.757) | (-11.075, -20.560, -2.249) | 0.109 | 0.494 | -0.044 | (21.435, 11.228, -5.211) |
Table 1 Point cloud data calculation parameters
| i | Fi/m | Gi/m | Ii/m | ni/m | αi/rad | γi/rad | βi/rad | Ri | ti/m |
|---|---|---|---|---|---|---|---|---|---|
| 1 | (6.213, 5.306, 151.789) | (8.823, -4.303, 152.273) | (8.400, -4.603, 149.360) | (28.136, 7.398, -4.848) | -0.580 | 1.314 | -0.510 | (-25.671, 0, 0) | |
| 2 | (6.952, -2.174, 152.653) | (-5.012, -2.960, 153.996) | (-5.268, -3.813, 151.219) | (3.329, -33.571, 10.007) | -0.290 | -0.099 | 0.088 | (-22.500, -31.720, 5.978) | |
| 3 | (3.901, -6.698, 153.523) | (-0.098, 4.301, 154.942) | (-0.637, 4.433, 152.113) | (-31.303, -12.078, 5.402) | -0.421 | 1.203 | 0.513 | (-10.326, -6.694, -0.615) | |
| 4 | (1.365, -6.849, 156.680) | (-5.528, -3.143, 156.741) | (-5.417, -2.876, 153.757) | (-11.075, -20.560, -2.249) | 0.109 | 0.494 | -0.044 | (21.435, 11.228, -5.211) |

Fig.14 Rotation transformation

Fig.15 Overall splicing effect of target array
| i | 包含点数 | 欧式变换用时/s |
|---|---|---|
| 1 | 6638258 | 0.180 |
| 2 | 10927116 | 0.297 |
| 3 | 9849981 | 0.292 |
| 4 | 7042787 | 0.242 |
Table 2 Time of local point cloud euclidean transformation
| i | 包含点数 | 欧式变换用时/s |
|---|---|---|
| 1 | 6638258 | 0.180 |
| 2 | 10927116 | 0.297 |
| 3 | 9849981 | 0.292 |
| 4 | 7042787 | 0.242 |
| i | Fi/m | Gi/m | Ii/m | 高度/m | 长度/m |
|---|---|---|---|---|---|
| 1 | (6.213,5.306,151.789) | (8.823,-4.303,152.273) | (8.400,-4.603,149.360) | 2.959 | 9.969 |
| 2 | (6.952,-2.174,152.653) | (-5.012,-2.960,153.996) | (-5.268,-3.813,151.219) | 2.917 | 12.065 |
| 3 | (3.901,-6.698,153.523) | (-0.098,4.301,154.942) | (-0.637,4.433,152.113) | 2.883 | 11.789 |
| 4 | (1.365,-6.849,156.680) | (-5.528,-3.143,156.741) | (-5.417,-2.876,153.757) | 2.998 | 7.827 |
Table 3 Calculation parameters about the size of target point cloud before splicing
| i | Fi/m | Gi/m | Ii/m | 高度/m | 长度/m |
|---|---|---|---|---|---|
| 1 | (6.213,5.306,151.789) | (8.823,-4.303,152.273) | (8.400,-4.603,149.360) | 2.959 | 9.969 |
| 2 | (6.952,-2.174,152.653) | (-5.012,-2.960,153.996) | (-5.268,-3.813,151.219) | 2.917 | 12.065 |
| 3 | (3.901,-6.698,153.523) | (-0.098,4.301,154.942) | (-0.637,4.433,152.113) | 2.883 | 11.789 |
| 4 | (1.365,-6.849,156.680) | (-5.528,-3.143,156.741) | (-5.417,-2.876,153.757) | 2.998 | 7.827 |
| i | F″i/m | G″i/m | I″i/m | 高度/m | 长度/m | 高度相对 误差/% | 长度相对 误差/% |
|---|---|---|---|---|---|---|---|
| 1 | (-11.652,4.471,151.295) | (-12.065,14.432,151.295) | (-11.998,14.472,148.337) | 2.959 | 9.969 | 1.376 | 0.308 |
| 2 | (-12.065,14.432,151.295) | (0,14.383,151.295) | (0,14.382,148.378) | 2.917 | 12.065 | 2.779 | 0.539 |
| 3 | (0,14.432,151.295) | (11.785,14.757,151.295) | (11.750,14.801,148.412) | 2.883 | 11.789 | 3.905 | 1.757 |
| 4 | (11.785,14.432,151.295) | (11.804,6.605,151.295) | (11.804,6.600,148.297) | 2.998 | 7.827 | 0.081 | 2.165 |
Table 4 Calculation parameters about the size of target point cloud after splicing
| i | F″i/m | G″i/m | I″i/m | 高度/m | 长度/m | 高度相对 误差/% | 长度相对 误差/% |
|---|---|---|---|---|---|---|---|
| 1 | (-11.652,4.471,151.295) | (-12.065,14.432,151.295) | (-11.998,14.472,148.337) | 2.959 | 9.969 | 1.376 | 0.308 |
| 2 | (-12.065,14.432,151.295) | (0,14.383,151.295) | (0,14.382,148.378) | 2.917 | 12.065 | 2.779 | 0.539 |
| 3 | (0,14.432,151.295) | (11.785,14.757,151.295) | (11.750,14.801,148.412) | 2.883 | 11.789 | 3.905 | 1.757 |
| 4 | (11.785,14.432,151.295) | (11.804,6.605,151.295) | (11.804,6.600,148.297) | 2.998 | 7.827 | 0.081 | 2.165 |
| [1] |
刘佳畅, 黄艳, 贾亚青, 等. 现代光学三维扫描仪工作原理及技术现状综述[J]. 激光杂志, 2023, 44(7):21-26.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
陶俊峰, 刘海鸥, 关海杰, 等. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11):3320-3332.
doi: 10.12382/bgxb.2023.0262 |
|
doi: 10.12382/bgxb.2023.0262 |
|
| [6] |
霍健, 陈慧敏, 马云飞, 等. 基于MEMS激光雷达的车辆目标识别算法[J]. 兵工学报, 2023, 44(4):940-948.
|
|
doi: 10.12382/bgxb.2021.0822 |
|
| [7] |
|
| [8] |
|
| [9] |
姜金佐, 徐翔云, 任王军, 等. 战斗部动态爆炸破片威力场综述[J]. 兵工学报, 2023, 44(增刊1):1-8.
|
|
doi: 10.12382/bgxb.2023.0715 |
|
| [10] |
|
| [11] |
|
| [12] |
葛超, 王晋, 郑元枫, 等. 线性聚焦式杀伤战斗部设计及破片飞散特性[J]. 北京理工大学学报, 2022, 42(12):1219-1228.
|
|
|
|
| [13] |
|
| [14] |
何性顺, 苏健军, 段奇三. 基于TLS的靶板穿孔特征识别提取方法[J]. 兵器装备工程学报, 2021, 42(1):249-253.
|
|
|
|
| [15] |
|
| [16] |
刘今越, 翟志国, 贾晓辉, 等. 基于面结构光的工件内壁点云旋转拼接研究[J]. 红外与激光工程, 2022, 51(9):277-283.
|
|
|
|
| [17] |
任栋宇, 李晓娟, 林涛, 等. 基于Kinect v2传感器的果树枝干三维重建方法[J]. 农业机械学报, 2022, 53(增刊2):197-203.
|
|
|
|
| [18] |
魏加立, 曲慧东, 王永宪, 等. 基于飞行时间法的3D相机研究综述[J]. 红外技术, 2021, 43(1):60-67.
|
|
|
|
| [19] |
|
| [20] |
冯田, 冯志辉, 南亚明, 等. 基于激光雷达的非合作航天器姿态测量[J]. 传感器与微系统, 2024, 43(2):139-142,147.
|
|
|
|
| [21] |
|
| [22] |
|
| [1] | ZHANG Xiaodong, SUN Jun, FU Shenghua, LOU Wenzhong, LI Chubao. Test Method for Evaluating FAE Fuel Concentration Distribution Based on Ultrasonic Array [J]. Acta Armamentarii, 2022, 43(11): 2785-2790. |
| [2] | LIU Han, ZHAO Yao, GUO Zhiwei, FENG Shunshan, HUANG Guangyan. Performance of Explosive-proof Equipment in Protecting Against High-level TNT Explosion Sound [J]. Acta Armamentarii, 2022, 43(9): 2058-2074. |
| [3] | XUE Dong, LIU Jin, WANG Huan, YIN Jintao, JIANG Chunmao, YUAN Xianshi. Design of Dynamic Derivative Test System for Projectile/rocket Model in High-speed Wind Tunnel [J]. Acta Armamentarii, 2021, 42(11): 2522-2530. |
| [4] | CHEN Zhi-chuang, LI Wei-bing, ZHU Jian-jun, WANG Xiao-ming, LI Wen-bin. Recovery Experiment Study of Cylindrical 40CrMnSiB Steel Shell in Intermediate Phase of Expanding Fracture Processes [J]. Acta Armamentarii, 2018, 39(11): 2137-2144. |
| [5] | KE Wen, CHEN Hua-liang, ZHANG Zhi-wei, MA Lin, MEN Li-juan , WANG Feng-dan. Experimental Study of Shock Wave in the Simulated Armored Cabin under the Action of Shaped Charge Jet [J]. Acta Armamentarii, 2017, 38(2): 407-411. |
| [6] | ZHANG Xian-pi, LIU Jian-hu, PAN Jian-qiang, MAO Hai-bin, ZHANG Jing, CHEN Xue-bing. An Evaluation Method for Near-field Underwater Explosion Power Based on Effect Target [J]. Acta Armamentarii, 2016, 37(8): 1430-1435. |
| [7] | GUO Hao, FENG Jin-liang, ZHANG Yao-yu, CAI Cun-liang, LI Si-qi. High Precision Measurement of Cartridge Volume [J]. Acta Armamentarii, 2015, 36(4): 758-762. |
| [8] | LYU Ning, XU Geng-guang. Inspection of Base separation of Charge by Industrial CT Imaging [J]. Acta Armamentarii, 2015, 36(1): 157-162. |
| [9] | LYU Ning, XU Geng-guang, XUE Tian, HUANG Qiu-an. Quantitative Inspection of Ammunition Density by Industrial CT Imaging [J]. Acta Armamentarii, 2014, 35(12): 1978-1982. |
| [10] | LIU Han, ZHAI Xinyi, YANG Lei, WANG Zhiyuan, HUANG Guangyan. Protection Performance of Typical Explosion-proof Equipment Against Explosion Seismic Wave [J]. Acta Armamentarii, 0, (): 0-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||