
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (8): 2564-2572.doi: 10.12382/bgxb.2023.0408
孙嘉伟, 弯港*( ), 顾金良, 徐明杰, 孔筱芳
), 顾金良, 徐明杰, 孔筱芳
收稿日期:2023-05-10
上线日期:2023-08-29
通讯作者:
基金资助:
SUN Jiawei, WAN Gang*(), GU Jinliang, XU Mingjie, KONG Xiaofang
Received:2023-05-10
Online:2023-08-29
摘要:
针对水下环境恶劣、光线条件差、难以拍摄并复原高速射弹运动姿态及其超空泡演化过程等问题,采用线阵相机的交汇测量原理,设计基于线阵相机的水下射弹图像采集系统、搭建基于双线阵相机的图像采集靶面,提出一种针对水下高速超空泡目标识别与弹形复原算法。利用超空泡射弹几何关系与相机标定数据推导出射弹过靶坐标、姿态角与过靶速度公式,搭建12.7mm滑膛枪垂直发射入水实验,对系统的可行性进行验证分析。实验结果表明:该系统能够有效地进行水下射弹图像的快速采集,较完整的对弹形及空泡形态进行分离与复原,解算出射弹水下运动速度、姿态角及超空泡形态参数;系统解算出的速度与同时部署的高速摄像所处理的速度误差在1%以内,证明该系统具有较高的可靠性与实用性。
中图分类号:
孙嘉伟, 弯港, 顾金良, 徐明杰, 孔筱芳. 基于线阵相机的水下射弹动态参数及超空泡演化过程测量方法[J]. 兵工学报, 2024, 45(8): 2564-2572.
SUN Jiawei, WAN Gang, GU Jinliang, XU Mingjie, KONG Xiaofang. A Line Array Camera-based Measurement Method for Dynamic Parameters of Underwater Projectiles and Supercavitation Evolution Process[J]. Acta Armamentarii, 2024, 45(8): 2564-2572.

图1 水下射弹图像采集系统
Fig.1 Underwater projectile image acquisition system

图2 双线阵相机正交交汇测量靶面
Fig.2 Orthogonal intersection measurement target surfaceof dual line array camera

图3 射弹及超空泡原始图像
Fig.3 Original image of projectile and supercavitation

图4 射弹原始图像
Fig.4 Original image of projectile

图5 弹形复原算法
Fig.5 Shape reconstruction algorithm of projectiles

图6 射弹及超空泡真实图像
Fig.6 Real images of projectile and supercavitation

图7 射弹弹形复原图
Fig.7 Projectile shape reconstruction diagram

图8 射弹着靶坐标公式原理图
Fig.8 Principle diagram of coordinate calculation formula of projectile impact
| 参数 | 取值 |
|---|---|
| 最高数据传输速率/(Mbit·s-1) | 1000 |
| 最高行频/kHz | 80 |
| 最短曝光时间/μs | 5 |
| 图像传感器 | CMOS |
| 分辨率 | 4096 |
表1 相机参数
Table 1 Camera parameters
| 参数 | 取值 |
|---|---|
| 最高数据传输速率/(Mbit·s-1) | 1000 |
| 最高行频/kHz | 80 |
| 最短曝光时间/μs | 5 |
| 图像传感器 | CMOS |
| 分辨率 | 4096 |
| 参数 | 取值 |
|---|---|
| 焦距/mm | 20 |
| 镜头结构 | 11组14片 |
| 最大光圈 | f/1.8 |
| 视角/(°) | 94 |
| 接口 | 尼康z卡口 |
| 尺寸/mm | 84.5×108.5 |
表2 镜头参数
Table 2 Lens parameters
| 参数 | 取值 |
|---|---|
| 焦距/mm | 20 |
| 镜头结构 | 11组14片 |
| 最大光圈 | f/1.8 |
| 视角/(°) | 94 |
| 接口 | 尼康z卡口 |
| 尺寸/mm | 84.5×108.5 |

图9 线阵相机与镜头
Fig.9 Line array cameras and lens

图10 测量实验布置
Fig.10 Test layout

图11 射弹与超空泡原始图像
Fig.11 Original images of projectile and supercavitation

图12 弹形与超空泡复原图
Fig.12 Reconstructed images of projectile and supercavitation

图13 高速摄像拍摄射弹图像
Fig.13 Projectile image captured by the high-speed camera

图14 弹形恢复图
Fig.14 Reconstructed images of projectile shape

图15 超空泡高速射弹模型几何尺寸示意图
Fig. 15 Schematic diagram of the sizes of supercavitation high-speed projectile model

图16 射弹复原后的几何尺寸
Fig.16 Sizes of recovered projectile
| 发射次数 | 左侧线阵相机 测速/(m·s-1) | 正面线阵相机 测速/(m·s-1) |
|---|---|---|
| 1 | 277.55 | 283.33 |
| 2 | 283.33 | 289.36 |
| 3 | 295.65 | 302.22 |
| 4 | 277.55 | 285.43 |
表3 两台线阵相机速度数据处理结果
Table 3 The results of speed data processing of two line array cameras
| 发射次数 | 左侧线阵相机 测速/(m·s-1) | 正面线阵相机 测速/(m·s-1) |
|---|---|---|
| 1 | 277.55 | 283.33 |
| 2 | 283.33 | 289.36 |
| 3 | 295.65 | 302.22 |
| 4 | 277.55 | 285.43 |
| 发射 次数 | 弹重/ g | 装药 量/g | 线阵相机 测速/ (m·s-1) | 高速相机 测速/ (m·s-1) | 误差 |
|---|---|---|---|---|---|
| 1 | 106.1 | 7.2 | 277.55 | 275.13 | 0.0088 |
| 2 | 104.6 | 7.2 | 283.33 | 285.63 | 0.0081 |
| 3 | 105.3 | 7.2 | 295.65 | 297.71 | 0.0069 |
| 4 | 104.1 | 6.5 | 277.55 | 277.01 | 0.0019 |
表4 线阵相机与高速相机速度处理结果
Table 4 Speed processing results of line array camera and high-speed camera
| 发射 次数 | 弹重/ g | 装药 量/g | 线阵相机 测速/ (m·s-1) | 高速相机 测速/ (m·s-1) | 误差 |
|---|---|---|---|---|---|
| 1 | 106.1 | 7.2 | 277.55 | 275.13 | 0.0088 |
| 2 | 104.6 | 7.2 | 283.33 | 285.63 | 0.0081 |
| 3 | 105.3 | 7.2 | 295.65 | 297.71 | 0.0069 |
| 4 | 104.1 | 6.5 | 277.55 | 277.01 | 0.0019 |
| 发射次数 | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|
| 1 | 34.51 | |
| 2 | 14.65 | |
| 3 | 2.44 | |
| 4 | 19.65 | 41.10 |
| 5 | 36.10 | 39.19 |
| 6 | 39.19 | 3.18 |
| 7 | 1.17 | 34.91 |
表5 姿态角数据处理结果
Table 5 Attitude angle data processing results
| 发射次数 | 俯仰角/(°) | 偏航角/(°) |
|---|---|---|
| 1 | 34.51 | |
| 2 | 14.65 | |
| 3 | 2.44 | |
| 4 | 19.65 | 41.10 |
| 5 | 36.10 | 39.19 |
| 6 | 39.19 | 3.18 |
| 7 | 1.17 | 34.91 |
| 发射次数 | 射弹速度/(m·s-1) | 空泡过靶时间/ms |
|---|---|---|
| 1 | 283.33 | 13.42 |
| 2 | 309.09 | 11.67 |
| 3 | 289.36 | 12.12 |
| 4 | 277.55 | 13.07 |
| 5 | 283.33 | 11.16 |
| 6 | 295.65 | 12.34 |
| 7 | 277.55 | 10.64 |
表6 不同速度下超空泡的过靶时间
Table 6 Time for supercavitation crossinga target at different speeds
| 发射次数 | 射弹速度/(m·s-1) | 空泡过靶时间/ms |
|---|---|---|
| 1 | 283.33 | 13.42 |
| 2 | 309.09 | 11.67 |
| 3 | 289.36 | 12.12 |
| 4 | 277.55 | 13.07 |
| 5 | 283.33 | 11.16 |
| 6 | 295.65 | 12.34 |
| 7 | 277.55 | 10.64 |
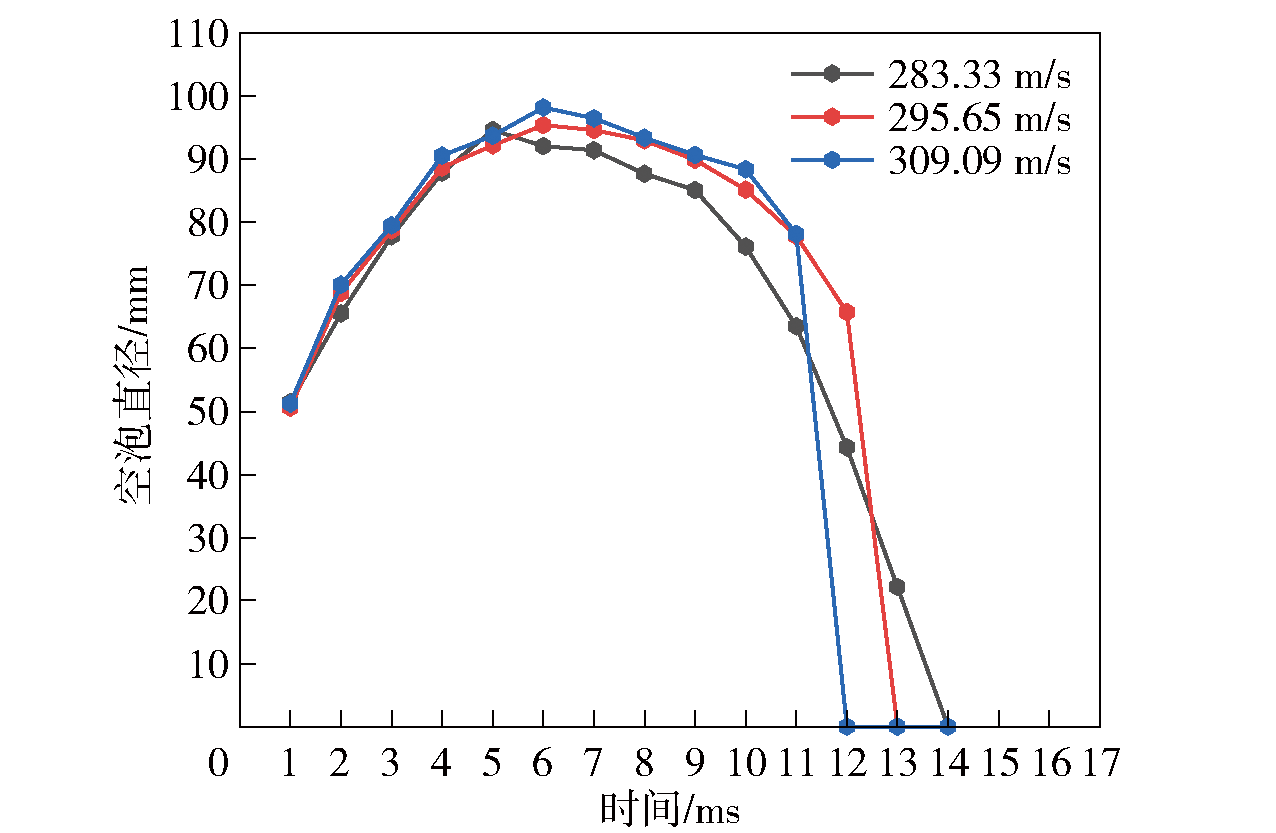
图17 射弹在不同速度下超空泡直径变化
Fig.17 Variation of supercavitation diameter of projectile at different speeds
| [1] |
侯宇, 黄振贵, 郭则庆, 等. 超空泡射弹小入水角高速斜入水实验研究[J]. 兵工学报, 2020, 41(2): 332-341.
doi: 10.3969/j.issn.1000-1093.2020.02.015 |
|
doi: 10.3969/j.issn.1000-1093.2020.02.015 |
|
| [2] |
|
| [3] |
|
| [4] |
张伟, 郭子涛, 肖新科, 等. 弹体高速入水特性实验研究[J]. 爆炸与冲击, 2011, 31(6):579-584.
|
|
|
|
| [5] |
|
| [6] |
孟炳全, 蔡荣立, 谭林秋. 线阵CCD精度靶图像触发算法设计[J]. 计算机测量与控制, 2019, 27(1): 245-249.
|
|
|
|
| [7] |
|
| [8] |
萧云峰, 杨丹蕾, 王劲松, 等. 光幕靶弹着点坐标测量方法[J]. 长春理工大学学报(自然科学版), 2018, 41(2): 72-75.
|
|
|
|
| [9] |
|
| [10] |
陈诚, 袁绪龙, 党建军, 等. 超空泡航行器20°角倾斜入水冲击载荷特性实验研究[J]. 兵工学报, 2018, 39(6): 1159-1164.
doi: 10.3969/j.issn.1000-1093.2018.06.016 |
|
doi: 10.3969/j.issn.1000-1093.2018.06.016 |
|
| [11] |
黄振贵, 罗驭川, 陈志华, 等. 凹头射弹垂直入水仿真研究[J]. 兵工学报, 2020, 41(增刊1): 128-134.
|
|
|
|
| [12] |
刘嵘侃, 邢德智, 唐昭焕, 等. 低噪声CMOS图像传感器技术研究综述[J]. 半导体光电, 2020, 41(6): 768-773.
|
|
|
|
| [13] |
罗红娥, 陈平, 顾金良, 等. 线阵CCD立靶系统全视场测量误差分析[J]. 光学技术, 2009, 35(3): 391-393,398.
|
|
|
|
| [14] |
王云, 袁绪龙, 吕策. 弹体高速入水弯曲弹道实验研究[J]. 兵工学报, 2014, 35(12): 1998-2002.
doi: 10.3969/j.issn.1000-1093.2014.12.010 |
|
doi: 10.3969/j.issn.1000-1093.2014.12.010 |
|
| [15] |
施红辉, 胡青青, 陈波, 等. 钝体倾斜和垂直冲击入水时引起的超空泡流动特性实验研究[J]. 爆炸与冲击, 2015, 35(5): 617-624.
|
|
|
|
| [16] |
|
| [17] |
王泽民, 高俊钗, 雷志勇, 等. CCD交汇测量系统布站方式的精度分析[J]. 山西电子技术, 2006(5): 38-40.
|
|
|
|
| [18] |
雷志勇, 李翰山. 线阵CCD测量高速射弹图像信息处理研究[J]. 半导体光电, 2009, 30(5): 751-754.
|
|
|
|
| [19] |
高俊钗, 雷志勇, 王泽民. 高精度测量的相机标定[J]. 电光与控制, 2011, 18(2): 93-96.
|
|
|
|
| [20] |
张迎. 基于CMOS线阵相机的立靶密集度测试技术研究[D]. 南京: 南京理工大学, 2020.
|
|
|
| [1] | 郭开心, 黄闯, 颜凤, 古鉴霄, 李代金. 衡重参数对超空泡航行器振荡特性的影响[J]. 兵工学报, 2024, 45(8): 2667-2677. |
| [2] | 许云涛, 檀大林, 杨超, 戴玉婷, 王震霄, 周鹏. 平头射弹前体参数对弹道稳定性及射程的影响[J]. 兵工学报, 2024, 45(6): 1933-1941. |
| [3] | 张亮, 胡常莉, 吴小安. 超空泡航行体锥段结构对其尾拍运动影响的数值研究[J]. 兵工学报, 2024, 45(3): 828-836. |
| [4] | 刘如石, 郭则庆, 张辉. 尾部形状对超空泡射弹尾拍运动影响的数值研究[J]. 兵工学报, 2023, 44(10): 2984-2994. |
| [5] | 古鉴霄, 党建军, 黄闯, 李代金, 刘富强. 衡重参数对超空泡射弹有效射程的影响[J]. 兵工学报, 2022, 43(6): 1376-1386. |
| [6] | 宋雨, 王亚林, 杜博军, 王军, 董兴法. 基于改进最大类间方差法的靶板重孔检测[J]. 兵工学报, 2022, 43(4): 924-930. |
| [7] | 姜雨彤, 宋海平, 王光辉. 基于质量评价最优的无人机航拍图像去雾方法[J]. 兵工学报, 2022, 43(1): 148-158. |
| [8] | 侯东伯, 王聪, 夏维学, 李宜果, 赵静. 弹性尾缘对超空泡航行体空泡形态与压力脉动特性影响的水洞试验研究[J]. 兵工学报, 2020, 41(3): 534-541. |
| [9] | 侯宇, 黄振贵, 郭则庆, 陈志华, 刘如石, 罗驭川. 超空泡射弹小入水角高速斜入水试验研究[J]. 兵工学报, 2020, 41(2): 332-341. |
| [10] | 张成举, 王聪, 曹伟, 王金强. 基于无迹卡尔曼滤波的超空泡航行体最优控制研究[J]. 兵工学报, 2019, 40(6): 1235-1243. |
| [11] | 覃若琳, 蒋晓刚, 金良安, 高可心. 基于Hough变换的水中气泡群特征参数提取方法研究[J]. 兵工学报, 2019, 40(12): 2504-2512. |
| [12] | 时素果, 王亚东, 杨晓光, 刘乐华. 超空泡航行体运动过程流体动力特性试验研究[J]. 兵工学报, 2019, 40(11): 2266-2271. |
| [13] | 王威, 王聪, 李聪慧, 宋武超. 航行体沾湿区域对空泡尾流结构的影响[J]. 兵工学报, 2019, 40(10): 2111-2118. |
| [14] | 王威, 王聪, 杜严锋, 李聪慧. 周期性阵风流作用下通气超空泡的仿真研究[J]. 兵工学报, 2018, 39(9): 1772-1779. |
| [15] | 陈诚, 袁绪龙, 邢晓琳, 党建军. 预置舵角下超空泡航行体倾斜入水弹道特性研究[J]. 兵工学报, 2018, 39(9): 1780-1785. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4