
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (S2): 240-250.doi: 10.12382/bgxb.2024.0780
杨子傲1,2, 曲麒富3, 孙海文4, 李烨4, 嵇振涛5,*( )
)
收稿日期:2024-09-02
上线日期:2024-12-12
通讯作者:
基金资助:
YANG Ziao1,2, QU Qifu3, SUN Haiwen4, LI Ye4, JI Zhentao5,*()
Received:2024-09-02
Online:2024-12-12
摘要:
为研究不依赖卫星的高动态飞行器自主导航方法,建立高动态飞行器的飞行动力学模型。采用数值积分法,解算出高动态飞行器轨迹信息,分析高动态飞行器飞行误差特性,并生成虚拟惯导数据。基于飞行误差特性,提出一种利用实测惯导数据与虚拟惯导数据动态加权的导航解算方法,并依靠“速度+姿态”匹配卡尔曼滤波方法进一步抑制导航误差。通过对内嵌飞行动力学的惯性基深耦合导航方法进行仿真,验证所提出的深耦合导航方法。仿真结果表明,新方法能够大幅度提升导航精度,在预置飞行轨迹偏差程度不同的情况下,新方法对导航效果的提升幅度分别达到97.1%、72.9%和40%。
杨子傲, 曲麒富, 孙海文, 李烨, 嵇振涛. 内嵌飞行动力学的高动态飞行器惯性基深耦合导航方法[J]. 兵工学报, 2024, 45(S2): 240-250.
YANG Ziao, QU Qifu, SUN Haiwen, LI Ye, JI Zhentao. Inertial-based Deep-coupling Navigation Method with Embedded Flight Dynamics[J]. Acta Armamentarii, 2024, 45(S2): 240-250.
图1 坐标系示意图
Fig.1 Coordinate system
图2 高动态飞行器受力分析图
Fig.2 Force analysis diagram of high dynamic flight vehicle
图3 高动态飞行器飞行阶段示意图
Fig.3 Schematic diagram of flight phase of high dynamic flight vehicle
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 初始速度/(m·s-1) | 50 | 一级装药量/kg | 22080 |
| 发射倾角/(°) | 90 | 一级推进时间/s | 61.6 |
| 发射偏角/(°) | 90 | 二级装药量/kg | 6246 |
| 初始质量/kg | 34335 | 二级推进时间/s | 65.2 |
| 装药量/kg | 31759 | 三级装药量/kg | 3317 |
| 燃料比冲/(N·s·kg-1) | 2393 | 三级推进时间/s | 59.6 |
| 旋转体释放时间/s | 550 | 垂直上升时间/s | 1.49 |
| 飞行器半径/m | 0.72 | 旋转体半径/m | 0.27 |
表1 高动态飞行器发射初始条件
Table 1 Initial conditions for high dynamic flight vehicle launch
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 初始速度/(m·s-1) | 50 | 一级装药量/kg | 22080 |
| 发射倾角/(°) | 90 | 一级推进时间/s | 61.6 |
| 发射偏角/(°) | 90 | 二级装药量/kg | 6246 |
| 初始质量/kg | 34335 | 二级推进时间/s | 65.2 |
| 装药量/kg | 31759 | 三级装药量/kg | 3317 |
| 燃料比冲/(N·s·kg-1) | 2393 | 三级推进时间/s | 59.6 |
| 旋转体释放时间/s | 550 | 垂直上升时间/s | 1.49 |
| 飞行器半径/m | 0.72 | 旋转体半径/m | 0.27 |

图4 高动态飞行器飞行轨迹
Fig.4 Flight trajectory of high dynamic flight vehicle

图5 导航算法框架图
Fig.5 Navigation algorithm framework
| 参数 | 数值 |
|---|---|
| 陀螺仪零偏/((°)·h-1) | 10 |
| 加速度计零偏/mg | 10 |
| 发射初速偏差均值/% | 2 |
| 发射倾角偏差均值/% | 0.03 |
| 发射偏角偏差均值/% | 0.015 |
表2 仿真条件设置
Table2 Simulation condition setting
| 参数 | 数值 |
|---|---|
| 陀螺仪零偏/((°)·h-1) | 10 |
| 加速度计零偏/mg | 10 |
| 发射初速偏差均值/% | 2 |
| 发射倾角偏差均值/% | 0.03 |
| 发射偏角偏差均值/% | 0.015 |

图6 分阶段角速度与加速度误差曲线
Fig.6 Phase-wise angular velocity and acceleration error curves
| 阶段 | 角速度误差阈值 | 加速度误差阈值 |
|---|---|---|
| 非旋转段 | 0.0000634 | 0.2445 |
| 旋转段 | 0.0746 | 0.0457 |
表3 角速度与加速度误差阈值
Table 3 Angular velocity and acceleration error threshold
| 阶段 | 角速度误差阈值 | 加速度误差阈值 |
|---|---|---|
| 非旋转段 | 0.0000634 | 0.2445 |
| 旋转段 | 0.0746 | 0.0457 |
图7 情景1中高动态飞行器导航位置误差曲线
Fig.7 Scenario 1:navigation position error curve of high dynamic flight vehicle
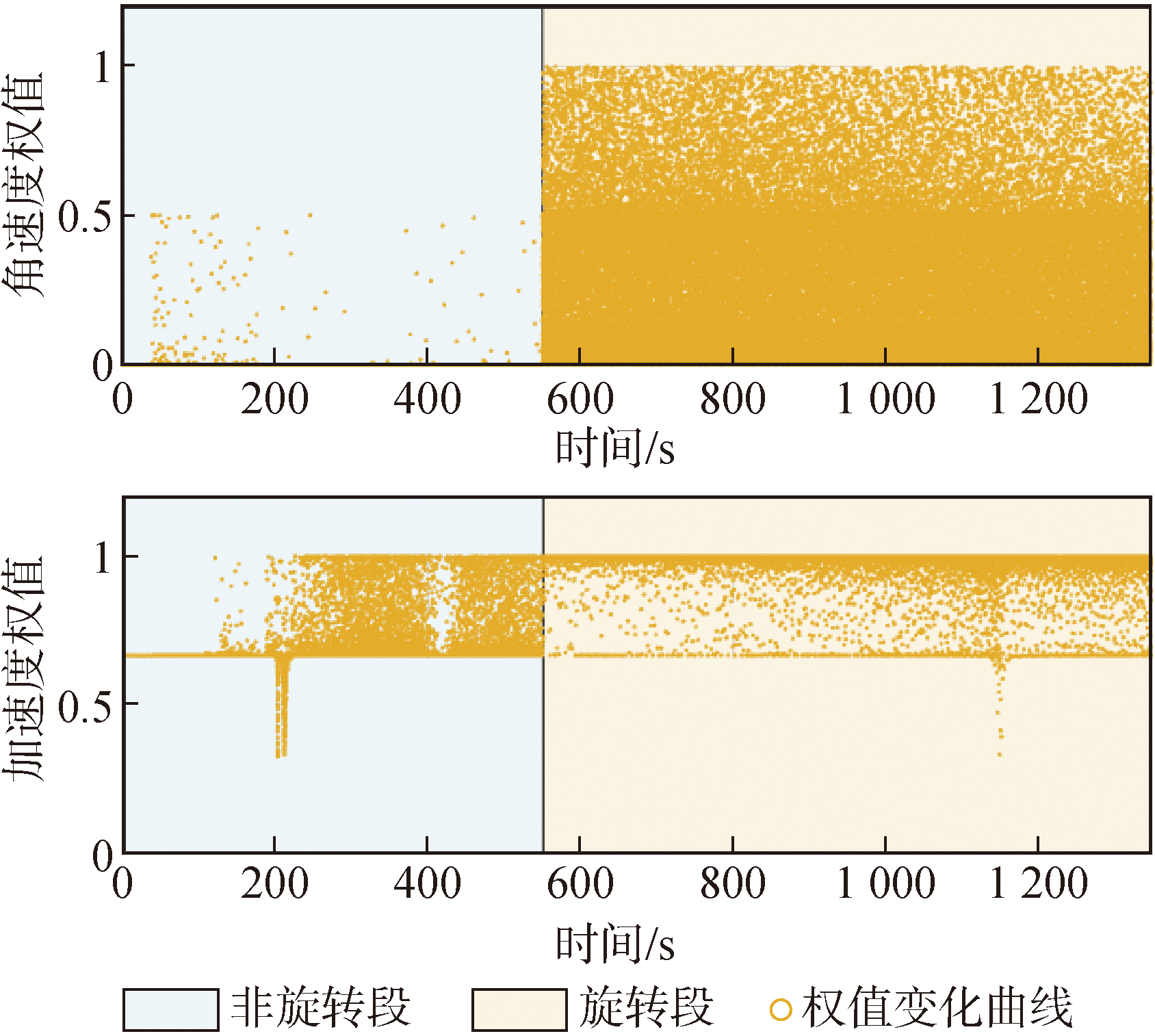
图8 情景1中高动态飞行器权值变化曲线
Fig.8 Scenario 1:weight variation curve of high dynamic flight vehicle
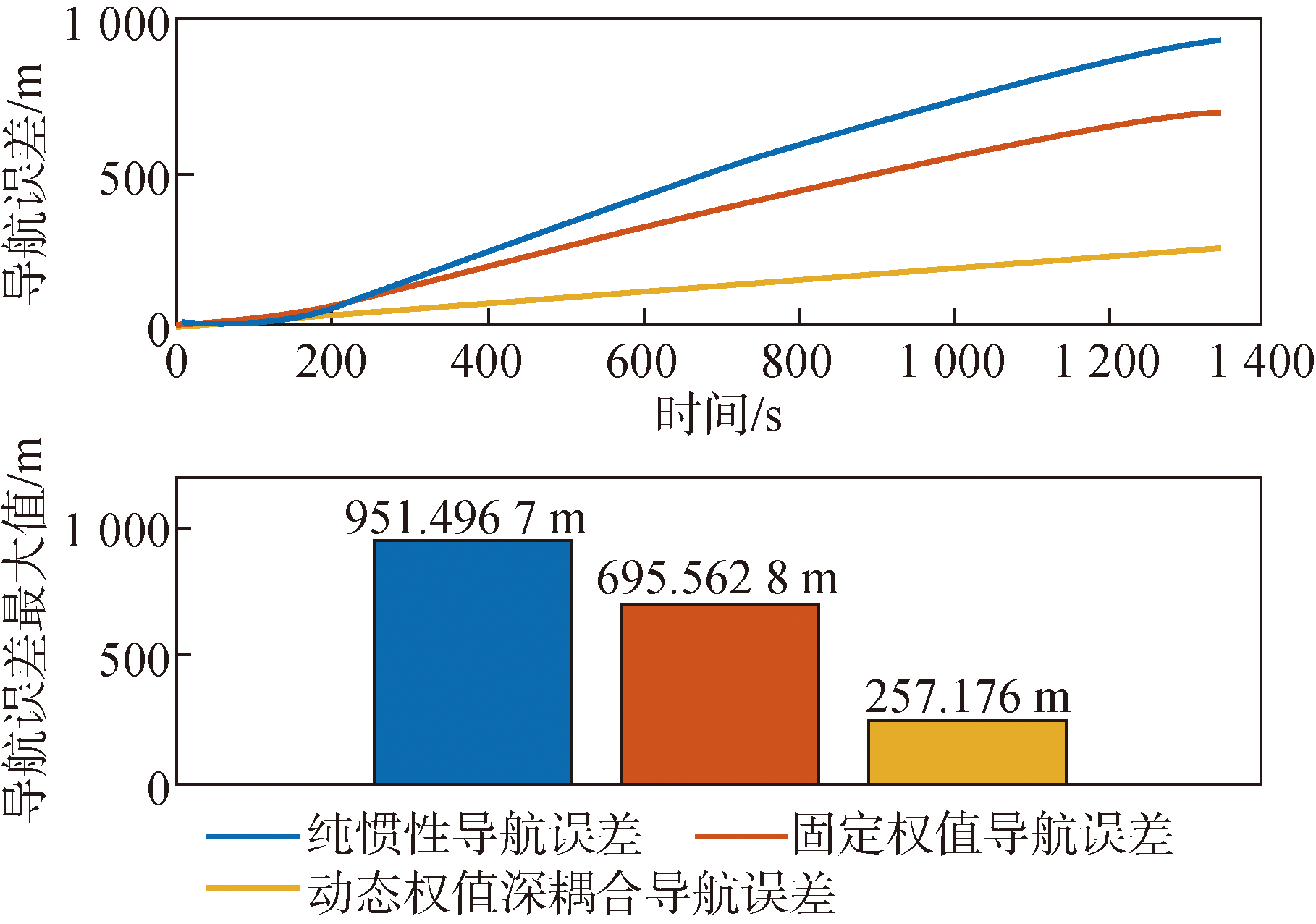
图9 情景2中高动态飞行器导航位置误差曲线
Fig.9 Scenario 2:navigation position error curve of high dynamic flight vehicle

图10 情景2中高动态飞行器权值变化曲线
Fig.10 Scenario 2:weight variation curve of high dynamic flight vehicle
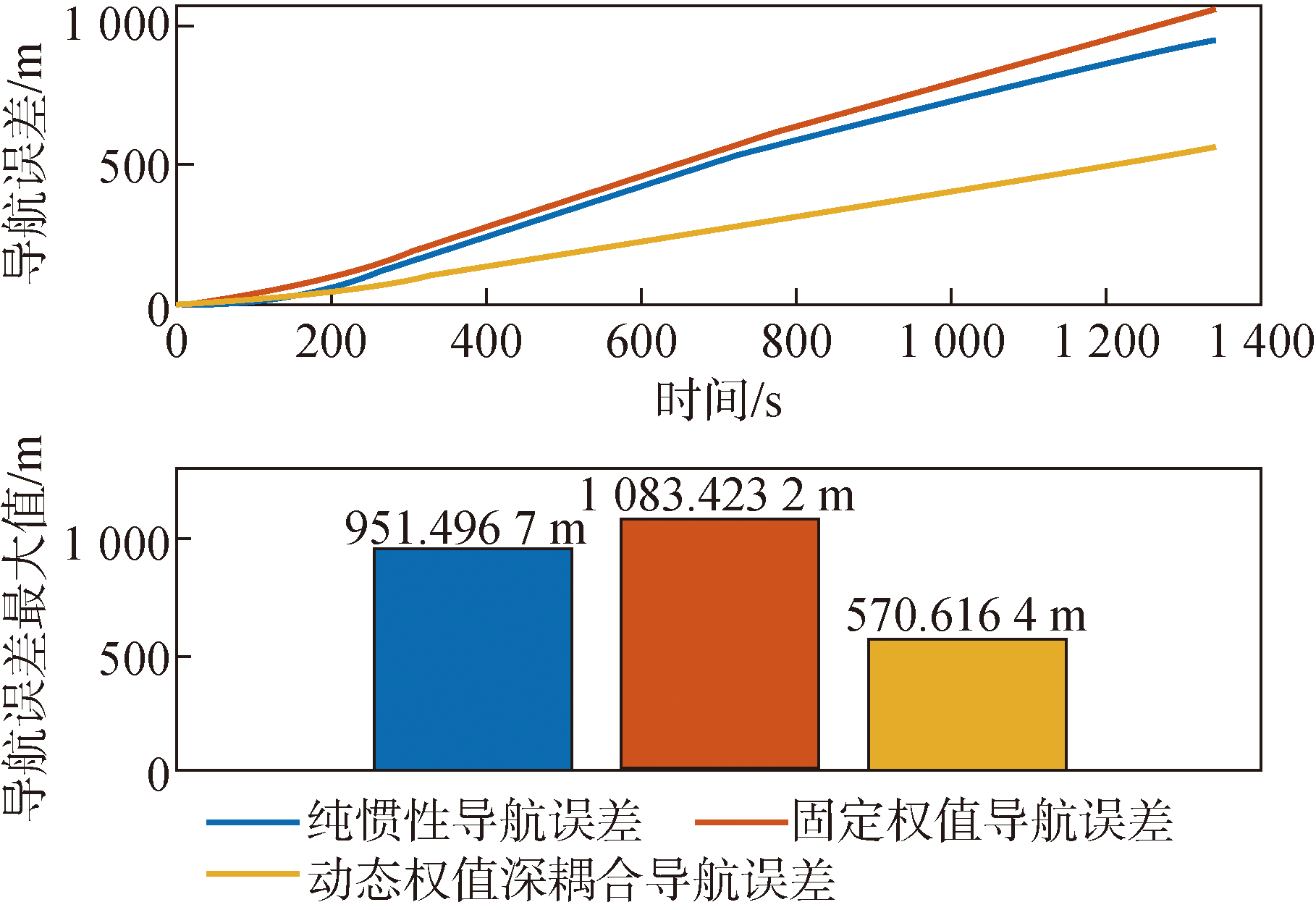
图11 情景3中高动态飞行器导航位置误差曲线
Fig.11 Scenario 3:navigation position error curve of high dynamic flight vehicle

图12 情景3中高动态飞行器权值变化曲线
Fig.12 Scenario 3:weight variation curve of high dynamic flight vehicle
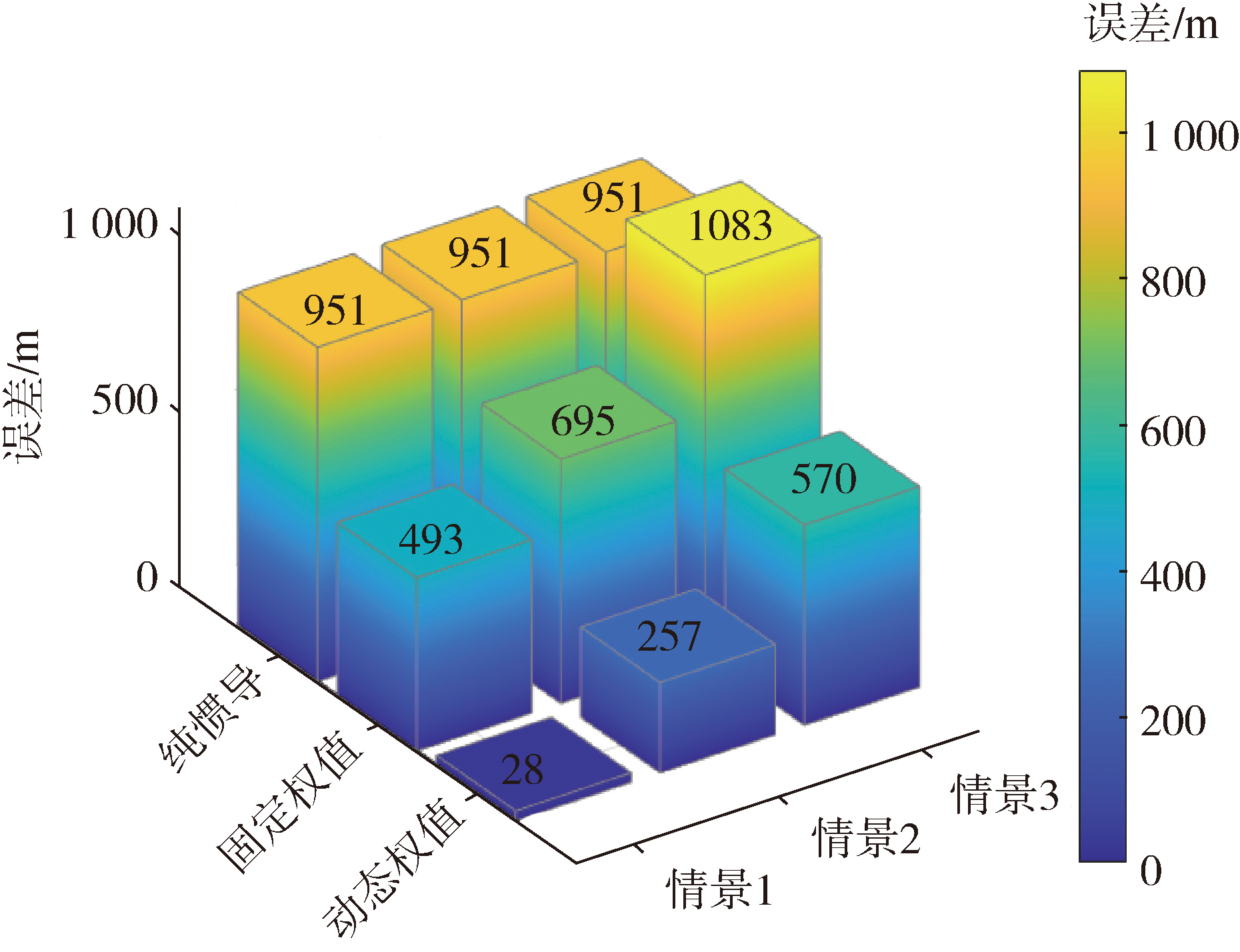
图13 不同导航方式导航结果统计图
Fig.13 Statistics of navigation results for different navigation modes
| [1] |
付梦印, 邓志红, 闫莉萍, 等. Kalman滤波理论及其在导航系统中的应用[M]. 北京: 科学出版社, 2024.
|
|
|
|
| [2] |
曹正阳, 张冰, 白屹轩, 等. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(增刊2):157-166.
|
|
doi: 10.12382/bgxb.2023.0860 |
|
| [3] |
|
| [4] |
|
| [5] |
安科宇. 基于动基座传递对准的高超声速飞行器SINS/BDS/SAR组合导航技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2023.
|
|
|
|
| [6] |
王文龙, 王晓芳, 林海, 等. 拒止环境下多弹协同导航及编队优化设计[J]. 飞行力学, 2022, 40(6):61-71.
|
|
|
|
| [7] |
|
| [8] |
张新睿, 熊智, 华冰, 等. 基于惯性/天文深度融合的跨域飞行器异构多源组合导航方法[J/OL]. 航空学报. https://link.cnki.net/urlid/11.1929.v.20240528.1400.002.
|
|
|
|
| [9] |
杨龙河, 王小军. 地心地固系下天文/惯性组合导航算法[J]. 光学与光电技术, 2022, 20(6):75-81.
|
|
|
|
| [10] |
王伟东, 李革, 刘佳琪, 等. 一种基于惯导/地磁信息融合的低成本组合导航方法[J]. 导弹与航天运载技术, 2019(6):64-69.
|
|
|
|
| [11] |
景羿铭, 王融, 熊智, 等. 空天飞行器多源多余度模糊容错导航系统设计方法[J]. 兵工学报, 2020, 41(4):670-680.
doi: 10.3969/j.issn.1000-1093.2020.04.006 |
|
doi: 10.3969/j.issn.1000-1093.2020.04.006 |
|
| [12] |
|
| [13] |
何劢航, 孙付平, 肖凯, 等. 自适应前后向平滑算法在组合导航中的应用[J]. 导航定位学报, 2022, 10(6):151-156.
|
|
|
|
| [14] |
高书亮, 段鹏飞, 樊思思, 等. 面向失锁在线补偿的高超声速飞行器组合导航方法研究[J]. 航空科学技术, 2023, 34(2):19-25.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
吕嘉睿, 朱锋. 惯性推算误差抑制的神经网络自学习模型设计与验证[J]. 导航定位与授时, 2024, 11(3):66-75.
|
|
|
|
| [20] |
焦泽德, 魏宗康, 高荣荣. 面向战略导弹的新一代惯性系统[J]. 导航与控制, 2021, 20(4):1-8.
doi: 10.3969/j.issn.1674-5558.2021.04.001 |
|
|
|
| [21] |
严恭敏,
|
|
|
| [1] | 王泳安, 李东光, 吴浩, 刘洋. 一种自适应滤波与干扰观测器相结合的大型舰船状态估计算法[J]. 兵工学报, 2024, 45(7): 2318-2328. |
| [2] | 梁苑, 戚国庆, 陈烨, 李银伢, 盛安冬. 不完全量测下事件触发水面扩展目标跟踪[J]. 兵工学报, 2024, 45(4): 1219-1228. |
| [3] | 申程, 张连超, 张卓, 朱文亮, 陈雨康. 轻量化弹道解算系统火控修正和瞄准线滤波预测[J]. 兵工学报, 2024, 45(2): 429-442. |
| [4] | 刘增力, 张文, 曹奇宏, 赵宣植, 刘康, 曾赛. 面向三维目标跟踪的状态转换卡尔曼滤波方法[J]. 兵工学报, 2024, 45(11): 3998-4010. |
| [5] | 李兆冬, 赵熙俊, 杨婷婷, 齐晓隆, 周昌仪, 张立明. 越野环境下高精地图关键技术和应用展望[J]. 兵工学报, 2023, 44(S2): 1-11. |
| [6] | 邓廷祥, 任鹏, 程甲, 汪建兵, 梁振杰, 相征. 面向集群协同的两点相对定位技术[J]. 兵工学报, 2023, 44(S2): 22-34. |
| [7] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [8] | 刘灿, 王辉, 林德福, 崔晓曦, 徐晗晖. 存在非高斯重尾分布噪声的纯方位目标跟踪算法[J]. 兵工学报, 2023, 44(5): 1469-1481. |
| [9] | 熊光明, 于全富, 胡秀中, 周子杰, 许佳慧. 考虑平台特性的多层建筑物内履带式无人平台运动规划[J]. 兵工学报, 2023, 44(3): 841-850. |
| [10] | 万芯炜, 王晶, 杨辉, 李毅, 张远再, 王路. BP神经网络结合粒子群优化卡尔曼滤波的MEMS陀螺随机误差补偿方法[J]. 兵工学报, 2023, 44(2): 556-565. |
| [11] | 李光保, 高栋, 路勇, 平昊, 周愿愿. 基于SSA-PID和卡尔曼滤波控制的发射筒充氮系统设计[J]. 兵工学报, 2022, 43(S2): 153-163. |
| [12] | 戴宗武, 张少甫, 刘乃强, 胡月, 王喆, 段岑薇, 孙宇哲. 用于自主导航的SAR/多普勒雷达一体化技术设计[J]. 兵工学报, 2022, 43(12): 3093-3102. |
| [13] | 陈雨荻, 熊智, 刘建业, 杨闯, 晁丽君, 彭杨. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43(11): 2965-2980. |
| [14] | 梅程, 彭建鑫, 胡宇辉. 单轴并联混合动力商用车整车总质量在线估计算法[J]. 兵工学报, 2021, 42(9): 1838-1846. |
| [15] | 陈林秀, 郝明瑞, 赵佳佳. 混合噪声条件下的目标被动定位算法[J]. 兵工学报, 2021, 42(9): 1923-1930. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4