
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240435-.doi: 10.12382/bgxb.2024.0435
XIAN Sujie, WANG Kang, ZENG Xin, SONG Jie*( ), WU Zhilin**()
), WU Zhilin**()
Received:2024-06-05
Online:2025-04-30
Contact:
SONG Jie, WU Zhilin
CLC Number:
XIAN Sujie, WANG Kang, ZENG Xin, SONG Jie, WU Zhilin. An Impact Angle and Field of View Constraints Guidance Law Based on Deep Reinforcement Learning[J]. Acta Armamentarii, 2025, 46(4): 240435-.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Engagement geometry
Fig.2 The estimated result of vT
Fig.3 Structural diagram of guidance law training algorithm

Fig.4 PPO-based guidance law training algorithm for impact angle control with FOV angle constraints
| 神经网络 | 结构 | 激活函数 |
|---|---|---|
| Actor | (2,64) | ReLU |
| (64,128) | ReLU | |
| (128,64) | ReLU | |
| (64,1),(64,1) | Tanh,Sigmoid | |
| Critic | (2,64) | ReLU |
| (64,256) | ReLU | |
| (256,64) | ReLU | |
| (64,32) | ReLU | |
| (32,16) | ReLU | |
| (16,1) | Linner |
Table 1 Neural network architecture
| 神经网络 | 结构 | 激活函数 |
|---|---|---|
| Actor | (2,64) | ReLU |
| (64,128) | ReLU | |
| (128,64) | ReLU | |
| (64,1),(64,1) | Tanh,Sigmoid | |
| Critic | (2,64) | ReLU |
| (64,256) | ReLU | |
| (256,64) | ReLU | |
| (64,32) | ReLU | |
| (32,16) | ReLU | |
| (16,1) | Linner |
| 参数 | 取值 |
|---|---|
| N | 3 |
| vM/(m·s-1) | 100 |
| vT/(m·s-1) | 10 |
| abn/(m· ) | 30 |
| 0.5eθ0 | |
| /(°) | 10 |
| q0/(°) | 0 |
| σM0/(°) | 15 |
| θM0/(°) | 15 |
| n | 32 |
| αϑ | 0.00001 |
| αφ | 0.0001 |
| k1 | 0.25 |
| γ | 0.95 |
| λGAE | 0.95 |
| ε | 0.2 |
| K | 10 |
| dt/s | 0.01 |
| Δt/s | 0.02 |
| 训练回合总数 | 2000 |
Table 2 Parameter settings
| 参数 | 取值 |
|---|---|
| N | 3 |
| vM/(m·s-1) | 100 |
| vT/(m·s-1) | 10 |
| abn/(m· ) | 30 |
| 0.5eθ0 | |
| /(°) | 10 |
| q0/(°) | 0 |
| σM0/(°) | 15 |
| θM0/(°) | 15 |
| n | 32 |
| αϑ | 0.00001 |
| αφ | 0.0001 |
| k1 | 0.25 |
| γ | 0.95 |
| λGAE | 0.95 |
| ε | 0.2 |
| K | 10 |
| dt/s | 0.01 |
| Δt/s | 0.02 |
| 训练回合总数 | 2000 |
Fig.5 Numerically simulated results for variousσlim
| σlim/(°) | σsat/(°) | 终端θM/(°) | 最大σM/° | dt |
|---|---|---|---|---|
| 15 | 14.0 | -29.98 | 15.00 | 78.52 |
| 30 | 28.5 | -29.84 | 28.18 | 120.34 |
| 45 | 43.5 | -30.00 | 41.86 | 163.13 |
| 无限制 | -30.45 | 61.01 | 174.77 |
Table 3 Simulated results under differentσlimconditions
| σlim/(°) | σsat/(°) | 终端θM/(°) | 最大σM/° | dt |
|---|---|---|---|---|
| 15 | 14.0 | -29.98 | 15.00 | 78.52 |
| 30 | 28.5 | -29.84 | 28.18 | 120.34 |
| 45 | 43.5 | -30.00 | 41.86 | 163.13 |
| 无限制 | -30.45 | 61.01 | 174.77 |

Fig.6 Numerically simulated results for various θexp
| θexp/(°) | 终端θM/(°) | 最大σM/(°) | dt |
|---|---|---|---|
| -30 | -29.84 | 28.18 | 120.34 |
| -45 | -44.87 | 28.42 | 147.76 |
| -60 | -59.91 | 28.60 | 174.48 |
| -75 | -74.53 | 28.69 | 200.26 |
Table 4 Simulation results under different θexp
| θexp/(°) | 终端θM/(°) | 最大σM/(°) | dt |
|---|---|---|---|
| -30 | -29.84 | 28.18 | 120.34 |
| -45 | -44.87 | 28.42 | 147.76 |
| -60 | -59.91 | 28.60 | 174.48 |
| -75 | -74.53 | 28.69 | 200.26 |
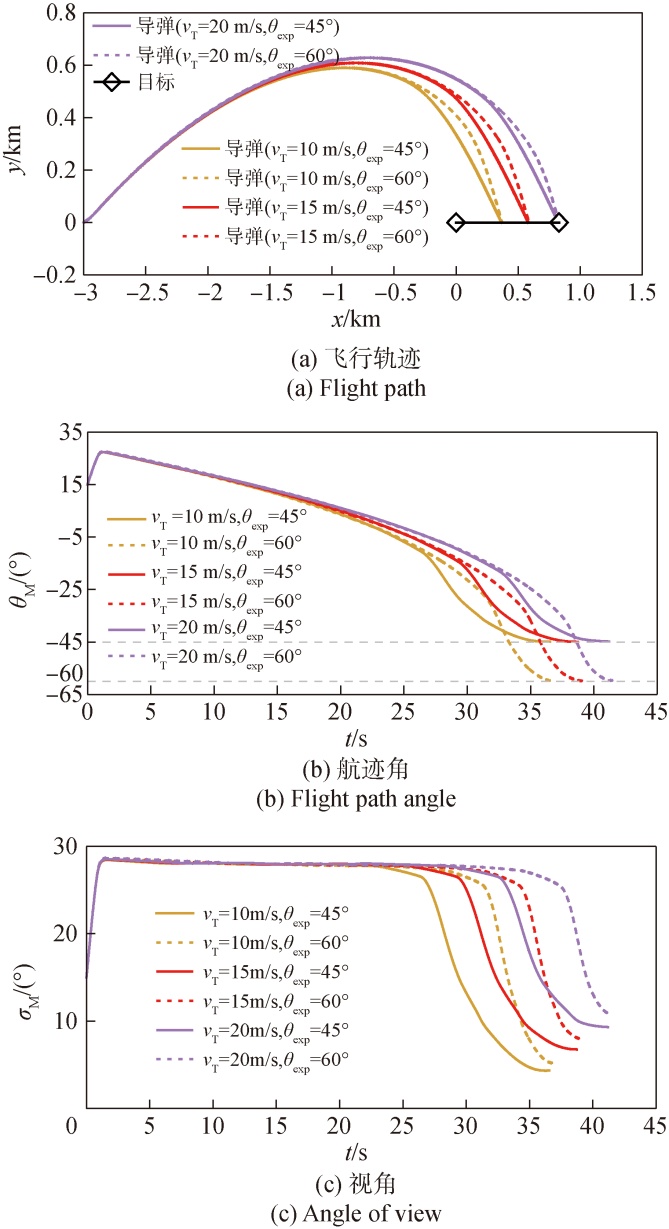
Fig.7 Numerically simulated results for variousvT

Fig.8 The capture regions of RLIACG,IACCG and D-RLIACG
| vM/(m·s-1) | RLIACG | IACCG | D-RLIACG |
|---|---|---|---|
| 100 | 88.89 | 68.15 | 65.56 |
| 150 | 71.85 | 38.15 | 57.78 |
| 200 | 47.04 | 21.11 | 39.63 |
Table 5 Capture rates of RLIACG,D-RLIACG and IACCG for variousvM %
| vM/(m·s-1) | RLIACG | IACCG | D-RLIACG |
|---|---|---|---|
| 100 | 88.89 | 68.15 | 65.56 |
| 150 | 71.85 | 38.15 | 57.78 |
| 200 | 47.04 | 21.11 | 39.63 |

Fig.9 Comparison of Monte Carlo simulations of RLIACG and IACCG
| 统计量 | 脱靶量/m | 落角误差/(°) | ||||
|---|---|---|---|---|---|---|
| RLIACG | IACCG | D-RLIACG | RLIACG | IACCG | D-RLIACG | |
| 均值 | 0.24 | 0.26 | 1.15 | 0.22 | 0.91 | 0.47 |
| 标准差 | 0.19 | 0.19 | 0.26 | 0.14 | 0.76 | 0.44 |
| 最大值 | 0.75 | 0.90 | 1.90 | 0.77 | 5.91 | 4.30 |
Table 6 Error distributions of RLIACG,IACCG and D-RLIACG
| 统计量 | 脱靶量/m | 落角误差/(°) | ||||
|---|---|---|---|---|---|---|
| RLIACG | IACCG | D-RLIACG | RLIACG | IACCG | D-RLIACG | |
| 均值 | 0.24 | 0.26 | 1.15 | 0.22 | 0.91 | 0.47 |
| 标准差 | 0.19 | 0.19 | 0.26 | 0.14 | 0.76 | 0.44 |
| 最大值 | 0.75 | 0.90 | 1.90 | 0.77 | 5.91 | 4.30 |
| 参数 | 数值 |
|---|---|
| Mα/s-2 | -423.6 |
| Mφ/s-1 | -0.07 |
| Mδ/s-2 | 331 |
| Zα/(m·s-2·rad-1) | -705 |
| Zδ/(m·s-2·rad-1) | -165 |
| KA/(rad·s·m-1) | 4.5×10-4 |
| KDC | 21.05 |
| KR/s | 0.34 |
| ωi/(rad·s-1) | 16.36 |
| Cx0 | 0.18 |
| /(rad-2) | 7.65 |
| Sm/m2 | 0.013 |
| τδ/s | 0.04 |
Table 7 Related parameters of dynamic models and controllers
| 参数 | 数值 |
|---|---|
| Mα/s-2 | -423.6 |
| Mφ/s-1 | -0.07 |
| Mδ/s-2 | 331 |
| Zα/(m·s-2·rad-1) | -705 |
| Zδ/(m·s-2·rad-1) | -165 |
| KA/(rad·s·m-1) | 4.5×10-4 |
| KDC | 21.05 |
| KR/s | 0.34 |
| ωi/(rad·s-1) | 16.36 |
| Cx0 | 0.18 |
| /(rad-2) | 7.65 |
| Sm/m2 | 0.013 |
| τδ/s | 0.04 |

Fig.10 Dynamic simulated results
| [1] |
黄景帅, 张洪波, 汤国建, 等. 拦截大气层内机动目标的自适应积分滑模制导律[J]. 宇航学报, 2019, 40(1):51-60.
|
|
|
|
| [2] |
|
| [3] |
盛永智, 甘佳豪, 张成新. 弹道可调的落角约束分数阶滑模制导律设计[J]. 航空学报, 2023, 44(7):177-190.
|
|
|
|
| [4] |
|
| [5] |
马帅, 王旭刚, 王中原, 等. 带初始前置角和末端攻击角约束的偏置比例导引律设计以及剩余飞行时间估计[J]. 兵工学报, 2019, 40(1):68-78.
|
|
|
|
| [6] |
王晓海, 孟秀云, 周峰, 等. 基于偏置比例导引的落角约束滑模制导律[J]. 系统工程与电子技术, 2021, 43(5):1295-1302.
|
|
|
|
| [7] |
严鹏辉, 刘刚, 缪前树. 基于落角约束的偏置比例导引律的研究[J]. 现代防御技术, 2021, 49(6):43-48,55.
|
|
|
|
| [8] |
|
| [9] |
黄嘉, 常思江, 陈琦, 等. 不依赖剩余飞行时间的数据驱动攻击时间控制导引律[J]. 兵工学报, 2023, 44(8):2299-2309.
|
|
|
|
| [10] |
黄嘉, 常思江. 基于数据驱动的攻击时间和攻击角度控制导引律[J]. 系统工程与电子技术, 2022, 44(10):3213-3220.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
王江, 刘经纬, 崔晓曦, 等. 有限视场下的攻击时间和角度多约束制导律[J]. 北京理工大学学报, 2024, 44(1):18-27.
|
|
|
|
| [16] |
|
| [17] |
李彤, 孟志鹏, 吕良, 等. 微型导弹纵向扰动抑制控制系统设计[J]. 国防科技大学学报, 2021, 43(1):7-15.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
梁晨, 王卫红, 赖超. 带攻击角度约束的深度强化元学习制导律[J]. 宇航学报, 2021, 42(5):611-620.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
刘子超, 王江, 何绍溟, 等. 基于预测校正的落角约束计算制导方法[J]. 航空学报, 2022, 43(8):515-530.
|
|
|
|
| [24] |
李博皓, 安旭曼, 杨晓飞, 等. 攻击角度约束下的分布式强化学习制导方法[J]. 宇航学报, 2022, 43(8):1061-1069.
|
|
|
|
| [25] |
|
| [26] |
郑成辰. 基于深度强化学习的约束末制导律研究[D]. 成都: 四川大学,2023:9.
|
|
|
|
| [27] |
田嘉懿. 低成本全捷联微型导弹制导控制技术研究[D]. 长沙: 国防科学技术大学,2019:124.
|
|
|
| [1] | SUN Hao, LI Haiqing, LIANG Yan, MA Chaoxiong, WU Han. Dynamic Penetration Decision of Loitering Munition Group Based on Knowledge-assisted Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(9): 3161-3176. |
| [2] | WU Hao, LI Dongguang, WANG Yong’an. Time-to-go Estimation Method for Anti-ship Missiles with Large Lead Angle in Three-dimensional Space [J]. Acta Armamentarii, 2024, 45(5): 1449-1459. |
| [3] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [4] | FU Yanfang, LEI Kailin, WEI Jianing, CAO Zijian, YANG Bo, WANG Wei, SUN Zelong, LI Qinjie. A Hierarchical Multi-Agent Collaborative Decision-making Method Based on the Actor-critic Framework [J]. Acta Armamentarii, 2024, 45(10): 3385-3396. |
| [5] | CAO Zijian, SUN Zelong, YAN Guochuang, FU Yanfang, YANG Bo, LI Qinjie, LEI Kailin, GAO Linghang. Simulation of Reinforcement Learning-based UAV Swarm Adversarial Strategy Deduction [J]. Acta Armamentarii, 2023, 44(S2): 126-134. |
| [6] | WANG Yuchen, WANG Wei, LIN Shiyao, YANG Jing, WANG Shaolong, YIN Zhao. Three-dimensional Adaptive Sliding Mode Cooperative Guidance Law with Impact Time and Angle Constraints [J]. Acta Armamentarii, 2023, 44(9): 2778-2790. |
| [7] | DU Hongbao, WANG Zhengjie, TANG Lixi, ZHANG Xiaoning. Control Barrier Function-based Control for Aircraft Avoidance and Guidance with Dynamic Obstacles [J]. Acta Armamentarii, 2023, 44(9): 2814-2823. |
| [8] | ZHOU Meng, QIAN Weixian, REN Kan. Study of the Guidance Law for Super-Twisting Sliding-Mode Guided Projectiles with Multiple Constraints [J]. Acta Armamentarii, 2023, 44(3): 799-805. |
| [9] | LIU Wei-dong, CHENG Rui-feng, GAO Li-e, ZHANG Jian-jun. Cooperative Engagement-based Differential Guidance Law for Underwater Interceptor [J]. Acta Armamentarii, 2016, 37(9): 1684-1691. |
| [10] | MENG Ke-zi, ZHOU Di. H∞ Guidance Law Accounting for Dynamics of Missile Autopilot [J]. Acta Armamentarii, 2016, 37(7): 1194-1202. |
| [11] | LI Qiang, LU Bao-gang, WANG Xiao-hui, WANG Yong-hai, ZHUANG Ling. A Terminal Multi-constraint Optimal Guidance Law for Missile [J]. Acta Armamentarii, 2016, 37(6): 1131-1137. |
| [12] | DUAN Mei-jun, ZHOU Di. A Guidance Law with Finite Time under Control Variable Constraint [J]. Acta Armamentarii, 2016, 37(6): 1030-1037. |
| [13] | ZHANG Chun-yan, SONG Jian-mei, HOU Bo, ZHANG Min-qiang. Cooperative Guidance Law with Impact Angle and Impact Time Constraints for Networked Missiles [J]. Acta Armamentarii, 2016, 37(3): 431-438. |
| [14] | LI Zeng-yan, LI Xiao-min, LIU Qiu-sheng. Trajectory Tracking Algorithm for Motion Compensation of Loitering Munition under Wind Environment [J]. Acta Armamentarii, 2016, 37(12): 2377-2384. |
| [15] | ZHANG Wen-yuan, XIA Qun-li, LIU Da-wei. Research on Guidance Matching of Guidance Law with Multiple Constraints and Seeker Disturbance Rejection Rate [J]. Acta Armamentarii, 2015, 36(8): 1473-1480. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||