
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (2): 380-393.doi: 10.12382/bgxb.2021.0588
宋慧新1,2, 顾亮1,*( ), 张进秋3, 董明明1, 王利明4
), 张进秋3, 董明明1, 王利明4
收稿日期:2021-08-31
上线日期:2022-06-11
通讯作者:
SONG Huixin1,2, GU Liang1,*(), ZHANG Jinqiu3, DONG Mingming1, WANG Liming4
Received:2021-08-31
Online:2022-06-11
摘要:
为解决高速履带车辆机电悬架在高频区性能恶化与结构可靠性的问题,分析基于扭杆的机电悬架刚度特性,求解悬架杆系复杂运动关系,计算机电执行器的等效惯性质量,建立考虑惯性质量与负重轮阻尼的2自由度机电悬架模型。量化分析惯性质量对悬架性能的不利影响,得到影响悬架平顺性、部件可靠性的惯性力的频域分布区间与功率谱密度分布区间。根据悬架惯性力的频域分布,以及悬架动挠度的幅频特性,提出滤振与缓冲的措施,建立带有滤振缓冲器的悬架模型。仿真和试验结果表明:滤振缓冲能够有效降低惯性质量影响,在D级路面40km/h行驶工况下,将原惯性力的均方根值由原2143N降低至175N。同时簧载质量加速度均方根值,由原3.5108m/s2降低至1.2682m/s2。台架测试证明齿圈应力在采用滤振缓冲措施后得到较大衰减,最大值由519.9MPa降低为110.1MPa。通过仿真和试验,验证了滤振与缓冲的措施能够提升机电悬架的性能,有助于解决惯性质量带来的高频区性能恶化的问题。
中图分类号:
宋慧新, 顾亮, 张进秋, 董明明, 王利明. 高速履带车辆机电悬架惯量分析与滤振缓冲设计[J]. 兵工学报, 2023, 44(2): 380-393.
SONG Huixin, GU Liang, ZHANG Jinqiu, DONG Mingming, WANG Liming. Inertia Analysis and Vibration Filtering Buffer Design of Electromechanical Suspension of High Speed Tracked Vehicle[J]. Acta Armamentarii, 2023, 44(2): 380-393.

图1 机电悬架能量耗散或回收原理
Fig.1 Energy dissipation or recovery principle of electromechanical suspension
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| 非簧载质量mu/kg | 235 |
| 单元履带质量ml/kg | 170 |
| 扭杆材料剪切弹性模量G/MPa | 78300 |
| 扭杆工作长度l/mm | 1940 |
| 扭杆工作直径dT/mm | 48 |
| 平衡肘初始安装角α0/(°) | -43.56 |
| 负重轮垂向刚度kf/(N·m) | 2160 |
| 履带垂向刚度kl/(N·m) | 40000 |
| 车辆底甲板距地高度h/mm | 406.5 |
| 扭杆中心距车底甲板高度h0/mm | 95 |
| 履带板厚度hb/mm | 80 |
| 平衡肘旋转半径Rd/mm | 360 |
| 负重轮直径Df/mm | 600 |
| 悬架静行程fj/mm | 135 |
| 悬架动行程fd/mm | 293 |
表1 悬架参数
Table 1 Suspension parameters
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| 非簧载质量mu/kg | 235 |
| 单元履带质量ml/kg | 170 |
| 扭杆材料剪切弹性模量G/MPa | 78300 |
| 扭杆工作长度l/mm | 1940 |
| 扭杆工作直径dT/mm | 48 |
| 平衡肘初始安装角α0/(°) | -43.56 |
| 负重轮垂向刚度kf/(N·m) | 2160 |
| 履带垂向刚度kl/(N·m) | 40000 |
| 车辆底甲板距地高度h/mm | 406.5 |
| 扭杆中心距车底甲板高度h0/mm | 95 |
| 履带板厚度hb/mm | 80 |
| 平衡肘旋转半径Rd/mm | 360 |
| 负重轮直径Df/mm | 600 |
| 悬架静行程fj/mm | 135 |
| 悬架动行程fd/mm | 293 |

图2 单轮机电悬架总成与运动关系
Fig.2 Single wheel's electromechanical suspension assembly and motion relationship

图3 悬架变形量与悬架刚度、簧载质量固有频率关系
Fig.3 Relationship between suspension deformation and suspension stiffness/sprung mass natural frequency

图4 机电悬架系统杆系运动关系分析图
Fig.4 Analysis of linkage motion relationship for the electromechanical suspension system
| 参数 | 数值 |
|---|---|
| 平衡肘与摇臂旋转点水平间距AF/mm | 566 |
| 平衡肘与摇臂旋转点垂直间距DF/mm | 70 |
| 摇臂旋转半径CD/mm | 260 |
| 连杆长度CE/mm | 240 |
| 平衡肘旋转点至连杆安装点长度AE/mm | 300 |
| 平衡肘与负重轮旋转点至连杆安装点长度BE/mm | 60 |
表2 悬架杆系参数
Table 2 Suspension linkage parameters
| 参数 | 数值 |
|---|---|
| 平衡肘与摇臂旋转点水平间距AF/mm | 566 |
| 平衡肘与摇臂旋转点垂直间距DF/mm | 70 |
| 摇臂旋转半径CD/mm | 260 |
| 连杆长度CE/mm | 240 |
| 平衡肘旋转点至连杆安装点长度AE/mm | 300 |
| 平衡肘与负重轮旋转点至连杆安装点长度BE/mm | 60 |

图5 悬架变形量与摇臂旋转角度对应关系与拟合直线
Fig.5 Relationship between suspension deformation and rocker arm rotation angle as well as the fitted straight line

图6 执行器内部结构原理
Fig.6 Internal structure principle of actuator
| 参数 | 数值 |
|---|---|
| Jr/(kg·m2) | 0.32019 |
| Jx/(kg·m2) | 0.05316 |
| Jd/(kg·m2) | 0.02335 |
| ir | 1 |
| ix | 9.4 |
| id | 5.2 |
| 摇臂的旋转半径Ry/mm | 260 |
表3 机电执行器参数
Table 3 Parameters of electromechanical actuator
| 参数 | 数值 |
|---|---|
| Jr/(kg·m2) | 0.32019 |
| Jx/(kg·m2) | 0.05316 |
| Jd/(kg·m2) | 0.02335 |
| ir | 1 |
| ix | 9.4 |
| id | 5.2 |
| 摇臂的旋转半径Ry/mm | 260 |

图7 2自由度机电悬架模型
Fig.7 Two-degree-of-freedom (2DOF) electromechanical suspension model
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| ml/kg | 235 |
| mr/kg | 526 |
| ks/(N·mm-1) | 154 |
| cs/(N·s·m-1) | 9612 |
| ku/mm | 1940 |
| cu/(N·s·m-1) | 800 |
| μ | 0.098 |
| β | 2.1 |
| γ | 13.3 |
| ξ | 0.25 |
| ε | 0.083 |
| fs0/Hz | 1.27 |
| fs/Hz | 1.15 |
| fu0/Hz | 15.41 |
| fu/Hz | 8.57 |
表4 2自由度悬架模型参数
Table 4 Parameters of 2DOF electromechanical actuator
| 参数 | 数值 |
|---|---|
| ms/kg | 2400 |
| ml/kg | 235 |
| mr/kg | 526 |
| ks/(N·mm-1) | 154 |
| cs/(N·s·m-1) | 9612 |
| ku/mm | 1940 |
| cu/(N·s·m-1) | 800 |
| μ | 0.098 |
| β | 2.1 |
| γ | 13.3 |
| ξ | 0.25 |
| ε | 0.083 |
| fs0/Hz | 1.27 |
| fs/Hz | 1.15 |
| fu0/Hz | 15.41 |
| fu/Hz | 8.57 |

图8 惯性力与簧载质量加速度随车速的变化
Fig.8 Variations of inertia force and sprung mass acceleration with vehicle speed
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 惯性质量为0kg | 0 | 2.15 | 0.4212 | 17.47 |
| 惯性质量为526kg | 2216 | 5.17 | 0.5561 | 17.31 |
表5 频域内D级路面车速40km/h时悬架特性对比
Table 5 Comparison of suspension characteristics at 40km/h on class F road in the frequency domain
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 惯性质量为0kg | 0 | 2.15 | 0.4212 | 17.47 |
| 惯性质量为526kg | 2216 | 5.17 | 0.5561 | 17.31 |

图9 不同惯性质量时簧载质量加速度的功率谱密度
Fig.9 Power spectral density of sprung mass acceleration with different inertial masses

图10 D级路面车速40km/h时惯性力
Fig.10 Inertia force at 40km/h on Class D road

图11 惯性质量为526kg时惯性力的功率谱密度
Fig.11 Power spectral density of inertial force under the inertial mass of 526kg

图12 滤振起始频率与滤振区域的图示
Fig.12 Diagram of the initial frequency of vibration filtering and the vibration filtering region

图13 滤振起始频率随簧载质量变化关系
Fig.13 Variation of the initial frequency of vibration filtering with sprung mass
| 内容 | 路面等级 | |||||
|---|---|---|---|---|---|---|
| A | B | C | D | E | F | |
| 动挠度均方根值/mm | 1.9 | 3.8 | 7.0 | 7.0 | 6.9 | 5.6 |
| 行驶速度不小于/(km·h) | 120 | 120 | 100 | 26 | 7 | 2 |
表6 滤振幅值7mm以下对应的不同路面行驶速度
Table 6 Different speeds on road corresponding to the amplitude value less than 7mm
| 内容 | 路面等级 | |||||
|---|---|---|---|---|---|---|
| A | B | C | D | E | F | |
| 动挠度均方根值/mm | 1.9 | 3.8 | 7.0 | 7.0 | 6.9 | 5.6 |
| 行驶速度不小于/(km·h) | 120 | 120 | 100 | 26 | 7 | 2 |
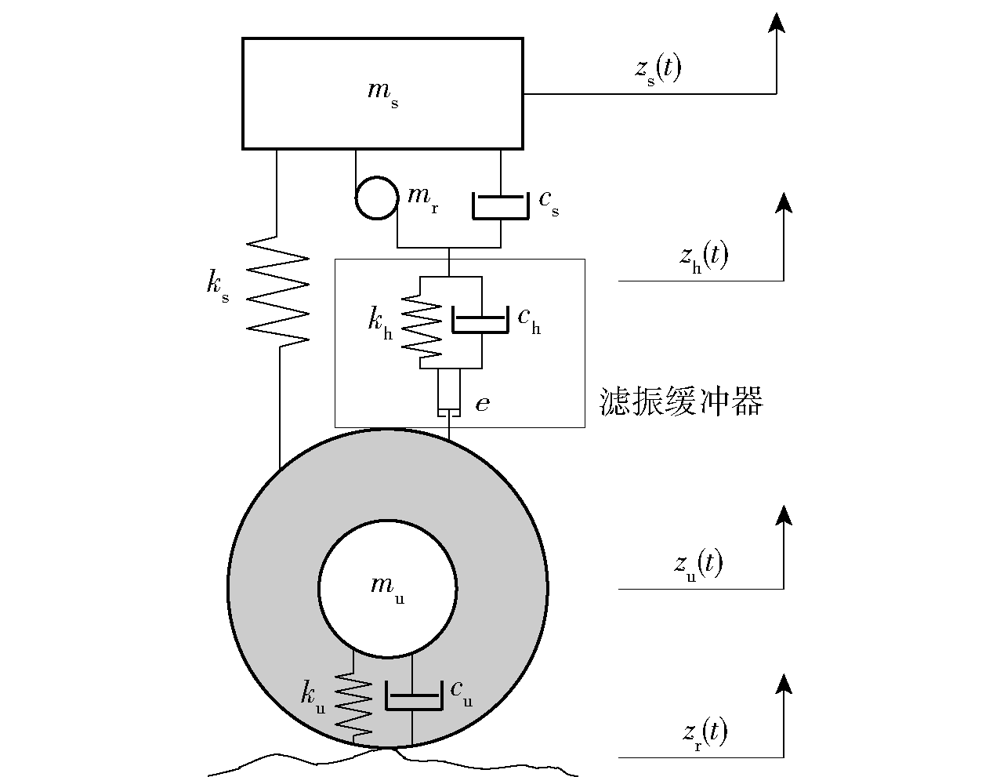
图14 增加滤振缓冲器的2自由度悬架模型图
Fig.14 Diagram of 2DOF suspension model with vibration filtering buffer

图15 滤振缓冲器结构
Fig.15 Vibration filtering buffer structure
| 参数 | 数值 |
|---|---|
| 电机的感应电动势常数ke/(V·s·rad-1) | 0.6 |
| 电机的扭矩常数ki/(N·m·A-1) | 10 |
| 电机负载电阻R/Ω | 100 |
| 电机内阻r/Ω | 1.3 |
| 缓冲器刚度khs/(N·m·rad-1) | 259 |
| 缓冲器阻尼系数chs/(N·m·s·rad-1) | 0.01 |
| 缓冲器转动惯量Jh/(kg·m2) | 0.005 |
表7 电机与缓冲器参数表
Table 7 Motor and buffer parameters
| 参数 | 数值 |
|---|---|
| 电机的感应电动势常数ke/(V·s·rad-1) | 0.6 |
| 电机的扭矩常数ki/(N·m·A-1) | 10 |
| 电机负载电阻R/Ω | 100 |
| 电机内阻r/Ω | 1.3 |
| 缓冲器刚度khs/(N·m·rad-1) | 259 |
| 缓冲器阻尼系数chs/(N·m·s·rad-1) | 0.01 |
| 缓冲器转动惯量Jh/(kg·m2) | 0.005 |
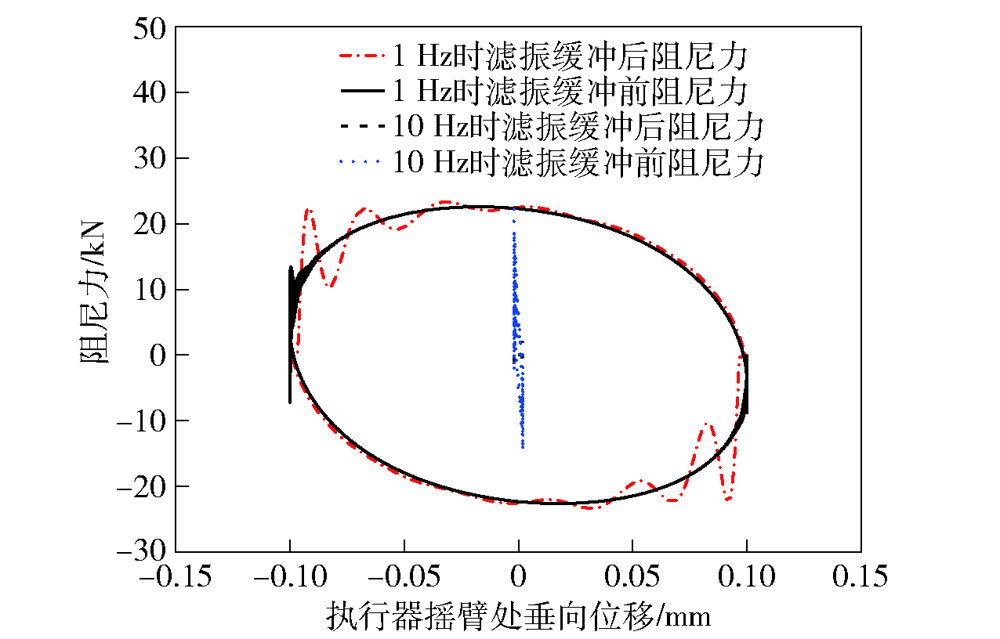
图16 执行器力-位移特性
Fig.16 Actuator force-displacement characteristics

图17 执行器力-速度特性
Fig.17 Actuator force-speed characteristics

图18 各频率阻尼力标准差均值与缓冲器刚度关系
Fig.18 Relationship between mean value of standard deviation of damping force at each frequency and buffer stiffness
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 无惯性质量 | 0 | 0.8609 | 0.3076 | 31.70 |
| 惯性质量为526kg | 2143 | 3.5108 | 0.5568 | 32.20 |
| 惯性质量为526kg (带滤振缓冲器) | 175 | 1.2682 | 0.4104 | 34.03 |
表8 D级路面40km/h时3种状态的悬架特性对比
Table 8 Comparison of suspension characteristics for the three states at 40km/h on Class D road
| 悬架状态 | 均方根值 | |||
|---|---|---|---|---|
| /N | /(m·s-2) | /mm | ||
| 无惯性质量 | 0 | 0.8609 | 0.3076 | 31.70 |
| 惯性质量为526kg | 2143 | 3.5108 | 0.5568 | 32.20 |
| 惯性质量为526kg (带滤振缓冲器) | 175 | 1.2682 | 0.4104 | 34.03 |

图19 有无滤振缓冲惯性力的功率谱密度对比
Fig.19 Comparison of power spectral density of inertial force with or without vibration filtering and buffering measures

图20 机电悬架的台架试验
Fig.20 Bench test of electromechanical suspension

图21 内齿圈的测点分布
Fig.21 Measuring point distribution of inner gear ring

图22 有无滤振缓冲措施的内齿圈应力对比
Fig.22 Stress comparison of inner gear ring with or without vibration filtering and buffering measures
| 悬架状态 | 簧载质量振动加速度均方根值/(m·s-2) | |||
|---|---|---|---|---|
| 频率3Hz, 振幅30mm | 频率7Hz, 振幅8mm | 频率10Hz, 振幅5mm | 频率15Hz, 振幅3mm | |
| 无滤振缓冲 | 1.8609 | 8.1693 | 12.4382 | 16.3824 |
| 有滤振缓冲 | 0.3881 | 0.6153 | 0.3998 | 1.0373 |
| 降低百分比/% | 79.14 | 92.47 | 96.79 | 93.67 |
表9 多频点台架试验悬架特性对比
Table 9 Comparison of suspension characteristics in multi-frequency bench test
| 悬架状态 | 簧载质量振动加速度均方根值/(m·s-2) | |||
|---|---|---|---|---|
| 频率3Hz, 振幅30mm | 频率7Hz, 振幅8mm | 频率10Hz, 振幅5mm | 频率15Hz, 振幅3mm | |
| 无滤振缓冲 | 1.8609 | 8.1693 | 12.4382 | 16.3824 |
| 有滤振缓冲 | 0.3881 | 0.6153 | 0.3998 | 1.0373 |
| 降低百分比/% | 79.14 | 92.47 | 96.79 | 93.67 |

图23 有无滤振缓冲器的簧载质量加速度对比
Fig.23 Comparison of sprung mass acceleration with and without vibration filtering buffer
| 悬架状态 | 均方根值 | ||
|---|---|---|---|
| /(m·s-2) | /mm | ||
| 无滤振缓冲 | 5.8215 | 0.8324 | 35.43 |
| 有滤振缓冲 | 2.5243 | 0.7121 | 38.32 |
表10 D级路面台架试验悬架特性对比
Table 10 Comparison of suspension characteristics in bench test of Class D road
| 悬架状态 | 均方根值 | ||
|---|---|---|---|
| /(m·s-2) | /mm | ||
| 无滤振缓冲 | 5.8215 | 0.8324 | 35.43 |
| 有滤振缓冲 | 2.5243 | 0.7121 | 38.32 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
毛明, 张亚峰, 杜甫, 等. 高机动履带车辆行驶系统中的5个科学技术问题[J]. 兵工学报, 2015, 36(8):1546-1555.
doi: 10.3969/j.issn.1000-1093.2015.08.024 |
|
doi: 10.3969/j.issn.1000-1093.2015.08.024 |
|
| [6] |
doi: 10.1016/j.ymssp.2020.106988 URL |
| [7] |
寇发荣, 陈晨, 李阳康, 等. 电磁复合式馈能悬架半主动控制研究[J]. 中国科技论文, 2020, 15(2):167-173.
|
|
|
|
| [8] |
|
| [9] |
喻凡, 张勇超. 馈能型车辆主动悬架技术[J]. 农业机械学报, 2010, 41(1):1-6.
|
|
|
|
| [10] |
黄昆, 喻凡, 张勇超. 基于能量流动分析的电磁式馈能型主动悬架控制[J]. 上海交通大学学报, 2011, 45(7):1068-1073.
|
|
|
|
| [11] |
殷珺, 罗建南, 喻凡. 汽车电磁式主动悬架技术综述[J]. 机械设计与研究, 2020, 36(1):161-168.
|
|
|
|
| [12] |
曹民, 刘为, 喻凡. 车辆主动悬架用电机作动器的研制[J]. 机械工程学报, 2008, 44(11):224-228.
|
|
|
|
| [13] |
张进秋, 彭志召, 岳杰, 等. 车辆馈能悬挂技术综述[J]. 装甲兵工程学院学报, 2012, 26(5):1-7.
|
|
|
|
| [14] |
张进秋, 王兴野, 贾进峰, 等. 主动悬架有限频域H∞时滞控制参数影响分析及优化[J]. 兵工学报, 2018, 39(9):1850-1857.
doi: 10.3969/j.issn.1000-1093.2018.09.023 |
|
|
|
| [15] |
王兴野, 张进秋, 刘义乐, 等. 作动器惯性质量对主动悬架幅频特性的影响[J]. 汽车工程, 2018, 40(9):1083-1088.
|
|
|
|
| [16] |
彭虎, 张进秋, 张建, 等. 并联复合式电磁悬挂模型参考多模式切换控制研究[J]. 兵工学报, 2019, 40(1):19-28.
doi: 10.3969/j.issn.1000-1093.2019.01.003 |
|
doi: 10.3969/j.issn.1000-1093.2019.01.003 |
|
| [17] |
汪若尘, 谢健, 叶青, 等. 直线电机式主动悬架建模与试验研究[J]. 汽车工程, 2016, 38(4):495-499.
|
|
|
|
| [18] |
汪若尘, 钱禹辰, 丁仁凯, 等. 基于LQG的混合电磁悬架阻尼-刚度设计及试验研究[J]. 振动与冲击, 2018, 37(3):61-65.
|
|
|
|
| [19] |
王庆年, 刘松山, 王伟华, 等. 滚珠丝杠式馈能型减振器的结构设计及参数匹配[J]. 吉林大学学报(工学版), 2012, 42(5):1100-1106.
|
|
|
|
| [20] |
段国柱, 宋慧新, 陈宇, 等. 基于MATLAB 软件的机电悬挂连杆机构的运动学分析[J]. 机械工程师, 2020(2):103-104,109.
|
|
|
|
| [21] |
余志生, 夏群生. 汽车理论[M]. 北京: 机械工业出版社, 2019.
|
|
|
|
| [22] |
宋慧新, 李翠芬. 基于频率分析的半主动悬架模糊控制方法研究[J]. 汽车工程, 2008, 30(6):518-522.
|
|
|
|
| [23] |
doi: 10.1109/TVT.2012.2229308 URL |
| [1] | 陈升辉, 郭彦峰, 付云岗, 马小茭, 秦芳. 一种横截面为正五/六边形的四层复合材料管轴向冲击吸能研究[J]. 兵工学报, 2023, 44(3): 876-885. |
| [2] | 杨占华, 刘春生, 李军, 郭少鹏, 李建阳. 空降车辆着陆缓冲过程动态建模仿真[J]. 兵工学报, 2022, 43(S1): 26-34. |
| [3] | 权晓波, 包健, 孙龙泉, 王都亮. 基于耦合欧拉-拉格朗日算法的航行体缓冲头帽冲击性能[J]. 兵工学报, 2022, 43(4): 851-860. |
| [4] | 李子轩, 杨国来, 刘宁. 强冲击载荷下电磁缓冲器有限元仿真模型[J]. 兵工学报, 2021, 42(5): 913-923. |
| [5] | 张成, 柳朝阳, 顾克秋. 超轻型火炮后大架缓冲机理及特性优化[J]. 兵工学报, 2020, 41(9): 1752-1761. |
| [6] | 王之千, 毛保全, 朱锐, 白向华, 韩小平. 分数Maxwell黏弹性胶体阻尼缓冲器振荡流模型研究[J]. 兵工学报, 2020, 41(5): 984-995. |
| [7] | 王之千, 毛保全, 朱锐, 杨雨迎, 韩小平. 遥控武器站黏弹性胶体缓冲器试验研究[J]. 兵工学报, 2020, 41(2): 209-221. |
| [8] | 魏巍, 彭卉, 刘旭, 简洪超, 谢文浩, 闫清东, 朱浩月. 液力传动车辆闭锁充油动态缓冲特性优化[J]. 兵工学报, 2019, 40(7): 1358-1364. |
| [9] | 郑佳佳, 阚君武, 张广, 王炅, 欧阳青. 火炮反后坐多级独立式磁流变缓冲器可控性分析[J]. 兵工学报, 2019, 40(4): 708-717. |
| [10] | 王之千, 毛保全, 冯帅, 杨雨迎, 朱锐. 分数Maxwell黏弹性胶体阻尼缓冲器启动流模型[J]. 兵工学报, 2019, 40(10): 1977-1986. |
| [11] | 王加刚, 余永刚, 廖昌荣, 叶宇浩. 考虑边界滑移和惯性效应的磁流变液缓冲器特性分析[J]. 兵工学报, 2018, 39(4): 672-680. |
| [12] | 董盛鹏, 王雨时, 闻泉, 张志彪, 卢凤生, 刘锦春. 存在动不平衡的旋转弹丸外弹道绕质心运动过程中引信惯性力分析[J]. 兵工学报, 2017, 38(6): 1082-1089. |
| [13] | 冯江涛, 高钦和, 管文良, 李良. 多级液压缸建模及级间缓冲研究[J]. 兵工学报, 2016, 37(12): 2268-2276. |
| [14] | 李建阳, 王红岩, 芮强, 洪煌杰, 张芳. 空投缓冲气囊有限元模型修正方法[J]. 兵工学报, 2015, 36(4): 752-757. |
| [15] | 梁增友, 高位, 陈智刚. 泡沫金属/金属管塑性变形缓冲器降低弹载设备过载的数值模拟[J]. 兵工学报, 2013, 34(8): 1041-1045. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4