
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (8): 2678-2687.doi: 10.12382/bgxb.2023.0599
周国华, 李林锋*( ), 吴轲娜, 刘月林, 夏帅
), 吴轲娜, 刘月林, 夏帅
收稿日期:2023-06-21
上线日期:2023-10-23
通讯作者:
ZHOU Guohua, LI Linfeng*(), WU Kena, LIU Yuelin, XIA Shuai
Received:2023-06-21
Online:2023-10-23
摘要:
采用自主水下航行器(Autonomous Underwater Vehicle, AUV)磁测平台可开展海洋地磁场测量、水下磁性目标探测和识别等工作,AUV磁测平台具有广阔的应用前景,但目前AUV载体磁干扰补偿技术研究尚不成熟,制约着水下航行器测磁精度。基于磁测平台抗磁干扰基本原理,提出一种基于线性种群规模缩减和成功历史的参数自适应差分进化(Success History-based Adaptive Differential Evolution with Linear Population Size Reduction, L-SHADE)算法的AUV载体磁干扰参数辨识的数值模拟方法。用磁偶极子和旋转椭球壳混合模型来等效模拟AUV载体磁干扰,通过模拟航行获得多组磁测数据,据此建立磁干扰参数辨识模型,并采用L-SHADE算法求解。通过数值模拟实验定量分析研究磁测平台测磁精度随磁传感器、平台姿态及航向等误差的传播规律。研究结果表明:当磁传感器测量精度为10nT、姿态测量精度为0.01°、航向测量精度为0.1°时,测磁误差可小于100nT。设计的AUV磁测平台抗干扰试验表明,地磁场总量最大相对误差为1.07%。
中图分类号:
周国华, 李林锋, 吴轲娜, 刘月林, 夏帅. 基于L-SHADE算法的AUV载体磁干扰参数辨识的数值模拟[J]. 兵工学报, 2024, 45(8): 2678-2687.
ZHOU Guohua, LI Linfeng, WU Kena, LIU Yuelin, XIA Shuai. Numerical Simulation of Magnetic Interference Parameter Identification of AUV Based on L-SHADE Agorithm[J]. Acta Armamentarii, 2024, 45(8): 2678-2687.
图1 数学模型示意图
Fig.1 Schematic diagram of mathematical model
图2 姿态变换示意图
Fig.2 Schematic diagram of attitude transformation
图3 混合模型示意图
Fig.3 Schematic diagram of hybrid model
图4 线性种群规模递减的机制方案
Fig.4 Mechanism scheme of linear parameter declination

图5 模型示意图
Fig.5 Schematic diagram of model
| 辨识方法 | K | mp |
|---|---|---|
| 理论计算 | ||
| 模拟仿真 |
表1 参数辨识对比表
Table 1 Parameter identification comparison sheet
| 辨识方法 | K | mp |
|---|---|---|
| 理论计算 | ||
| 模拟仿真 |

图6 磁传感器测量精度影响分析
Fig.6 Analysis of influence of magnetic sensor measuring accuracy
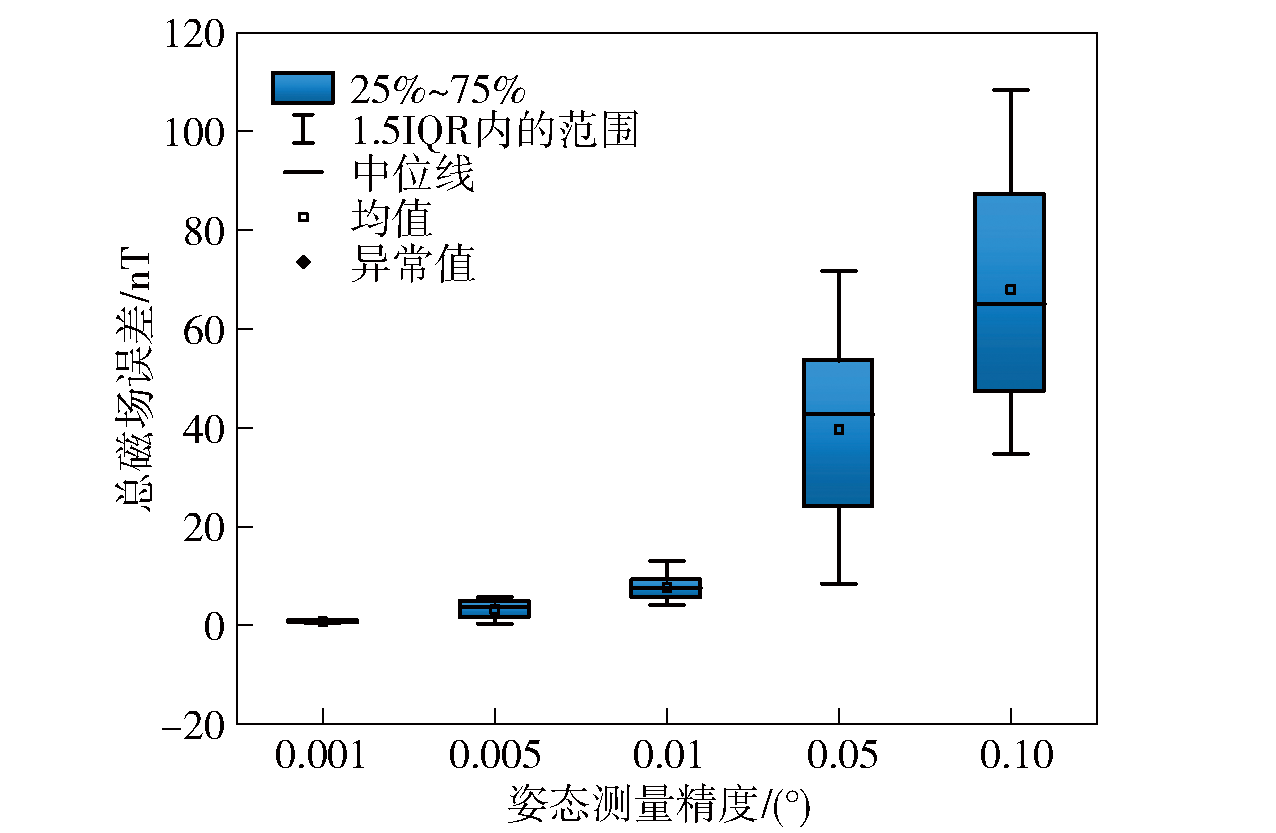
图7 姿态测量精度影响分析
Fig.7 Analysis of influence of attitude measurement accuracy
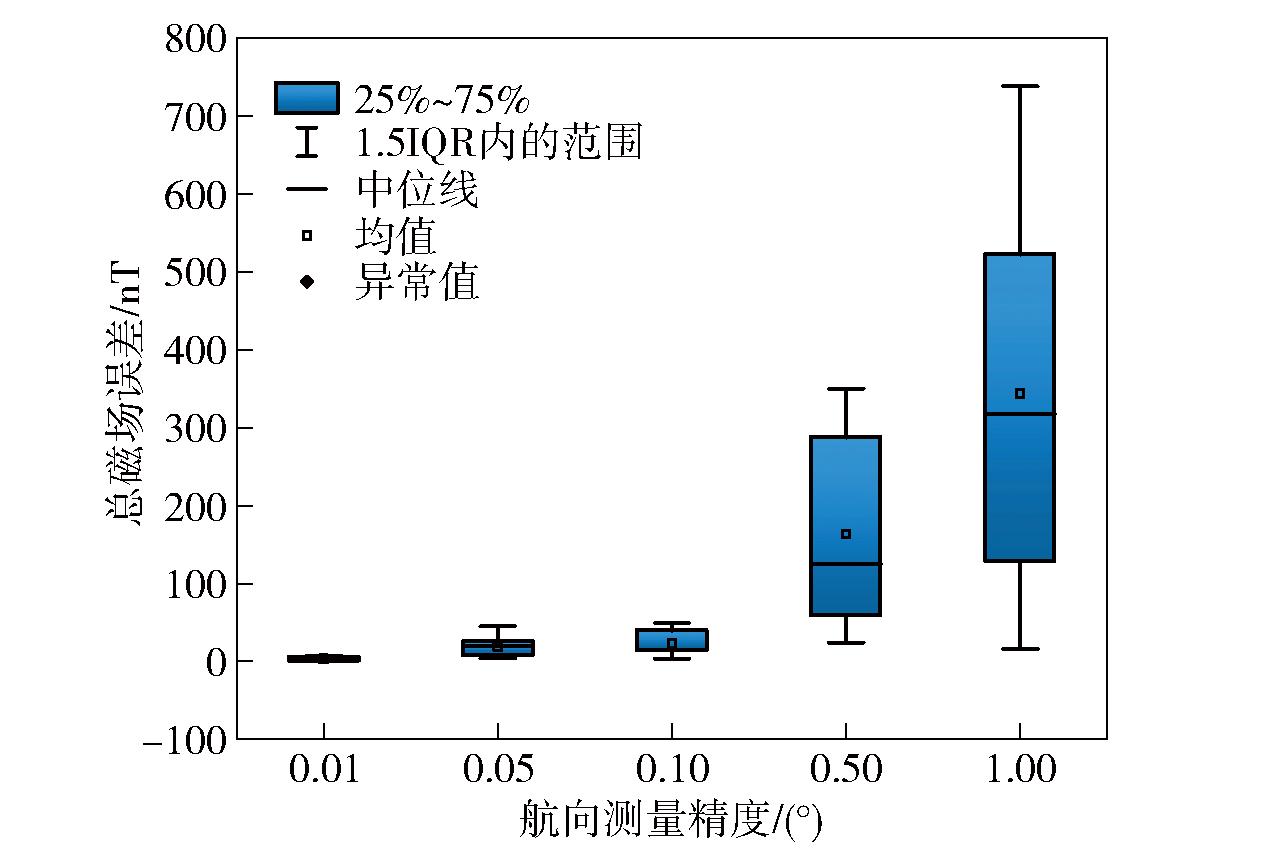
图8 航向测量精度影响分析
Fig.8 Analysis of influence of heading measurement accuracy
| 序号 | 磁传感器测量 精度/nT | 姿态测量 精度/(°) | 航向测量 精度/(°) |
|---|---|---|---|
| 1 | 100 | 0.1 | 1 |
| 2 | 1 | 0.001 | 1 |
| 3 | 100 | 0.1 | 0.5 |
| 4 | 10 | 0.1 | 0.5 |
| 5 | 1 | 0.1 | 0.5 |
| 6 | 10 | 0.05 | 0.5 |
| 7 | 10 | 0.1 | 0.1 |
| 8 | 10 | 0.05 | 0.1 |
| 9 | 1 | 0.05 | 0.1 |
| 10 | 10 | 0.01 | 0.1 |
| 11 | 1 | 0.01 | 0.1 |
| 12 | 0.1 | 0.005 | 0.05 |
| 13 | 0.01 | 0.001 | 0.01 |
表2 13组典型传感器精度方案
Table 2 13 groups of typical sensor accuracy solutions
| 序号 | 磁传感器测量 精度/nT | 姿态测量 精度/(°) | 航向测量 精度/(°) |
|---|---|---|---|
| 1 | 100 | 0.1 | 1 |
| 2 | 1 | 0.001 | 1 |
| 3 | 100 | 0.1 | 0.5 |
| 4 | 10 | 0.1 | 0.5 |
| 5 | 1 | 0.1 | 0.5 |
| 6 | 10 | 0.05 | 0.5 |
| 7 | 10 | 0.1 | 0.1 |
| 8 | 10 | 0.05 | 0.1 |
| 9 | 1 | 0.05 | 0.1 |
| 10 | 10 | 0.01 | 0.1 |
| 11 | 1 | 0.01 | 0.1 |
| 12 | 0.1 | 0.005 | 0.05 |
| 13 | 0.01 | 0.001 | 0.01 |
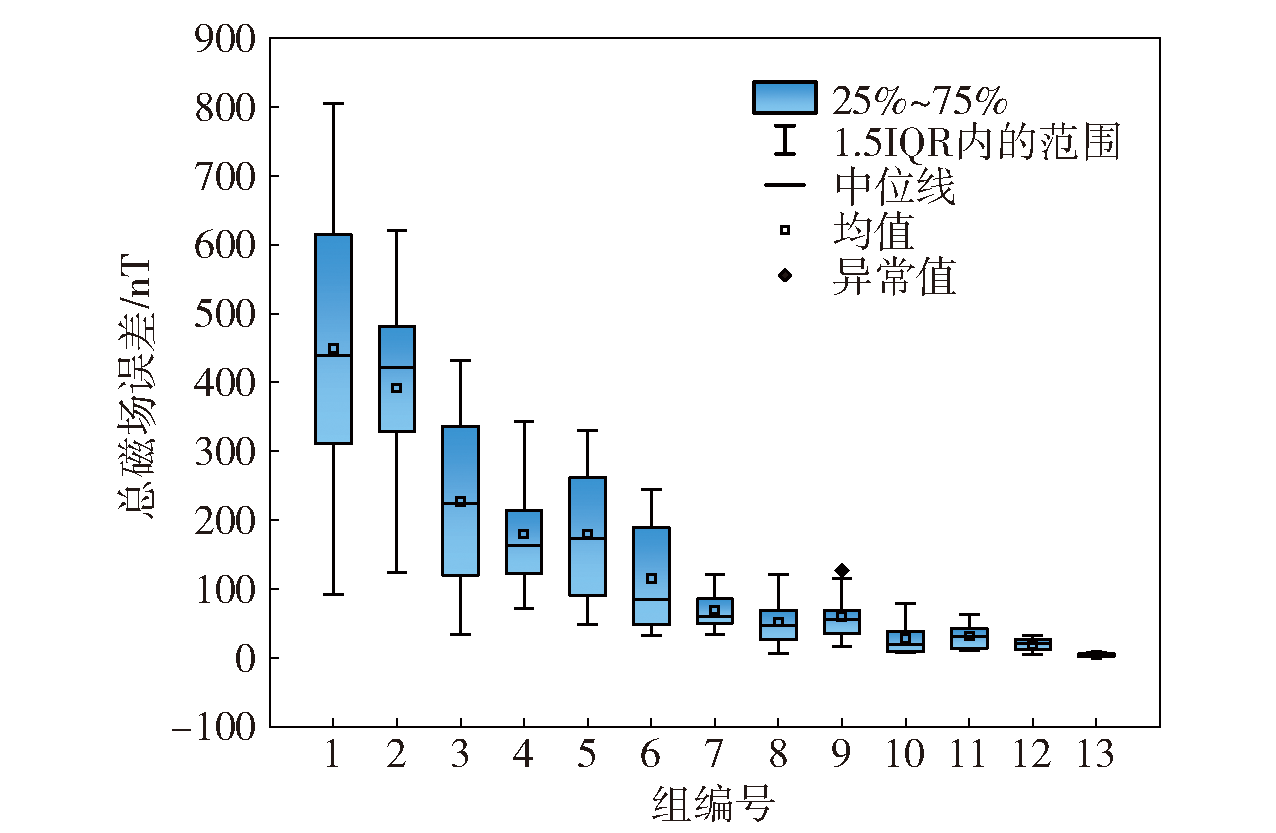
图9 不同精度传感器影响效果分析
Fig.9 Effect analysis of sensors with different precision

图10 实验场地布置图
Fig.10 Layout of the experimental site
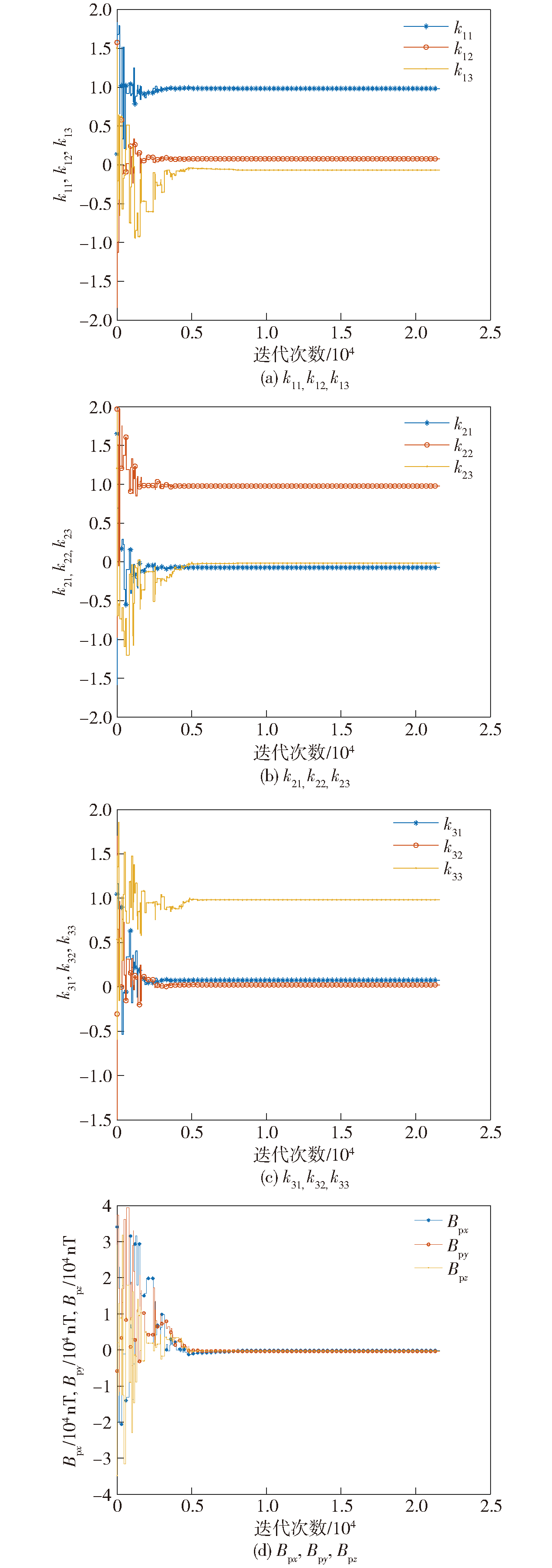
图11 磁干扰参数的收敛曲线
Fig.11 Convergence curve of magnetic interference parameters
| 序号 | Bpx/ nT | Bpy/ nT | Bpz/ nT | 航向角 φ/rad | 横摇角 γ/rad | 纵倾角 θ/rad |
|---|---|---|---|---|---|---|
| 1 | 33253 | 8000 | 35755 | 0 | 0.26062 | 0.03970 |
| 2 | 33314 | -1608 | 36591 | 0 | 0.00181 | 0.04947 |
| 3 | 33237 | -11381 | 34913 | 0 | -0.26326 | 0.05988 |
| 4 | -1335 | -24701 | 42688 | 1.5708 | 0.26191 | 0.04052 |
| 5 | -1535 | -34938 | 34928 | 1.5708 | -0.0007 | 0.05033 |
| 6 | -1770 | -42911 | 24653 | 1.5708 | -0.26270 | 0.06079 |
| 7 | -34999 | 8045 | 33542 | 3.14159 | 0.26182 | 0.04119 |
| 8 | -34957 | -827 | 34681 | 3.14159 | -0.00051 | 0.05000 |
| 9 | -34999 | -9717 | 33434 | 3.14159 | -0.26287 | 0.06148 |
| 10 | -143 | 41096 | 26644 | 4.71239 | 0.26088 | 0.04040 |
| 11 | 120 | 32745 | 36472 | 4.71239 | -0.00120 | 0.04985 |
| 12 | 264 | 22196 | 43788 | 4.71239 | -0.26117 | 0.06044 |
表3 AUV载体磁场测量数据表
Table 3 AUV magnetic field measurement data sheet
| 序号 | Bpx/ nT | Bpy/ nT | Bpz/ nT | 航向角 φ/rad | 横摇角 γ/rad | 纵倾角 θ/rad |
|---|---|---|---|---|---|---|
| 1 | 33253 | 8000 | 35755 | 0 | 0.26062 | 0.03970 |
| 2 | 33314 | -1608 | 36591 | 0 | 0.00181 | 0.04947 |
| 3 | 33237 | -11381 | 34913 | 0 | -0.26326 | 0.05988 |
| 4 | -1335 | -24701 | 42688 | 1.5708 | 0.26191 | 0.04052 |
| 5 | -1535 | -34938 | 34928 | 1.5708 | -0.0007 | 0.05033 |
| 6 | -1770 | -42911 | 24653 | 1.5708 | -0.26270 | 0.06079 |
| 7 | -34999 | 8045 | 33542 | 3.14159 | 0.26182 | 0.04119 |
| 8 | -34957 | -827 | 34681 | 3.14159 | -0.00051 | 0.05000 |
| 9 | -34999 | -9717 | 33434 | 3.14159 | -0.26287 | 0.06148 |
| 10 | -143 | 41096 | 26644 | 4.71239 | 0.26088 | 0.04040 |
| 11 | 120 | 32745 | 36472 | 4.71239 | -0.00120 | 0.04985 |
| 12 | 264 | 22196 | 43788 | 4.71239 | -0.26117 | 0.06044 |
| 算法 | ΔBx/nT | ΔBy/nT | ΔBz/nT | ΔB/nT |
|---|---|---|---|---|
| OLS | 11.8 | 9.3 | 6.1 | 9.3 |
| L-SHADE | 6.0 | 12.7 | 5.8 | 7.8 |
表4 标准差对比表
Table 4 Standard deviation sheet
| 算法 | ΔBx/nT | ΔBy/nT | ΔBz/nT | ΔB/nT |
|---|---|---|---|---|
| OLS | 11.8 | 9.3 | 6.1 | 9.3 |
| L-SHADE | 6.0 | 12.7 | 5.8 | 7.8 |
| [1] |
郭成豹, 胡松, 王文井, 等. 利用磁传感器阵列磁场差值的舰船磁场反演建模方法[J]. 兵工学报, 2022, 43(1): 111-119.
doi: 10.3969/j.issn.1000-1093.2022.01.012 |
|
doi: 10.3969/j.issn.1000-1093.2022.01.012 |
|
| [2] |
王锴松, 周国华, 刘月林, 等. 地磁模拟法测量舰船感应磁场的数值模拟[J]. 兵工学报, 2022, 43(3): 617-625.
doi: 10.12382/bgxb.2021.0110 |
|
doi: 10.12382/bgxb.2021.0110 |
|
| [3] |
周耀忠, 张国友. 舰船磁场分析计算[M]. 北京: 国防工业出版社, 2004.
|
|
|
|
| [4] |
黄琰, 李岩, 俞建成, 等. AUV智能化现状与发展趋势[J]. 机器人, 2020, 42(2): 215-231.
doi: 10.13973/j.cnki.robot.190392 |
|
doi: 10.13973/j.cnki.robot.190392 |
|
| [5] |
王童豪, 彭星光, 潘光, 等. 无人水下航行器的发展现状与关键技术[J]. 宇航总体技术, 2017, 1(4): 52-64.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
刘雪君. 基于水下机器人的磁干扰补偿算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2018.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
曹军宏, 刘飞. 基于ROV的舰船磁场测量方法[J]. 水下无人系统学报, 2021, 29(6): 754-759.
|
|
|
|
| [29] |
陈进明, 隗燕琳. 基于神经网络的磁性目标磁矩反演方法[J]. 船电技术, 2012, 32(9): 57-60.
|
|
|
|
| [30] |
王志锋, 刘大明. 基于差分进化的共面矩形线圈均匀磁场优化[J]. 船电技术, 2012, 32(12): 29-31, 34.
|
|
|
|
| [31] |
卞强, 刘大明, 童余德, 等. 基于差分进化算法的铁磁物体磁化率优化方法[J]. 海军工程大学学报, 2015, 27(3): 1-4, 52.
|
|
|
|
| [32] |
|
| [1] | 林瑜斌, 侯保林, 鲍丹, 赵伟. 基于隐式Lyapunov函数的弹药传输机械臂变增益超螺旋滑模控制[J]. 兵工学报, 2024, 45(8): 2573-2583. |
| [2] | 赵伟, 侯保林, 闫少军, 鲍丹, 林瑜斌. 链式回转弹仓区间不确定性动力学模型[J]. 兵工学报, 2024, 45(6): 1991-2002. |
| [3] | 文浩, 侯保林, 林瑜斌, 金鑫. 曲线链式回转弹仓动力学模型不确定参数辨识[J]. 兵工学报, 2024, 45(5): 1460-1471. |
| [4] | 丁文俊, 张国宗, 刘海旻, 柴亚军, 王驰宇, 毛昭勇. 面向海流扰动和通信时延的欠驱动AUV编队跟踪控制[J]. 兵工学报, 2024, 45(1): 184-196. |
| [5] | 朱其新, 姜晨艳, 张国平, 朱永红. 基于三角函数正交性的永磁伺服系统机械参数辨识[J]. 兵工学报, 2023, 44(6): 1820-1828. |
| [6] | 张家闻, 房浩霖, 李家旺. 基于复杂约束条件的欠驱动AUV三维路径规划[J]. 兵工学报, 2022, 43(6): 1407-1414. |
| [7] | 刘忠永, 国敬, 范涛, 边元均, 孟柳, 章回炫, 温旭辉. 高性能永磁同步发电机无位置传感器控制策略[J]. 兵工学报, 2022, 43(11): 2761-2762. |
| [8] | 孟柳, 章回炫, 范涛. 永磁同步电机静止参数辨识及电流环控制器自动参数整定[J]. 兵工学报, 2021, 42(10): 2114-2122. |
| [9] | 林通, 钱林方, 付佳维, 王明明. 火炮高平机参数辨识与灵敏度[J]. 兵工学报, 2020, 41(9): 1736-1744. |
| [10] | 刘洋, 常思江, 魏伟. 多发弹气动参数联合辨识方法研究[J]. 兵工学报, 2020, 41(5): 890-901. |
| [11] | 邸青, 周竞烨, 方凯, 姚佳琪, 李家旺. 基于模型参数不确定的欠驱动非对称自主水下航行器全局镇定控制研究[J]. 兵工学报, 2020, 41(5): 950-957. |
| [12] | 盛亮, 邱志明, 于邵祯, 焦俊杰. 自主水下航行器多终点航路规划的距离正则化混合水平集算法研究[J]. 兵工学报, 2020, 41(4): 750-762. |
| [13] | 余磊, 张永励, 袁梦笛, 刘瑞卿. 基于泛函序列时变自回归滑动平均模型的弹箭时变模态参数递推估计方法[J]. 兵工学报, 2020, 41(11): 2189-2197. |
| [14] | 褚式新, 茅云生, 董早鹏, 杨鑫. 基于极大似然法的高速无人艇操纵响应模型参数辨识[J]. 兵工学报, 2020, 41(1): 127-134. |
| [15] | 王金强, 王聪, 魏英杰, 张成举. 未知海流干扰下自主水下航行器位置跟踪控制策略研究[J]. 兵工学报, 2019, 40(3): 583-591. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4