
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (3): 895-909.doi: 10.12382/bgxb.2021.0796
李姗姗1,2( ), 王洪波1,3(), 陈建宇1,2(), 张兴超1,2(), 田俊杰1,2(), 牛建业1,2()
), 王洪波1,3(), 陈建宇1,2(), 张兴超1,2(), 田俊杰1,2(), 牛建业1,2()
收稿日期:2021-11-24
上线日期:2022-07-01
作者简介:李姗姗(1990—),女,博士研究生,研究方向为并联机构理论及其应用。E-mail: lishanshan1330704@163.com;
王洪波(1956—),男,教授,博士生导师,研究方向为机器人技术与应用。E-mail:wanghongbo@fudan.edu.cn;
陈建宇(1994—),男,硕士研究生,研究方向为并联机构理论及其应用。E-mail:15133518326@163.com;
张兴超(1995—),男,博士研究生,研究方向为并联机构理论及其应用。E-mail:1223806318@qq.com;
田俊杰(1992—),男,博士研究生,研究方向为康复护理机器人。E-mail: tjjie123@163.com
基金资助:
LI Shanshan1,2(), WANG Hongbo1,3(), CHEN Jianyu1,2(), ZHANG Xingchao1,2(), TIAN Junjie1,2(), NIU Jianye1,2()
Received:2021-11-24
Online:2022-07-01
摘要:
在多关节步行机器人控制策略中,全部采用中央模式(CPG)网络进行控制的方法具有参数繁多、网络结构复杂的特点;机器人的工作环境通常多变且复杂,对机器人的灵活性和抗干扰能力提出了更高的要求,故仅采用单一的控制模式很难满足上述需求。针对上述问题,在机器人控制上把基于CPG的控制方法和基于虚拟模型的控制方法进行综合,对单腿为3-UPS机构的四足并联军用机器人设计了一种新型步态控制算法,用CPG完成机器人的基础步态,完成输入输出之间的非线性振荡器网络模型的搭建,并将模型的输出与关节电机的驱动力矩构成映射关系;再用虚拟模型生成行走时保持机器人平稳姿态所需要的足端虚拟力,并将足端虚拟力映射为关节驱动力矩。通过V-REP与MATLAB软件对该步态控制算法进行联合仿真实验。仿真结果表明:所提出的步态控制算法有效;新算法的优势在于简化控制网络的同时还能保证机器人在行走过程中拥有较强的灵活性和抗干扰能力,这种新型控制模式为四足并联军用机器人的步态控制提供了新的思路与方法。
李姗姗, 王洪波, 陈建宇, 张兴超, 田俊杰, 牛建业. 新型四足并联军用机器人步态控制算法及仿真[J]. 兵工学报, 2023, 44(3): 895-909.
LI Shanshan, WANG Hongbo, CHEN Jianyu, ZHANG Xingchao, TIAN Junjie, NIU Jianye. Gait Control Algorithm and Simulation of New Parallel Quadruped Military Robot[J]. Acta Armamentarii, 2023, 44(3): 895-909.

图1 整机机构
Fig. 1 Whole robot
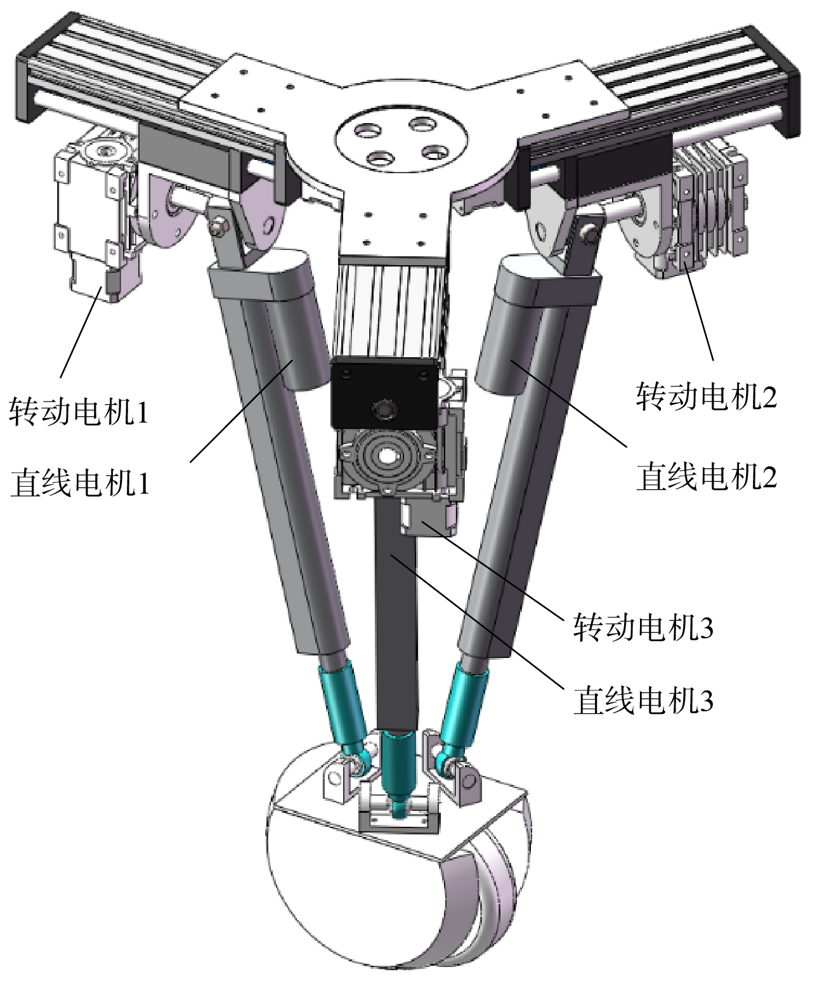
图2 单腿机构
Fig. 2 One leg mechanism
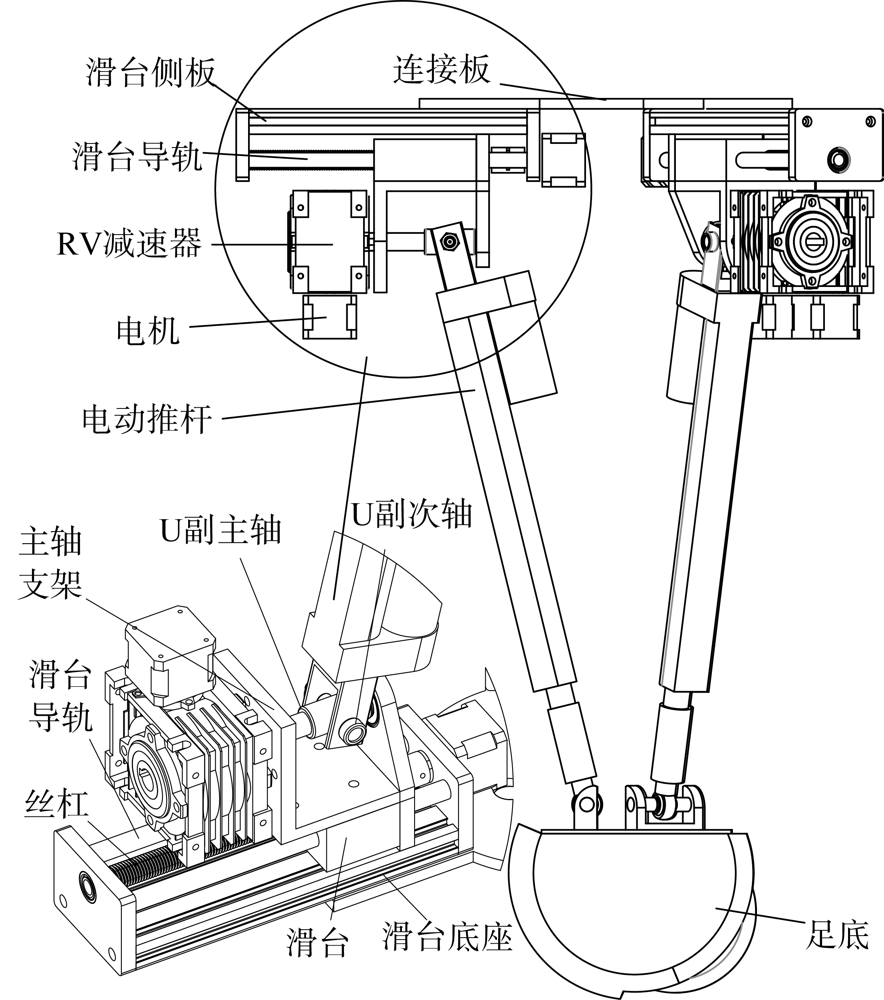
图3 机器人单腿的结构图
Fig. 3 Diagram of a single leg of the robot
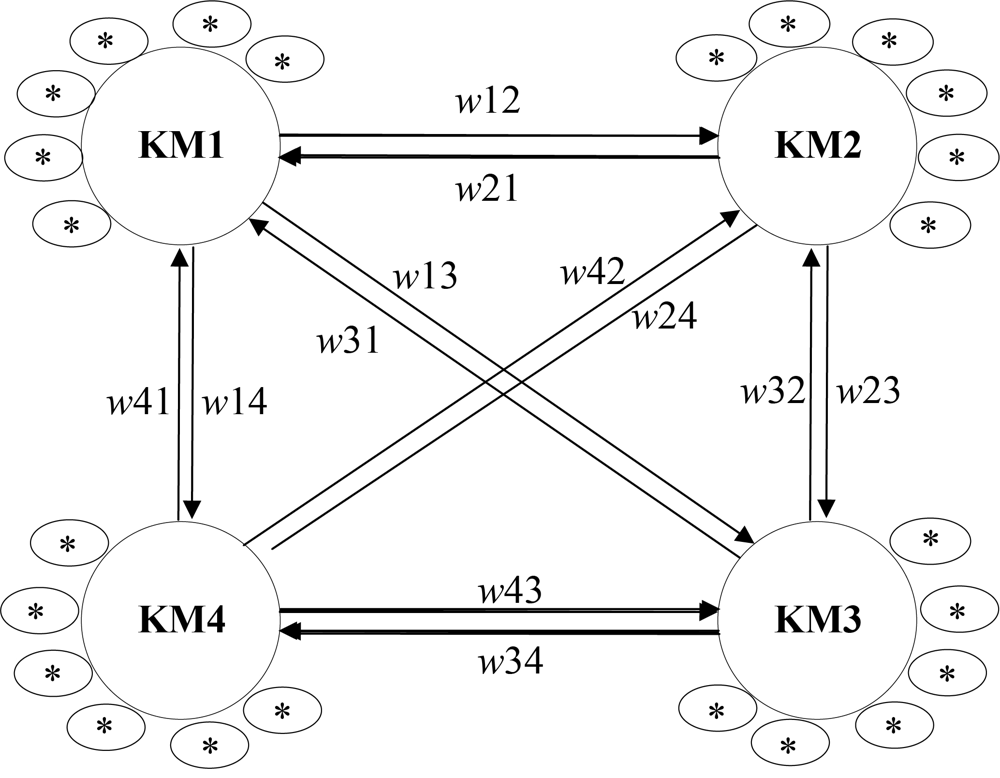
图4 非线性振子耦合网络
Fig. 4 Coupled nonlinear oscillator network
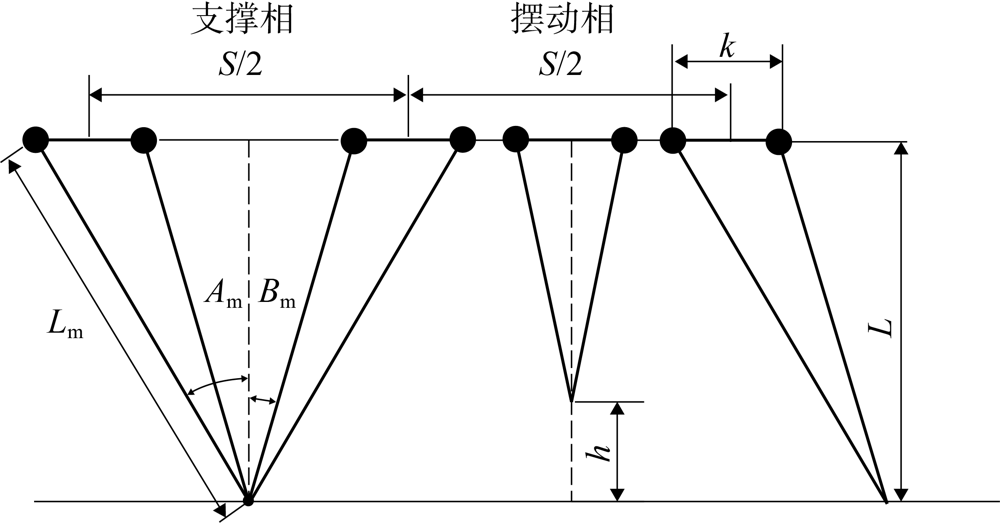
图5 单腿周期行走图
Fig. 5 Diagram of periodic walking of a single leg
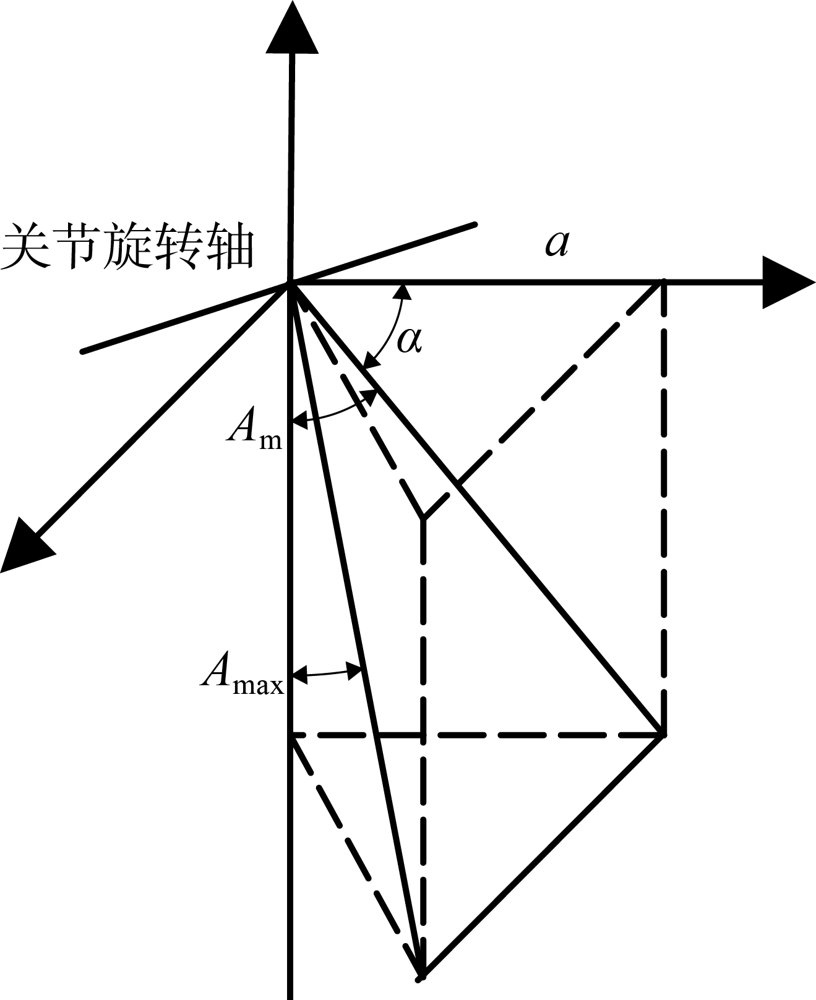
图6 实际关节角度图
Fig. 6 Diagram of actual joint angle
| 步长/mm | Amax/(°) | Bmax/(°) | Ls/mm | Lsm/mm |
|---|---|---|---|---|
| 400 | 55.73 | 47.17 | 1 014.35 | 1 000.45 |
| 420 | 56.00 | 47.51 | 1 015.20 | 1 000.61 |
| 440 | 56.27 | 47.84 | 1 016.07 | 1 000.80 |
| 460 | 56.53 | 48.18 | 1 016.97 | 1 001.01 |
| 480 | 56.80 | 48.51 | 1 017.89 | 1 001.25 |
| 500 | 57.06 | 48.84 | 1 018.84 | 1 001.51 |
| 520 | 57.32 | 49.17 | 1 019.80 | 1 001.80 |
| 540 | 57.57 | 49.49 | 1 020.80 | 1 002.11 |
| 560 | 57.83 | 49.81 | 1 021.81 | 1 002.45 |
| 580 | 58.08 | 50.13 | 1 022.85 | 1 002.81 |
| 600 | 58.33 | 50.45 | 1 023.91 | 1 003.19 |
| 620 | 58.58 | 50.76 | 1 025.00 | 1 003.61 |
表1 步长与关节摆角关系
Table 1 Relationship between step size and joint swing angle
| 步长/mm | Amax/(°) | Bmax/(°) | Ls/mm | Lsm/mm |
|---|---|---|---|---|
| 400 | 55.73 | 47.17 | 1 014.35 | 1 000.45 |
| 420 | 56.00 | 47.51 | 1 015.20 | 1 000.61 |
| 440 | 56.27 | 47.84 | 1 016.07 | 1 000.80 |
| 460 | 56.53 | 48.18 | 1 016.97 | 1 001.01 |
| 480 | 56.80 | 48.51 | 1 017.89 | 1 001.25 |
| 500 | 57.06 | 48.84 | 1 018.84 | 1 001.51 |
| 520 | 57.32 | 49.17 | 1 019.80 | 1 001.80 |
| 540 | 57.57 | 49.49 | 1 020.80 | 1 002.11 |
| 560 | 57.83 | 49.81 | 1 021.81 | 1 002.45 |
| 580 | 58.08 | 50.13 | 1 022.85 | 1 002.81 |
| 600 | 58.33 | 50.45 | 1 023.91 | 1 003.19 |
| 620 | 58.58 | 50.76 | 1 025.00 | 1 003.61 |
| h/mm | L/mm | Lmin/mm |
|---|---|---|
| 200 | 1 000 | 800 |
| 204 | 1 020 | 816 |
| 208 | 1 040 | 832 |
| 212 | 1 060 | 848 |
| 216 | 1 080 | 864 |
| 220 | 1 100 | 880 |
表2 抬腿高度与伸缩杆长度关系
Table 2 Relationship between leg height and telescopic rod length
| h/mm | L/mm | Lmin/mm |
|---|---|---|
| 200 | 1 000 | 800 |
| 204 | 1 020 | 816 |
| 208 | 1 040 | 832 |
| 212 | 1 060 | 848 |
| 216 | 1 080 | 864 |
| 220 | 1 100 | 880 |
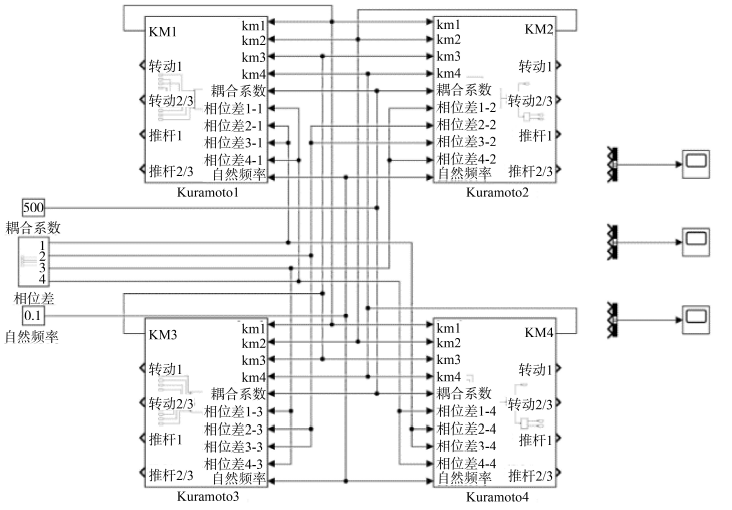
图7 非线性振子耦合网络图
Fig. 7 Diagram of coupled nonlinear oscillator network
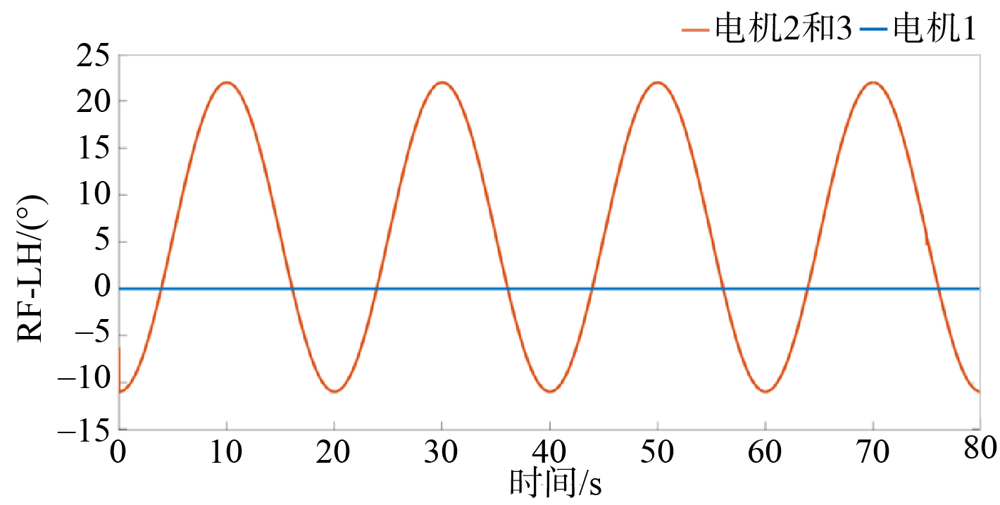
图8 trot步态转动电机输出曲线图
Fig. 8 Output curve of the trot motor
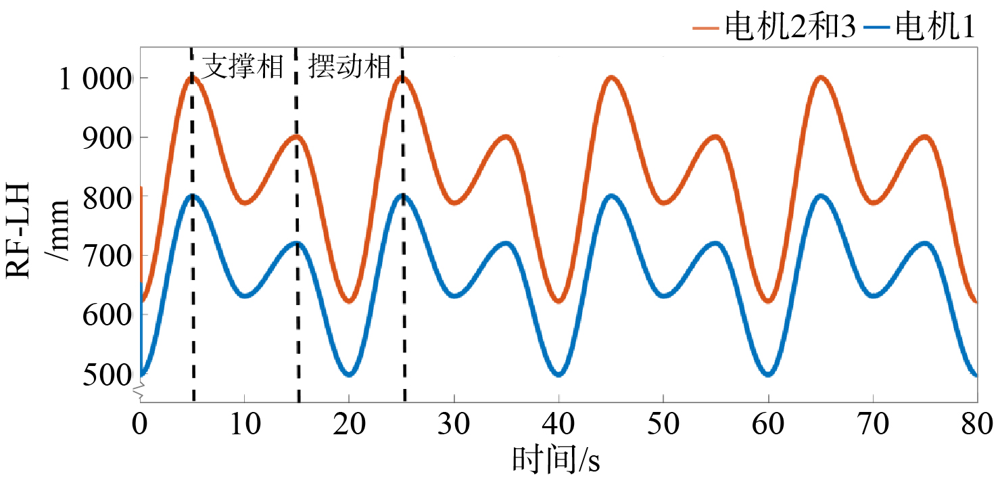
图9 Trot步态直线电机输出曲线图
Fig. 9 Output curve of the trot linear motor
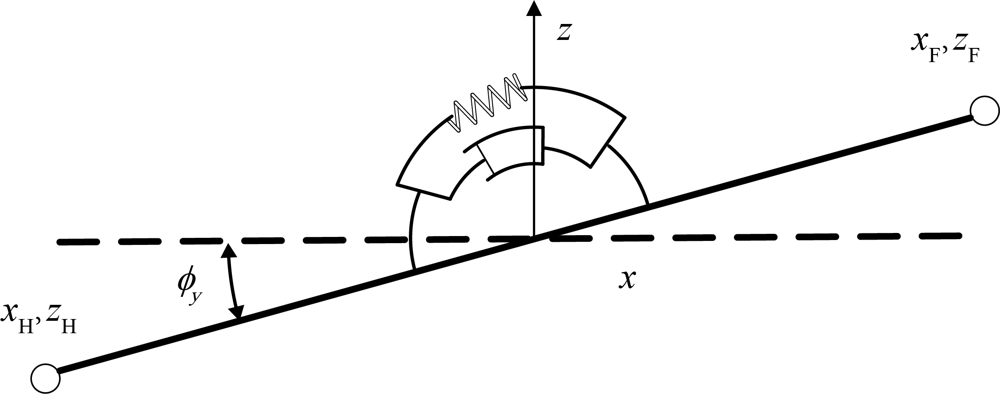
图10 机体俯仰角调整图
Fig. 10 Diagram of pitch angle adjustment of the body
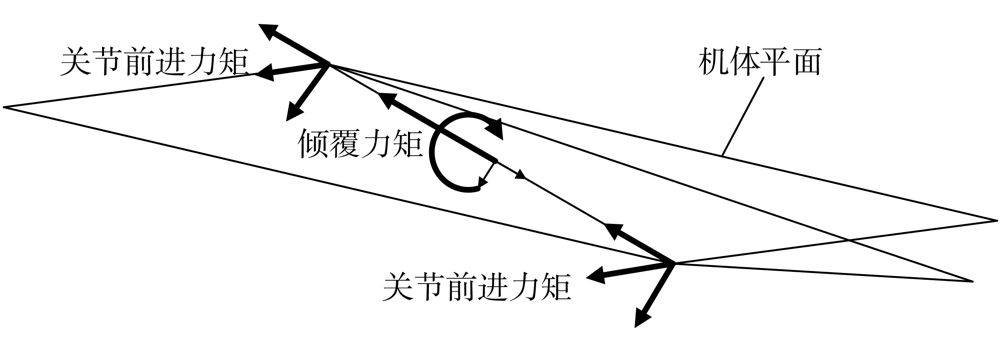
图11 倾覆力矩图
Fig. 11 Overturning moment diagram
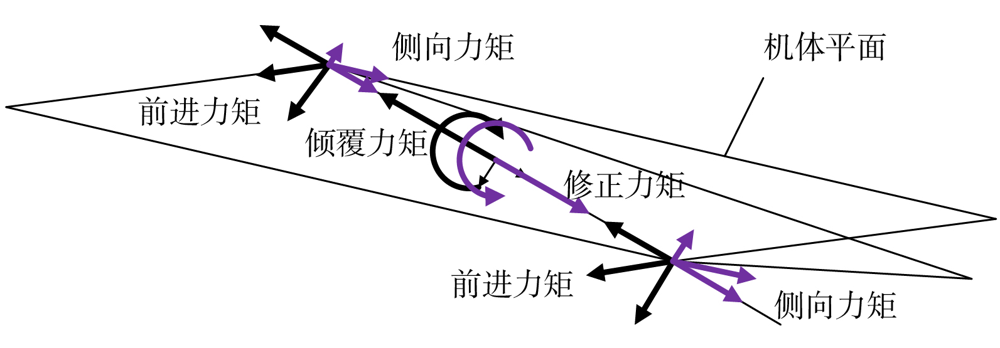
图12 修正力矩图
Fig. 12 Corrected moment diagram
图13 修正力矩图
Fig. 13 Corrected moment diagram
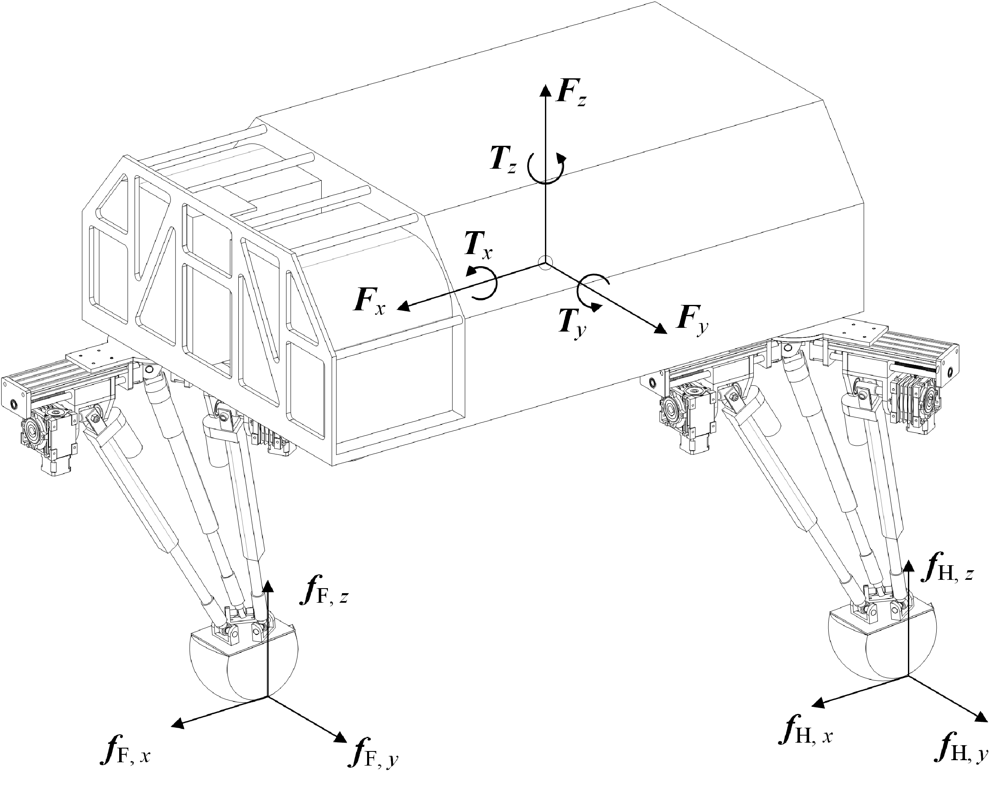
图14 非线性振子耦合网络图
Fig. 14 Diagram of coupled nonlinear oscillator network
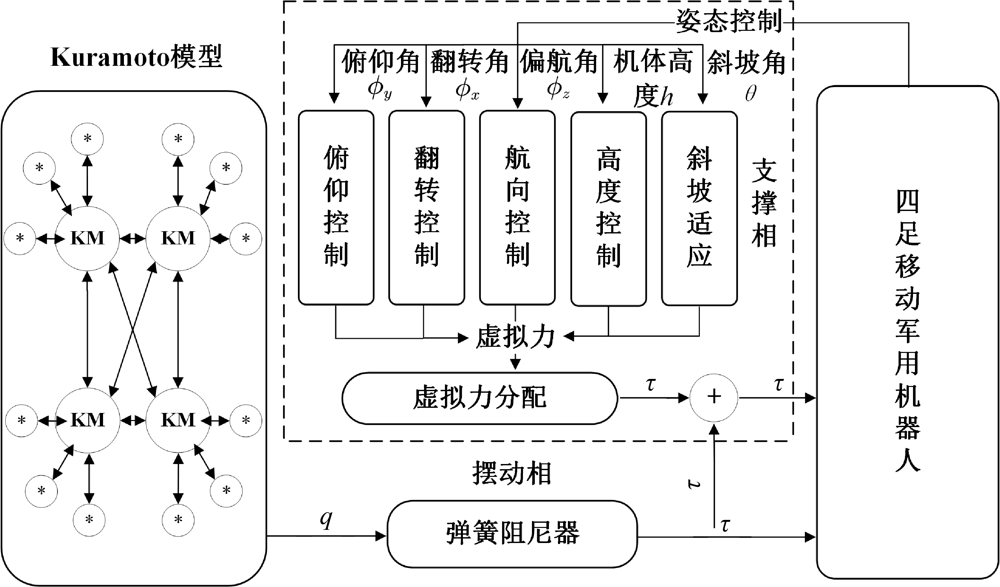
图15 步态规划整体框图
Fig. 15 Overall block diagram of gait planning

图16 最终模型图
Fig. 16 Final model drawing
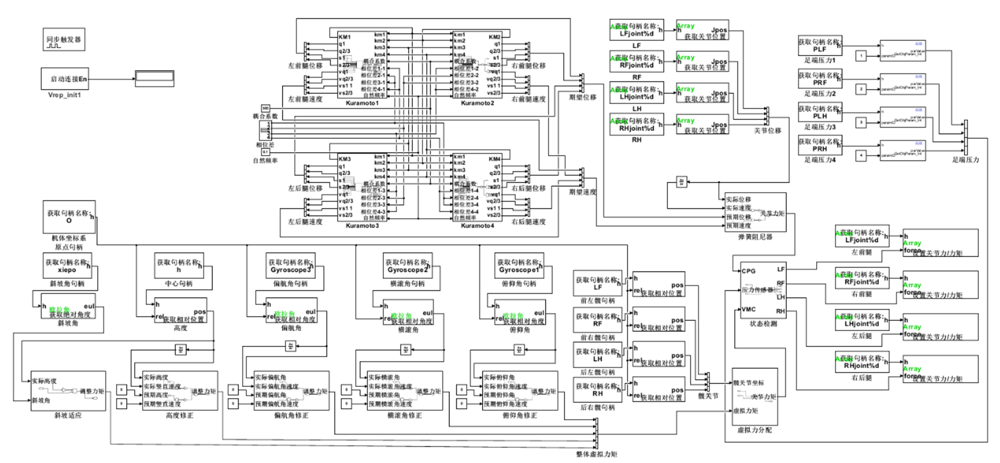
图17 步态控制模型
Fig. 17 Gait control model
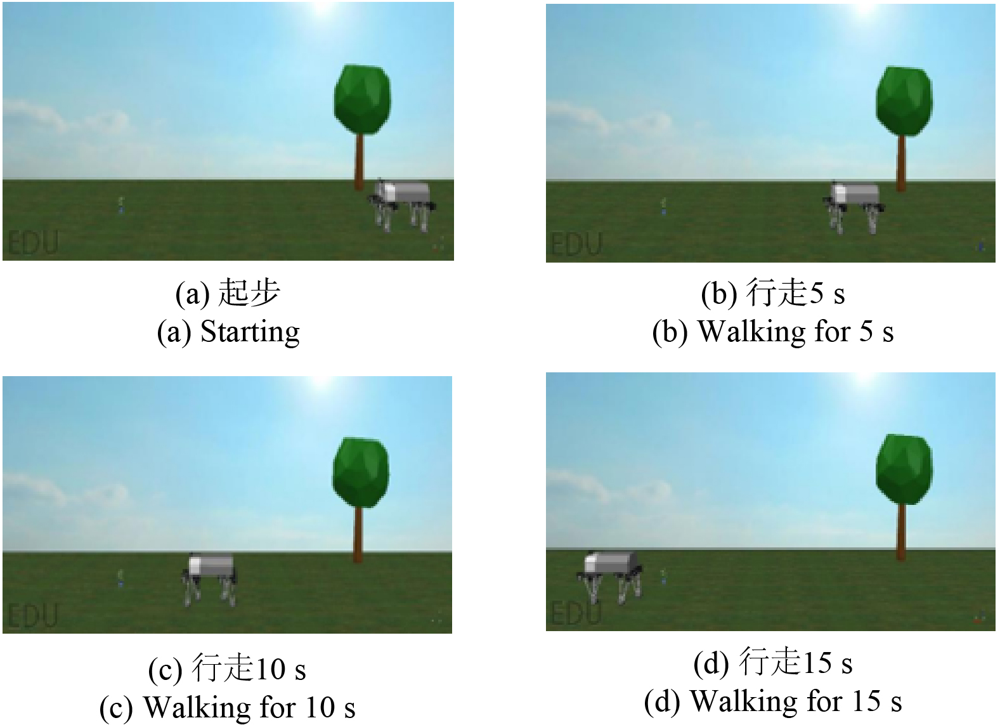
图18 平地实验
Fig. 18 Ground experiment
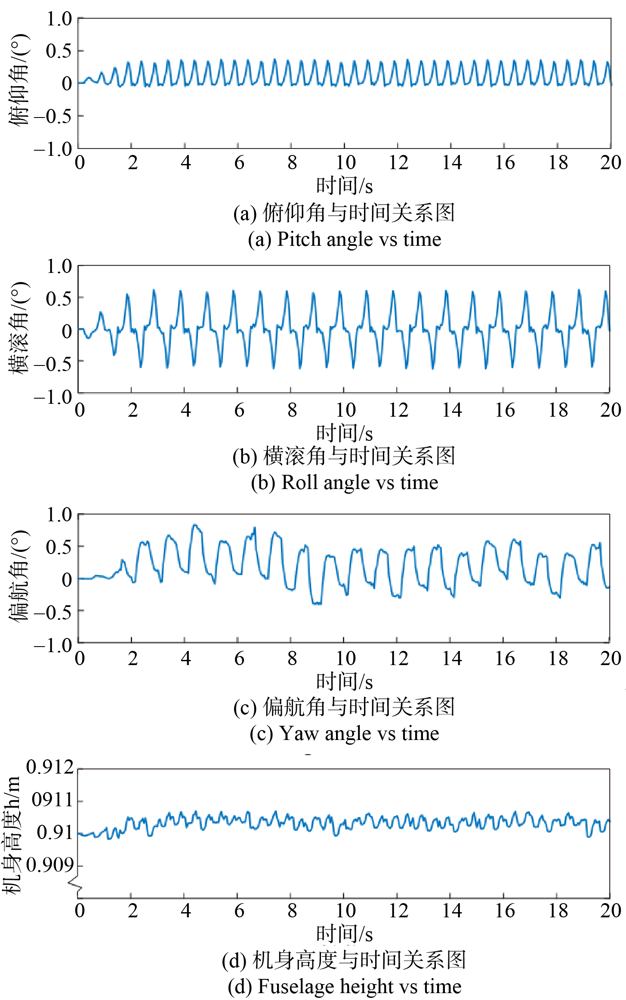
图19 机体姿态与高度
Fig. 19 Body attitude and altitude
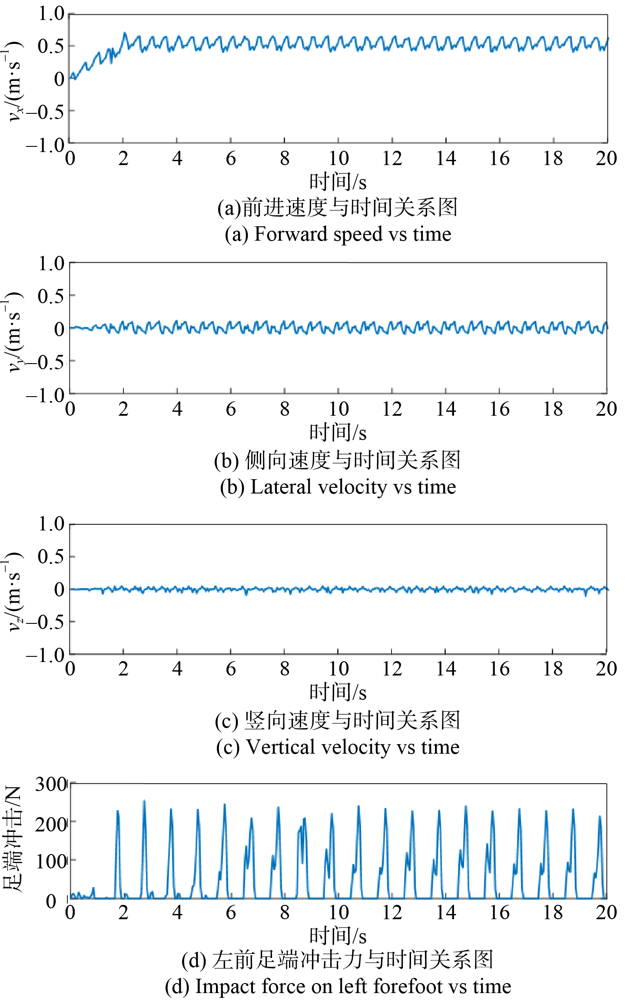
图20 机体速度与足端力
Fig. 20 Body speed and foot force
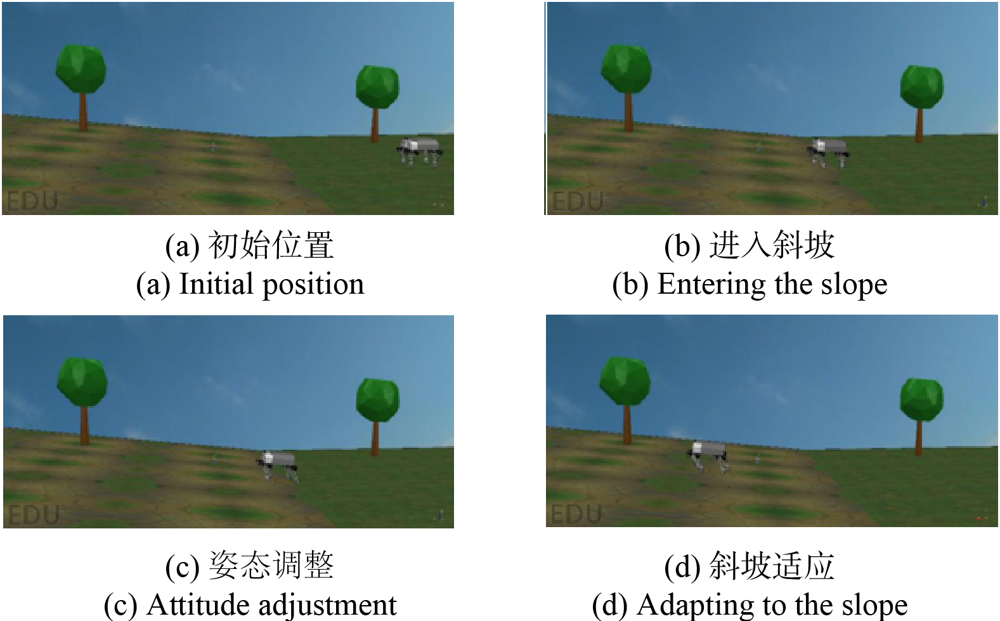
图21 斜坡实验
Fig. 21 Slope experiment
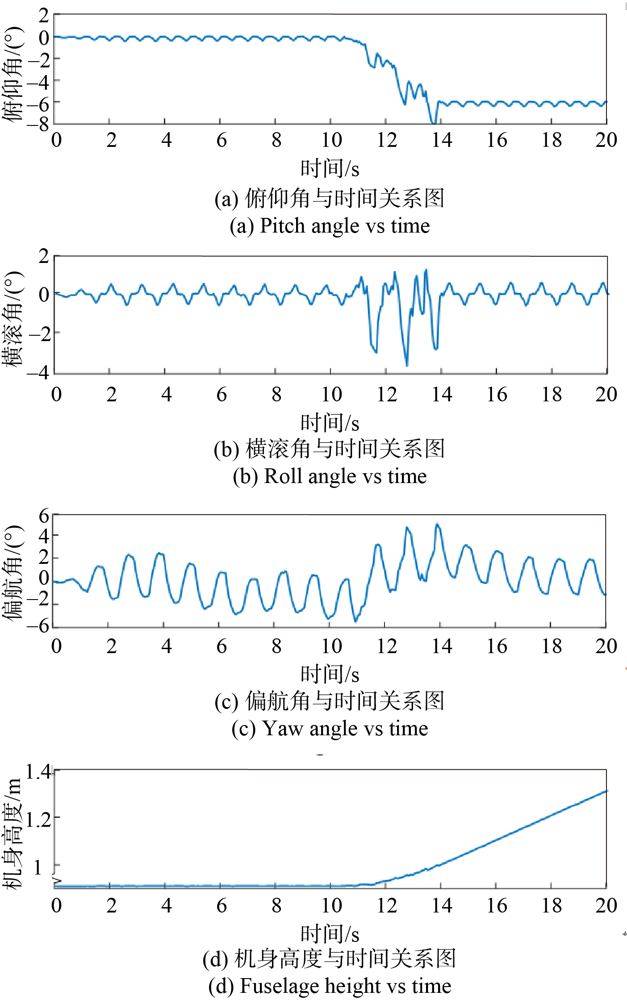
图22 机体姿态与高度
Fig. 22 Body attitude and altitude
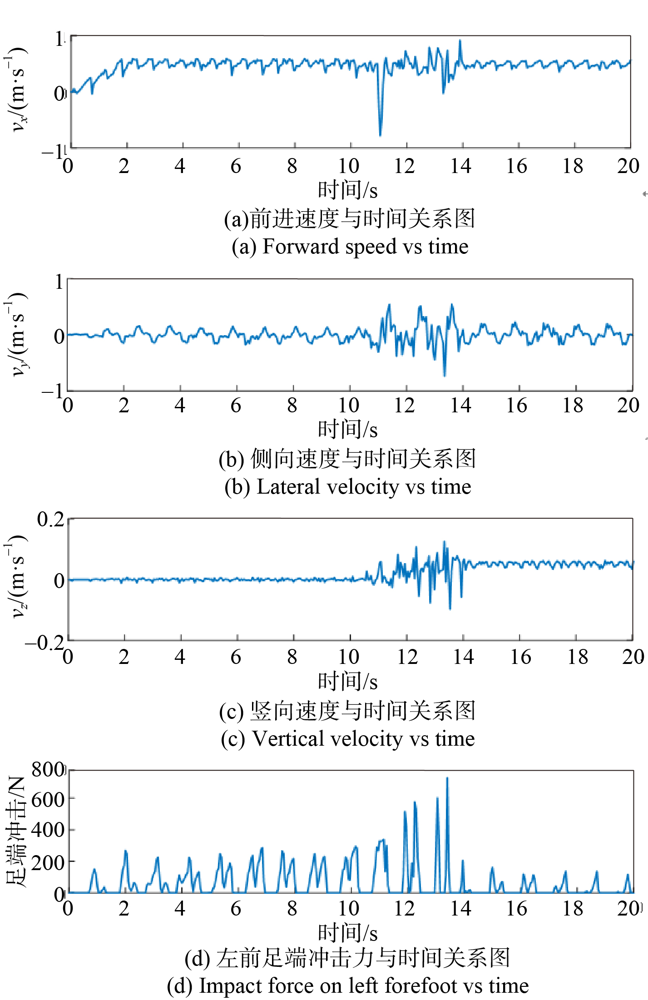
图23 机体速度与足端力
Fig. 23 Body speed and foot force
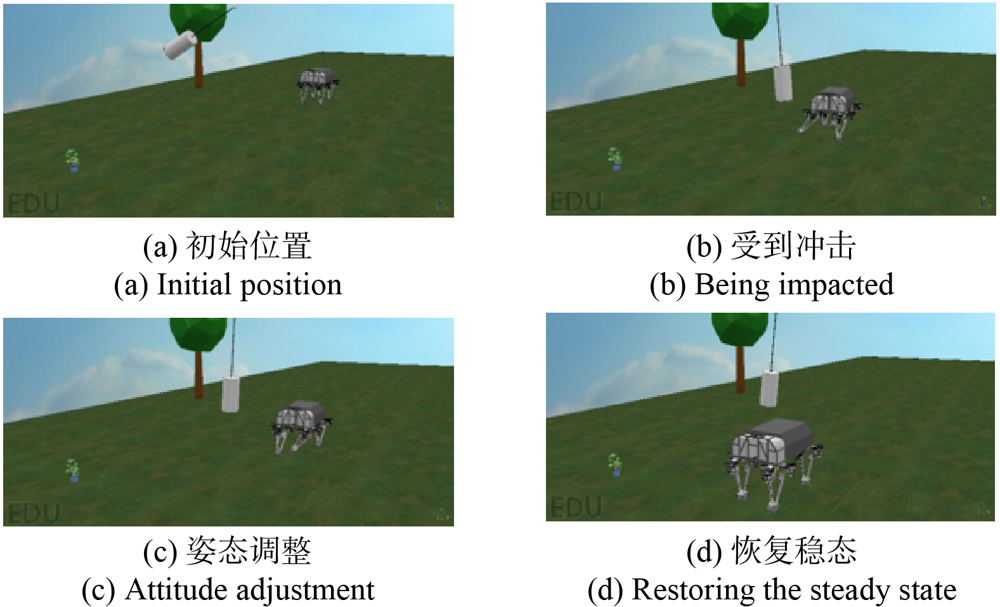
图24 冲击实验
Fig. 24 Impact test
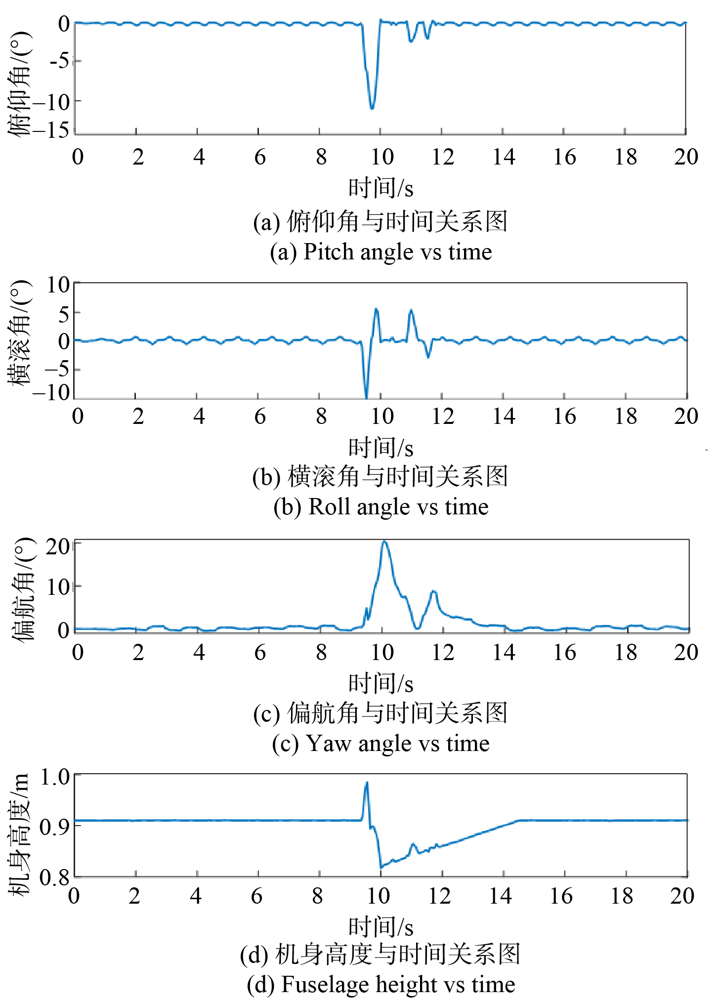
图25 机体姿态与高度
Fig. 25 Body attitude and altitude
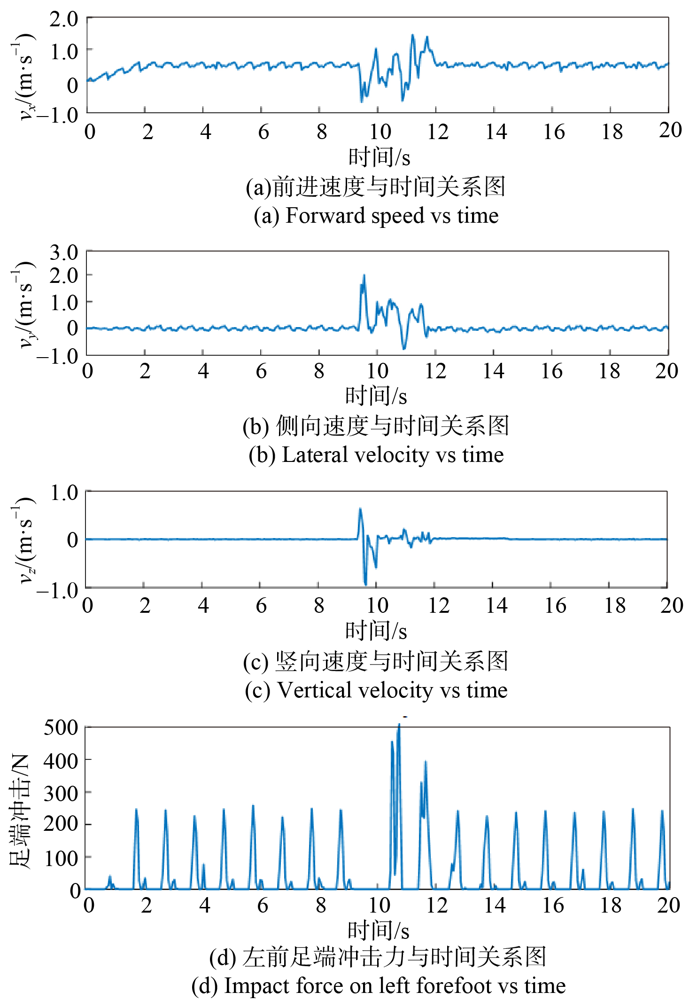
图26 机体速度与足端力
Fig. 26 Body speed and foot force
| [1] |
孙军权. 自适应行星轮式履带机器人的研究[D]. 北京: 北京交通大学, 2019:58-62.
|
|
|
|
| [2] |
曾凡芹. Kuramoto模型的同步与渐近行为[D]. 哈尔滨: 哈尔滨工业大学, 2017:49-53.
|
|
|
|
| [3] |
段宝国, 王新晴, 许鸿辉. CPG四足机器人典型步态生成方法的研究[J]. 电子技术, 2020, 49(5):20-23.
|
|
|
|
| [4] |
陈建宇. 四足机器人参数辨识及步态规划研究[D]. 秦皇岛: 燕山大学, 2020:60-93.
|
|
|
|
| [5] |
陈久朋. 四足机器人步态及运动控制研究[D]. 昆明: 昆明理工大学, 2021:23-52.
|
|
|
|
| [6] |
胡鑫. 爆发式同步的广义Kuramoto模型的解析求解[D]. 上海: 华东师范大学, 2014:49-57.
|
|
|
|
| [7] |
牛建业, 王洪波, 史洪敏. 变自由度轮足复合机器人轨迹规划验证及步态研究[J]. 农业工程学报, 2017, 33(23):38-47.
|
|
|
|
| [8] |
doi: 10.1038/s41598-017-00348-9 pmid: 28325917 |
| [9] |
|
| [10] |
曲梦可, 王洪波, 荣誉. 军用轮、腿混合四足机器人设计[J]. 兵工学报, 2018, 39(4):787-797.
doi: 10.3969/j.issn.1000-1093.2018.04.019 |
|
|
|
| [11] |
|
| [12] |
牛建业. 基于串并混联机构的四轮足步行机器人研究[D]. 秦皇岛: 燕山大学, 2018:78-102.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
李鑫. 基于虚拟模型和阻抗控制的四足液压驱动机器人行走研究[D]. 哈尔滨: 哈尔滨工业大学, 2018:71-75.
|
|
|
|
| [16] |
陈佳品, 程君实, 席裕庚. 基于虚拟模型的四足机器人直觉控制[J]. 上海交通大学学报, 2002(8):1150-1154.
|
|
|
|
| [17] |
doi: 10.1177/02783640122067309 URL |
| [18] |
孟健. 复杂地形环境四足机器人运动控制方法研究与实现[D]. 济南: 山东大学, 2015:91-94.
|
|
|
|
| [19] |
段宝国, 王新晴, 许鸿辉. 四足机器人多障碍地形通行能力研究[J]. 武汉理工大学学报, 2021, 43(3):79-86.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
乐斌, 曾兴斌. V-REP机器人仿真远程控制方法研究[J]. 工业控制计算机, 2018, 31(9):41-43.
|
|
|
| [1] | 张云, 郭振武, 陈迪剑, 王斌锐. 基于Kimura振荡器和虚拟模型的气动肌肉四足机器人步态控制[J]. 兵工学报, 2018, 39(7): 1411-1418. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4