
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (10): 3718-3731.doi: 10.12382/bgxb.2023.0823
王亮, 汪首坤*( ), 牛天伟, 王军政
), 牛天伟, 王军政
收稿日期:2023-08-29
上线日期:2024-03-18
通讯作者:
基金资助:
WANG Liang, WANG Shoukun*(), NIU Tianwei, WANG Junzheng
Received:2023-08-29
Online:2024-03-18
摘要:
为提高复杂环境下无人特种车辆安全性、自主性及作业能力,面向在崎岖地形下无人特种车辆应用需求,提出一种基于地形特征时频变换的速度自适应控制方法。通过度量地形特征崎岖度、建立崎岖度和车速数学模型,实现无人特种车辆在崎岖地形的自主、自适应车速规划。针对崎岖地形和坡度引起的点云数据失真问题,融合惯性测量单元传感器数据对点云进行补偿,获得了车辆前方地形的精准点云数据;针对可视距离与跟踪精度冲突问题,不同于传统横向曲率计算方式,采用以线到面的方式,将激光雷达纵向剖面点云数据进行时频变换后,在频域内选取次频区域的积分面积作为崎岖度量化值,实现对不同地形下的崎岖度量化;此外,基于上述获得的崎岖度,采用迭代搜索的方式建立速度与崎岖度数学模型,并采用滑动窗口的方式更新崎岖度,实现车速到崎岖度之间的连续映射。以可控震源野外勘探特种车为研究对象,采用上述方法在实际野外地形环境中进行多次实验。实验结果表明,所提出的方法在崎岖地形具有良好的安全性、自主性,可以识别地形和自适应控制车速。
中图分类号:
王亮, 汪首坤, 牛天伟, 王军政. 基于地形特征时频变换的无人特种车辆速度自适应控制方法[J]. 兵工学报, 2024, 45(10): 3718-3731.
WANG Liang, WANG Shoukun, NIU Tianwei, WANG Junzheng. Speed Control Method for Unmanned Special Vehicle Based on Terrain Feature Time-frequency Transform[J]. Acta Armamentarii, 2024, 45(10): 3718-3731.

图1 基于频域内地形特征的特种车速度自适应控制
Fig.1 Speed adaptive control based on terrain features in frequency domain
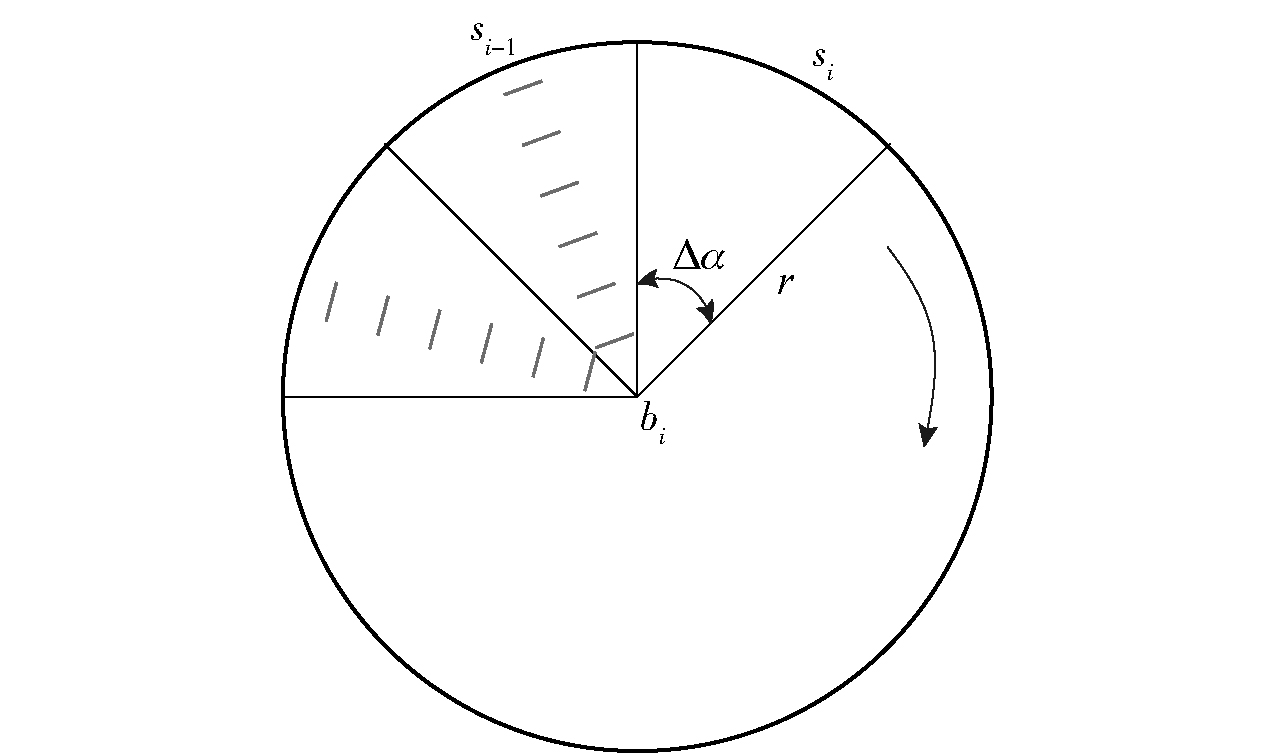
图2 激光线束等间隔划分
Fig.2 Equidistant division of laser beams
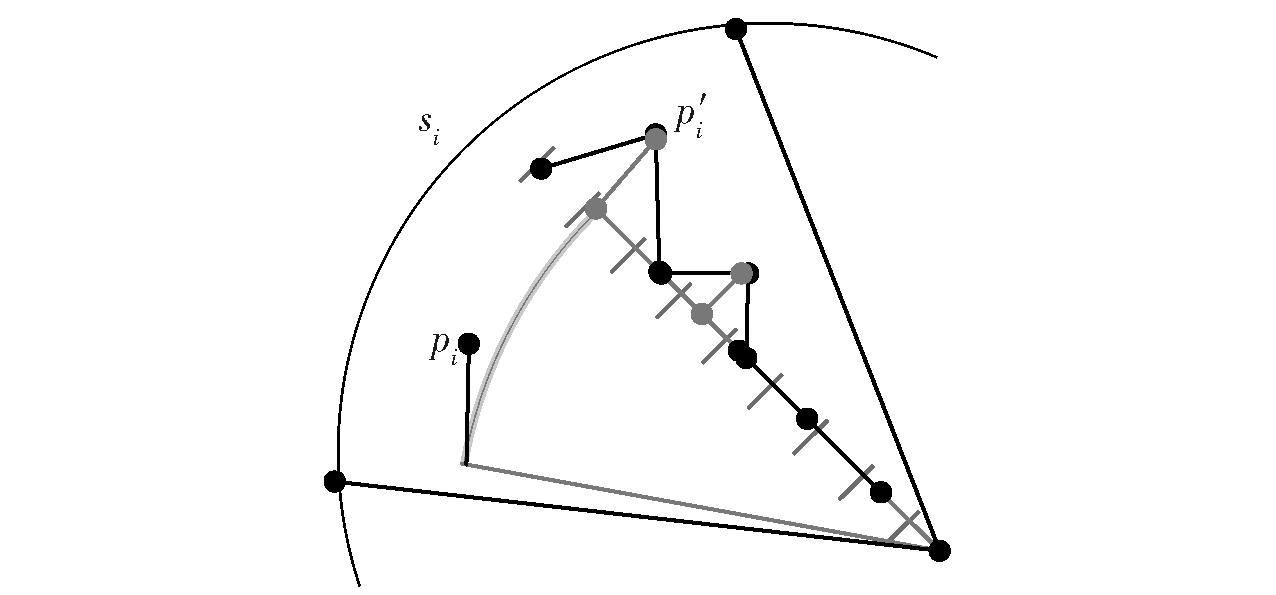
图3 对segment进行单元栅格划分
Fig.3 Unit grid division of segments

图4 车辆速度自适应调整策略
Fig.4 Vehicle speed a adaptive djustment strategy

图5 模拟复合式地形纵向剖面点云z值
Fig.5 z value map of simulated composite terrain longitudinal section point cloud

图6 不同采样频率对应幅频特性
Fig.6 Amplitude-frequency characteristic curves corresponding to different sampling frequencies
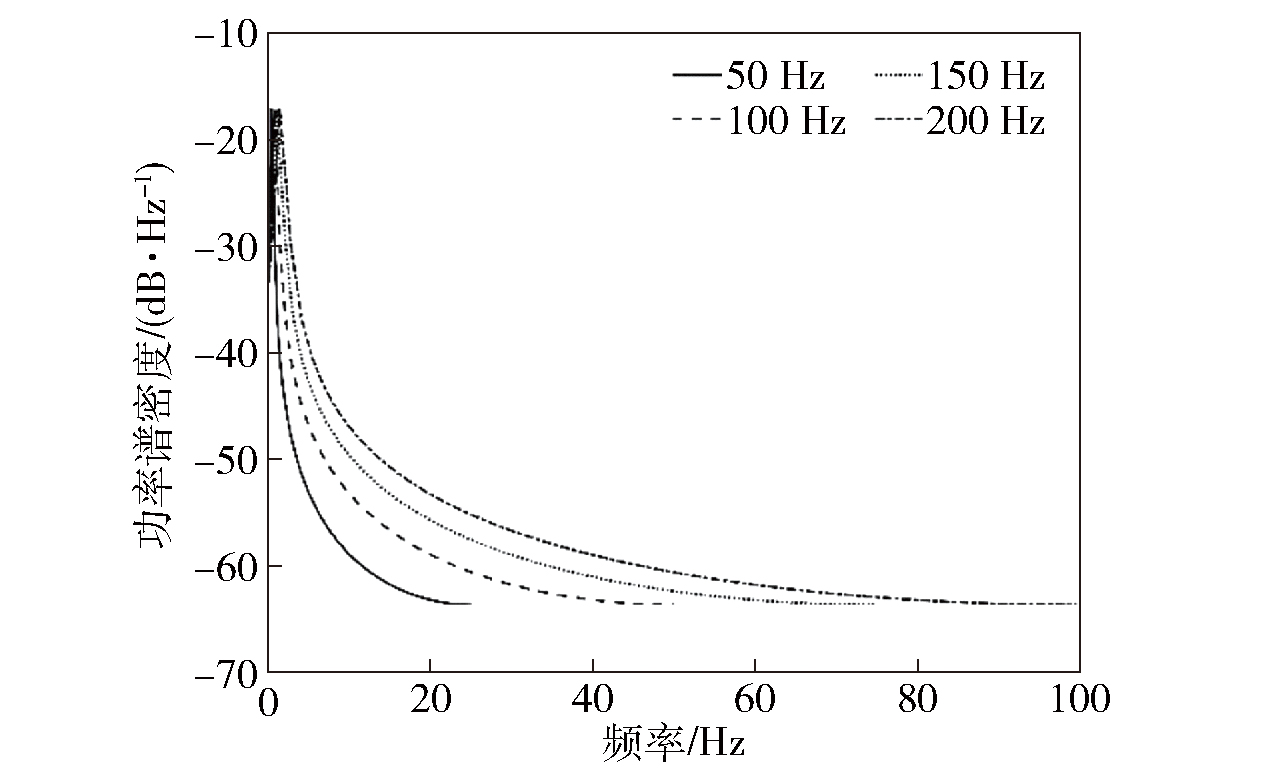
图7 不同采样频率对应功率谱密度
Fig.7 Power spectral density curves corresponding to different sampling frequencies
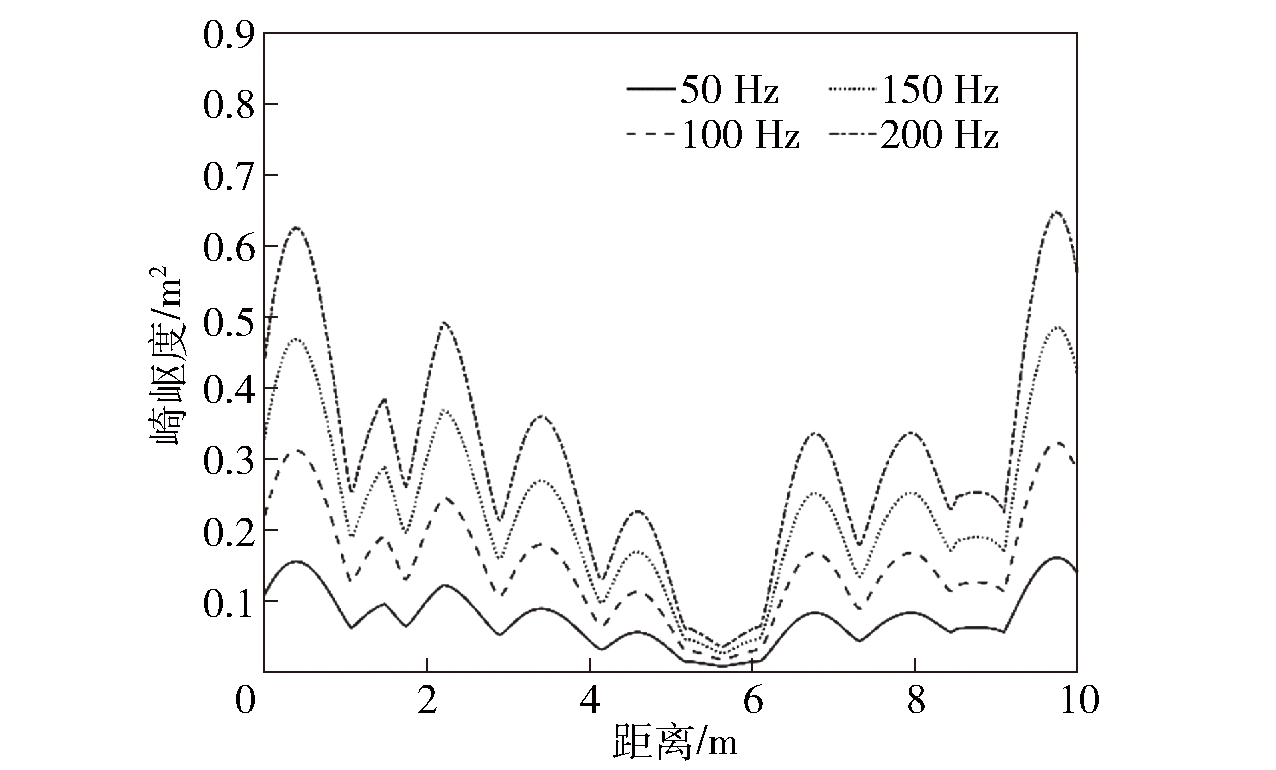
图8 不同采样频率对应崎岖度变化曲线图
Fig.8 Different sampling frequencies corresponding to the change curves of roughness

图9 车载激光地形扫描实验平台
Fig.9 Vehicle-mounted laser terrain scanning experimental platform

图10 硬件连接以及通信方式
Fig.10 Hardware connection and communication method
| 参数 | 数值 |
|---|---|
| 震源车长度/m | 10.0 |
| 震源车宽度/m | 3.38 |
| 震源车高度/m | 3.6 |
| 震源车前后轴距/m | 4 |
| 激光雷达距地高度/m | 1.4 |
| 激光雷达扫描频率/Hz | 20 |
| 激光雷达水平扫描范围/(°) | 360 |
| 激光雷达垂直扫描范围/(°) | -55~15 |
| 激光雷达有效测量距离/m | 150 |
| GPS频率/Hz | 20 |
| GPS定位精度/m | 0.01 |
| IMU频率/Hz | 50 |
| IMU精度/(°) | 0.05 |
表1 实验平台参数表
Table 1 Experimental platform parameters
| 参数 | 数值 |
|---|---|
| 震源车长度/m | 10.0 |
| 震源车宽度/m | 3.38 |
| 震源车高度/m | 3.6 |
| 震源车前后轴距/m | 4 |
| 激光雷达距地高度/m | 1.4 |
| 激光雷达扫描频率/Hz | 20 |
| 激光雷达水平扫描范围/(°) | 360 |
| 激光雷达垂直扫描范围/(°) | -55~15 |
| 激光雷达有效测量距离/m | 150 |
| GPS频率/Hz | 20 |
| GPS定位精度/m | 0.01 |
| IMU频率/Hz | 50 |
| IMU精度/(°) | 0.05 |
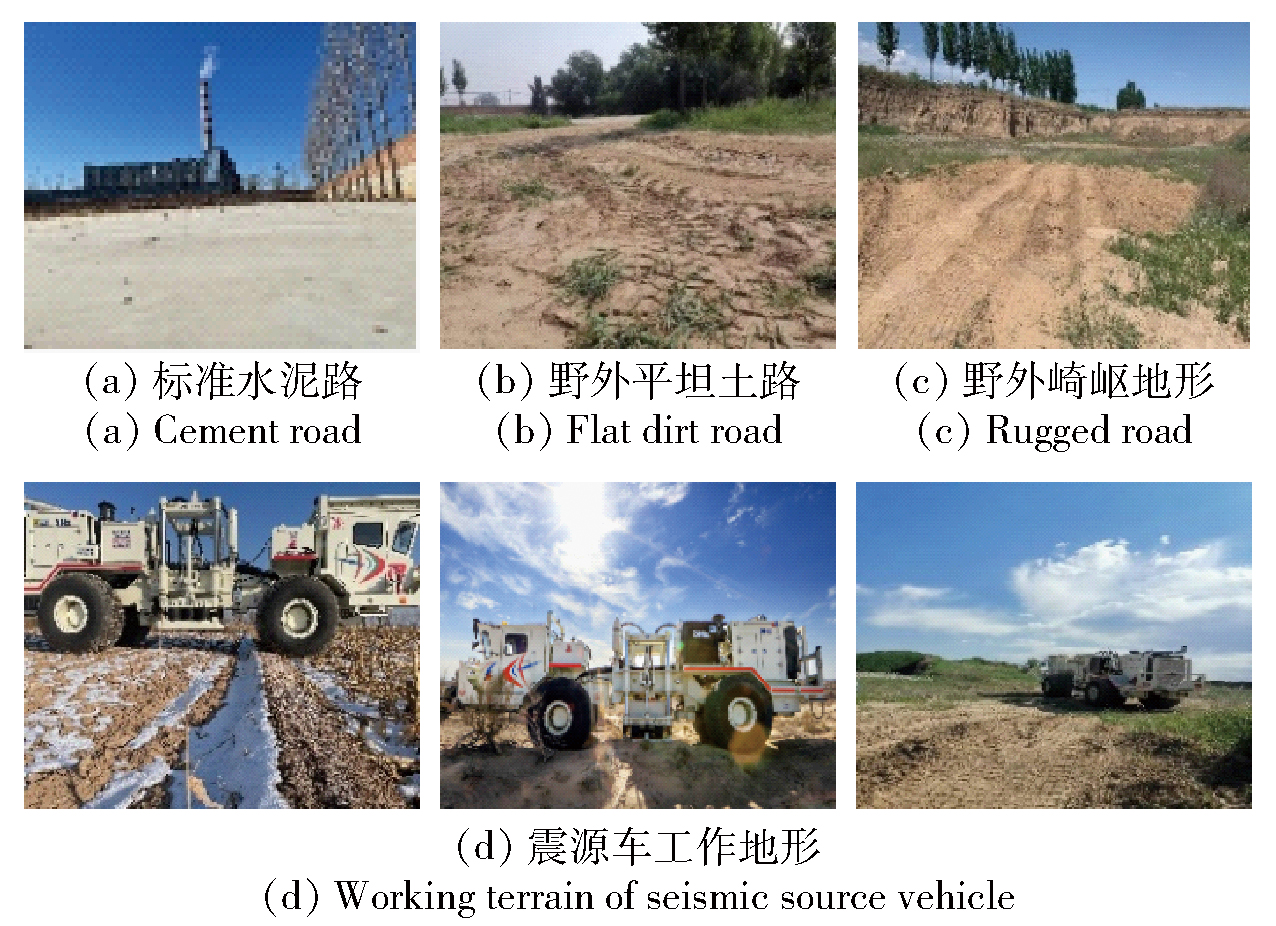
图11 实验所采集复合式地形实景
Fig.11 Composite terrain real scene collected by the laboratory

图12 所扫描的崎岖地形及其点云图
Fig.12 Scanned rugged terrain and its point cloud image
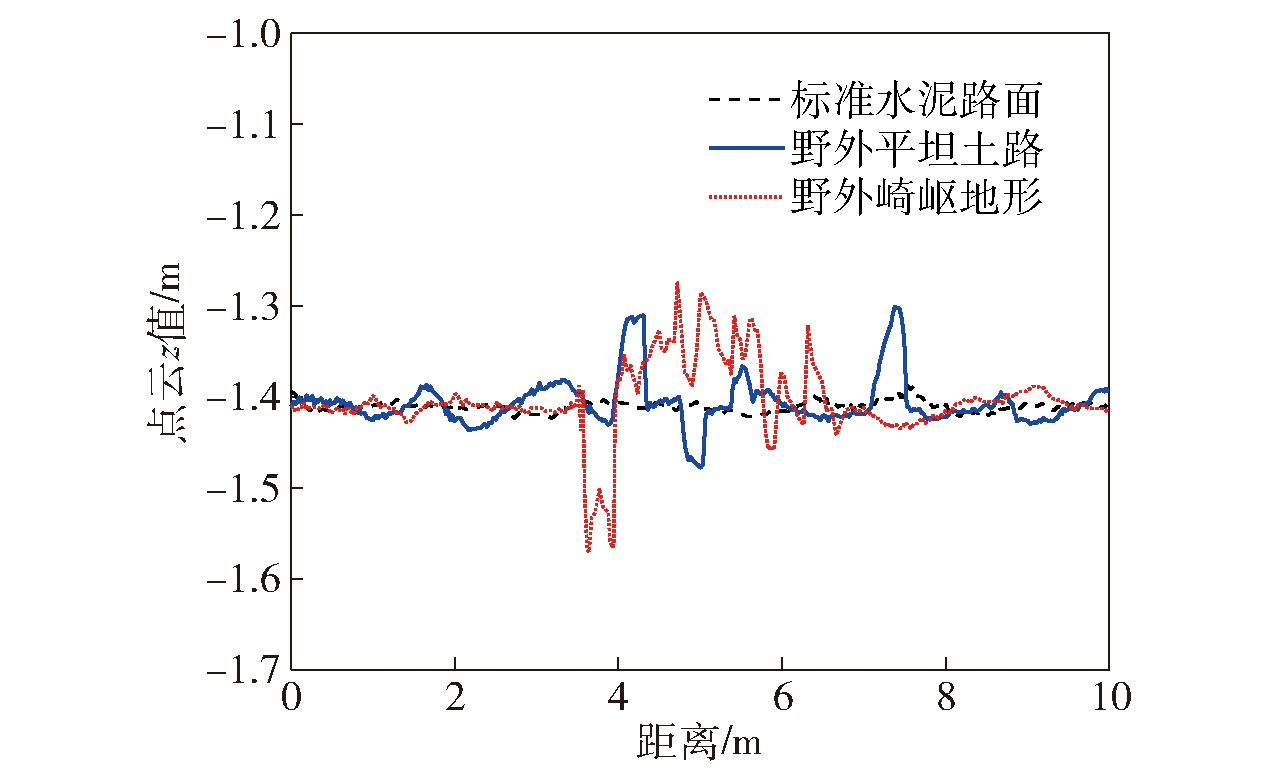
图13 3种地形的纵向剖面点云z值
Fig.13 z-value curves of the longitudinal section point clouds of three terrains
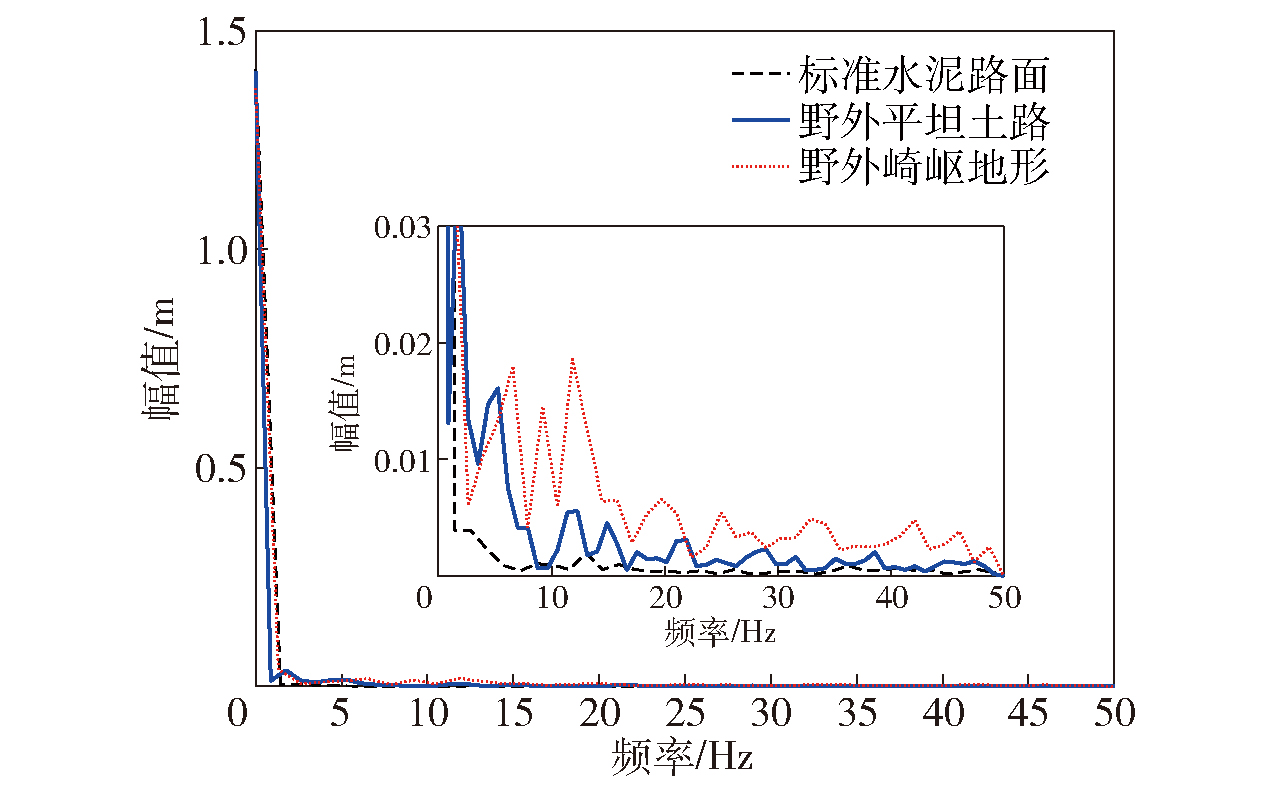
图14 地形纵向剖面点云z值幅频特性
Fig.14 Amplitude-frequency characteristic curve of z value of terrain longitudinal profile point cloud
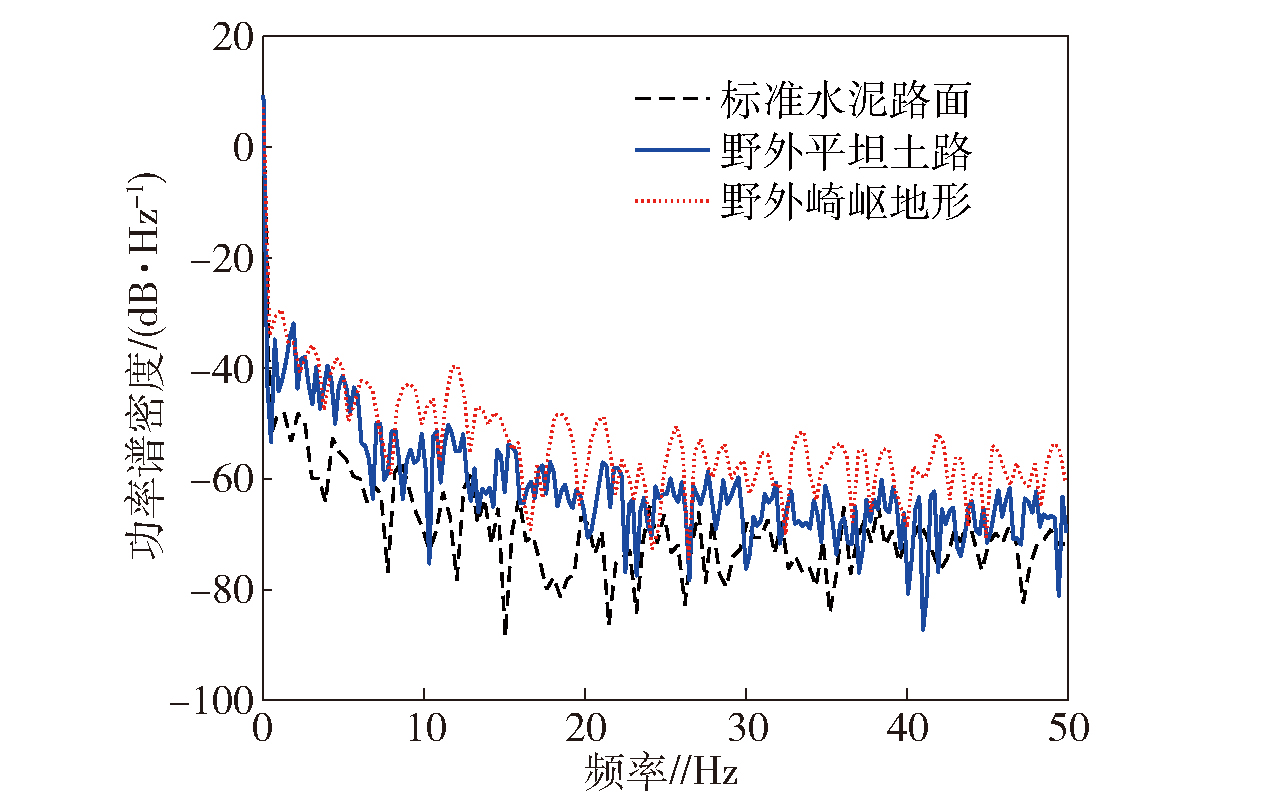
图15 地形纵向剖面点云z值功率谱密度
Fig.15 z-value power spectral density curve of terrain longitudinal profile point cloud
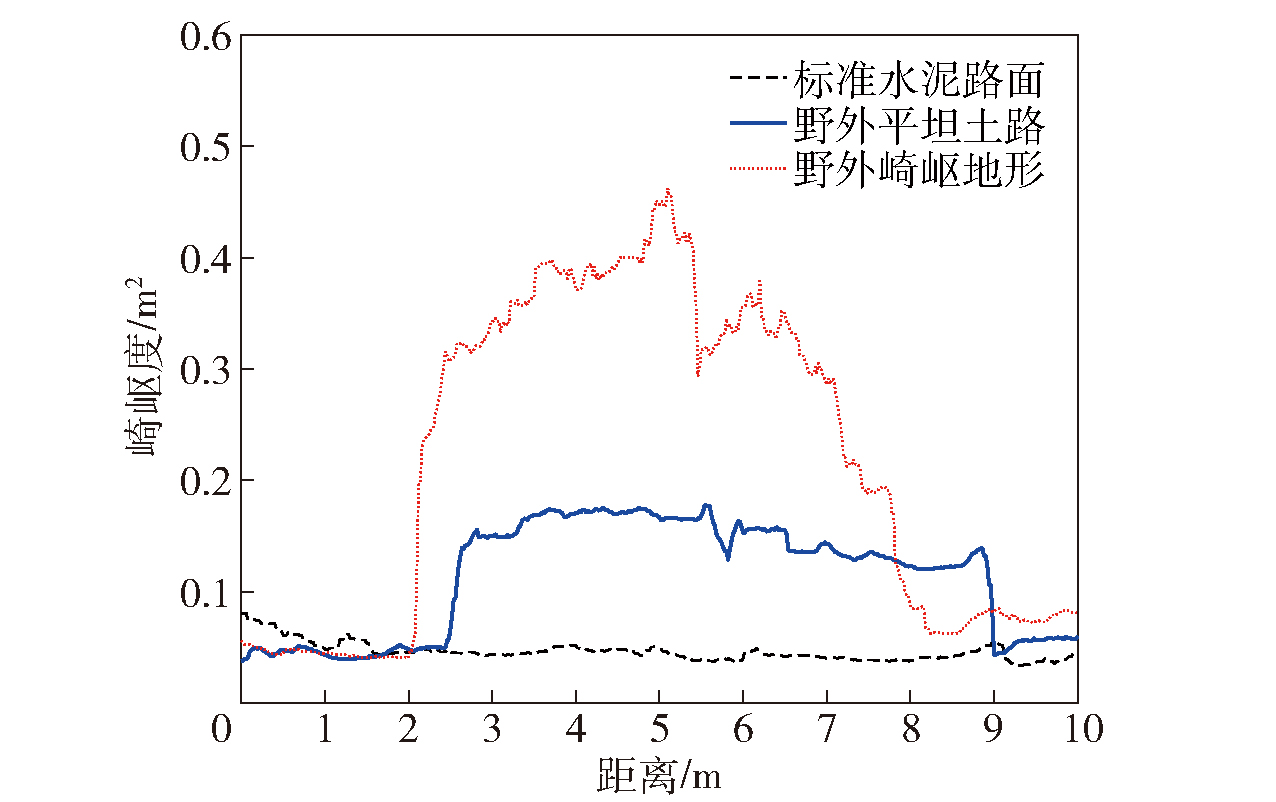
图16 地形崎岖度变化
Fig.16 Change curve of terrain roughness
| 地形 | S |
|---|---|
| 平坦地形 | S<0.09 |
| 较平坦地形 | 0.09≤S≤0.17 |
| 崎岖地形 | S>0.17 |
表2 3种地形的崎岖度阈值范围
Table 2 Ruggedness for 3 types of terrain
| 地形 | S |
|---|---|
| 平坦地形 | S<0.09 |
| 较平坦地形 | 0.09≤S≤0.17 |
| 崎岖地形 | S>0.17 |
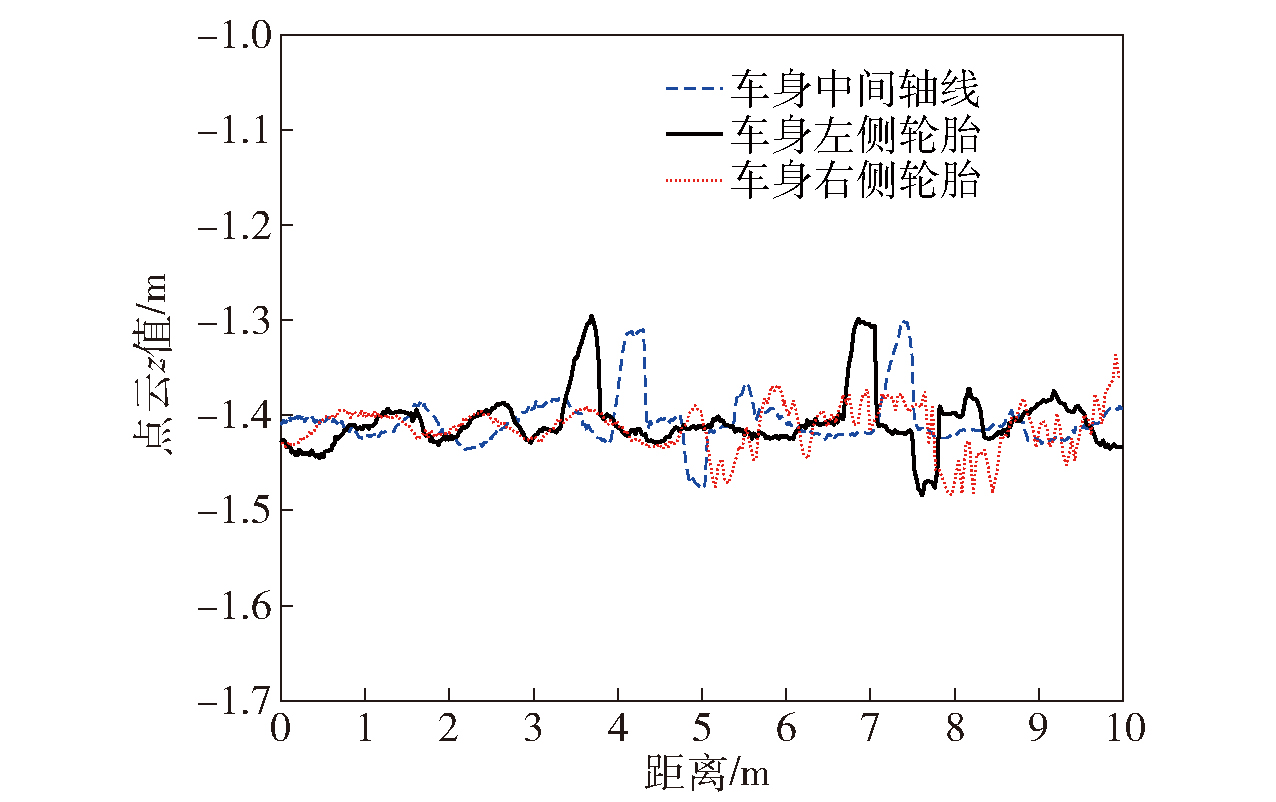
图17 野外平坦土路纵向剖面点云z值
Fig.17 z-value curve of longitudinal profile point cloud of field flat dirt road

图18 野外平坦土路崎岖度变化
Fig.18 Variation curve of field flat dirt road roughness

图19 野外平坦土路崎岖度随车速自适应变化
Fig.19 Adaptive change curve of field flat dirt road roughness with vehicle speed
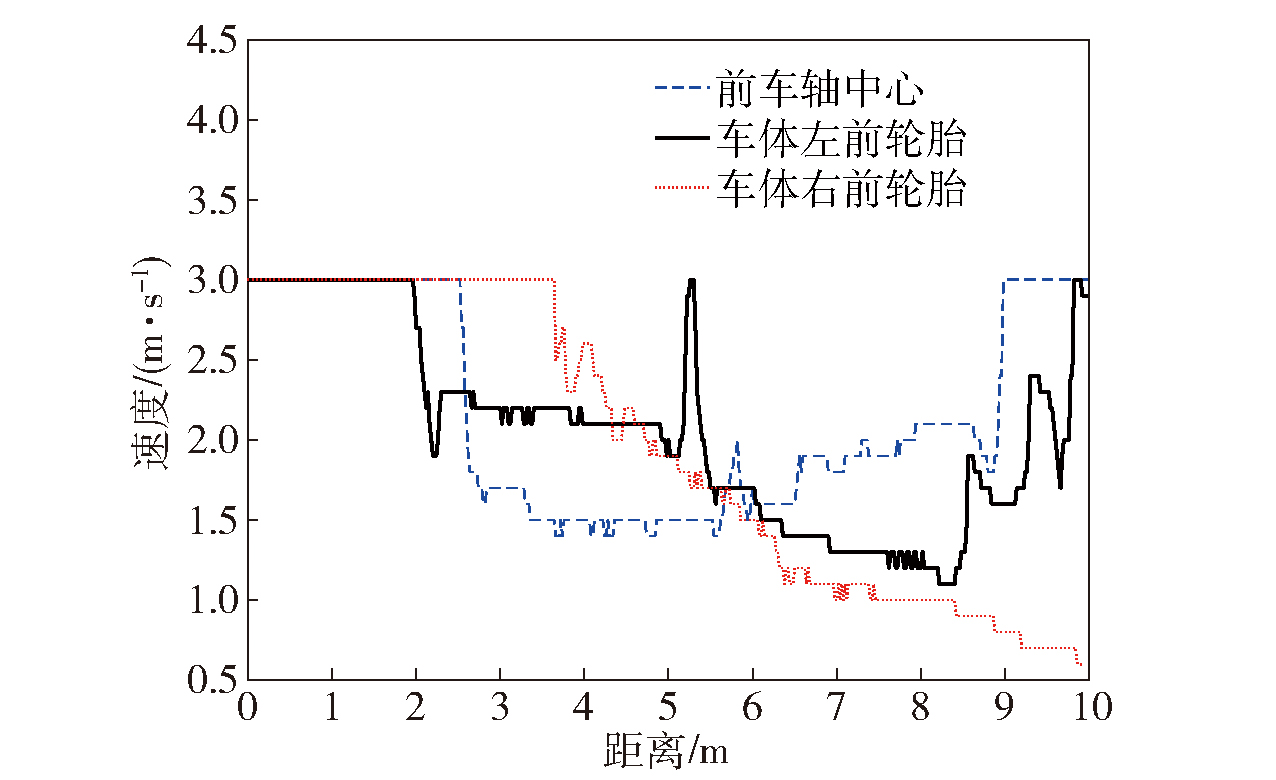
图20 前车体车速随距离自适应变化
Fig.20 Adaptive variation curve of front vehicle body speed with distance
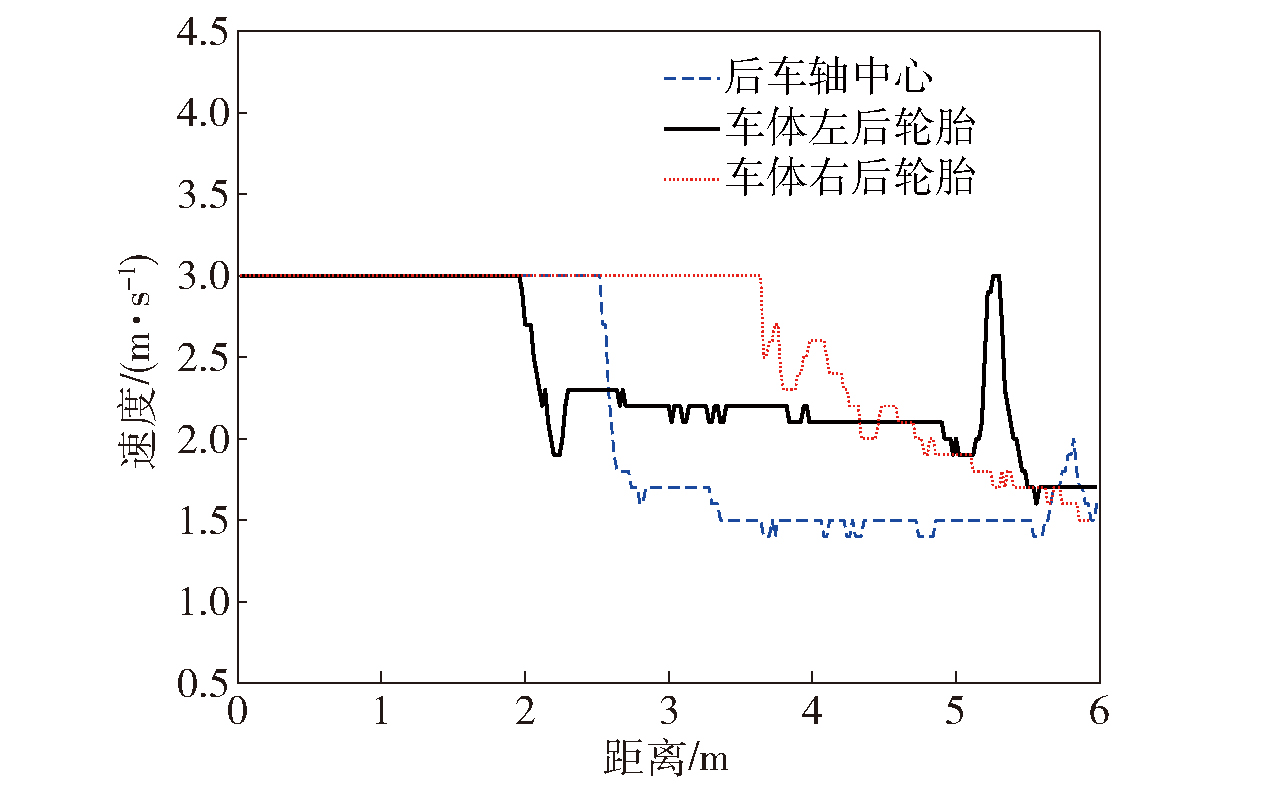
图21 后车体车速随距离自适应变化
Fig.21 Adaptive variation curve of rear vehicle speed with distance
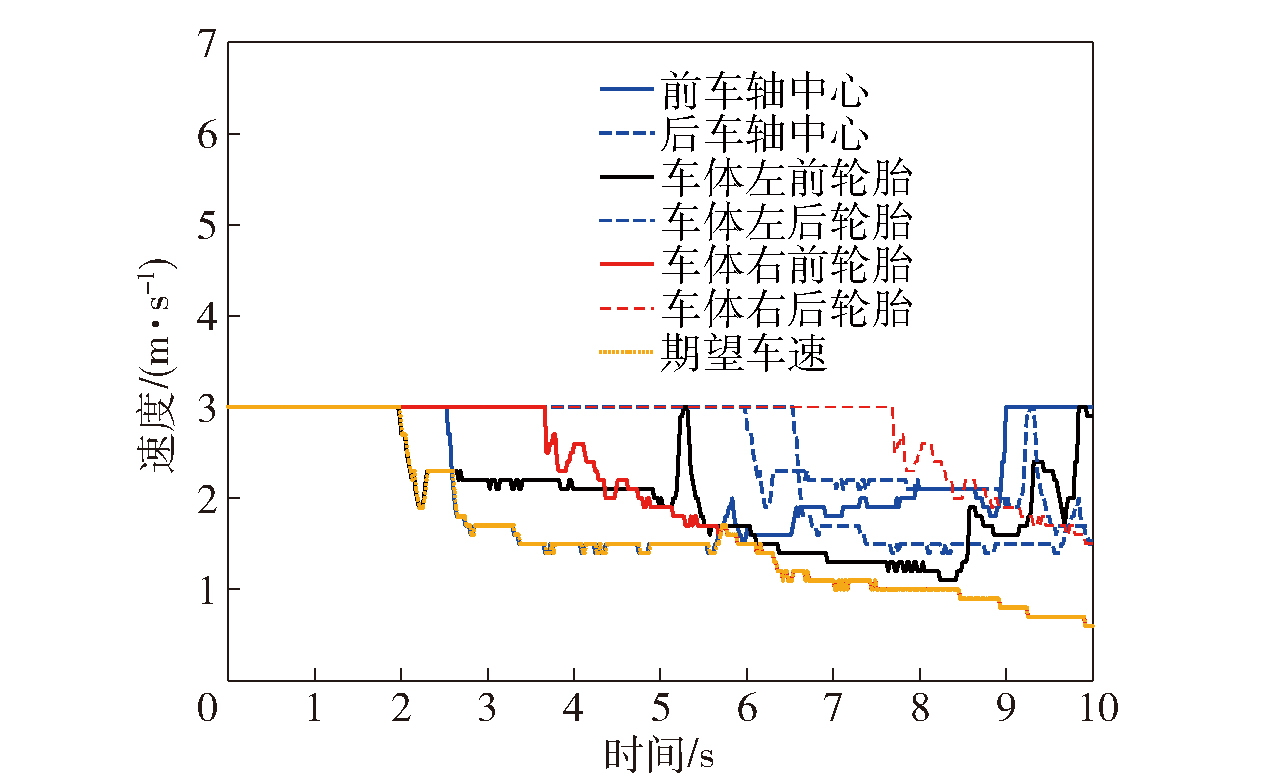
图22 车体各部位车速自适应变化
Fig.22 Speed adaptive change curve of each part of vehicle body
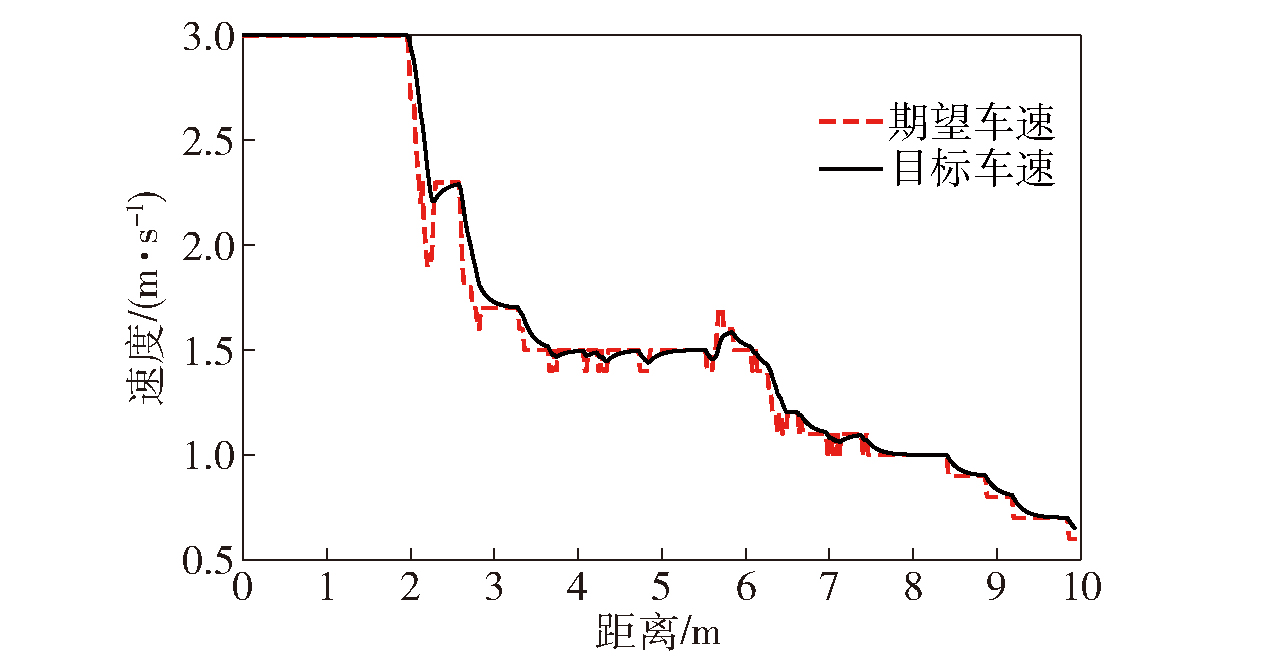
图23 目标车速随距离自适应变化
Fig.23 Adaptive change curve of target speed with distance
| [1] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [2] |
李欢欢, 刘辉, 盖江涛, 等. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924.
doi: 10.12382/bgxb.2022.0788 |
|
doi: 10.12382/bgxb.2022.0788 |
|
| [3] |
袁艺, 盖江涛, 周广明, 等. 高速电驱动履带车辆操纵特性分析[J]. 兵工学报, 2023, 44(1): 203-213.
doi: 10.12382/bgxb.2022.0764 |
|
doi: 10.12382/bgxb.2022.0764 |
|
| [4] |
张伟, 刘辉, 韩立金, 等. 混合动力履带车辆机电联合制动控制[J]. 兵工学报, 2022, 43(5): 969-981.
doi: 10.12382/bgxb.2021.0256 |
|
doi: 10.12382/bgxb.2021.0256 |
|
| [5] |
卢佳兴, 刘海鸥, 关海杰, 等. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971.
|
|
doi: 10.12382/bgxb.2022.0009 |
|
| [6] |
生辉, 项昌乐, 盖江涛, 等. 双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制[J]. 兵工学报, 2023, 44 (11): 3498-3507.
doi: 10.12382/bgxb.2022.0850 |
|
doi: 10.12382/bgxb.2022.0850 |
|
| [7] |
张杰, 马晓军, 刘春光, 等. 双侧独立电驱动履带车辆反馈线性化解耦与预测行驶控制[J]. 兵工学报, 2021, 42(4): 697-705.
|
|
doi: 10.3969/j.issn.1000-1093.2021.04.003 |
|
| [8] |
张超朋, 刘庆霄, 董昊天, 等. 无人驾驶履带车辆机电联合制动的协调控制[J]. 兵工学报, 2022, 43(11): 2727-2737.
|
|
doi: 10.12382/bgxb.2021.0784 |
|
| [9] |
刘佳, 刘海鸥, 陈慧岩, 等. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276.
|
|
doi: 10.12382/bgxb.2022.0038 |
|
| [10] |
张瑞增, 龚建伟, 陈慧岩, 等. 硬质路面条件下履带车辆转向模型分析及验证[J]. 兵工学报, 2023, 44(1): 233-246.
doi: 10.12382/bgxb.2021.0849 |
|
doi: 10.12382/bgxb.2021.0849 |
|
| [11] |
|
| [12] |
|
| [13] |
张明路, 王哲, 李满宏, 等. 基于足端位置的六足机器人漫游地形感知与表征[J]. 机械工程学报, 2021, 57(19): 48-60.
doi: 10.3901/JME.2021.19.005 |
|
|
|
| [14] |
赵健, 李雅欣, 佟静, 等. 基于车辆动力学响应特征的越野地面分类方法[J]. 汽车工程, 2022, 44(6): 909-918.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
孟祥瑞. 基于多线激光雷达的移动机器人环境感知与导航控制研究[D]. 北京: 中国科学院大学, 2018.
|
|
|
|
| [19] |
张波. 基于激光雷达的非结构化地形特征提取与表征[D]. 厦门: 厦门大学, 2016.
|
|
|
|
| [20] |
刘明, 荣学文, 李贻斌, 等. 基于地形聚类分析的移动机器人速度自适应控制[J]. 吉林大学学报 (工学版), 2021, 51(4): 1496-1505.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
余嘉星, 裴晓飞, 过学迅. 考虑路径平滑性和避撞稳定性的智能汽车弯道轨迹规划研究[J]. 汽车工程, 2022, 44(5): 656-663.
|
|
|
|
| [24] |
王猛, 陈珏璇, 邓正兴. 自动驾驶模糊神经网络速度规划方法[J]. 计算机工程与科学, 2021, 43(11): 2011.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
程金龙, 冯莹, 曹毓, 等. 车载激光雷达外参数的标定方法[J]. 光电工程, 2013, 40(12): 89-94.
|
|
|
|
| [29] |
|
| [1] | 李晓雄, 张淑宁, 赵惠昌, 陈思. 基于1DC-CGAN和小波能量特征的引信小样本地形目标识别[J]. 兵工学报, 2022, 43(10): 2545-2553. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4