
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (S2): 97-104.doi: 10.12382/bgxb.2024.0860
李丹, 于邵祯, 杨华东*( )
)
收稿日期:2024-09-19
上线日期:2024-12-12
通讯作者:
LI Dan, YU Shaozhen, YANG Huadong*()
Received:2024-09-19
Online:2024-12-12
摘要:
水面无人艇(Unmanned Surface Vehicles,USV)具有机动性好、隐蔽性强、活动范围广等优点,在侦查、反潜、搜救等任务中具有广阔的应用前景,而环境感知技术是USV执行任务的基础,受到广泛关注。对国外USV环境感知技术发展现状进行调研,通过具体案例对USV环境感知技术进行定义并剖析任务难点;结合USV使用的感知设备,从单模态感知和多模态感知两个角度具体分析USV感知技术研究现状;总结分析USV暂未解决的难点并对USV环境感知技术发展给予展望。
李丹, 于邵祯, 杨华东. 国外水面无人艇环境感知技术前沿进展[J]. 兵工学报, 2024, 45(S2): 97-104.
LI Dan, YU Shaozhen, YANG Huadong. Progress on Environmental Perception Technology of Foreign Unmanned Surface Vehicles[J]. Acta Armamentarii, 2024, 45(S2): 97-104.

图1 海上猎人号示意图[2]
Fig.1 Schematic diagram of the Sea Hunter
| 传感器 类型 | 探测距离 | 信息 内容 | 优点 | 缺点 |
|---|---|---|---|---|
| 可见光 传感器 | 10~5km | 可见光 视频 | 分辨率高、信息内容丰富 | 易受干扰,黑暗环境无法工作 |
| 红外 传感器 | 10~500m | 红外视频 | 抗干扰能力强、可在夜间工作 | 分辨率较低,探测范围有限 |
| 扫描雷达 | 100~10km | 雷达点云 | 范围广、抗干扰能力强 | 信息内容较少、精度低 |
| 激光雷达 | 1~100m | 雷达点云 | 精度高 | 探测范围较弱 |
| 航海雷达 | 1~100km | 雷达点云 | 探测范围广 | 精度低 |
| 惯导 | 船舶姿态、 位置 | 自主导航、结构简单 | 计算量大、误差累积 |
表1 USV常见传感器
Table 1 Common Sensors for unmanned surface vehicle
| 传感器 类型 | 探测距离 | 信息 内容 | 优点 | 缺点 |
|---|---|---|---|---|
| 可见光 传感器 | 10~5km | 可见光 视频 | 分辨率高、信息内容丰富 | 易受干扰,黑暗环境无法工作 |
| 红外 传感器 | 10~500m | 红外视频 | 抗干扰能力强、可在夜间工作 | 分辨率较低,探测范围有限 |
| 扫描雷达 | 100~10km | 雷达点云 | 范围广、抗干扰能力强 | 信息内容较少、精度低 |
| 激光雷达 | 1~100m | 雷达点云 | 精度高 | 探测范围较弱 |
| 航海雷达 | 1~100km | 雷达点云 | 探测范围广 | 精度低 |
| 惯导 | 船舶姿态、 位置 | 自主导航、结构简单 | 计算量大、误差累积 |

图2 USV主要工作环境
Fig.2 Main working environments for unmanned surface vehicles

图3 凸优化模型的图像增强方法效果[14]
Fig.3 Image enhancement effect of improved convex optimization model[14]

图4 红外海面小目标识别效果[19]
Fig.4 Result of thermal object detection[19]
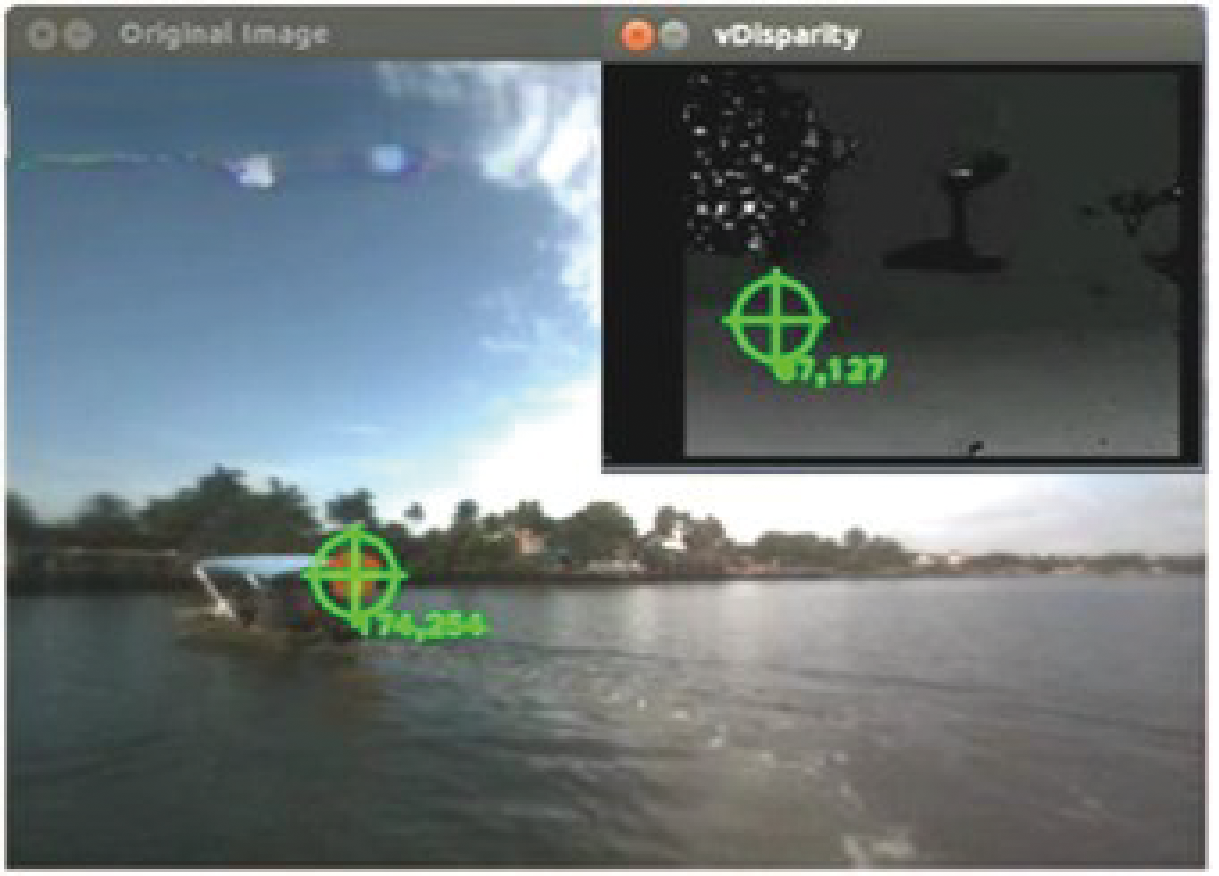
图5 USV目标跟踪效果[22]
Fig.5 Result of USV Object Tracking[22]

图6 航海雷达SLAM建图[25]
Fig.6 Maritime radar SLAM mapping[25]
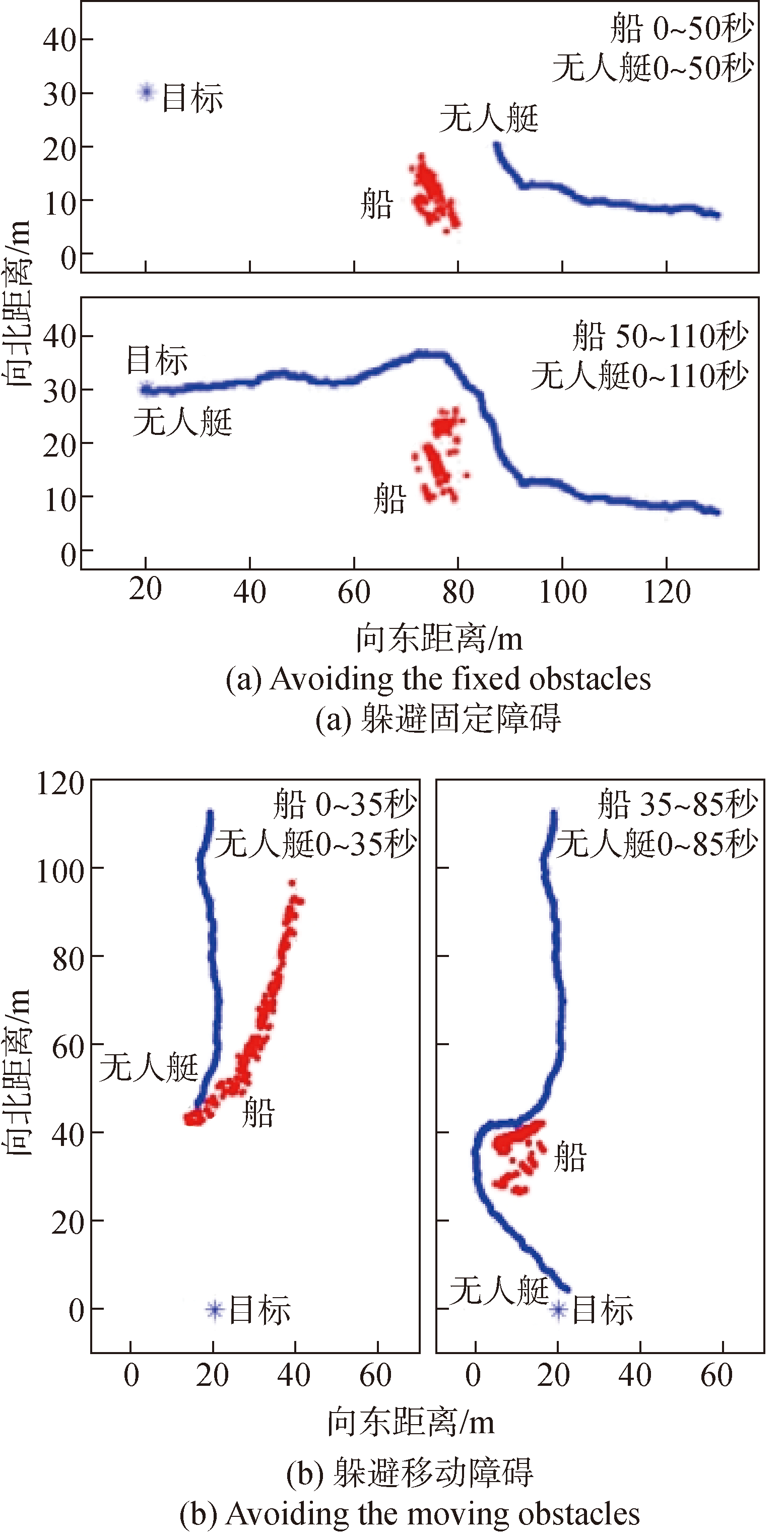
图7 使用激光雷达在实际港口避障效果图[31]
Fig.7 Obstacle avoidance effect in actual ports using LiDAR[31]
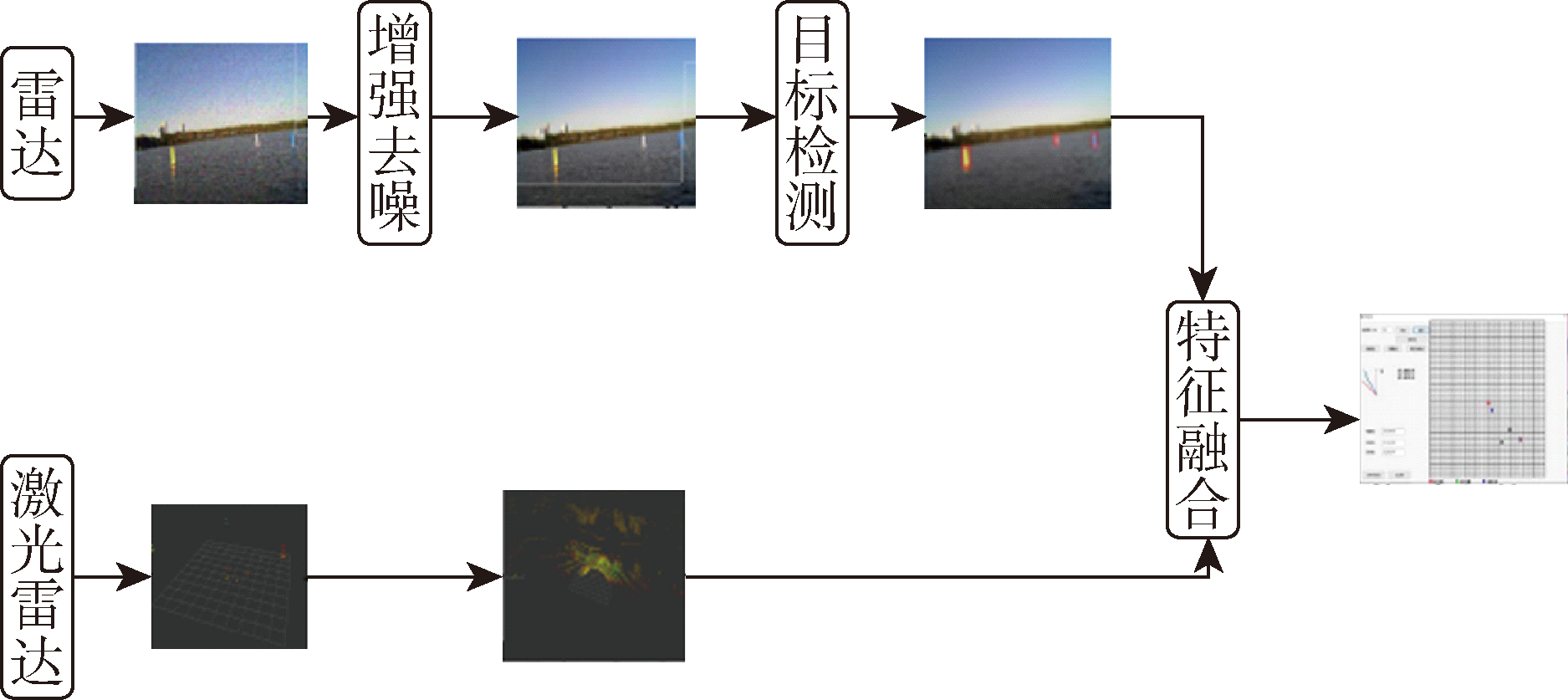
图8 结合视觉传感器与雷达的环境感知
Fig.8 Environmental perception scheme combining visual sensors and radar
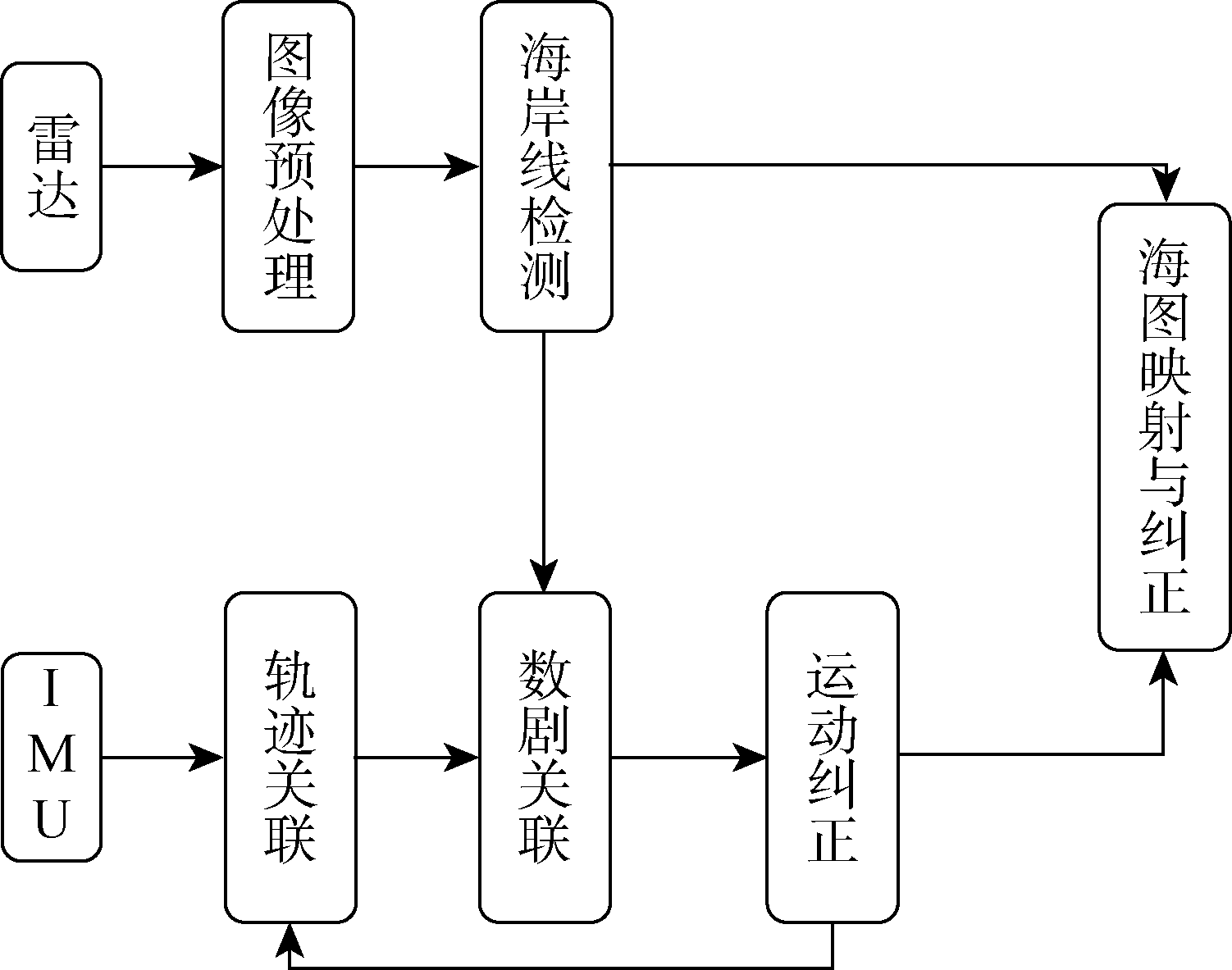
图9 结合AIS与雷达的环境感知
Fig.9 Flowchart of environmental perception combining AIS and radar

图10 遮挡情况下的雷达与AIS[43]
Fig.10 Radar and AIS under occlusion conditions[43]
| [1] |
张韩西子, 倪海参, 石正坤, 等. 水面无人艇发展趋势及关键技术展望[J]. 舰船科学技术, 2024, 46(8):108-111.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
鲍凌志, 杜家辉, 胡辛明, 等. 无人艇集群控制技术研究综述[J]. 自然杂志, 2023, 45(3):207-216.
|
|
|
|
| [8] |
孙文祺, 王文龙, 姜兆祯, 等. 海洋观测无人艇发展现状与展望[J]. 中国造船, 2022, 63(5):256-271.
|
|
|
|
| [9] |
|
| [10] |
孔凡涛. 基于激光雷达与相机信息融合的无人艇环境感知[D]. 大连: 大连海事大学, 2023.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [1] | 赵志欣, 曹玉龙, 陈远帅, 周辉林, 王玉皞. 面向外辐射源雷达目标探测的非时变稀疏模型和深度展开网络实现方法[J]. 兵工学报, 2024, 45(8): 2806-2816. |
| [2] | 陈齐乐, 钱鹏飞, 孔志杰, 乔彩霞, 张睿恒. 基于变分信号分解的脉冲多普勒雷达抗扫频式干扰方法[J]. 兵工学报, 2024, 45(6): 2076-2084. |
| [3] | 焦晓龙, 徐豫新, 吴宗娅, 周彤. 活性壳体温压战斗部对相控阵雷达天线的毁伤效应[J]. 兵工学报, 2024, 45(6): 1725-1734. |
| [4] | 李正杰, 陈红印, 谢军伟, 张浩为, 刘斌. 一种防空服务质量模型下的集中式多输入多输出雷达三维机动跟踪功率分配方法[J]. 兵工学报, 2024, 45(4): 1321-1331. |
| [5] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [6] | 张亮, 杜庆磊, 张昭建, 王永良. 一种慢时间维的密集假目标干扰主瓣匿影算法[J]. 兵工学报, 2024, 45(2): 606-617. |
| [7] | 刘增力, 张文, 曹奇宏, 赵宣植, 刘康, 曾赛. 面向三维目标跟踪的状态转换卡尔曼滤波方法[J]. 兵工学报, 2024, 45(11): 3998-4010. |
| [8] | 周宏根, 任小蝶, 孙丽, 李国超, 文思钊, 彭展, 刘寅飞. JUST回转支承故障试验数据分析[J]. 兵工学报, 2024, 45(10): 3744-3753. |
| [9] | 柳斌, 李雪梅. 一种基于激光雷达点云的自适应双半径滤波算法[J]. 兵工学报, 2023, 44(9): 2768-2777. |
| [10] | 郑泽新, 李伟, 邹鲲, 李艳福. 基于强化学习的对空雷达抗干扰波形设计[J]. 兵工学报, 2023, 44(5): 1422-1430. |
| [11] | 霍健, 陈慧敏, 马云飞, 郭鹏宇, 杨旭, 孟祥盛. 基于MEMS激光雷达的车辆目标识别算法[J]. 兵工学报, 2023, 44(4): 940-948. |
| [12] | 孔亚盟, 王国玉, 冯德军, 王俊杰. 相位调制表面周期非均匀间歇调制方法[J]. 兵工学报, 2023, 44(4): 1209-1216. |
| [13] | 韦文斌, 彭锐晖, 孙殿星, 张家林, 王向伟. 基于频响特性的大起伏密集假目标干扰识别技术[J]. 兵工学报, 2023, 44(10): 3204-3217. |
| [14] | 李海鹏, 冯大政, 陈少锋. 异构多基地雷达直线栅栏覆盖的布站优化方法[J]. 兵工学报, 2022, 43(8): 1858-1867. |
| [15] | 徐熙毅, 谭鸽伟, 李彪. 基于空变分离的两步聚焦双基曲线合成孔径雷达成像[J]. 兵工学报, 2022, 43(6): 1365-1375. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4