
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (3): 841-850.doi: 10.12382/bgxb.2021.0800
熊光明( ), 于全富(), 胡秀中(), 周子杰(), 许佳慧()
), 于全富(), 胡秀中(), 周子杰(), 许佳慧()
收稿日期:2021-11-25
上线日期:2022-06-15
作者简介: |
于全富(1997—),男,硕士研究生。E-mail:3120200424@bit.edu.cn; |
 |
胡秀中(1997—),男,硕士研究生。E-mail:3120210302@bit.edu.cn; |
 |
周子杰(2000—),男,硕士研究生。E-mail:a121884344@qq.com; |
 |
许佳慧(2000—),女,硕士研究生。E-mail:3120220416@bit.edu.cn |
XIONG Guangming(), YU Quanfu(), HU Xiuzhong(), ZHOU Zijie(), XU Jiahui()
Received:2021-11-25
Online:2022-06-15
摘要:
针对在多层建筑物内无人平台的自主导航问题,提出一种考虑平台特性的运动规划框架。根据履带式平台的特点,采用零半径转向运动基元方案,并引入维诺路径,提高了全局规划在狭窄环境中的灵活性与安全性。经过分段三次Hermite插值得到平滑的全局路径。基于履带式平台运动模型,在轨迹预测的基础上,利用波阵值来提高局部规划算法在障碍物信息失准情况下的鲁棒性,并结合有限状态机决策模型,实现多楼层间的自主导航任务。对算法进行了仿真与实车实验验证。研究结果表明,新算法能够更好地适应室内环境空间狭窄的特点,同时也证明了在实际环境中的可行性。
熊光明, 于全富, 胡秀中, 周子杰, 许佳慧. 考虑平台特性的多层建筑物内履带式无人平台运动规划[J]. 兵工学报, 2023, 44(3): 841-850.
XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles[J]. Acta Armamentarii, 2023, 44(3): 841-850.
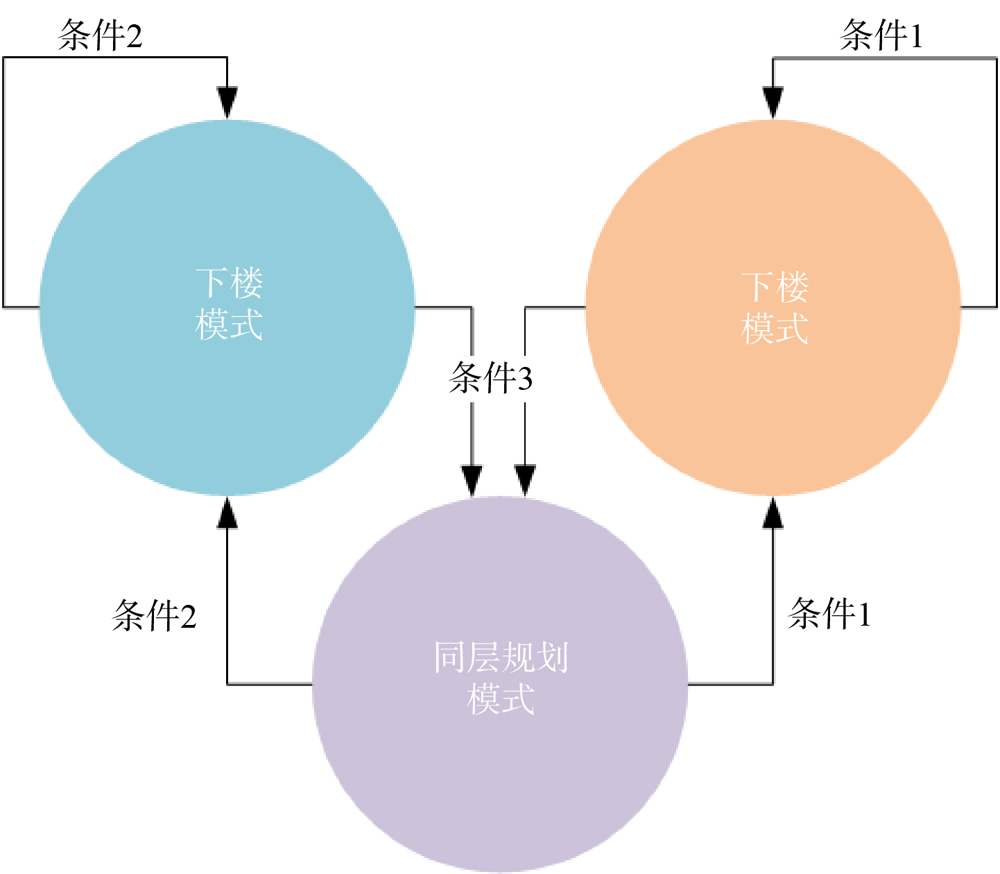
图1 有限状态机决策模型示意图
Fig. 1 Schematic diagram of Finite State Machine decision model
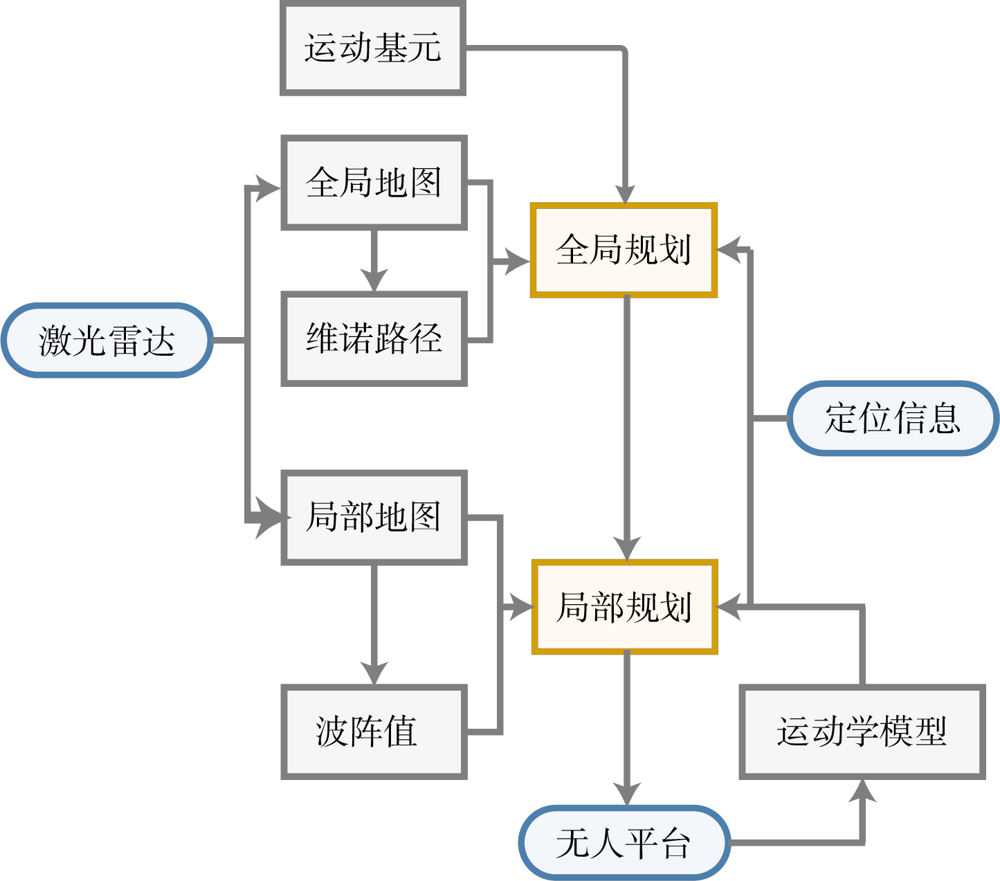
图2 同楼层运动规划框架示意图
Fig. 2 Schematic diagram of motion planning framework
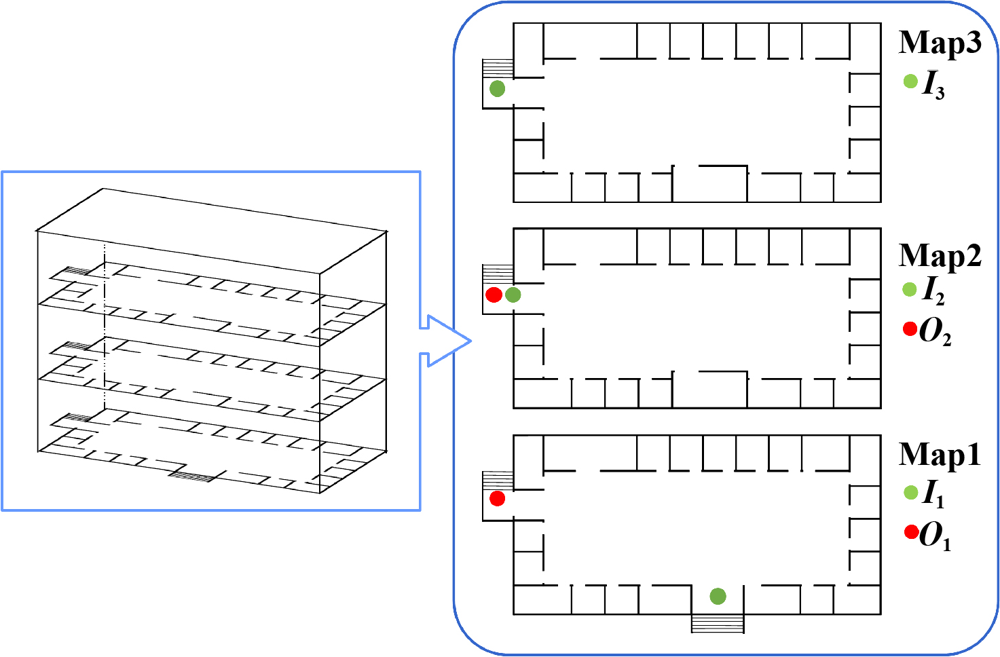
图3 多层建筑物环境地图示意图
Fig. 3 Schematic diagram of the multi-storey building hierarchical map
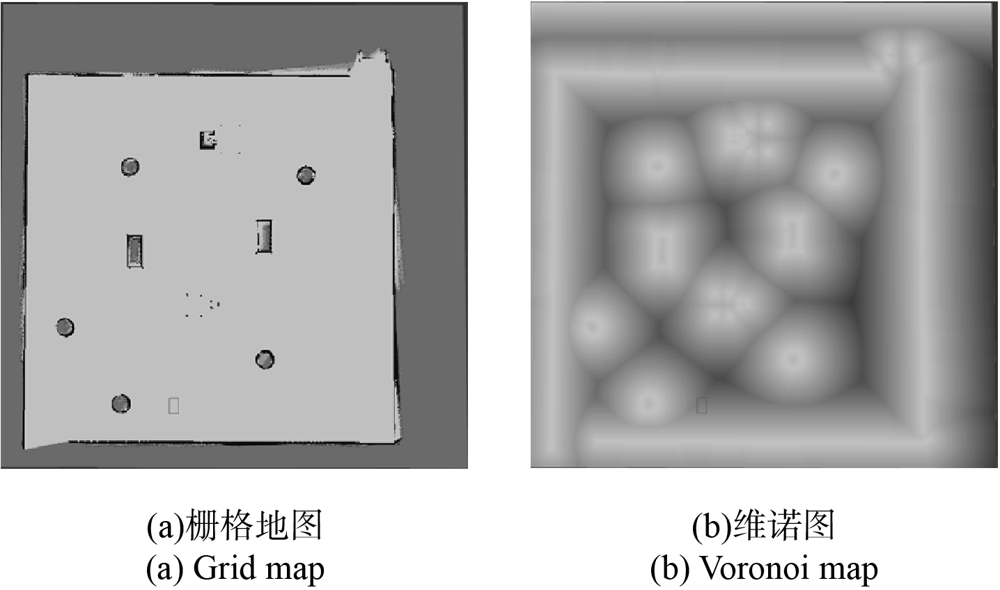
图4 室内环境栅格地图及其维诺图
Fig. 4 Grid map of an indoor environment and its Voronoi map

图5 传统运动基元方案示意图
Fig. 5 Schematic diagram of traditional motion primitives
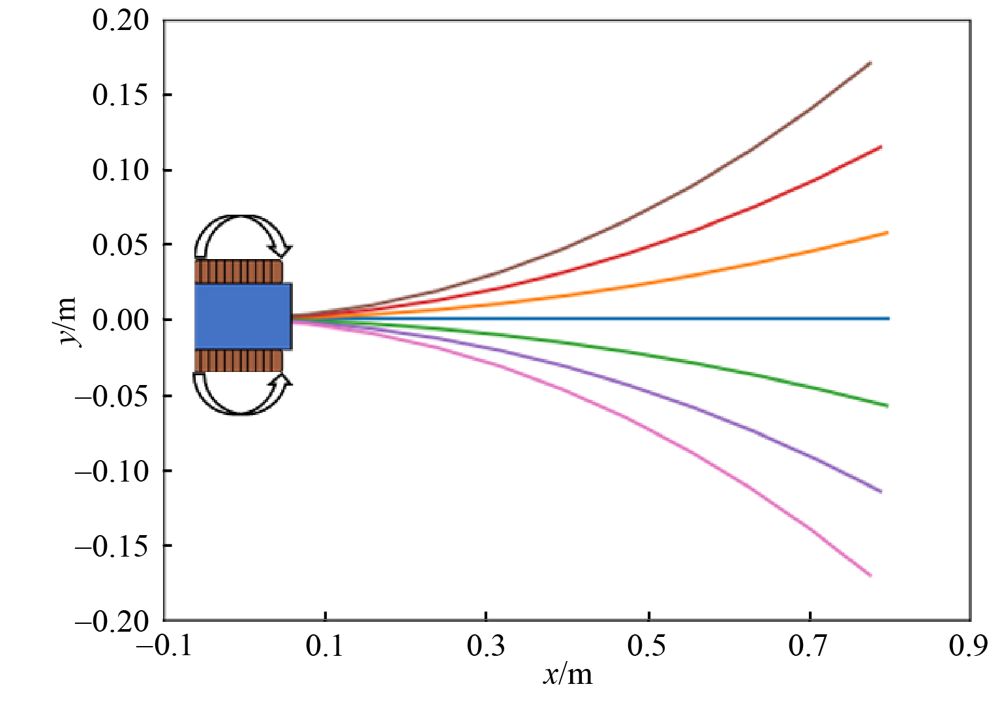
图6 零半径运动基元方案示意图
Fig. 6 Schematic diagram of zero-radius motion primitives
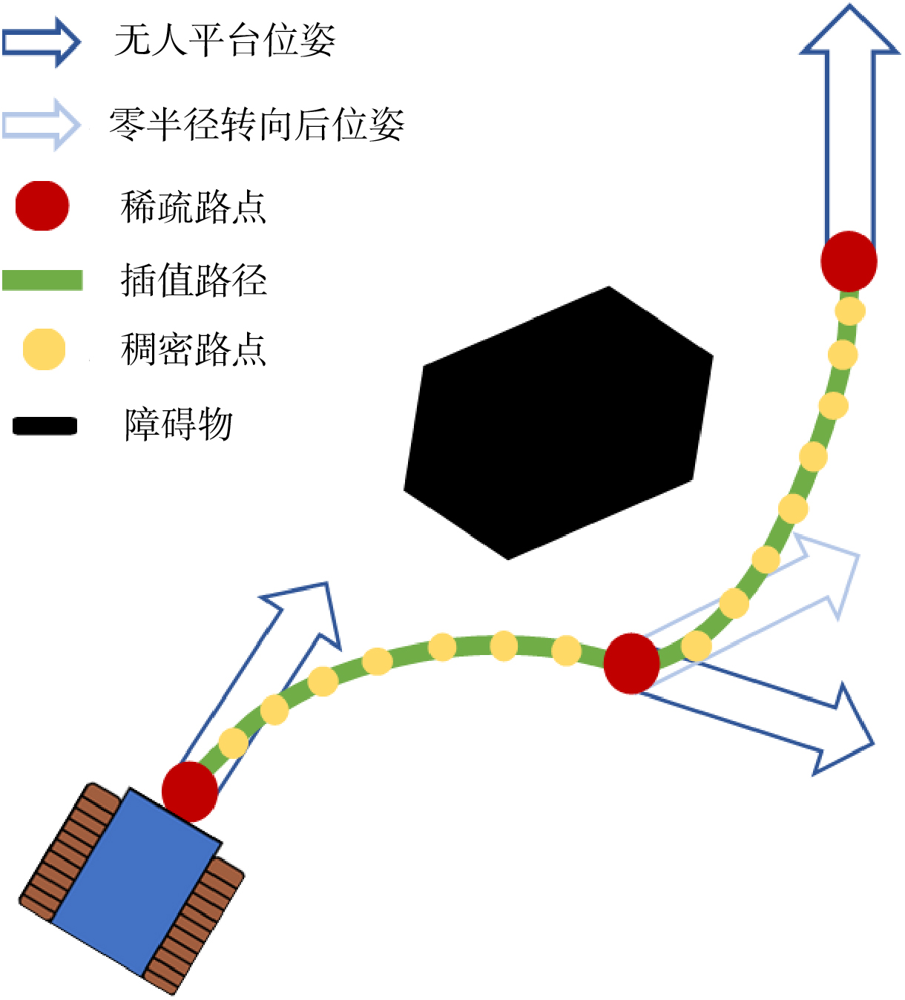
图7 路径平滑示意图
Fig. 7 Schematic diagram of path smoothing
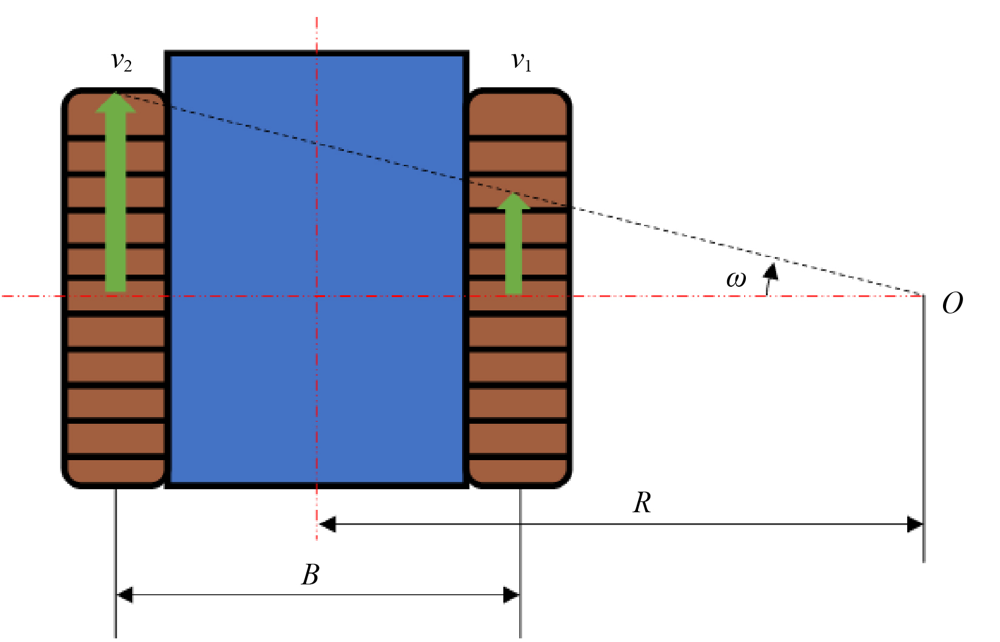
图8 履带式无人平台运动几何关系示意图
Fig. 8 Schematic diagram of the kinematic geometric relationship of the tracked unmanned platform

图9 轨迹预测示意图
Fig. 9 Schematic diagram of trajectory prediction
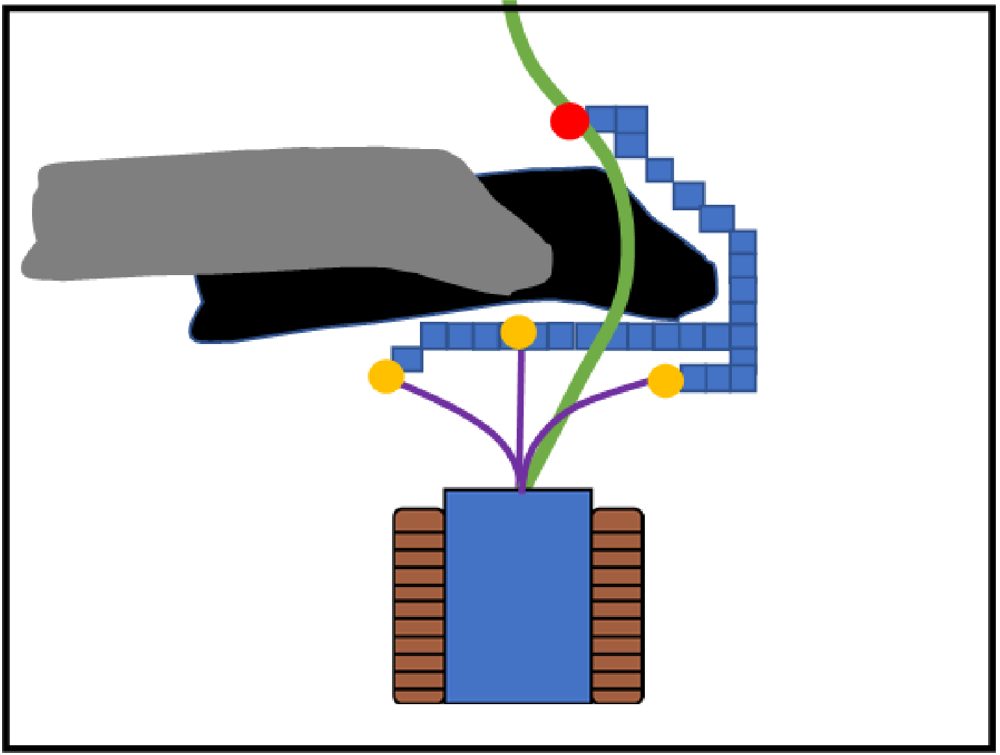
图10 波阵值避免局部最小示意图
Fig. 10 Schematic diagram of Wavefront Value avoiding local minimum

图11 仿真环境示意图
Fig. 11 Schematic diagram of the simulation environment
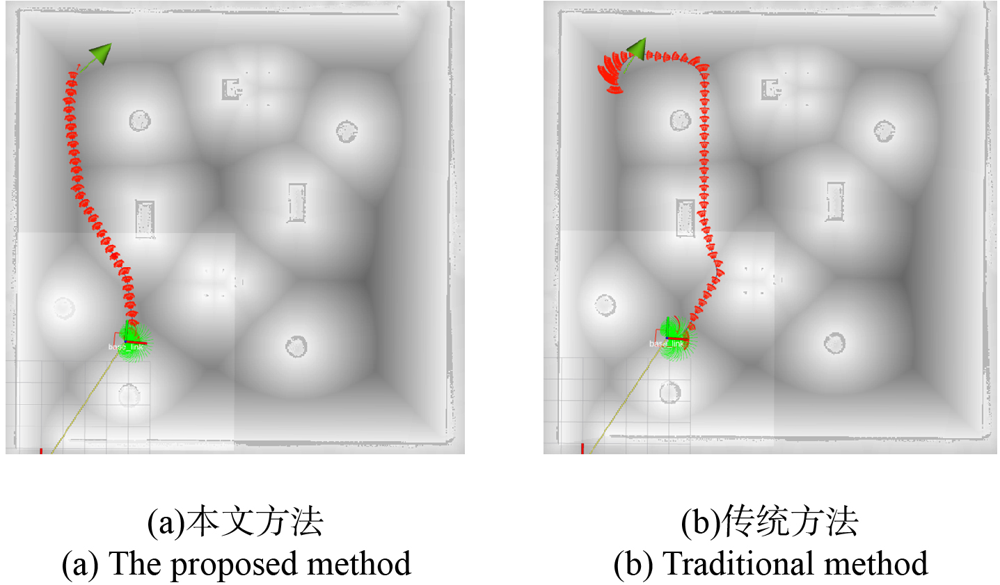
图12 全局规划仿真结果对比图
Fig. 12 Comparison of the global planner’s simulation results
| 算法 | 扩展基元数量/个 | 路径长度/m | 搜索耗时/ms |
|---|---|---|---|
| 传统基元A* | 452 | 18.0 | 36.8 |
| 本文算法 | 466 | 12.4 | 39.2 |
表1 全局规划仿真结果
Table 1 Simulation results of the global planner
| 算法 | 扩展基元数量/个 | 路径长度/m | 搜索耗时/ms |
|---|---|---|---|
| 传统基元A* | 452 | 18.0 | 36.8 |
| 本文算法 | 466 | 12.4 | 39.2 |

图13 局部规划仿真对比图(左为遇到障碍物,右为绕过障碍物)
Fig. 13 Comparison of the local planner’s simulation results (left picture shows encountering obstacles, right picture shows bypassing obstacles)

图14 实验无人平台外观
Fig. 14 Appearance of the unmanned platform in the experiment

图15 实验起始点与目标点
Fig. 15 Starting point and target point in the experiment
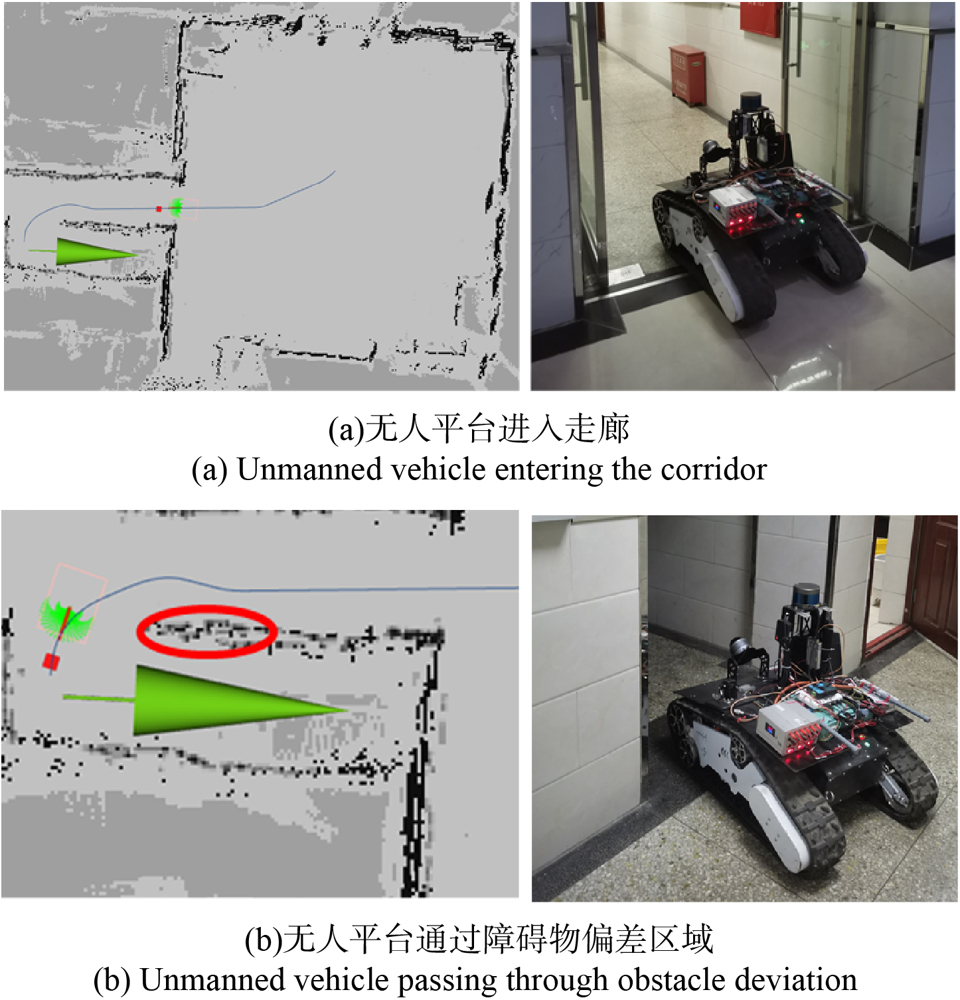
图16 1层楼内实验结果(左为规划路径,右为实景)
Fig. 16 Experimental results of the first floor (the left is the planned path, and the right is the real scene)

图17 楼梯区域实验结果
Fig. 17 Experimental results of the stair area

图18 转台区域实验结果
Fig. 18 Experimental results of the platform area

图19 第3层楼实验结果(左为规划路径,右为实景)
Fig.19 Experimental results on the third floor (the left is the planned path, right is the real scene)
| 阶段 | 路径长度/m | 实际运动时间/s | 平均速度/(m·s-1) | 最大速度/(m·s-1) |
|---|---|---|---|---|
| 第1层区域 | 15.2 | 77 | 0.20 | 0.4 |
| 楼梯区域 | 40.6 | 463 | 0.10 | 0.2 |
| 第3层区域 | 23.7 | 152 | 0.16 | 0.4 |
表2 实车实验结果
Table 2 Results of the experiment
| 阶段 | 路径长度/m | 实际运动时间/s | 平均速度/(m·s-1) | 最大速度/(m·s-1) |
|---|---|---|---|---|
| 第1层区域 | 15.2 | 77 | 0.20 | 0.4 |
| 楼梯区域 | 40.6 | 463 | 0.10 | 0.2 |
| 第3层区域 | 23.7 | 152 | 0.16 | 0.4 |
| [1] |
DARPA. DARPA Announces subterranean (SubT) challenge final event site and date[EB/OL]. [2021-07-01]. https://www.darpa.mil/news-events/2020-01-07.
|
| [2] |
全军武器信息采购网. “跨越险阻2021”第四届陆上无人系统挑战赛赛事通知[EB/OL]. [2021-06-03]. http://www.weain.mil.cn/cggg/jdgg/1400087198603255810.shtml.
|
|
All army weapon information procurement network. Notice of the fourth "Crossing Obstacles 2021" land unmanned system challenge[EB/OL]. [2021-06-03]. http://www.weain.mil.cn/cggg/jdgg/1400087198603255810.shtml. (in Chinese)
|
|
| [3] |
|
| [4] |
doi: 10.1002/rob.21462 URL |
| [5] |
doi: 10.1177/0278364902021010841 URL |
| [6] |
doi: 10.1177/0278364906075328 URL |
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
doi: 10.1109/TITS.2021.3054921 URL |
| [14] |
|
| [15] |
夏娜, 束强, 赵青, 等. 基于维诺图和二分图的水面移动基站路径规划方法[J]. 自动化学报, 2016, 42(8):1185-1197.
|
|
|
|
| [16] |
doi: 10.1109/TASE.2020.3016276 URL |
| [17] |
doi: 10.1007/s11548-019-01923-3 |
| [18] |
|
| [19] |
王威, 陈慧岩, 马建昊, 等. 基于Frenet坐标系和控制延时补偿的智能车辆路径跟踪[J]. 兵工学报, 2019, 40(11):2336-2351.
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
doi: 10.3969/j.issn.1000-1093.2019.11.019 |
|
| [20] |
|
| [21] |
|
| [1] | 赵熙俊, 崔星, 李兆冬, 王一全, 杨雨. 编队机动自适应车间距保持控制[J]. 兵工学报, 2023, 44(S2): 44-51. |
| [2] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [3] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [4] | 王博洋, 关海杰, 龚建伟, 陈慧岩, 赵卉菁. 面向异构履带车辆的统一运动规划方法[J]. 兵工学报, 2022, 43(2): 241-251. |
| [5] | 戴宗武, 张少甫, 刘乃强, 胡月, 王喆, 段岑薇, 孙宇哲. 用于自主导航的SAR/多普勒雷达一体化技术设计[J]. 兵工学报, 2022, 43(12): 3093-3102. |
| [6] | 陈雨荻, 熊智, 刘建业, 杨闯, 晁丽君, 彭杨. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43(11): 2965-2980. |
| [7] | 邹渊, 焦飞翔, 崔星, 张旭东, 张彬. 地面无人平台动力源集成技术发展综述[J]. 兵工学报, 2020, 41(10): 2131-2144. |
| [8] | 陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10): 1696-1706. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4