
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (S2): 61-70.doi: 10.12382/bgxb.2023.0898
所属专题: 群体协同与自主技术
慕林栋1,2, 赵鑫磊1,2, 许鹏1,2, 邱天奇1,2, 江磊1,2,*( )
)
收稿日期:2023-09-11
上线日期:2024-01-10
通讯作者:
基金资助:
MU Lindong1,2, ZHAO Xinlei1,2, XU Peng1,2, QIU Tianqi1,2, JIANG Lei1,2,*()
Received:2023-09-11
Online:2024-01-10
摘要:
为拓展四足仿生机器人的运输能力,提出一种助力双轮拖车载荷构型,自带动力并由四足仿生机器人牵引,从而获得更大的运输能力,同时兼顾整体的灵活机动能力,具备一定的越野能力。通过分析其运动学和动力学特点,建立双轮拖车载荷的动力学仿真模型,提出基于力控的助力控制算法,并以此为依据设计双轮拖车载荷实物样机,在该样机上对算法进行验证。实验结果表明,助力双轮拖车载荷可以在满载的情况下较好地响应四足仿生机器人的运动状态,并具有一定的越野能力,极大地拓展了四足仿生机器人的运输能力。
中图分类号:
慕林栋, 赵鑫磊, 许鹏, 邱天奇, 江磊. 基于力控的助力双轮拖车载荷[J]. 兵工学报, 2023, 44(S2): 61-70.
MU Lindong, ZHAO Xinlei, XU Peng, QIU Tianqi, JIANG Lei. Two-wheeled Power-assist Trailer Payload Based on Force Control[J]. Acta Armamentarii, 2023, 44(S2): 61-70.

图1 典型的轮腿机器人
Fig.1 Typical wheel-legged robot

图2 国内外小型电动运输车
Fig.2 Small electric transport vehicles at home and abroad
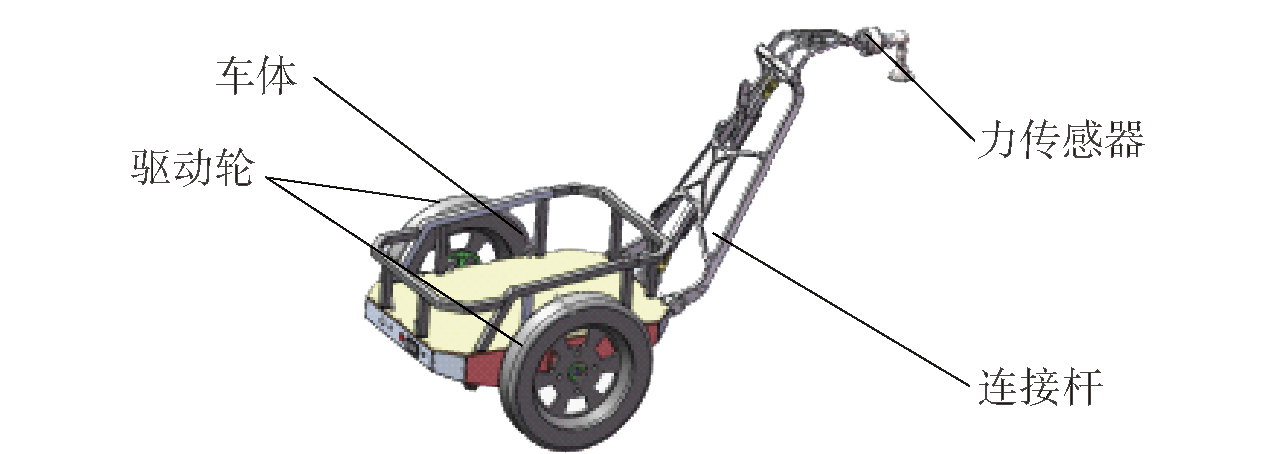
图3 拖车载荷总体结构示意图
Fig.3 Overall structure diagram of trailer robot
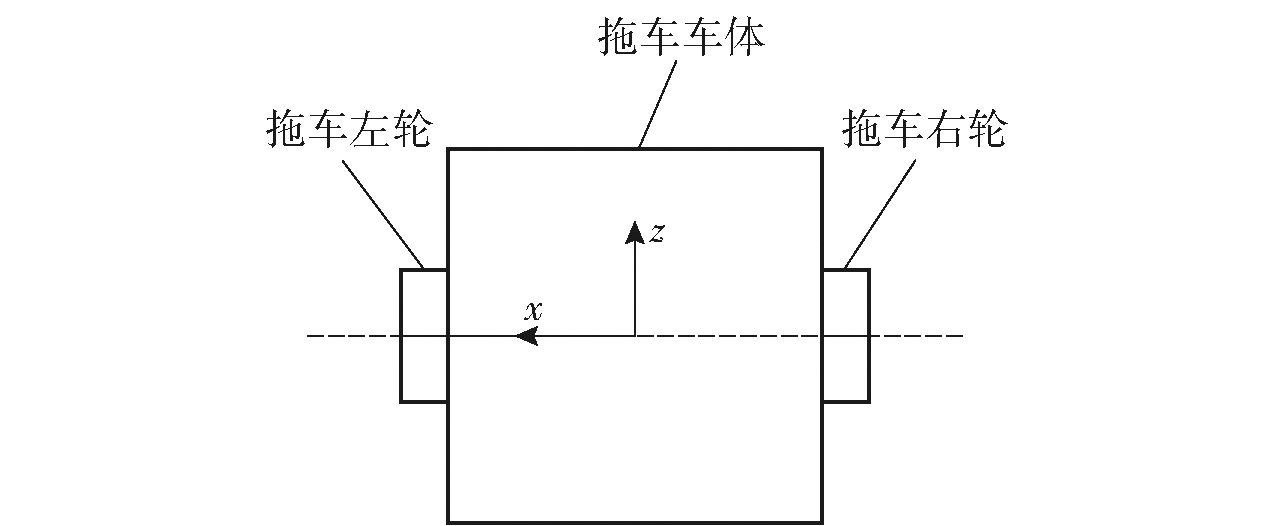
图4 拖车简化机构模型
Fig.4 Simplified mechanism model of trailer
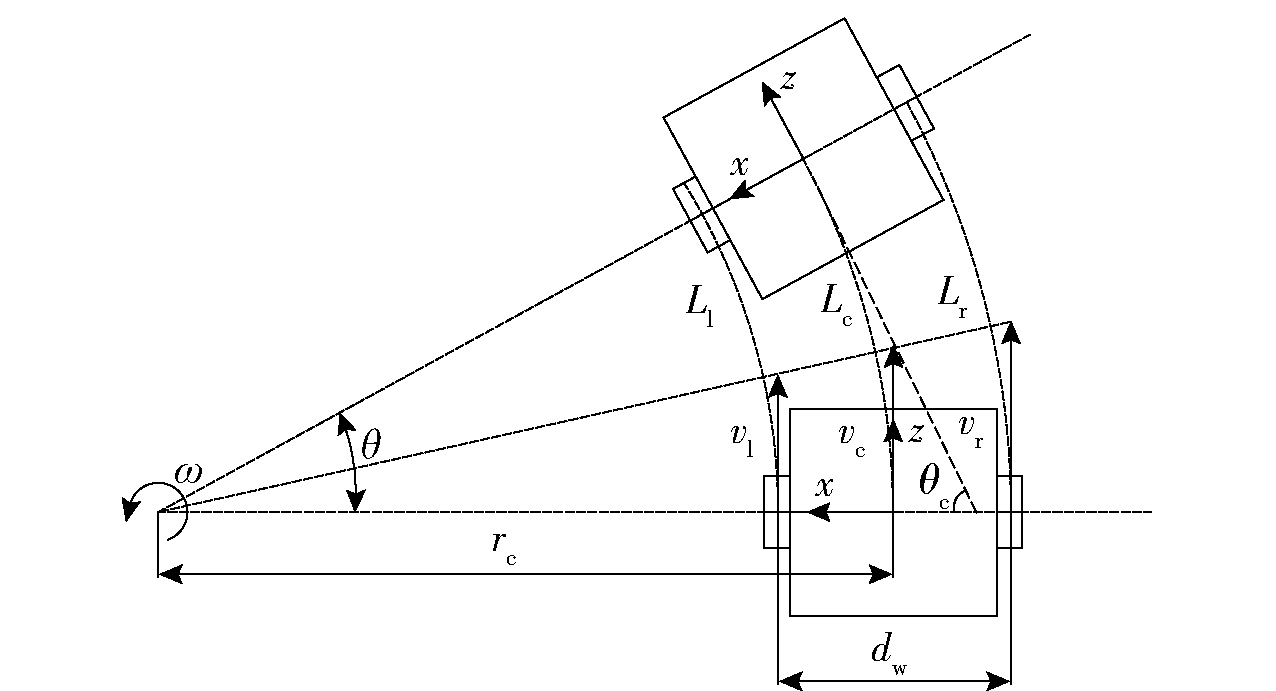
图5 两轮拖车差速运动模型
Fig.5 Differential motion model of two-wheel trailer
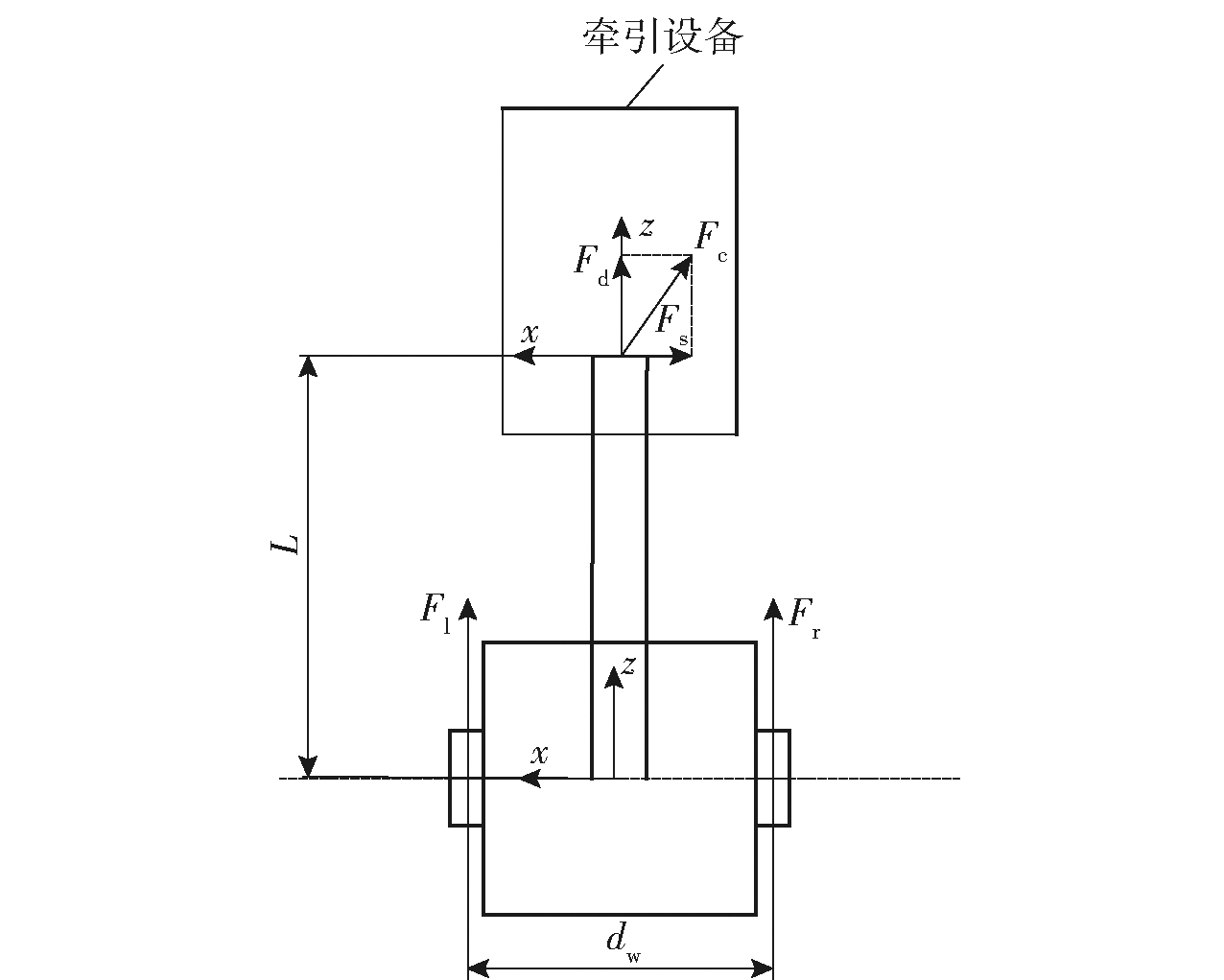
图6 两轮拖车系统简易机构模型
Fig.6 Simple mechanism model of two-wheel trailer system
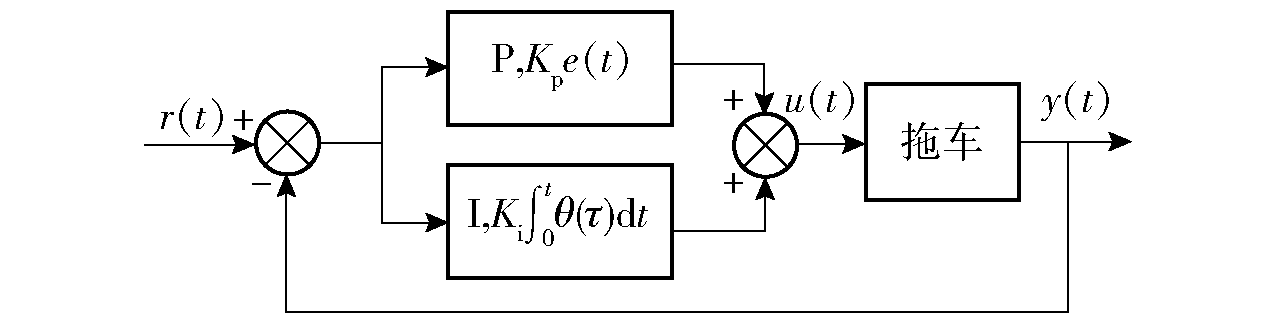
图7 拖车载荷控制系统原理框图
Fig.7 Block diagramof control system of trailer robot
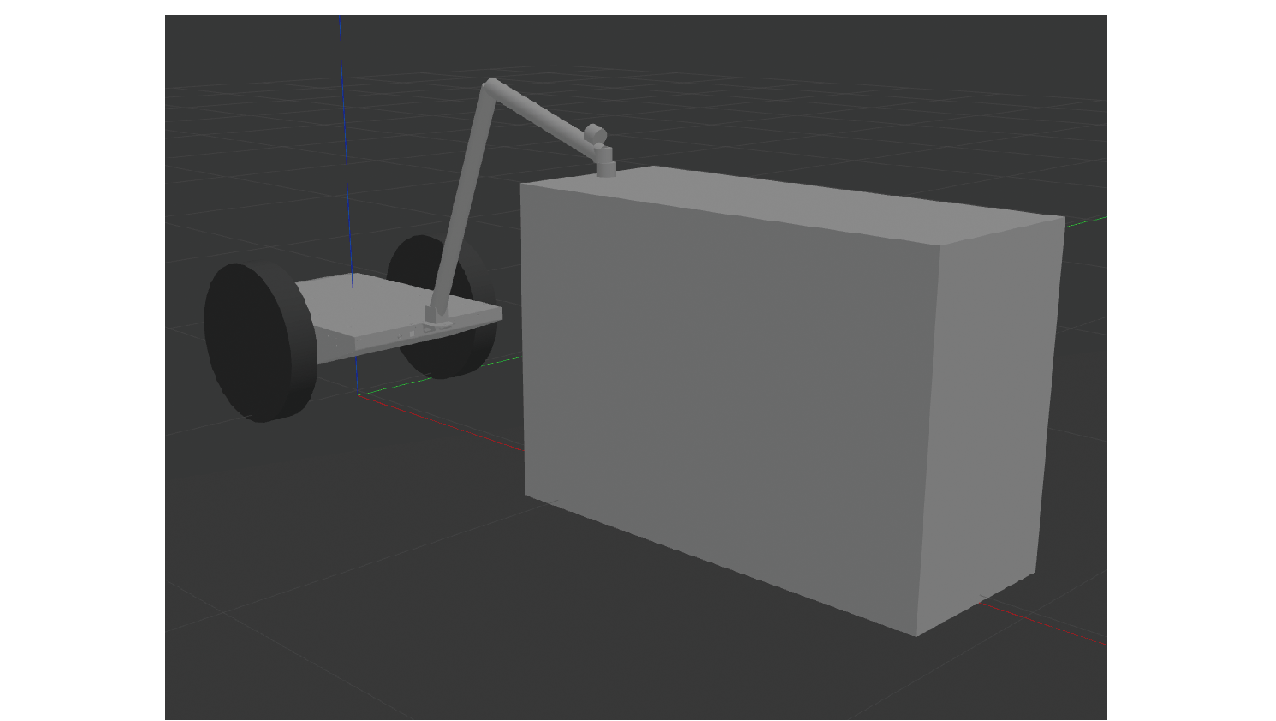
图8 拖车载荷仿真模型(含牵引滑块)
Fig.8 Simulation model of trailer robot (including traction slider)
| 参数 | 数值 |
|---|---|
| 弹性系数 | 200000.0 |
| 阻尼系数 | 150.0 |
| 滑动摩擦因数 | 1.0 |
表1 轮胎接触参数
Table 1 Contact parameters of tire
| 参数 | 数值 |
|---|---|
| 弹性系数 | 200000.0 |
| 阻尼系数 | 150.0 |
| 滑动摩擦因数 | 1.0 |
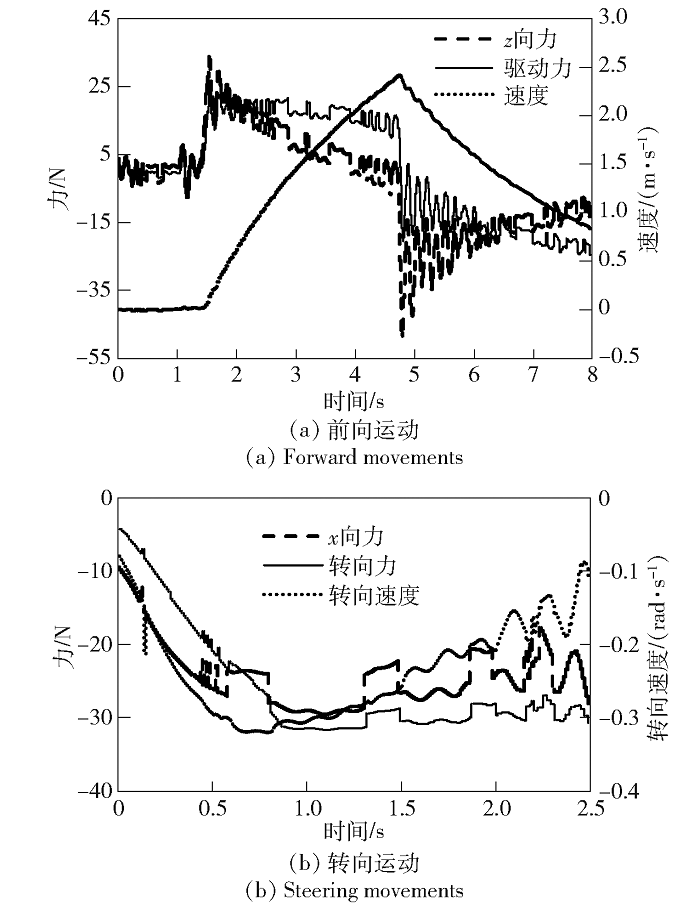
图9 拖车载荷仿真运动数据
Fig.9 Motion simulation data of trailer robots

图10 拖车载荷总体结构(含示意负载)
Fig.10 Overall structure of trailer robot (including schematic load)
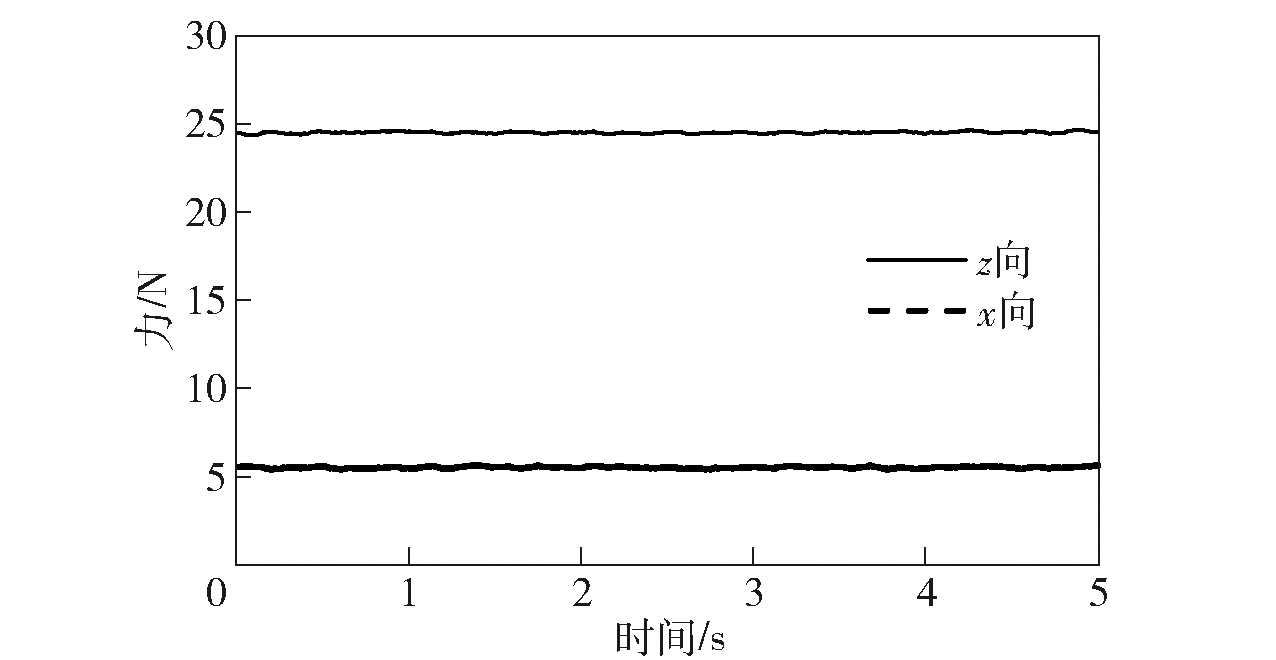
图11 静止状态下力传感器数据
Fig.11 Force sensor data in the static state
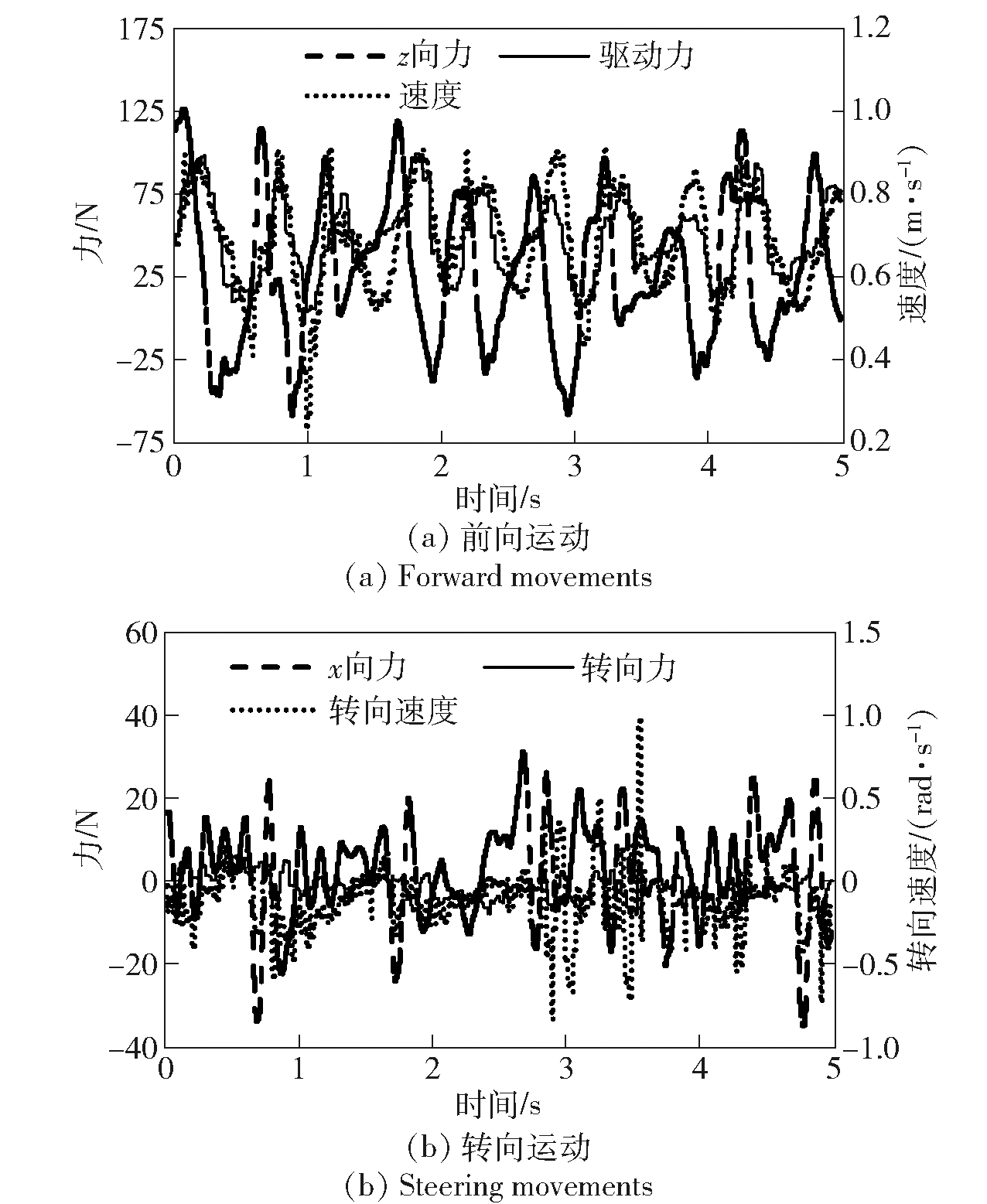
图12 拖车载荷水平地面牵引试验数据
Fig.12 Test data of trailer robot traction on horizontal ground
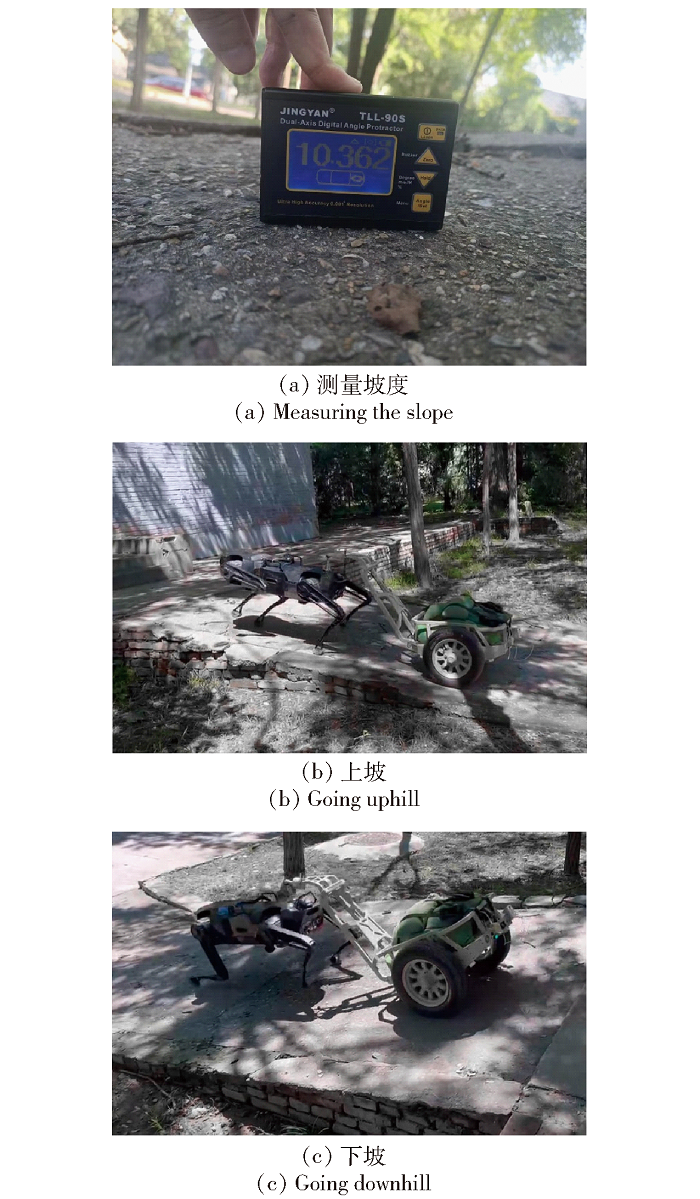
图13 拖车载荷上下坡牵引试验
Fig.13 Uphill and downhill traction test of trailer robots
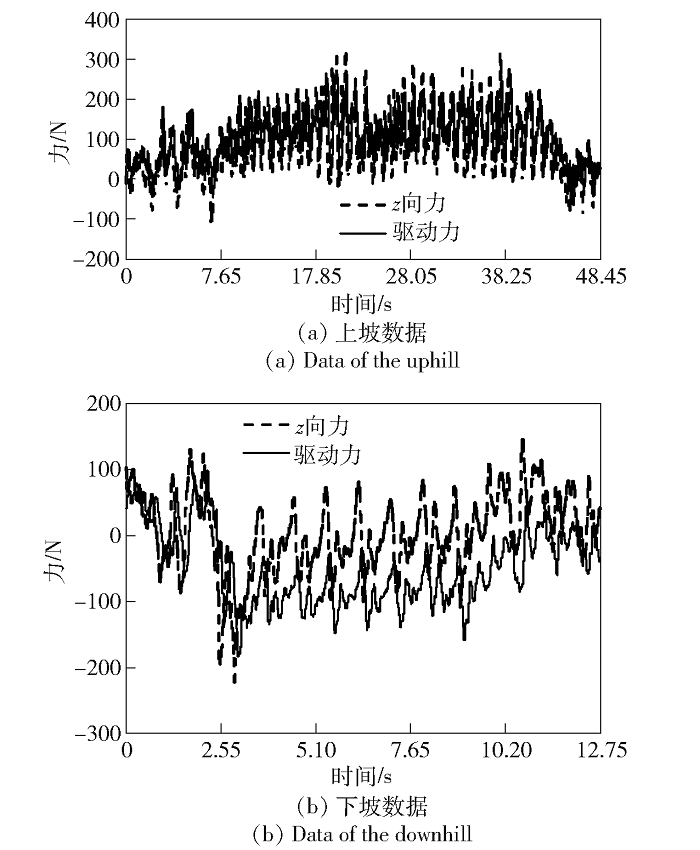
图14 拖车载荷上下坡牵引试验数据
Fig.14 Uphill and downhill traction test data of trailer robots

图15 拖车载荷越野牵引试验
Fig.15 Off-road traction test of trailer robots
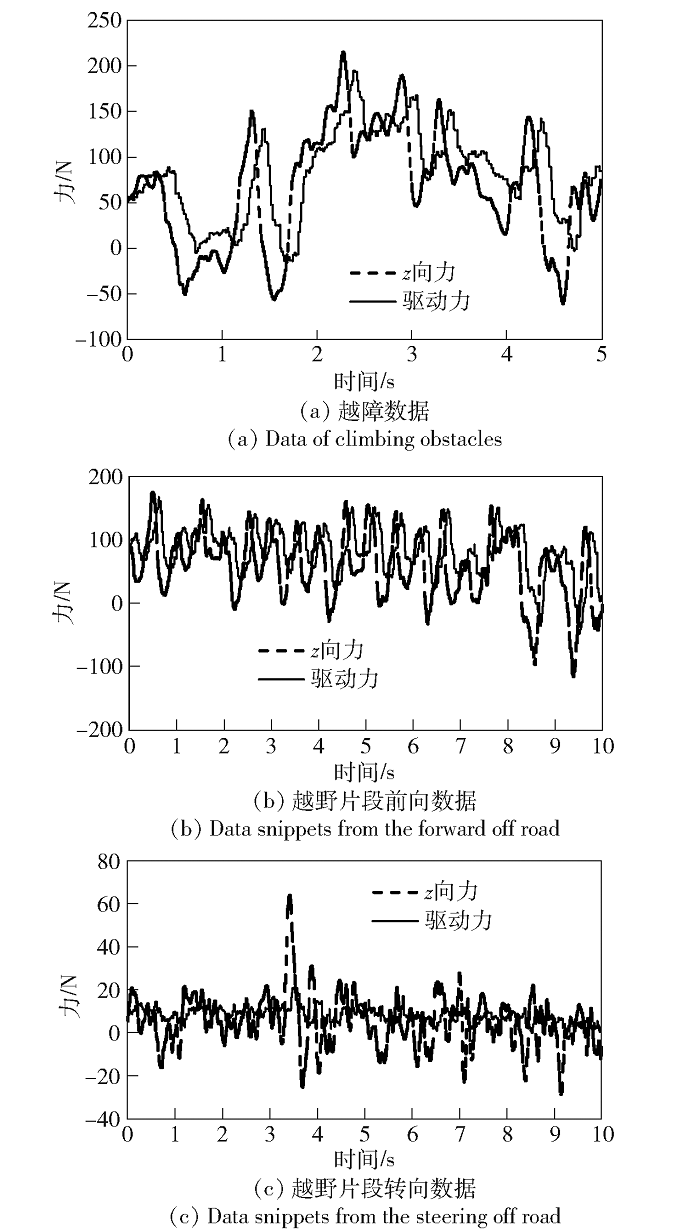
图16 拖车载荷越野牵引试验数据
Fig.16 Off-road traction test data of trailer robots
| [1] |
魏庆生. 四足机器人设计与运动控制仿真研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
|
|
|
|
| [2] |
闫曈, 许威, 苏波. 基于ZMP的四足仿生机器人反应式行为控制策略研究[J]. 车辆与动力技术, 2021(1): 1-7.
|
|
|
|
| [3] |
许威, 苏波, 江磊, 等. 足式越野机器人集群系统关键技术与应用展望[J]. 兵工学报, 2023, 44(9): 2568-2579.
doi: 10.12382/bgxb.2023.0445 |
|
|
|
| [4] |
苏波, 闫曈, 许威, 等. 四足机器人高机动越野技术研究[J]. 中国科学: 技术科学, 2023, 53(9):1574-1588.
|
|
|
|
| [5] |
安国鹏. 基于五杆机构四足机器人结构设计与步态实验研究[D]. 重庆: 重庆大学, 2020.
|
|
|
|
| [6] |
廖绍辉. 基于零力矩点的四足轮腿机器人运动轨迹规划研究[D]. 成都: 电子科技大学, 2022.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
doi: 10.2478/amtm-2019-0004 URL |
| [10] |
doi: 10.2507/IJSIMM URL |
| [11] |
doi: 10.1109/ACCESS.2021.3062392 URL |
| [12] |
马勤勇. 两轮差速驱动移动机器人运动模型研究[D]. 重庆: 重庆大学, 2013.
|
|
|
|
| [13] |
doi: 10.1016/j.actaastro.2022.01.025 URL |
| [14] |
|
| [15] |
SteedTM silent tactical energy enhanced dismountEB/OL 2023-08-15. https://static1.squarespace.com/static/5e16132403e4cf0c9c5bf77e/t/60bf691bded9074b99a252af/1623157021541/200904+STEED+Handout+Web.pdf
|
| [16] |
李国. 一种应急抢险携行车: 中国, 202111210060.2[P]. 2023-09-01.
|
|
|
|
| [17] |
张雷雨, 张新尚, 孙旭, 等. 一种军用多功能助力拖车:中国, 202310452712[P]. 2023-09-01.
|
|
|
|
| [18] |
李艺青, 王建军, 郁万涛. 两轮差速移动机器人构型与运动学研究[J]. 成都航空职业技术学院学报, 2022(4):59-62.
|
|
|
|
| [19] |
冉松. 两轮差速移动机器人仿人智能自适应 Backstepping 点镇定控制[D]. 重庆: 重庆大学, 2018.
|
|
|
|
| [20] |
马艳菊. 电动助力车控制技术研究[D]. 杭州: 杭州电子科技大学, 2018.
|
|
|
|
| [21] |
刘金琨. 先进 PID 控制 MATLAB 仿真[M]. 北京: 电子工业出版社, 2004.
|
|
|
|
| [22] |
黄卫华. 模糊控制系统及应用[M]. 北京: 电子工业出版社, 2012.
|
|
|
|
| [23] |
Gazebo: tutorial: physics parametersthe gazebo robot simulation[EB/OL].(2020-04-24)[2023-08-18]. http://gazebosim.org/tutorials?tut=physics_params&cat=physics.
|
| [24] |
朱成伟. 汽车轮胎稳态滚动阻力建模及实验分析[D]. 长春: 吉林大学, 2021.
|
|
|
|
| [25] |
哈斯巴根. 子午线轮胎静动态特征仿真分析及优化设计[D]. 合肥: 合肥工业大学, 2016.
|
|
|
|
| [26] |
任洁雨. 子午线轮胎结构设计及其对力学特性影响研究[D]. 镇江: 江苏大学, 2015.
|
|
|
|
| [27] |
李韶华, 周军魏, 张志达. 轮胎三向动态特性试验及非线性建模[J]. 机械工程学报, 2018, 54(18): 85-96.
doi: 10.3901/JME.2018.18.085 |
|
doi: 10.3901/JME.2018.18.085 |
|
| [28] |
|
| [1] | 梁福文,苗龙,田丰,宋家辉,白松,何梓豪,王宁飞. 摩擦力对空间非导电绳系释放动力学的影响[J]. 兵工学报, 2024, 45(4): 1158-1167. |
| [2] | 高普, 李宏才, 刘辉, 孟杰克. 装甲车辆综合传动装置外接油管系统动态特性分析[J]. 兵工学报, 2023, 44(11): 3447-3454. |
| [3] | 宋纪元, 朱爱斌, 屠尧, 张甲林, 张育林. 单兵救援助力外骨骼机器人的设计与特性分析[J]. 兵工学报, 2022, 43(9): 2037-2047. |
| [4] | 李军宁, 王倩, 韩卡, 陈武阁. 坦克炮发射角对炮塔座圈动力学行为及其润滑性能的影响[J]. 兵工学报, 2021, 42(9): 1819-1828. |
| [5] | 刘亚丽, 宋遒志, 赵明升, 周能兵, 刘悦. 基于力位混合控制的踝关节外骨骼机器人四段式助力技术[J]. 兵工学报, 2021, 42(12): 2722-2730. |
| [6] | 刘真畅, 唐胜景, 李梦婷, 王肖, 郭杰. 固定翼垂直起降无人机过渡机动优化控制分配研究[J]. 兵工学报, 2019, 40(2): 314-325. |
| [7] | 甄文强, 杨奇, 姬永强, 石运国. 发射环境下导弹折叠翼的展开试验及仿真分析[J]. 兵工学报, 2018, 39(9): 1756-1761. |
| [8] | 肖俊波, 杨国来, 李洪强, 邱明, 廖振强. 身管武器时延式喷管减后坐动力学建模仿真[J]. 兵工学报, 2017, 38(10): 1909-1917. |
| [9] | 甄文强,姬永强,石运国. 导弹折叠翼展开过程的动力学仿真及试验研究[J]. 兵工学报, 2016, 37(8): 1409-1414. |
| [10] | 宋遒志, 王晓光, 王鑫, 汪阳. 多关节外骨骼助力机器人发展现状及关键技术分析[J]. 兵工学报, 2016, 37(1): 172-185. |
| [11] | 邹衍, 徐诚, 张克. 5.8mm/7.62mm模块化步枪运动特性匹配分析[J]. 兵工学报, 2015, 36(7): 1356-1362. |
| [12] | 李佳圣, 邱明, 廖振强, 咸东鹏, 宋杰. 带膛口助旋制退器的转管机枪动力学建模与仿真[J]. 兵工学报, 2014, 35(9): 1344-1349. |
| [13] | 黄雪涛, 顾亮, 吕唯唯, 杨聪彬, 高晓东, 朱兴高. 履带张紧力及其影响因素分析[J]. 兵工学报, 2014, 35(7): 1110-1118. |
| [14] | 李军, 苑士华, 剧冬梅, 李瑞英. 基于动力学仿真的特种车辆操纵稳定性试验方法研究[J]. 兵工学报, 2014, 35(2): 262-267. |
| [15] | 任凯, 杨立, 浦金云, 苏学荣. 基于系统动力学特性的虚拟舱室灭火交互模型[J]. 兵工学报, 2013, 34(9): 1137-1143. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4