
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (3): 718-727.doi: 10.12382/bgxb.2021.0450
Previous Articles Next Articles
SUN Hao( ), SUN Qinglin(), SUN Mingwei(), CHEN Zengqiang()
), SUN Qinglin(), SUN Mingwei(), CHEN Zengqiang()
Received:2022-05-12
Online:2022-06-20
Contact:
SUN Qinglin
SUN Hao, SUN Qinglin, SUN Mingwei, CHEN Zengqiang. Parafoil-based UAV Recovery System Under Random Initial Conditions[J]. Acta Armamentarii, 2023, 44(3): 718-727.
Add to citation manager EndNote|Ris|BibTeX

Fig. 1 Schematic diagram of the parafoil recovery system

Fig. 2 Active disturbance rejection controller

Fig. 3 Embedded controller and parafoil recovery system

Fig.4 Homing control process

Fig. 5 Model verification
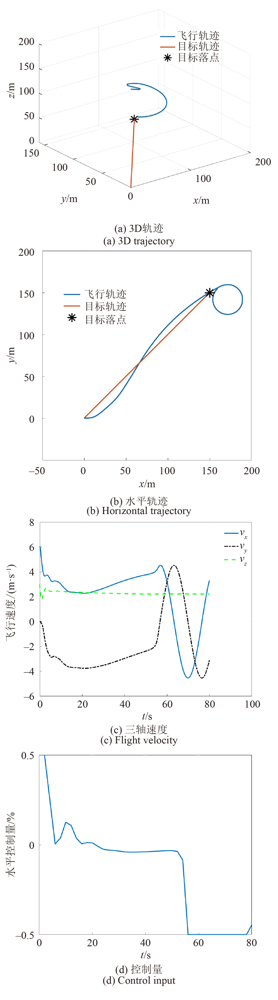
Fig. 6 Simulation case 1

Fig. 7 Simulation case 2

Fig. 8 Simulation case 3

Fig. 9 Simulation case 4
| 编号 | 初始高度 | 初始误差 | 着陆误差 | |
|---|---|---|---|---|
| 20201114-1 | 90.4 | 100.3 | 22.5 | |
| 20201114-2 | 119.7 | 195.2 | 28.1 | |
| 20201114-3 | 130.4 | 101.3 | 24.5 | |
| 20201115-1 | 80.1 | 133.4 | 27.4 | |
| 20201115-2 | 125.8 | 198.9 | 18.9 | |
| 20201115-3 | 116.3 | 210.6 | 42.5 | |
| 20201115-4 | 102.2 | 187.0 | 11.6 | |
| 20201115-5 | 111.2 | 211.4 | 24.7 | |
| 20201115-6 | 58.8 | 152.5 | 8.5 | |
| 20201115-7 | 84.1 | 229.3 | 19.5 | |
| 20201115-8 | 75.2 | 231.9 | 19.3 | |
| 20201115-9 | 107.2 | 269.8 | 16.6 | |
| 20201116-1 | 286.1 | 239.5 | 33.5 | |
| 20201116-2 | 210.7 | 247.5 | 5.2 | |
| 20201116-3 | 266.7 | 258.1 | 26.2 | |
Table 1 Flight test results m
| 编号 | 初始高度 | 初始误差 | 着陆误差 | |
|---|---|---|---|---|
| 20201114-1 | 90.4 | 100.3 | 22.5 | |
| 20201114-2 | 119.7 | 195.2 | 28.1 | |
| 20201114-3 | 130.4 | 101.3 | 24.5 | |
| 20201115-1 | 80.1 | 133.4 | 27.4 | |
| 20201115-2 | 125.8 | 198.9 | 18.9 | |
| 20201115-3 | 116.3 | 210.6 | 42.5 | |
| 20201115-4 | 102.2 | 187.0 | 11.6 | |
| 20201115-5 | 111.2 | 211.4 | 24.7 | |
| 20201115-6 | 58.8 | 152.5 | 8.5 | |
| 20201115-7 | 84.1 | 229.3 | 19.5 | |
| 20201115-8 | 75.2 | 231.9 | 19.3 | |
| 20201115-9 | 107.2 | 269.8 | 16.6 | |
| 20201116-1 | 286.1 | 239.5 | 33.5 | |
| 20201116-2 | 210.7 | 247.5 | 5.2 | |
| 20201116-3 | 266.7 | 258.1 | 26.2 | |

Fig. 10 Flight test results
| [1] |
|
| [2] |
韩雅慧, 杨春信, 肖华军, 等. 翼伞精确空投系统关键技术和发展趋势[J]. 兵工自动化, 2012, 31(7):1-7.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
doi: 10.1016/j.ast.2020.105778 URL |
| [8] |
doi: 10.1109/ACCESS.2019.2943496 |
| [9] |
doi: 10.1109/Access.6287639 URL |
| [10] |
doi: 10.1177/0954410016688925 URL |
| [11] |
doi: 10.1016/j.ast.2020.106400 URL |
| [12] |
doi: 10.1016/j.cja.2019.04.001 URL |
| [13] |
doi: 10.1016/j.cja.2017.06.003 URL |
| [14] |
doi: 10.1109/TSMC.6221021 URL |
| [15] |
doi: 10.2514/1.12251 URL |
| [16] |
doi: 10.2514/1.59782 URL |
| [17] |
doi: 10.1109/Access.6287639 URL |
| [18] |
高峰, 郭锐, 丰志伟, 等. 翼伞系统5段归航轨迹优化研究[J]. 兵工学报, 2020, 41(5):1025-1033.
doi: 10.3969/j.issn.1000-1093.2020.05.022 |
|
doi: 10.3969/j.issn.1000-1093.2020.05.022 |
|
| [19] |
doi: 10.1016/j.cja.2016.04.003 URL |
| [20] |
doi: 10.1016/j.ast.2018.08.008 URL |
| [21] |
doi: 10.1007/s11071-014-1690-9 URL |
| [22] |
doi: 10.1109/TIE.2008.2011621 URL |
| [23] |
doi: 10.1109/TIE.2021.3050372 URL |
| [24] |
doi: 10.1109/Access.6287639 URL |
| [1] | MA Yuemeng, WANG Linwei, SHAO Chuntao, ZHOU Di, WANG Yonghai. Active-Disturbance-Rejection/Robust Attitude Control System Design of Underactuated Vehicle Based on Flap Control [J]. Acta Armamentarii, 2023, 44(5): 1251-1266. |
| [2] | GAO Yuxuan, HOU Yuanlong, GAO Qiang, HOU Runmin. Compound Control Method of ADRC and FNTSM for Airborne Object Tracking System [J]. Acta Armamentarii, 2023, 44(4): 1071-1085. |
| [3] | LI Dian-qi, DUAN Yong. Implementation of Active Disturbance Rejection Control of Robot by Tracking Differentiator [J]. Acta Armamentarii, 2016, 37(9): 1721-1729. |
| [4] | GAO Qing-yu, TANG Qian-gang, ZHANG Qing-bin, FENG Zhi-wei. Dynamics Analysis of a Two-stage Projection Scheme of Space Nets System [J]. Acta Armamentarii, 2016, 37(4): 719-726. |
| [5] | LI Wei, YANG Gang, CHEN Teng-fei, HAN Chong-wei. Research on Gun Pointing Control of a Full Closed-loop Aiming System [J]. Acta Armamentarii, 2015, 36(9): 1811-1818. |
| [6] | ZHENG Ying, MA Da-wei, YAO Jian-yong, HU Jian. Linear Active Disturbance Rejection Control for Two-axis Coupling Position Servo System of Rocket Launcher [J]. Acta Armamentarii, 2015, 36(6): 987-993. |
| [7] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming, HE Bin. AUV's Depth Control Based on Reconstructive Fault-tolerant Control [J]. Acta Armamentarii, 2015, 36(4): 723-730. |
| [8] | WAN Lei, ZHANG Ying-hao, SUN Yu-shan, LI Yue-ming. AUV’s Bottom Following Control Method Based on ADRC [J]. Acta Armamentarii, 2015, 36(10): 1943-1948. |
| [9] | LI Yan-biao, LI Jing-min, JI Shi-ming, ZHENG Chao, ZHAO Zhang-feng. Dynamic Modeling and Peak Torque Prediction of Servo Motor for a 3-DOF Parallel Humanoid Mechanical Leg [J]. Acta Armamentarii, 2014, 35(11): 1928-1936. |
| [10] | YANG Guan-tong, TANG Sheng-jing, ZHAO Lin-dong, GUO Jie. Dynamic Modeling and Response of a Morphing UAV with Variable Sweep and Variable Span [J]. Acta Armamentarii, 2014, 35(1): 102-107. |
| [11] | QI Xiao-hui, LI Jie, HAN Shuai-tao . Adaptive Active Disturbance Rejection Control and Its Simulation Based on BP Neural Network [J]. Acta Armamentarii, 2013, 34(6): 776-782. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||