
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (2): 380-393.doi: 10.12382/bgxb.2021.0588
Previous Articles Next Articles
SONG Huixin1,2, GU Liang1,*( ), ZHANG Jinqiu3, DONG Mingming1, WANG Liming4
), ZHANG Jinqiu3, DONG Mingming1, WANG Liming4
Received:2021-08-31
Online:2022-06-11
Contact:
GU Liang
CLC Number:
SONG Huixin, GU Liang, ZHANG Jinqiu, DONG Mingming, WANG Liming. Inertia Analysis and Vibration Filtering Buffer Design of Electromechanical Suspension of High Speed Tracked Vehicle[J]. Acta Armamentarii, 2023, 44(2): 380-393.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Energy dissipation or recovery principle of electromechanical suspension
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| 非簧载质量mu/kg | 235 |
| 单元履带质量ml/kg | 170 |
| 扭杆材料剪切弹性模量G/MPa | 78300 |
| 扭杆工作长度l/mm | 1940 |
| 扭杆工作直径dT/mm | 48 |
| 平衡肘初始安装角α0/(°) | -43.56 |
| 负重轮垂向刚度kf/(N·m) | 2160 |
| 履带垂向刚度kl/(N·m) | 40000 |
| 车辆底甲板距地高度h/mm | 406.5 |
| 扭杆中心距车底甲板高度h0/mm | 95 |
| 履带板厚度hb/mm | 80 |
| 平衡肘旋转半径Rd/mm | 360 |
| 负重轮直径Df/mm | 600 |
| 悬架静行程fj/mm | 135 |
| 悬架动行程fd/mm | 293 |
Table 1 Suspension parameters
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| 非簧载质量mu/kg | 235 |
| 单元履带质量ml/kg | 170 |
| 扭杆材料剪切弹性模量G/MPa | 78300 |
| 扭杆工作长度l/mm | 1940 |
| 扭杆工作直径dT/mm | 48 |
| 平衡肘初始安装角α0/(°) | -43.56 |
| 负重轮垂向刚度kf/(N·m) | 2160 |
| 履带垂向刚度kl/(N·m) | 40000 |
| 车辆底甲板距地高度h/mm | 406.5 |
| 扭杆中心距车底甲板高度h0/mm | 95 |
| 履带板厚度hb/mm | 80 |
| 平衡肘旋转半径Rd/mm | 360 |
| 负重轮直径Df/mm | 600 |
| 悬架静行程fj/mm | 135 |
| 悬架动行程fd/mm | 293 |

Fig.2 Single wheel's electromechanical suspension assembly and motion relationship

Fig.3 Relationship between suspension deformation and suspension stiffness/sprung mass natural frequency

Fig.4 Analysis of linkage motion relationship for the electromechanical suspension system
| 参数 | 数值 |
|---|---|
| 平衡肘与摇臂旋转点水平间距AF/mm | 566 |
| 平衡肘与摇臂旋转点垂直间距DF/mm | 70 |
| 摇臂旋转半径CD/mm | 260 |
| 连杆长度CE/mm | 240 |
| 平衡肘旋转点至连杆安装点长度AE/mm | 300 |
| 平衡肘与负重轮旋转点至连杆安装点长度BE/mm | 60 |
Table 2 Suspension linkage parameters
| 参数 | 数值 |
|---|---|
| 平衡肘与摇臂旋转点水平间距AF/mm | 566 |
| 平衡肘与摇臂旋转点垂直间距DF/mm | 70 |
| 摇臂旋转半径CD/mm | 260 |
| 连杆长度CE/mm | 240 |
| 平衡肘旋转点至连杆安装点长度AE/mm | 300 |
| 平衡肘与负重轮旋转点至连杆安装点长度BE/mm | 60 |

Fig.5 Relationship between suspension deformation and rocker arm rotation angle as well as the fitted straight line

Fig.6 Internal structure principle of actuator
| 参数 | 数值 |
|---|---|
| Jr/(kg·m2) | 0.32019 |
| Jx/(kg·m2) | 0.05316 |
| Jd/(kg·m2) | 0.02335 |
| ir | 1 |
| ix | 9.4 |
| id | 5.2 |
| 摇臂的旋转半径Ry/mm | 260 |
Table 3 Parameters of electromechanical actuator
| 参数 | 数值 |
|---|---|
| Jr/(kg·m2) | 0.32019 |
| Jx/(kg·m2) | 0.05316 |
| Jd/(kg·m2) | 0.02335 |
| ir | 1 |
| ix | 9.4 |
| id | 5.2 |
| 摇臂的旋转半径Ry/mm | 260 |

Fig.7 Two-degree-of-freedom (2DOF) electromechanical suspension model
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| ml/kg | 235 |
| mr/kg | 526 |
| ks/(N·mm-1) | 154 |
| cs/(N·s·m-1) | 9612 |
| ku/mm | 1940 |
| cu/(N·s·m-1) | 800 |
| μ | 0.098 |
| β | 2.1 |
| γ | 13.3 |
| ξ | 0.25 |
| ε | 0.083 |
| fs0/Hz | 1.27 |
| fs/Hz | 1.15 |
| fu0/Hz | 15.41 |
| fu/Hz | 8.57 |
Table 4 Parameters of 2DOF electromechanical actuator
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| ml/kg | 235 |
| mr/kg | 526 |
| ks/(N·mm-1) | 154 |
| cs/(N·s·m-1) | 9612 |
| ku/mm | 1940 |
| cu/(N·s·m-1) | 800 |
| μ | 0.098 |
| β | 2.1 |
| γ | 13.3 |
| ξ | 0.25 |
| ε | 0.083 |
| fs0/Hz | 1.27 |
| fs/Hz | 1.15 |
| fu0/Hz | 15.41 |
| fu/Hz | 8.57 |

Fig.8 Variations of inertia force and sprung mass acceleration with vehicle speed
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 惯性质量为0kg | 0 | 2.15 | 0.4212 | 17.47 |
| 惯性质量为526kg | 2216 | 5.17 | 0.5561 | 17.31 |
Table 5 Comparison of suspension characteristics at 40km/h on class F road in the frequency domain
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 惯性质量为0kg | 0 | 2.15 | 0.4212 | 17.47 |
| 惯性质量为526kg | 2216 | 5.17 | 0.5561 | 17.31 |

Fig.9 Power spectral density of sprung mass acceleration with different inertial masses

Fig.10 Inertia force at 40km/h on Class D road

Fig.11 Power spectral density of inertial force under the inertial mass of 526kg

Fig.12 Diagram of the initial frequency of vibration filtering and the vibration filtering region

Fig.13 Variation of the initial frequency of vibration filtering with sprung mass
| 内容 | 路面等级 | |||||
|---|---|---|---|---|---|---|
| A | B | C | D | E | F | |
| 动挠度均方根值/mm | 1.9 | 3.8 | 7.0 | 7.0 | 6.9 | 5.6 |
| 行驶速度不小于/(km·h) | 120 | 120 | 100 | 26 | 7 | 2 |
Table 6 Different speeds on road corresponding to the amplitude value less than 7mm
| 内容 | 路面等级 | |||||
|---|---|---|---|---|---|---|
| A | B | C | D | E | F | |
| 动挠度均方根值/mm | 1.9 | 3.8 | 7.0 | 7.0 | 6.9 | 5.6 |
| 行驶速度不小于/(km·h) | 120 | 120 | 100 | 26 | 7 | 2 |
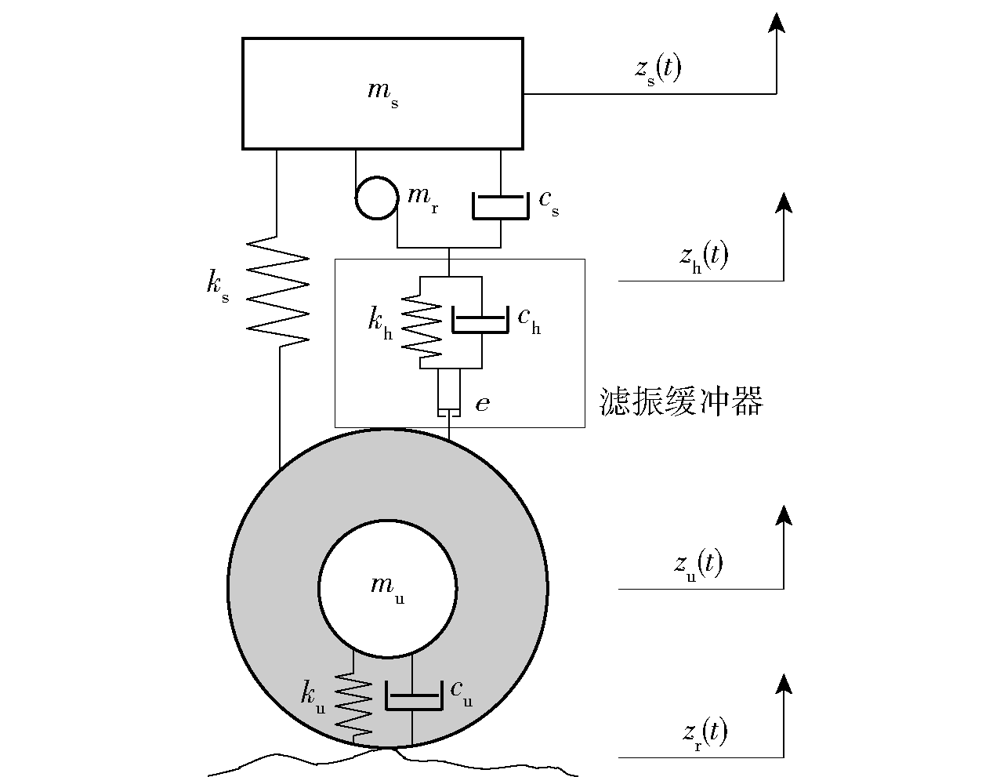
Fig.14 Diagram of 2DOF suspension model with vibration filtering buffer

Fig.15 Vibration filtering buffer structure
| 参数 | 数值 |
|---|---|
| 电机的感应电动势常数ke/(V·s·rad-1) | 0.6 |
| 电机的扭矩常数ki/(N·m·A-1) | 10 |
| 电机负载电阻R/Ω | 100 |
| 电机内阻r/Ω | 1.3 |
| 缓冲器刚度khs/(N·m·rad-1) | 259 |
| 缓冲器阻尼系数chs/(N·m·s·rad-1) | 0.01 |
| 缓冲器转动惯量Jh/(kg·m2) | 0.005 |
Table 7 Motor and buffer parameters
| 参数 | 数值 |
|---|---|
| 电机的感应电动势常数ke/(V·s·rad-1) | 0.6 |
| 电机的扭矩常数ki/(N·m·A-1) | 10 |
| 电机负载电阻R/Ω | 100 |
| 电机内阻r/Ω | 1.3 |
| 缓冲器刚度khs/(N·m·rad-1) | 259 |
| 缓冲器阻尼系数chs/(N·m·s·rad-1) | 0.01 |
| 缓冲器转动惯量Jh/(kg·m2) | 0.005 |
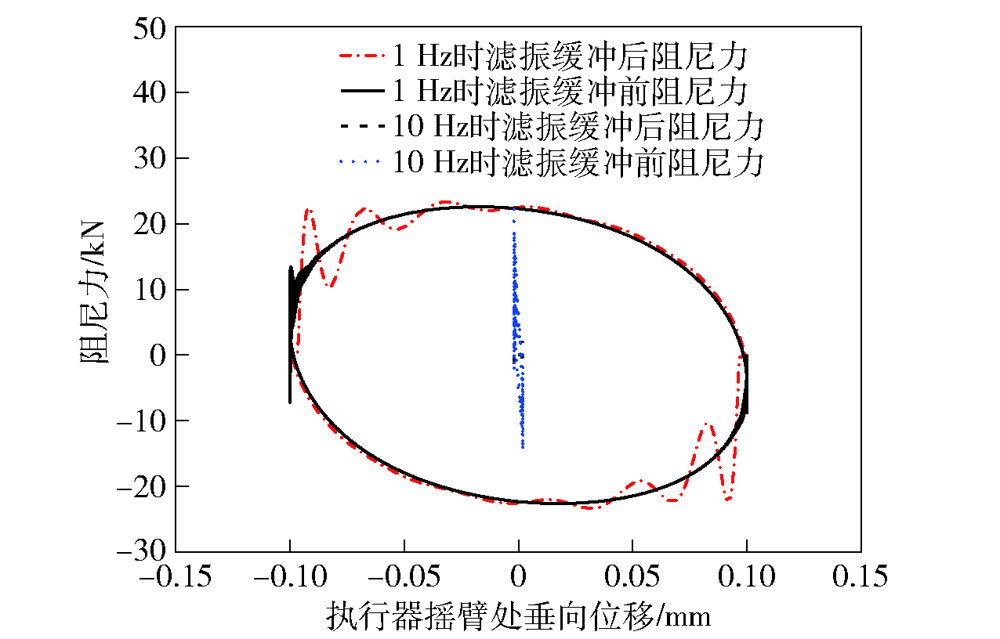
Fig.16 Actuator force-displacement characteristics

Fig.17 Actuator force-speed characteristics

Fig.18 Relationship between mean value of standard deviation of damping force at each frequency and buffer stiffness
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 无惯性质量 | 0 | 0.8609 | 0.3076 | 31.70 |
| 惯性质量为526kg | 2143 | 3.5108 | 0.5568 | 32.20 |
| 惯性质量为526kg (带滤振缓冲器) | 175 | 1.2682 | 0.4104 | 34.03 |
Table 8 Comparison of suspension characteristics for the three states at 40km/h on Class D road
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 无惯性质量 | 0 | 0.8609 | 0.3076 | 31.70 |
| 惯性质量为526kg | 2143 | 3.5108 | 0.5568 | 32.20 |
| 惯性质量为526kg (带滤振缓冲器) | 175 | 1.2682 | 0.4104 | 34.03 |

Fig.19 Comparison of power spectral density of inertial force with or without vibration filtering and buffering measures

Fig.20 Bench test of electromechanical suspension

Fig.21 Measuring point distribution of inner gear ring

Fig.22 Stress comparison of inner gear ring with or without vibration filtering and buffering measures
| 悬架状态 | 簧载质量振动加速度均方根值/(m·s-2) | |||
|---|---|---|---|---|
| 频率3Hz, 振幅30mm | 频率7Hz, 振幅8mm | 频率10Hz, 振幅5mm | 频率15Hz, 振幅3mm | |
| 无滤振缓冲 | 1.8609 | 8.1693 | 12.4382 | 16.3824 |
| 有滤振缓冲 | 0.3881 | 0.6153 | 0.3998 | 1.0373 |
| 降低百分比/% | 79.14 | 92.47 | 96.79 | 93.67 |
Table 9 Comparison of suspension characteristics in multi-frequency bench test
| 悬架状态 | 簧载质量振动加速度均方根值/(m·s-2) | |||
|---|---|---|---|---|
| 频率3Hz, 振幅30mm | 频率7Hz, 振幅8mm | 频率10Hz, 振幅5mm | 频率15Hz, 振幅3mm | |
| 无滤振缓冲 | 1.8609 | 8.1693 | 12.4382 | 16.3824 |
| 有滤振缓冲 | 0.3881 | 0.6153 | 0.3998 | 1.0373 |
| 降低百分比/% | 79.14 | 92.47 | 96.79 | 93.67 |

Fig.23 Comparison of sprung mass acceleration with and without vibration filtering buffer
| 悬架状态 | 均方根值 | ||
|---|---|---|---|
| /(m·s-2) | /mm | ||
| 无滤振缓冲 | 5.8215 | 0.8324 | 35.43 |
| 有滤振缓冲 | 2.5243 | 0.7121 | 38.32 |
Table 10 Comparison of suspension characteristics in bench test of Class D road
| 悬架状态 | 均方根值 | ||
|---|---|---|---|
| /(m·s-2) | /mm | ||
| 无滤振缓冲 | 5.8215 | 0.8324 | 35.43 |
| 有滤振缓冲 | 2.5243 | 0.7121 | 38.32 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
毛明, 张亚峰, 杜甫, 等. 高机动履带车辆行驶系统中的5个科学技术问题[J]. 兵工学报, 2015, 36(8):1546-1555.
doi: 10.3969/j.issn.1000-1093.2015.08.024 |
|
doi: 10.3969/j.issn.1000-1093.2015.08.024 |
|
| [6] |
doi: 10.1016/j.ymssp.2020.106988 URL |
| [7] |
寇发荣, 陈晨, 李阳康, 等. 电磁复合式馈能悬架半主动控制研究[J]. 中国科技论文, 2020, 15(2):167-173.
|
|
|
|
| [8] |
|
| [9] |
喻凡, 张勇超. 馈能型车辆主动悬架技术[J]. 农业机械学报, 2010, 41(1):1-6.
|
|
|
|
| [10] |
黄昆, 喻凡, 张勇超. 基于能量流动分析的电磁式馈能型主动悬架控制[J]. 上海交通大学学报, 2011, 45(7):1068-1073.
|
|
|
|
| [11] |
殷珺, 罗建南, 喻凡. 汽车电磁式主动悬架技术综述[J]. 机械设计与研究, 2020, 36(1):161-168.
|
|
|
|
| [12] |
曹民, 刘为, 喻凡. 车辆主动悬架用电机作动器的研制[J]. 机械工程学报, 2008, 44(11):224-228.
|
|
|
|
| [13] |
张进秋, 彭志召, 岳杰, 等. 车辆馈能悬挂技术综述[J]. 装甲兵工程学院学报, 2012, 26(5):1-7.
|
|
|
|
| [14] |
张进秋, 王兴野, 贾进峰, 等. 主动悬架有限频域H∞时滞控制参数影响分析及优化[J]. 兵工学报, 2018, 39(9):1850-1857.
doi: 10.3969/j.issn.1000-1093.2018.09.023 |
|
|
|
| [15] |
王兴野, 张进秋, 刘义乐, 等. 作动器惯性质量对主动悬架幅频特性的影响[J]. 汽车工程, 2018, 40(9):1083-1088.
|
|
|
|
| [16] |
彭虎, 张进秋, 张建, 等. 并联复合式电磁悬挂模型参考多模式切换控制研究[J]. 兵工学报, 2019, 40(1):19-28.
doi: 10.3969/j.issn.1000-1093.2019.01.003 |
|
doi: 10.3969/j.issn.1000-1093.2019.01.003 |
|
| [17] |
汪若尘, 谢健, 叶青, 等. 直线电机式主动悬架建模与试验研究[J]. 汽车工程, 2016, 38(4):495-499.
|
|
|
|
| [18] |
汪若尘, 钱禹辰, 丁仁凯, 等. 基于LQG的混合电磁悬架阻尼-刚度设计及试验研究[J]. 振动与冲击, 2018, 37(3):61-65.
|
|
|
|
| [19] |
王庆年, 刘松山, 王伟华, 等. 滚珠丝杠式馈能型减振器的结构设计及参数匹配[J]. 吉林大学学报(工学版), 2012, 42(5):1100-1106.
|
|
|
|
| [20] |
段国柱, 宋慧新, 陈宇, 等. 基于MATLAB 软件的机电悬挂连杆机构的运动学分析[J]. 机械工程师, 2020(2):103-104,109.
|
|
|
|
| [21] |
余志生, 夏群生. 汽车理论[M]. 北京: 机械工业出版社, 2019.
|
|
|
|
| [22] |
宋慧新, 李翠芬. 基于频率分析的半主动悬架模糊控制方法研究[J]. 汽车工程, 2008, 30(6):518-522.
|
|
|
|
| [23] |
doi: 10.1109/TVT.2012.2229308 URL |
| [1] | YANG Zhanhua, LIU Chunsheng, LI Jun, GUO Shaopeng, LI Jianyang. Dynamic Modeling and Simulation of Airborne Vehicle's Landing Buffer Process [J]. Acta Armamentarii, 2022, 43(S1): 26-34. |
| [2] | LI Zixuan, YANG Guolai, LIU Ning. Finite Element Simulation Model for Electromagnetic Buffer under Intensive Impact Load [J]. Acta Armamentarii, 2021, 42(5): 913-923. |
| [3] | ZHANG Cheng, LIU Zhaoyang, GU Keqiu. Buffering Mechanism and Characteristic Optimization of Ultra-light Artillery Backtrail [J]. Acta Armamentarii, 2020, 41(9): 1752-1761. |
| [4] | WEI Wei, PENG Hui, LIU Xu, JIAN Hongchao, XIE Wenhao, YAN Qingdong, ZHU Haoyue. Research on Dynamic Oil-filling Cushioning Properties of Locking Clutch in a Hydrodynamic Transmission Vehicle [J]. Acta Armamentarii, 2019, 40(7): 1358-1364. |
| [5] | FENG Jiang-tao, GAO Qin-he, GUAN Wen-liang, LI Liang. Modeling of Telescopic Hydraulic Cylinder and Research on Inter-stage Buffer [J]. Acta Armamentarii, 2016, 37(12): 2268-2276. |
| [6] | LIU Xin-xin1,2, CHU Fu-lei1, XYU Hong-bin2. Influence of Buffer Device on Initial Disturbance of Missile System [J]. Acta Armamentarii, 2013, 34(2): 154-161. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||