
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (3): 736-747.doi: 10.12382/bgxb.2021.0782
高强1( ), 侯远龙1(), 吕明明2(), 毛斌3(), 侯润民1(), 羊书毅1(), 吴斌1()
), 侯远龙1(), 吕明明2(), 毛斌3(), 侯润民1(), 羊书毅1(), 吴斌1()
收稿日期:2021-11-17
上线日期:2022-07-02
作者简介: |
侯远龙(1964—),男,教授,主要研究领域包括机器人、多模态复合智能控制和信号处理。E-mail:houyuanlong1964@163.com; |
 |
吕明明(1987—),男,讲师,博士,主要研究方向为目标跟踪与自动控制。E-mail:lvm2021@just.edu.cn; |
 |
毛斌(1981—),男,高级工程师,主要研究方向为交直流伺服系统的智能建模与控制。E-mail:42345162@qq.com; |
 |
侯润民(1987—),男,副教授,博士,主要研究方向为智能控制算法和复杂非线性系统。E-mail:261683915@qq.com; |
 |
羊书毅(1997—),男,硕士研究生,主要研究方向为电力驱动和计算机控制系统理论。E-mail:1365363715@qq.com; |
 |
吴斌(1996—),男,硕士研究生,主要研究方向为智能制造与检测技术。E-mail:13182359068@163.com |
GAO Qiang1(), HOU Yuanlong1(), LÜ Mingming2(), MAO Bin3(), HOU Runmin1(), YANG Shuyi1(), WU Bin1()
Received:2021-11-17
Online:2022-07-02
摘要:
针对某新型车载多管负载存在内外扰动影响、行进间不易稳定的难点,设计一种扰动速度神经网络自适应补偿的稳定控制器。优化设计负载结构使耳轴两端的载荷基本平衡,减小控制过程中由于克服不平衡力矩所产生的能量消耗,以及非线性力矩干扰。稳定控制器采用PI控制计算主控制量;由扰动速度、扰动加速度作为输入构成单神经元控制器计算补偿控制量;利用扩张状态观测器观测载体行进间负载所受到的扰动速度,利用混合微分器得到扰动加速度;由扰动速度、扰动加速度构成单神经元控制器计算补偿控制量;利用RBF神经网络提供梯度信息,对速度补偿系数和加速度补偿系数进行在线学习。数值仿真及台架试验结果表明,所设计稳定控制器具有较强的自学习和自适能力,对不同频率、幅值的扰动均具有鲁棒性,参数学习时间小于3.7 s,积分位置误差均方差小于0.33 mil,由此验证了所提出控制策略对于提高某新型车载多管负载稳定控制精度的可行性和有效性。
高强, 侯远龙, 吕明明, 毛斌, 侯润民, 羊书毅, 吴斌. 某新型车载多管负载行进间稳定控制方法[J]. 兵工学报, 2023, 44(3): 736-747.
GAO Qiang, HOU Yuanlong, LÜ Mingming, MAO Bin, HOU Runmin, YANG Shuyi, WU Bin. A Marching Stable Control Method for a New Vehicle-Mounted Multi-Tube Load[J]. Acta Armamentarii, 2023, 44(3): 736-747.
图1 某新型车载多管负载系统结构示意图
Fig. 1 Structural diagram of a new vehicle-mounted multi-tube load system
图2 控制原理框图
Fig. 2 Block diagram of the controller
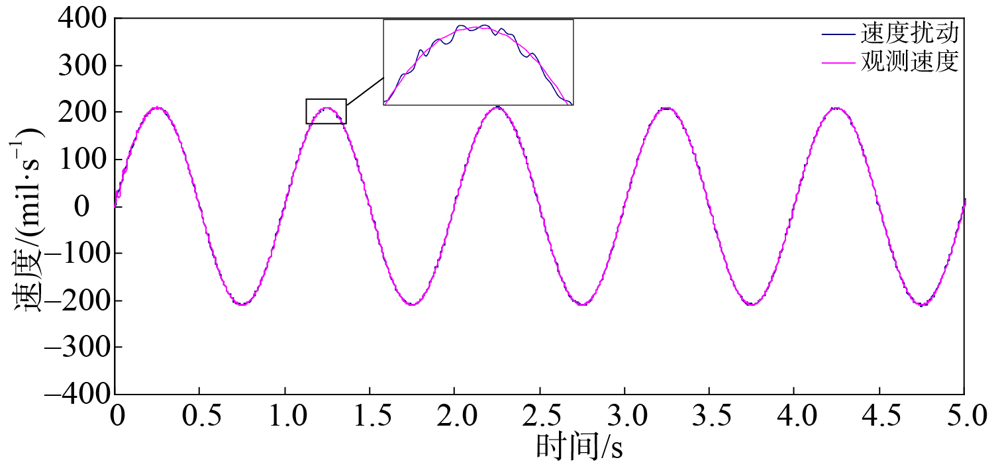
图3 正弦速度扰动观测图
Fig. 3 Diagram of Sine velocity disturbance observations
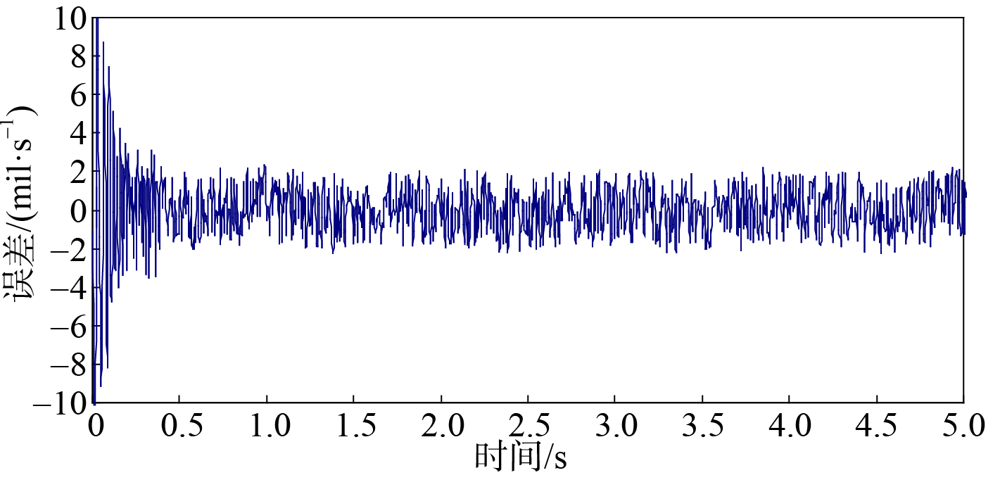
图4 正弦速度扰动观测误差图
Fig. 4 Diagram of Sine velocity disturbance observation errors
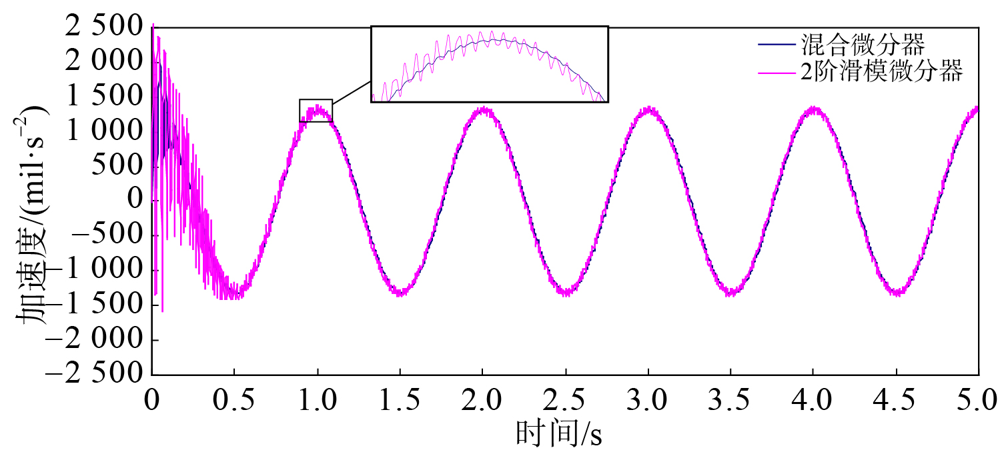
图5 扰动加速度对比图
Fig. 5 Comparison of disturbed accelerations
图6 扰动0.25Hz/0.5○积分位置误差图
Fig. 6 Position errors for the disturbance of 0.25 Hz/0.5○
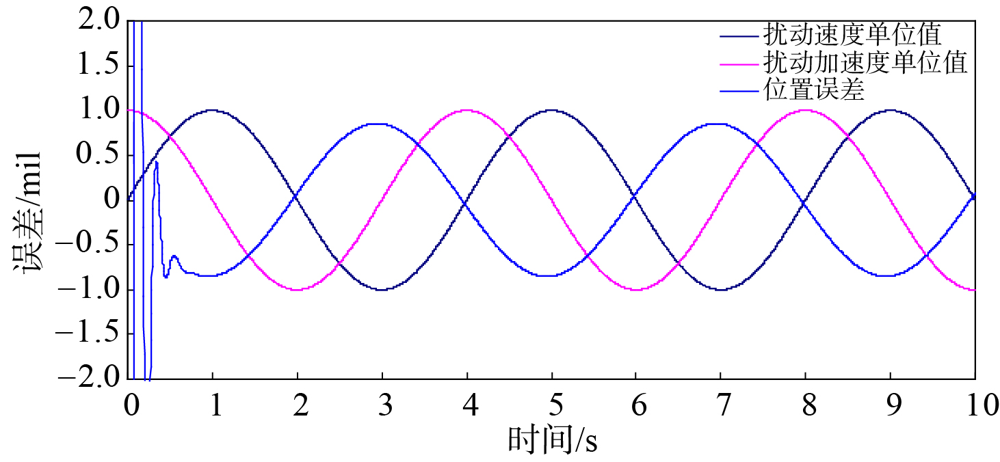
图7 扰动0.25 Hz/2.0○积分位置误差图
Fig. 7 Position errors for the disturbance of 0.25 Hz/2.0○
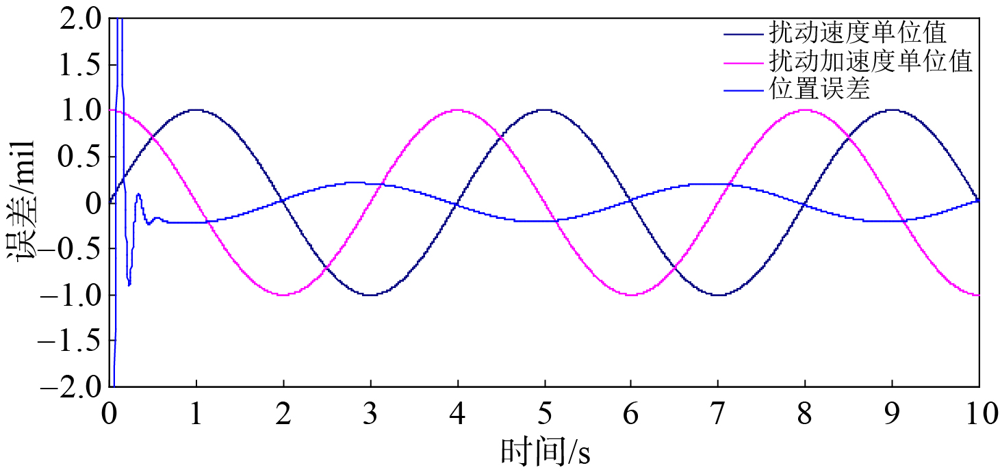
图8 神经网络学习的扰动0.25 Hz/2.0○积分位置误差图
Fig. 8 Position errors for the disturbance of 0.25 Hz/2.0○ with NN
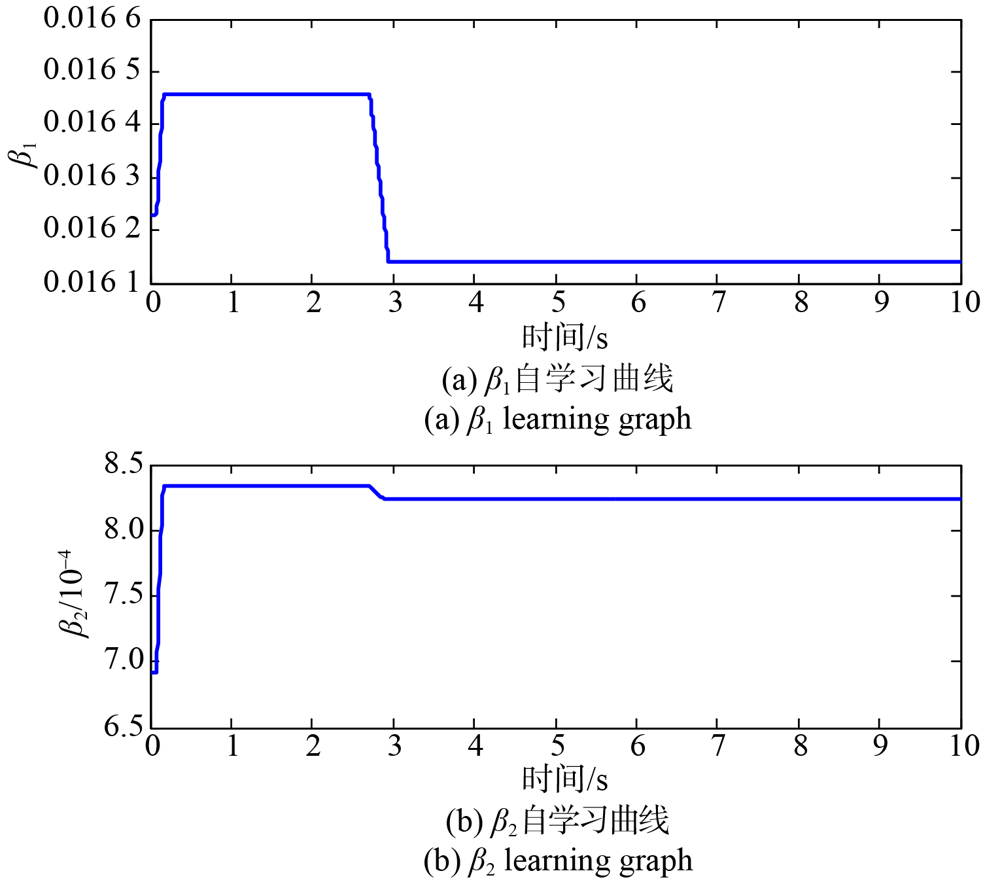
图9 扰动0.25 Hz/2.0○ 时β1 和 β2自学习曲线
Fig. 9 β1 and β2 learning curves for the disturbance of 0.25 Hz/2.0○
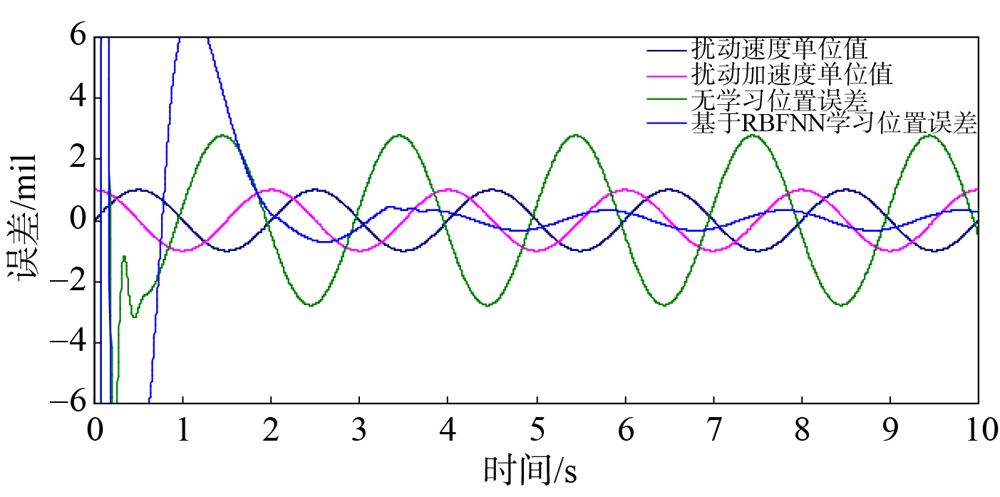
图10 神经网络学习的扰动0.5 Hz/4.0○积分位置误差图
Fig. 10 Position errors for the disturbance of 0.5 Hz/4.0○ with NN
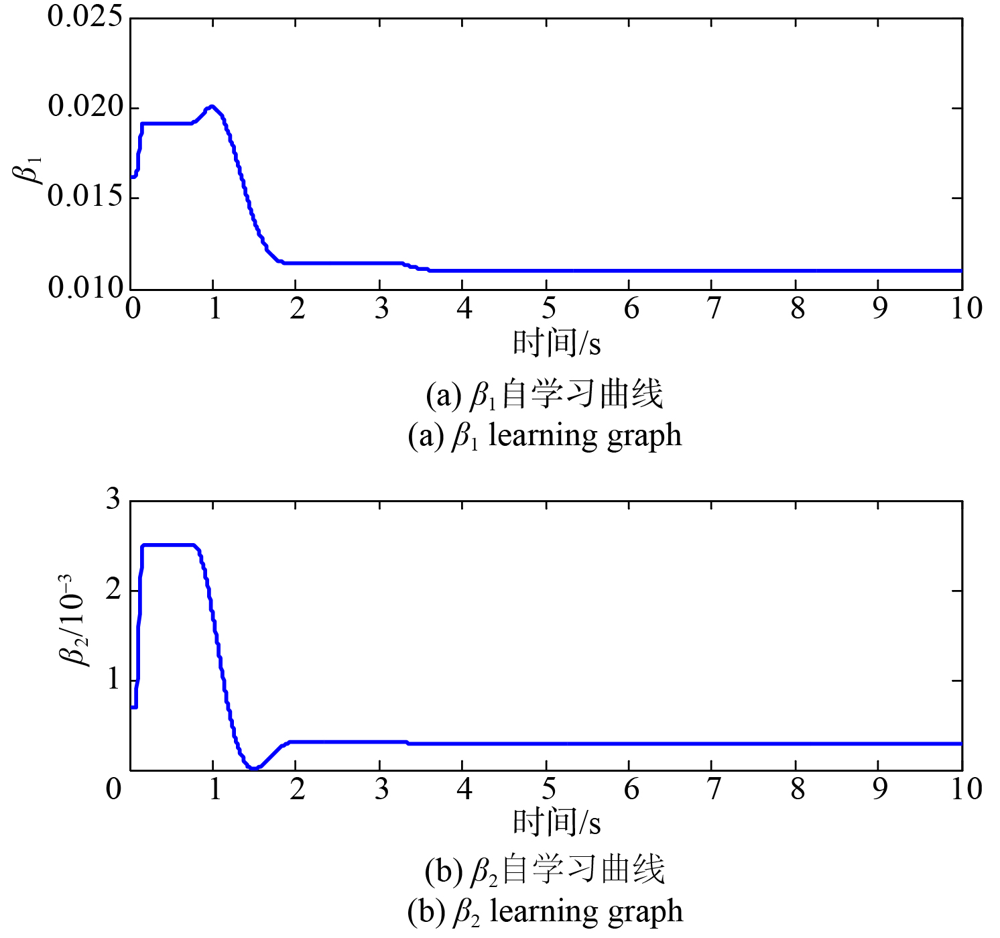
图11 扰动0.5 Hz/4.0○ 时β1和 β2自学习曲线
Fig.11 β1 and β2 learning graph of disturbance 0.5 Hz/4.0○
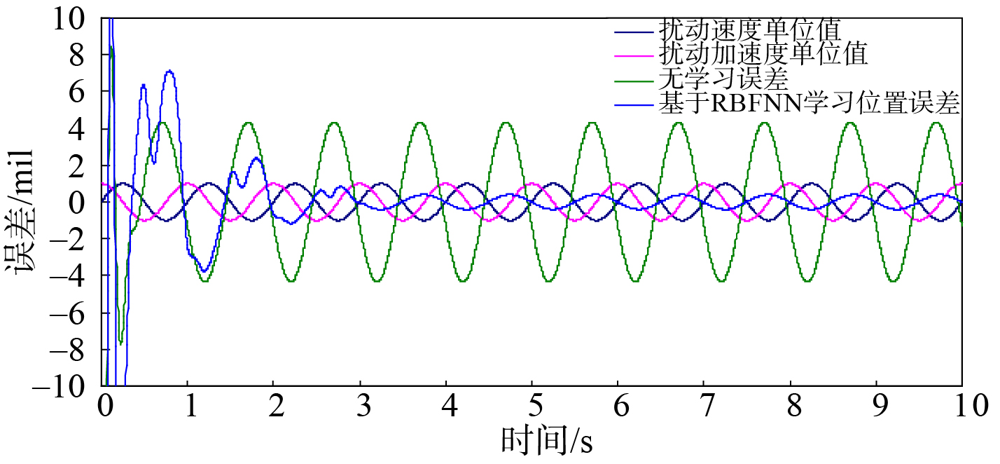
图12 神经网络学习的扰动1.0 Hz/2.0○积分位置误差图
Fig. 12 Position errors for the disturbance of 1.0 Hz/2.0○ with NN
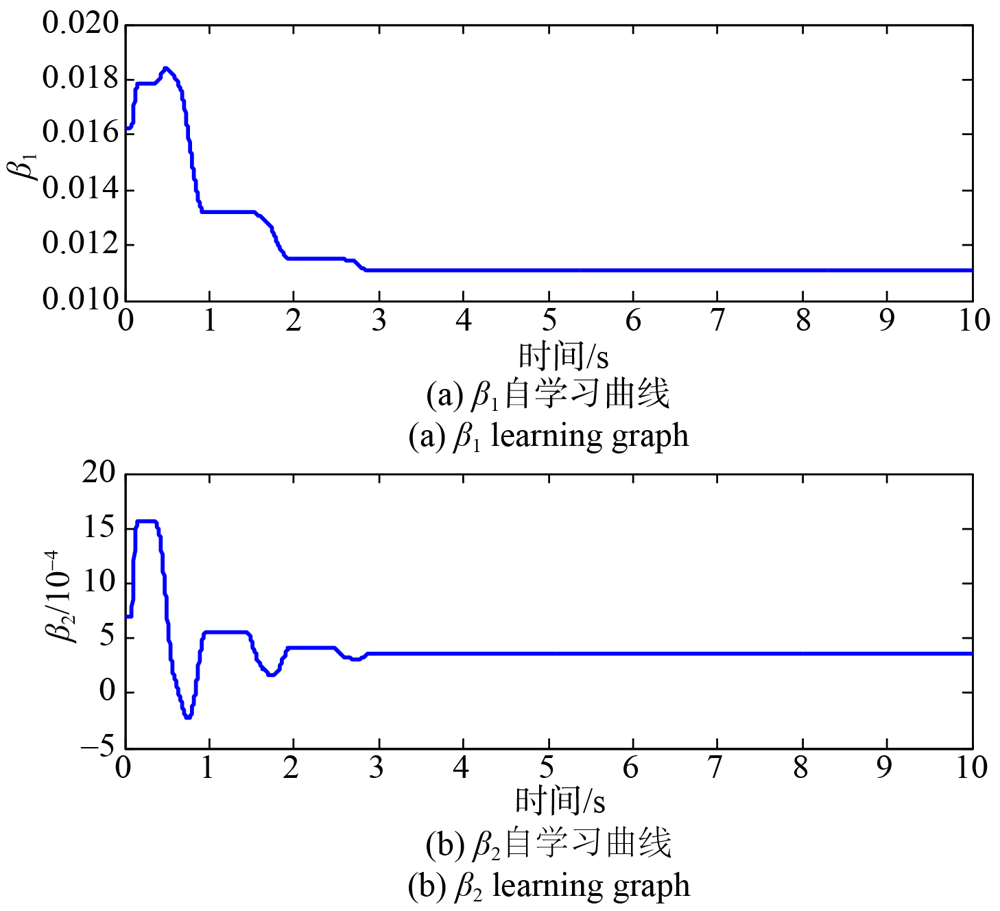
图13 扰动1.0 Hz/2.0○ 时β1 和 β2自学习曲线
Fig.13 β1 and β2 learning graph of disturbance 1.0 Hz/2.0○
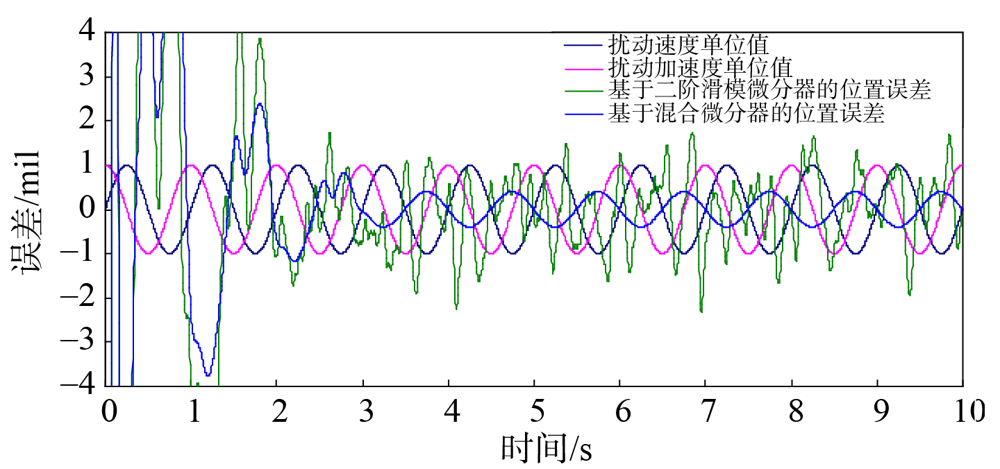
图14 混合微分器和SOSMD位置误差对比图
Fig. 14 Comparison of position errors using HD and SOSMD

图15 摇摆台图
Fig. 15 Stewart platform

图16 摇摆台上位机操作界面
Fig. 16 Operational interface of the host computer of a Stewart platform
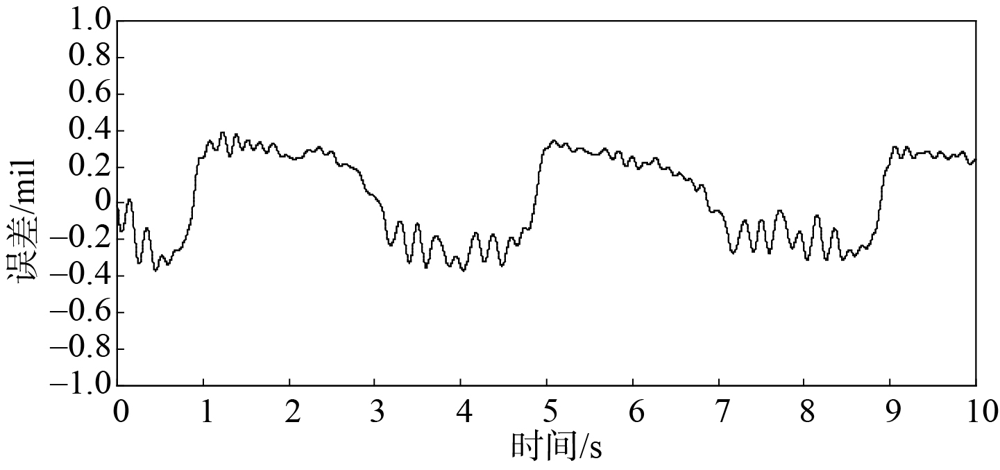
图17 扰动0.25 Hz/2.0○时摇摆台试验积分位置误差图
Fig. 17 Position errors for the disturbance of 0.25 Hz/2.0○ on a Stewart platform
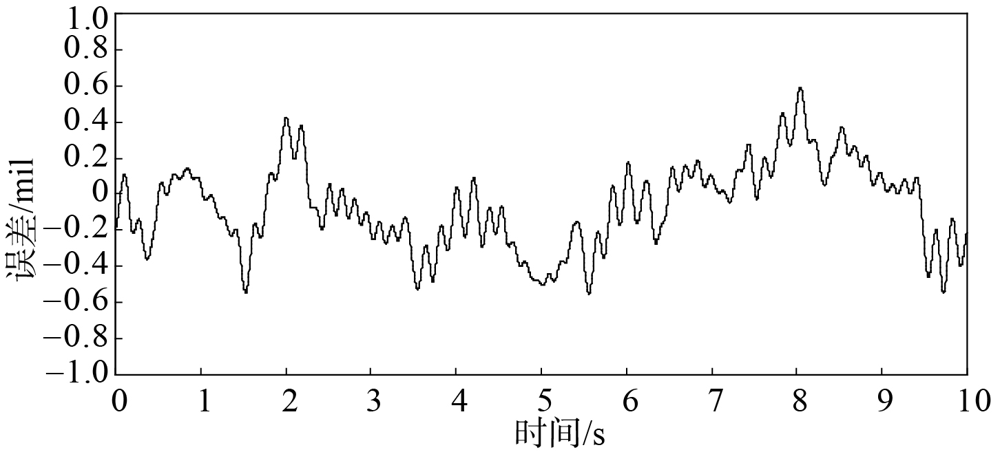
图18 扰动0.5 Hz/4.0○时摇摆台试验积分位置误差图
Fig. 18 Position errors for the disturbance of 0.5 Hz/4.0○ on a Stewart platform
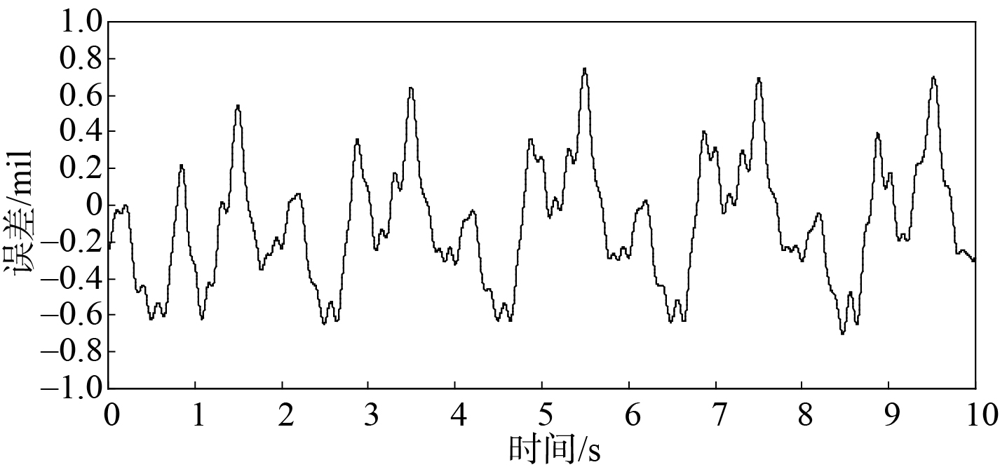
图19 扰动1.0 Hz/2.0○时摇摆台试验积分位置误差图
Fig. 19 Position errors for the disturbance of 1.0 Hz/2.0○ on a Stewart platform
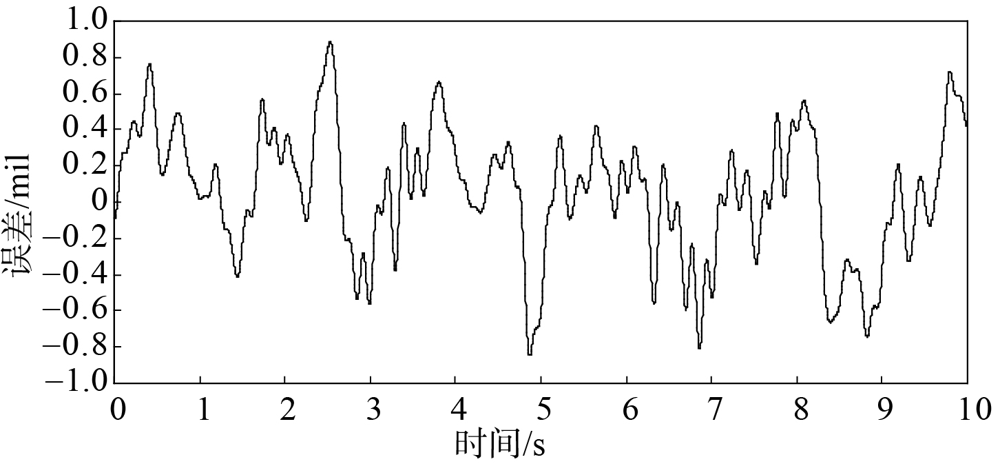
图20 扰动1.0 Hz/2.0○,跟踪速度0.5○/s时摇摆台试验积分位置误差图
Fig. 20 Position errors for the disturbance of 1.0 Hz/2.0○ , tracking speed of 0.5○/s on a Stewart platform
| [1] |
|
| [2] |
doi: 10.1016/j.isatra.2017.04.010 URL |
| [3] |
王荣林, 陆宝春, 侯润民, 等. 交流伺服系统分数阶PID改进型自抗扰控制[J]. 中国机械工程, 2019, 30(16):1989-1995.
|
|
|
|
| [4] |
高强, 侯润民, 杨国来, 等. 基于分数阶神经滑模的某顶置火炮调炮控制[J]. 兵工学报, 2013, 34(10):1311-1317.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 10. 018 |
|
doi: 10. 3969/ j. issn. 1000-1093. 2013. 10. 018 |
|
| [5] |
冯亮, 马晓军, 李华. 基于扩张状态观测器滤波的坦克炮控系统模型参考自适应控制[J]. 兵工学报, 2009, 30(10):1375-1381.
|
|
|
|
| [6] |
李伟, 姜俊峰, 任海波, 等. 行进间火炮指向稳定跟踪系统建模与控制[J]. 兵工学报, 2018, 39(8):1479-1490.
doi: 10.3969/j.issn.1000-1093.2018.08.004 |
|
|
|
| [7] |
|
| [8] |
doi: 10.1007/s12555-019-1029-x |
| [9] |
doi: 10.1016/j.isatra.2015.12.014 URL |
| [10] |
doi: 10.1016/j.ast.2018.06.017 URL |
| [11] |
|
| [12] |
柯栋梁, 汪凤翔, 李家祥. 基于自适应高增益观测器的永磁同步电机预测电流控制方法[J]. 中国电机工程学报, 2021, 41(2):728-737.
|
|
|
|
| [13] |
潘月斗, 陈虎. 基于高增益观测技术的高精度感应电机磁链观测器研究[J]. 控制与决策, 2014, 29(8):1495-1500.
|
|
|
|
| [14] |
韩京清, 袁露林. 跟踪-微分器的离散形式[J]. 系统科学与数学, 1999, 19(3):268-273.
|
|
|
|
| [15] |
郑怀航, 王军政, 刘冬琛, 等. 融合前馈与姿态预测的并联稳定平台自抗扰控制策略[J]. 机械工程学报, 2021, 57(9): 19-27.
doi: 10.3901/JME.2021.09.019 |
|
doi: 10.3901/JME.2021.09.019 |
|
| [16] |
路遥. 基于跟踪微分器的高超声速飞行器Backstepping 控制[J]. 航空学报, 2021, 42(X):324737.
|
|
|
|
| [17] |
doi: 10.1016/S0005-1098(97)00209-4 URL |
| [18] |
doi: 10.1109/ACCESS.2021.3088544 URL |
| [19] |
那靖, 董宇, 丁海港, 等. 含执行机构未知动态的液压伺服系统输出反馈控制[J]. 控制与决策, 2020, 35(5):1078-1084.
|
|
|
|
| [20] |
王新华, 陈增强, 袁著祉. 全程快速非线性跟踪-微分器[J]. 控制理论与应用, 2003, 20(6):875-878.
|
|
|
|
| [21] |
邵星灵, 王宏伦, 张惠平, 等. 基于微分器的轨迹线性化控制方法及其应用[J]. 北京航空航天大学学报, 2015, 41(7):1259-1268.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
周振雄, 杨建东, 曲永印, 等. 基于自抗扰控制器的磁浮平台水平推力控制[J]. 机械工程学报, 2008, 44(9):193-199.
|
|
|
|
| [26] |
周振雄, 曲永印, 杨建东, 等. 一种改进型ADRC实现的机床进给用永磁直线同步电动机调速系统[J]. 中国机械工程, 2008, 19(21): 2561-2565.
|
|
|
|
| [27] |
周振雄, 曲永印, 杨建东, 等. 采用改进型自抗扰控制器的平面磁轴承悬浮控制[J]. 电工技术学报, 2010, 25(6):31-38.
|
|
|
|
| [28] |
|
| [29] |
doi: 10.1017/S0263574718001005 URL |
| [1] | 张天艺, 郑颖, 裘信国, 季行健, 金晓航. 基于特征模型的5阶关节伺服系统扰动补偿策略[J]. 兵工学报, 2024, 45(1): 276-287. |
| [2] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [3] | 王治霖, 王江, 祁琪, 范世鹏. 基于LESO的新型自适应鲁棒滚转通道控制算法[J]. 兵工学报, 2023, 44(7): 1920-1929. |
| [4] | 余跃, 王宏伦. 基于深度学习的高超声速飞行器再入预测校正容错制导[J]. 兵工学报, 2020, 41(4): 656-669. |
| [5] | 王俭臣, 齐晓慧. 基于气动参数辨识的飞控系统传感器故障估计[J]. 兵工学报, 2015, 36(1): 103-110. |
| [6] | 郑颖, 马大为, 姚建勇, 胡健. 火箭炮位置伺服系统自抗扰控制[J]. 兵工学报, 2014, 35(5): 597-603. |
| [7] | 齐晓慧, 李杰, 韩帅涛. 基于BP 神经网络的自适应自抗扰控制及仿真[J]. 兵工学报, 2013, 34(6): 776-782. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4