
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (S2): 71-83.doi: 10.12382/bgxb.2023.0897
所属专题: 群体协同与自主技术
刘思宇1, 廖峻北1, 雷飞1, 王志瑞2,3, 闫曈2,3, 党睿娜2,3, 郭朝1,*( )
)
收稿日期:2023-09-08
上线日期:2024-01-10
通讯作者:
基金资助:
LIU Siyu1, LIAO Junbei1, LEI Fei1, WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3, GUO Zhao1,*()
Received:2023-09-08
Online:2024-01-10
摘要:
为了提升四足机器人腿足的运动性能,设计一种具有并联弹性驱动器(Parallel Elastic Actuator,PEA)的腿足关节,通过模仿四足动物的肌腱作用原理,将拉簧并联在小腿连杆和大腿连杆之间,在膝关节处实现了并联弹性驱动,具有尺寸小、质量和惯量低的特点。建立了PEA膝关节的动力学模型,并借助该模型,在预设跟踪任务轨迹下,综合考虑峰值力矩、峰值功率和能量利用率,对拉簧的刚度系数进行多目标优化,得到全局最优的拉簧刚度为5510N/m。为了对比本PEA关节与电机直驱关节的性能,从仿真和实验两个方面进行验证。利用Gazebo机器人仿真环境,使用带有刚度的滑动副来实现PEA拉簧的效果,通过物理引擎模拟获取关节电机的输出力矩、输出功率、机械能耗;搭建PEA膝关节实验平台开展样机实验,获取膝关节电机的电源输入参数,如输入电流、输入功率、电源能耗。实验结果表明:PEA对比电机直驱关节,在0.5~2.0s的轨迹周期下,电机输出方面可以减少峰值力矩40%~79%、峰值功率52%~89%和机械能损耗40%~89%,电机输入方面可以减少峰值电流46%~77%、峰值电功率43%~76%和电能损耗62%~73%。
中图分类号:
刘思宇, 廖峻北, 雷飞, 王志瑞, 闫曈, 党睿娜, 郭朝. 用于四足机器人的并联弹性腿足关节设计与优化[J]. 兵工学报, 2023, 44(S2): 71-83.
LIU Siyu, LIAO Junbei, LEI Fei, WANG Zhirui, YAN Tong, DANG Ruina, GUO Zhao. Design and Optimization of a Parallel Elastic Actuator Leg for Quadruped Robots[J]. Acta Armamentarii, 2023, 44(S2): 71-83.

图1 四足机器人用并联弹性腿
Fig.1 Quadruped robot with PEA leg

图2 并联弹性腿爆炸图
Fig.2 Exploded view of PEA leg
| 名称 | 限位/(°) | 长度/m | 质量/kg |
|---|---|---|---|
| HAA | [-30, 30] | ||
| HFE | [-200, 40] | ||
| KFE | [25, 130] | ||
| 髋 | 0.58 | ||
| 大腿 | 0.220 | 1.48 | |
| 小腿 | 0.201 | 0.15 | |
| 足底 | 0.025 | 0.03 |
表1 并联弹性腿机械参数
Table 1 Mechanical parameters of PEA leg
| 名称 | 限位/(°) | 长度/m | 质量/kg |
|---|---|---|---|
| HAA | [-30, 30] | ||
| HFE | [-200, 40] | ||
| KFE | [25, 130] | ||
| 髋 | 0.58 | ||
| 大腿 | 0.220 | 1.48 | |
| 小腿 | 0.201 | 0.15 | |
| 足底 | 0.025 | 0.03 |
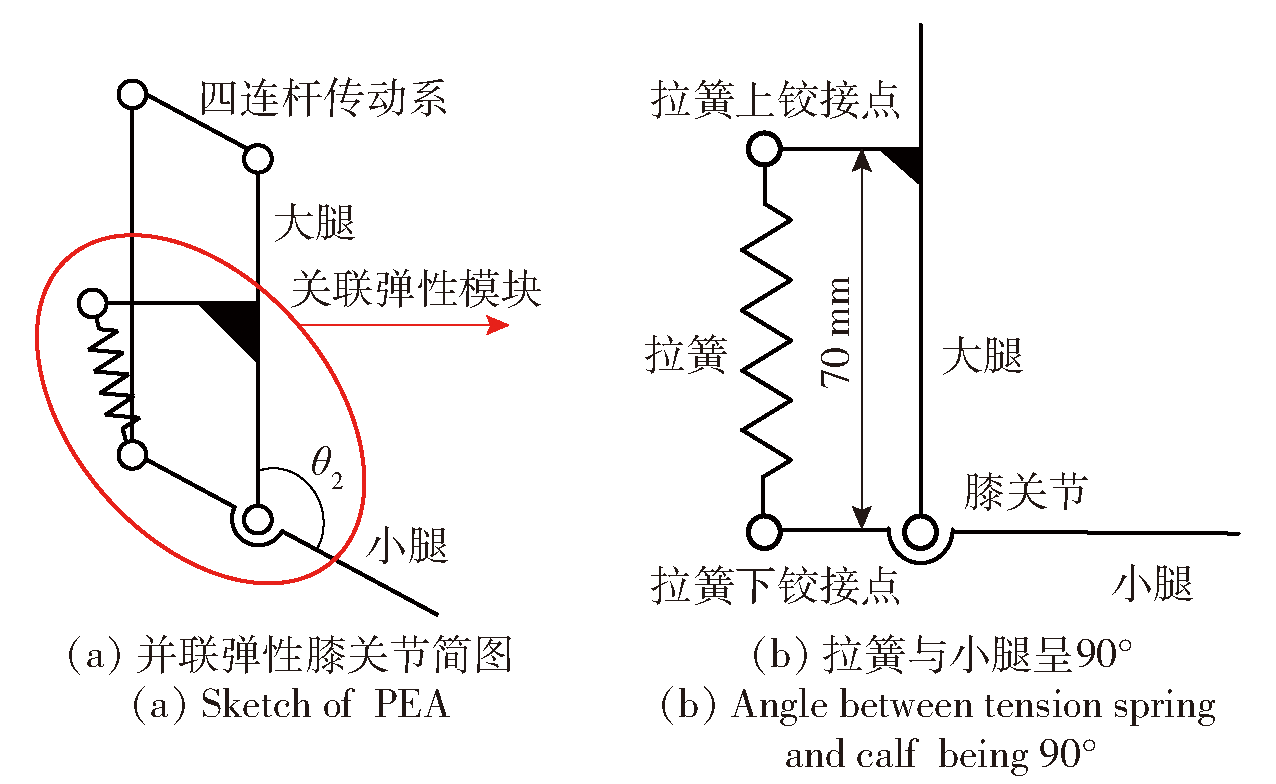
图3 拉簧布置
Fig.3 Layout of tension spring
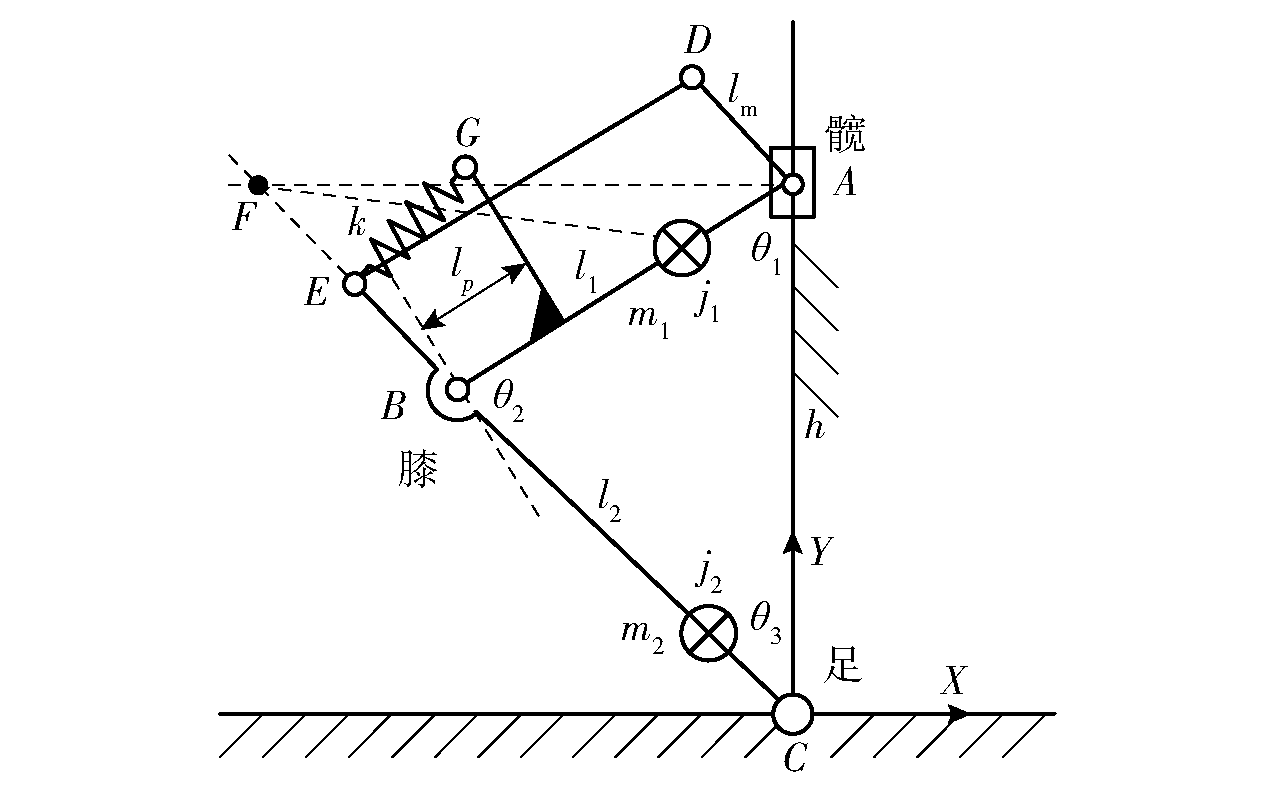
图4 PEA膝关节的动力学模型
Fig.4 Dynamics model of knee joint driven by PEA
| 参数 | 数值 |
|---|---|
| 输入输出连杆长度lm/m | 0.025 |
| 大腿长度l1/m | 0.220 |
| 小腿长度l2/m | 0.201 |
| 大腿质量m1/kg | 2.064 |
| 小腿质量m2/kg | 0.148 |
| 大腿转动惯量j1/(kg·m2) | 0.004 |
| 小腿转动惯量j2/(kg·m2) | 0.0003 |
| 大腿质心相对于大腿连杆长度的比例r1 | 0.9 |
| 小腿质心相对于小腿连杆长度的比例r2 | 0.2 |
表2 并联弹性腿动力学参数
Table 2 Dynamics parameters of PEA leg
| 参数 | 数值 |
|---|---|
| 输入输出连杆长度lm/m | 0.025 |
| 大腿长度l1/m | 0.220 |
| 小腿长度l2/m | 0.201 |
| 大腿质量m1/kg | 2.064 |
| 小腿质量m2/kg | 0.148 |
| 大腿转动惯量j1/(kg·m2) | 0.004 |
| 小腿转动惯量j2/(kg·m2) | 0.0003 |
| 大腿质心相对于大腿连杆长度的比例r1 | 0.9 |
| 小腿质心相对于小腿连杆长度的比例r2 | 0.2 |
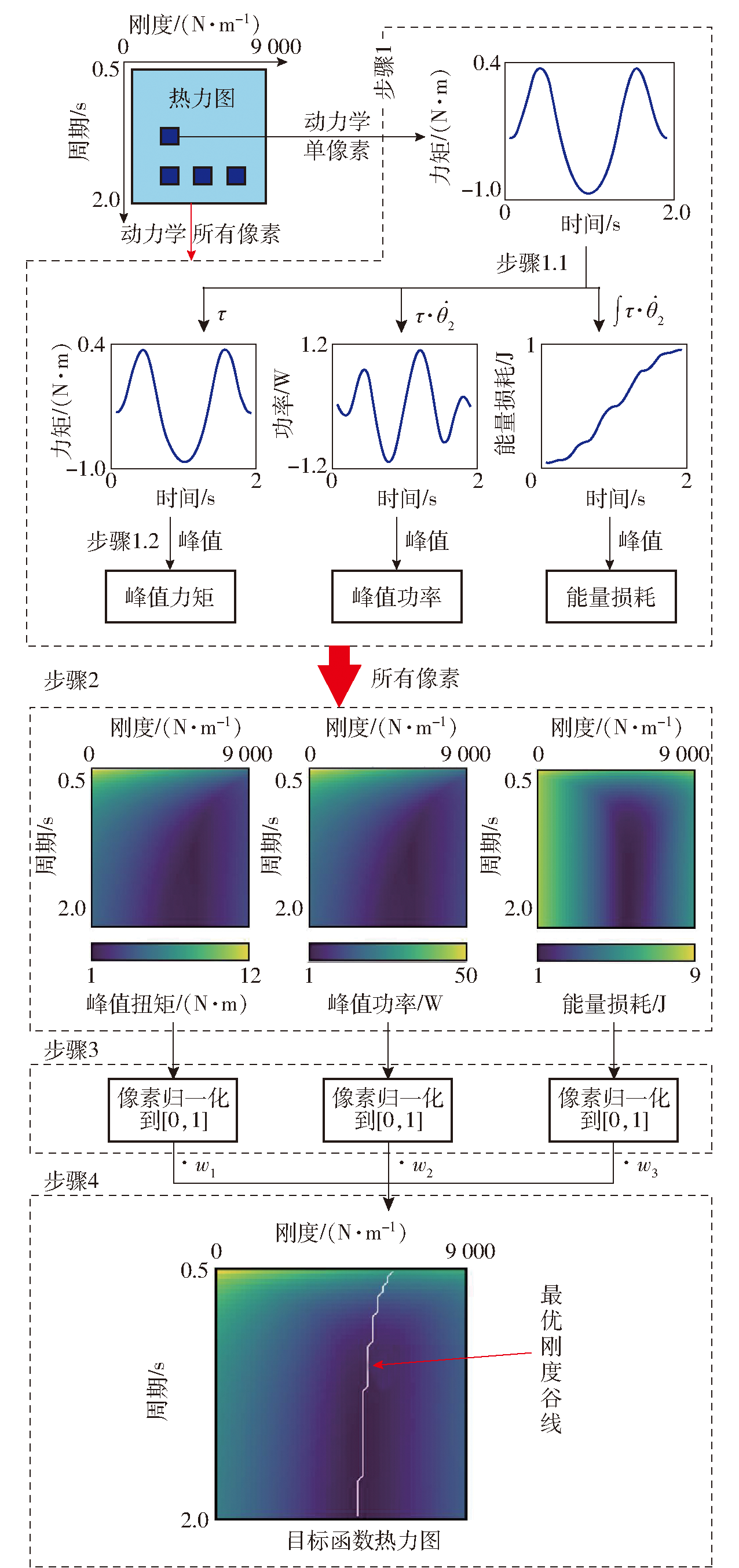
图5 PEA拉簧刚度优化过程
Fig.5 Optimization process of PEA’s tension spring stiffness

图6 峰值力矩、峰值功率、能量损耗和优化目标函数的热力图
Fig.6 Heatmaps of peak torque, peak power, energy consumption and target optimization function
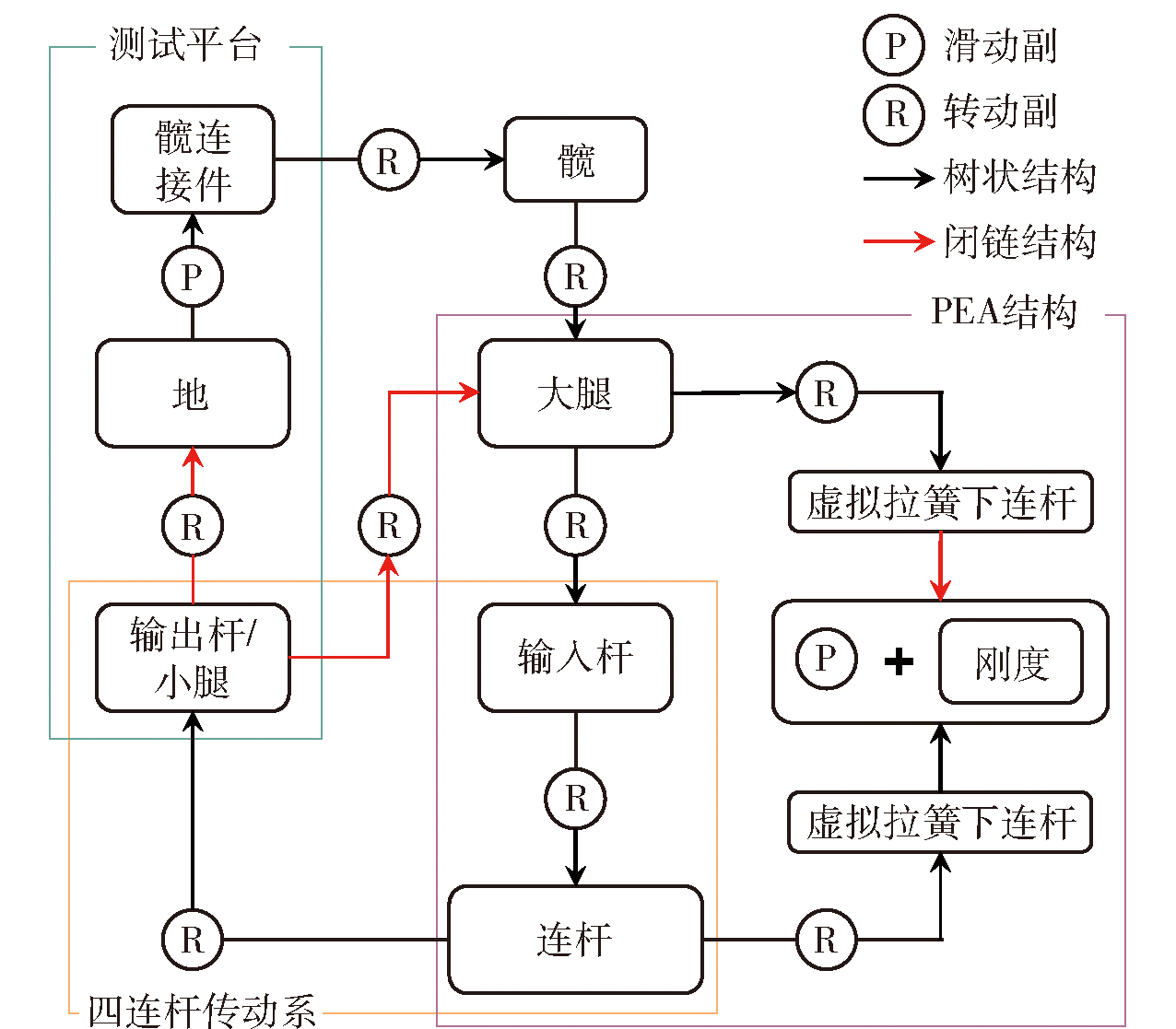
图7 Gazebo环境下机器人描述
Fig.7 Robot description in Gazebo environment

图8 虚拟拉簧与虚拟拉簧工作原理
Fig.8 Virtual tension spring and its working principle

图9 从电机输出特性层面验证理论和仿真下并联弹性腿的有效性
Fig.9 Effectiveness of PEA leg validated from the perspective of motor output characteristics in theory and simulation
| T/s | 理论模型 | 仿真结果 | ||||
|---|---|---|---|---|---|---|
| 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | |
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) | 4.02 (39.88%) | 19.53 (51.59%) | 2.74 (40.10%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) | 4.13 (79.42%) | 10.90 (89.13%) | 6.10 (89.24%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) | 3.36 (77.73%) | 6.50 (84.54%) | 6.11 (89.34%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) | 2.97 (73.98%) | 4.68 (82.01%) | 5.93 (86.72%) |
表3 理论模型与仿真实验,验证峰值力矩、峰值功率和能量损耗减少量与减少百分比
Table 3 Reduction in quantity and percentage of peak torque, peak power and energy consumption validated by dynamics model and simulation
| T/s | 理论模型 | 仿真结果 | ||||
|---|---|---|---|---|---|---|
| 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J | |
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) | 4.02 (39.88%) | 19.53 (51.59%) | 2.74 (40.10%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) | 4.13 (79.42%) | 10.90 (89.13%) | 6.10 (89.24%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) | 3.36 (77.73%) | 6.50 (84.54%) | 6.11 (89.34%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) | 2.97 (73.98%) | 4.68 (82.01%) | 5.93 (86.72%) |

图10 前跃轨迹实验
Fig.10 Experiments of forward jumping
| lx/m | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.00 | 4.14 (42.50%) | 18.86 (54.66%) | 3.91 (50.34%) |
| 0.08 | 4.01 (38.11%) | 11.65 (34.88%) | 2.34 (30.50%) |
| 0.16 | 3.94 (21.87%) | 7.76 (29.28%) | 1.92 (12.52%) |
| 0.24 | 3.55 (15.65%) | 4.63 (18.31%) | 0.95 (5.27%) |
表4 前跃轨迹实验,有PEA对比无PEA在峰值力矩、峰值功率、能量损耗方面的减少
Table 4 Reduction in peak torque, peak power, and energy consumption with and without PEA in the experiments of forward jumping
| lx/m | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.00 | 4.14 (42.50%) | 18.86 (54.66%) | 3.91 (50.34%) |
| 0.08 | 4.01 (38.11%) | 11.65 (34.88%) | 2.34 (30.50%) |
| 0.16 | 3.94 (21.87%) | 7.76 (29.28%) | 1.92 (12.52%) |
| 0.24 | 3.55 (15.65%) | 4.63 (18.31%) | 0.95 (5.27%) |

图11 并联弹性腿样机测试
Fig.11 Prototype experiment setup of PEA leg

图12 从电机电源输入层面验证并联弹性腿有效性
Fig.12 Effectiveness of PEA leg validated from the perspective of electricity input
| 周期/s | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) |
表5 样机实验,验证峰值电流、峰值电功率和电能损耗减少量与减少百分比
Table 5 Reduction in quantity and percentage of peak current, peak electrical power and electrical energy consumption for validating PEA’s improvements
| 周期/s | 峰值力矩/(N·m) | 峰值功率/W | 能量损耗/J |
|---|---|---|---|
| 0.5 | 4.08 (41.08%) | 19.39 (52.75%) | 2.62 (38.41%) |
| 1.0 | 4.08 (79.59%) | 10.67 (89.24%) | 5.93 (89.18%) |
| 1.5 | 3.30 (77.83%) | 6.35 (84.73%) | 5.92 (88.96%) |
| 2.0 | 2.89 (73.64%) | 4.54 (81.93%) | 5.72 (85.91%) |
| [1] |
|
| [2] |
doi: 10.1016/j.asej.2020.11.005 URL |
| [3] |
|
| [4] |
李姗姗, 王洪波, 陈建宇, 等. 新型四足并联军用机器人步态控制算法及仿真[J]. 兵工学报, 2023, 44(3): 895-909.
doi: 10.12382/bgxb.2021.0796 |
|
doi: 10.12382/bgxb.2021.0796 |
|
| [5] |
王琪, 张秀丽, 江磊, 等. 具有2DOF铰接式躯干的仿猎豹四足奔跑机器人[J]. 机器人, 2022, 44(3): 257-266.
doi: 10.13973/j.cnki.robot.210101 |
|
doi: 10.13973/j.cnki.robot.210101 |
|
| [6] |
|
| [7] |
doi: 10.1017/S0263574721001752 URL |
| [8] |
doi: 10.1016/j.robot.2021.103815 URL |
| [9] |
|
| [10] |
doi: 10.1109/TMECH.3516 URL |
| [11] |
魏敦文, 葛文杰, 高涛. 仿生灵感下的弹性驱动器的研究综述[J]. 机器人, 2017, 39(4):541-550.
doi: 10.13973/j.cnki.robot.2017.0541 |
|
doi: 10.13973/j.cnki.robot.2017.0541 |
|
| [12] |
|
| [13] |
|
| [14] |
doi: 10.1109/TMECH.2018.2871670 URL |
| [15] |
doi: 10.1109/TRO.2016.2604496 URL |
| [16] |
|
| [17] |
韩亚丽, 贾山, 王兴松. 基于人体生物力学的低功耗踝关节假肢的设计与仿真[J]. 机器人, 2013, 35(3): 276-282.
|
|
doi: 10.3724/SP.J.1218.2013.00276 URL |
|
| [18] |
doi: 10.1109/LRA.2023.3234809 URL |
| [19] |
doi: 10.1016/j.mechmachtheory.2020.103814 URL |
| [20] |
doi: 10.1109/LRA.2019.2893425 URL |
| [21] |
doi: 10.1109/TRO.2022.3197088 URL |
| [22] |
doi: 10.1109/TMECH.2021.3052037 URL |
| [23] |
doi: 10.3389/frobt.2021.713083 URL |
| [24] |
|
| [25] |
doi: 10.1016/j.simpat.2022.102629 URL |
| [1] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [2] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [3] | 桑董辉, 陈原, 高军. 由2自由度并联髋关节构成的脊柱式四足步行机器人步态规划和稳定性分析[J]. 兵工学报, 2020, 41(6): 1188-1200. |
| [4] | 刘志成, 郑莉芳, 王旭. 基于混合神经振荡器的爬行四足机器人运动协调控制[J]. 兵工学报, 2020, 41(11): 2303-2312. |
| [5] | 张云, 郭振武, 陈迪剑, 王斌锐. 基于Kimura振荡器和虚拟模型的气动肌肉四足机器人步态控制[J]. 兵工学报, 2018, 39(7): 1411-1418. |
| [6] | . 基于语义树Markov随机场模型的地面机器人多尺度道路感知[J]. 兵工学报, 2016, 37(3): 512-517. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4