
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (9): 3204-3215.doi: 10.12382/bgxb.2023.0909
Previous Articles Next Articles
NIU Yilong, YANG Yi*( ), ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin
), ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin
Received:2023-09-08
Online:2024-01-26
Contact:
YANG Yi
CLC Number:
NIU Yilong, YANG Yi, ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin. Path Planning Method for Unmanned Surface Vessel in On-call Submarine Search Based on Improved DQN Algorithm[J]. Acta Armamentarii, 2024, 45(9): 3204-3215.
Add to citation manager EndNote|Ris|BibTeX
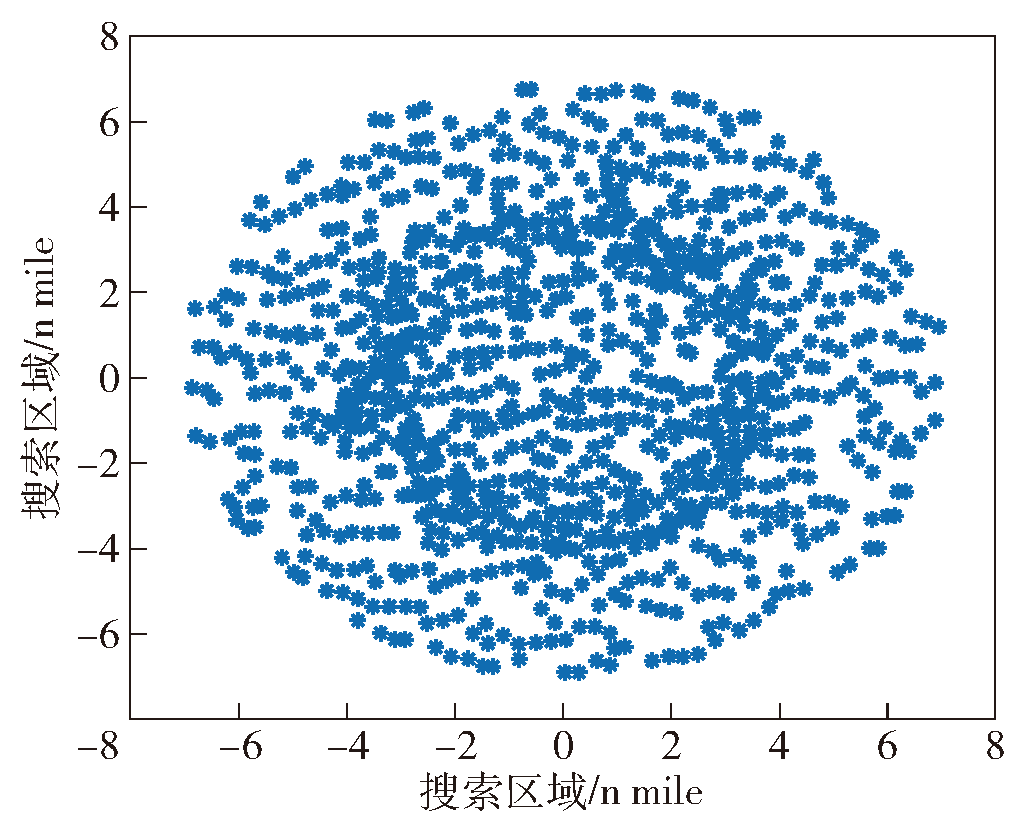
Fig.1 Target submarine position distribution with unknown speed
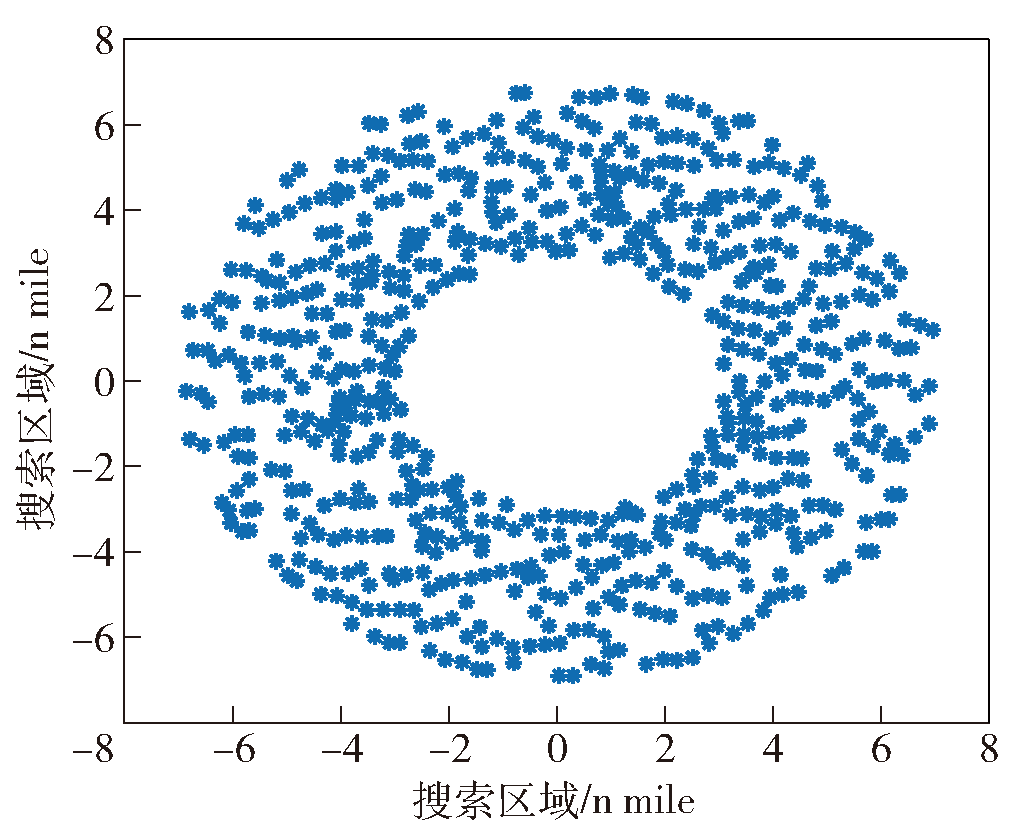
Fig.2 Target submarine position distribution with known speed
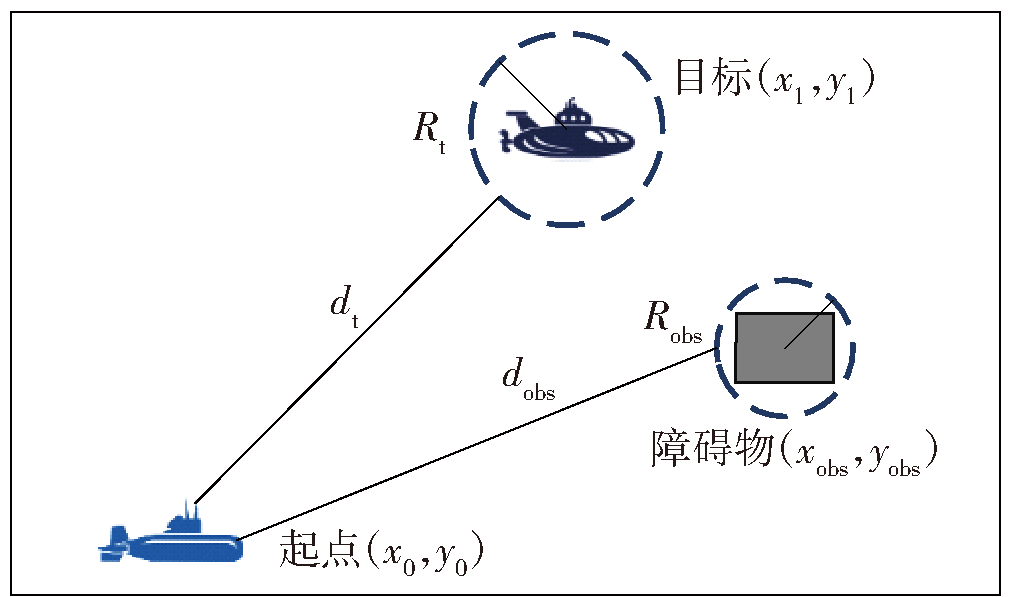
Fig.3 USV state space model
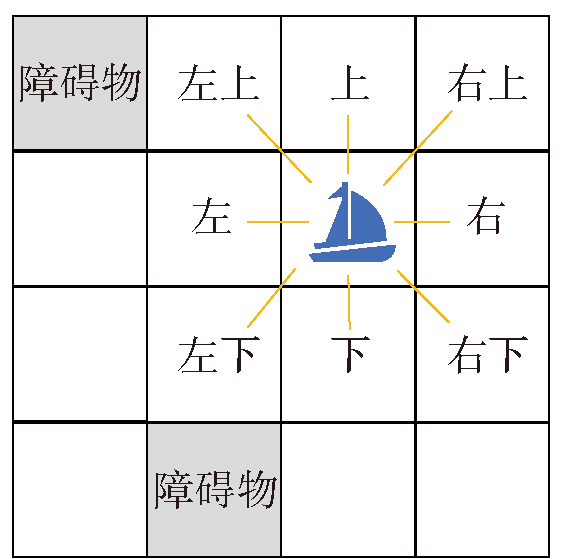
Fig.4 Action space optimization
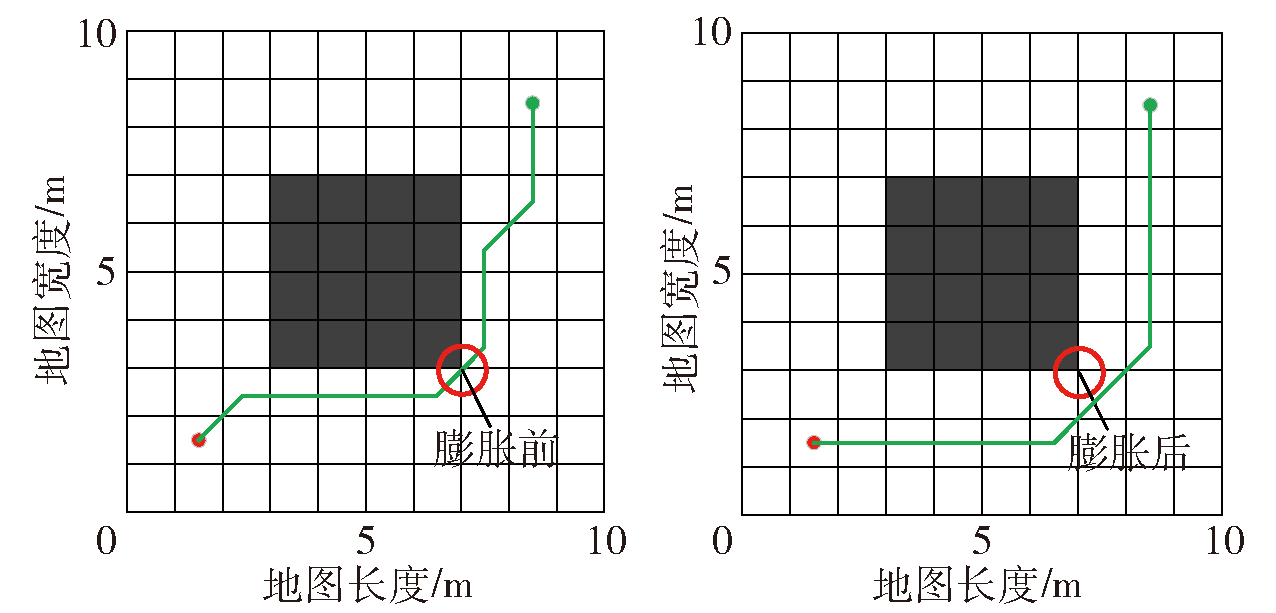
Fig.5 Schematic diagram of path before(lift) and after(right) expansion
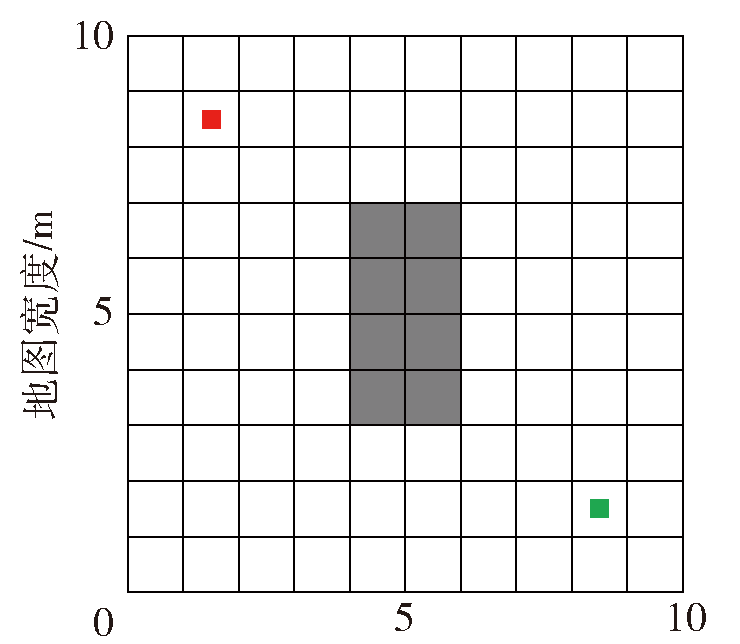
Fig.6 Simulation environment
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| 动作空间大小 | 8 | 隐藏层个数 | 2 | |
| 学习率α | 0.01 | 神经元个数 | 64 | |
| 衰减率γ | 0.90 | 经验池大小 | 10 000 | |
| 探索率ε | [0.01,0.99] | 取样数目 | 32 |
Table 1 Model training parameters
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| 动作空间大小 | 8 | 隐藏层个数 | 2 | |
| 学习率α | 0.01 | 神经元个数 | 64 | |
| 衰减率γ | 0.90 | 经验池大小 | 10 000 | |
| 探索率ε | [0.01,0.99] | 取样数目 | 32 |
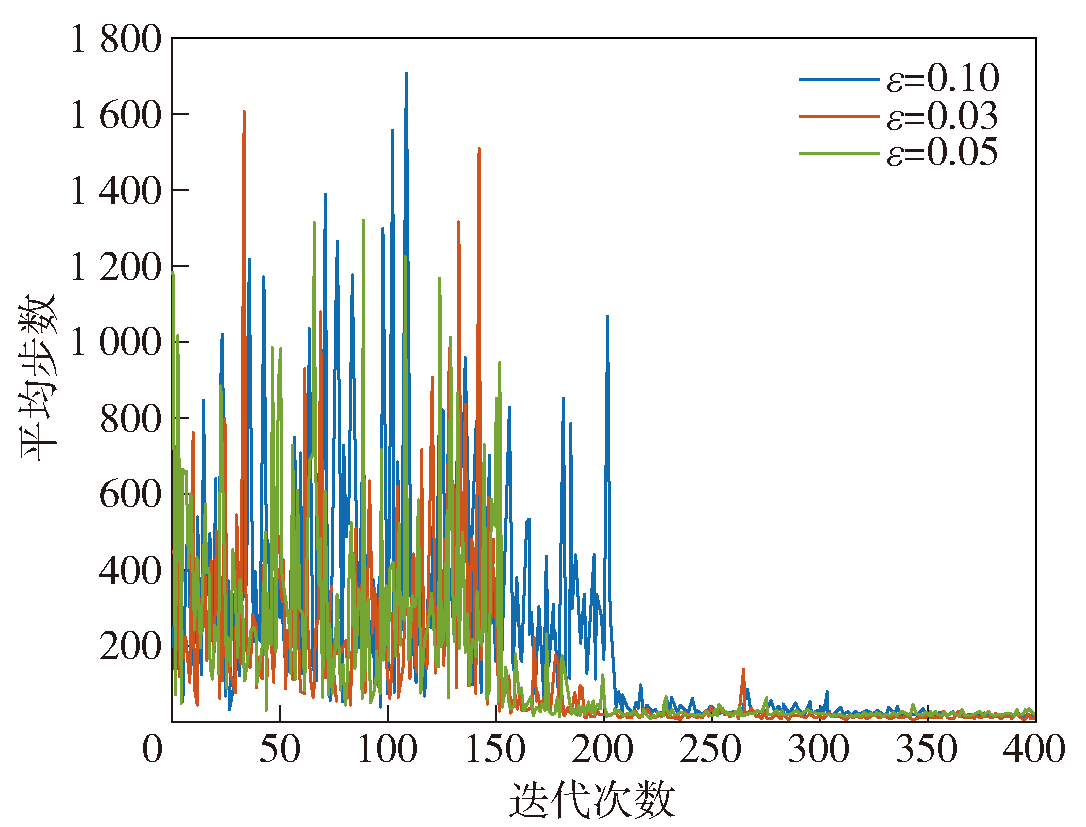
Fig.7 Convergence curves with different values of ε
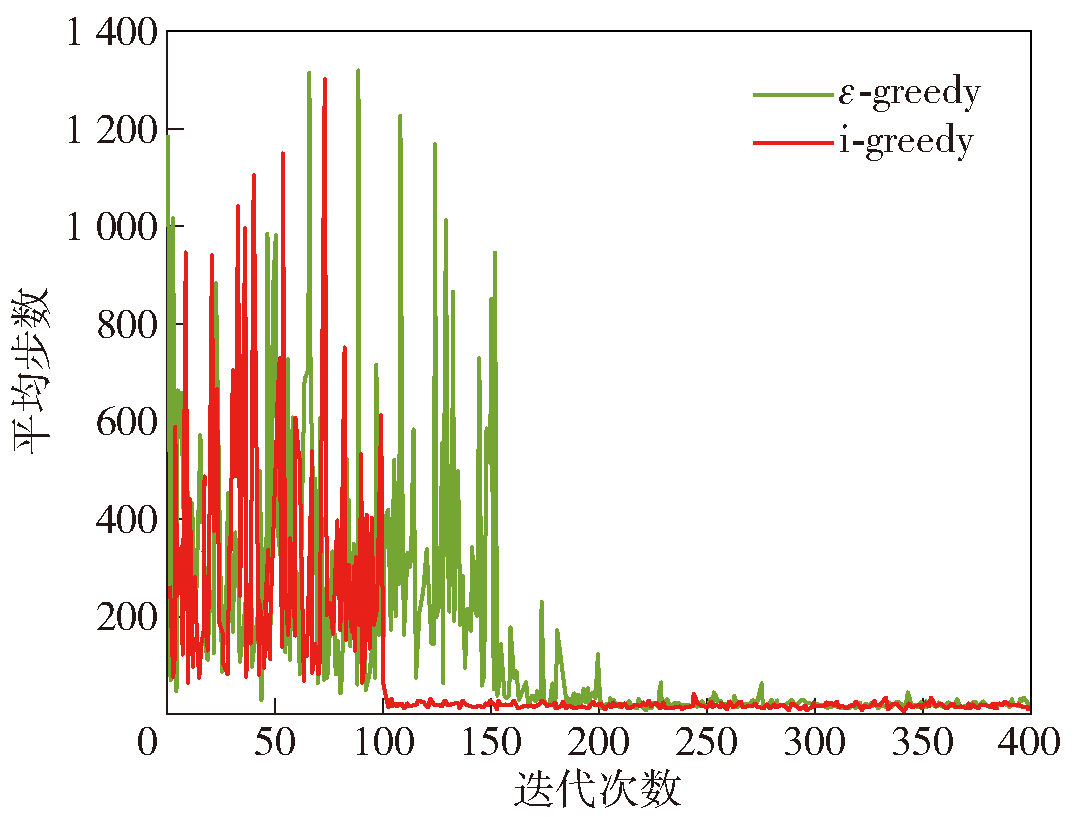
Fig.8 Comparison of convergences before and after strategy improvement
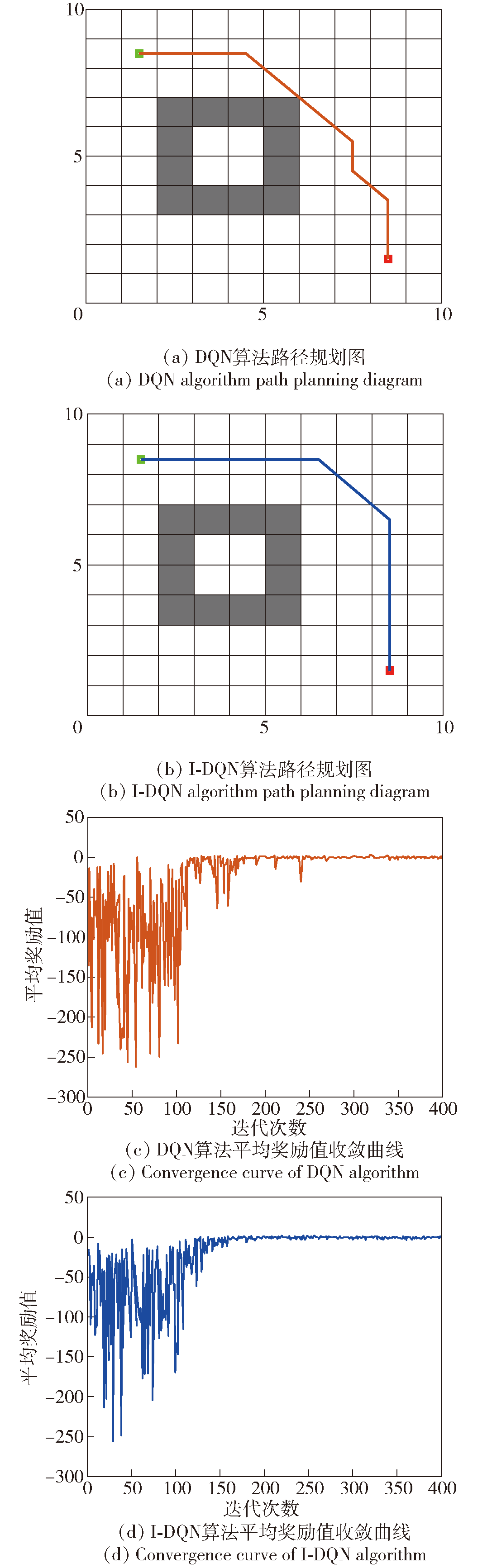
Fig.9 Comparison of path planning and average reward value in 10m×10m map
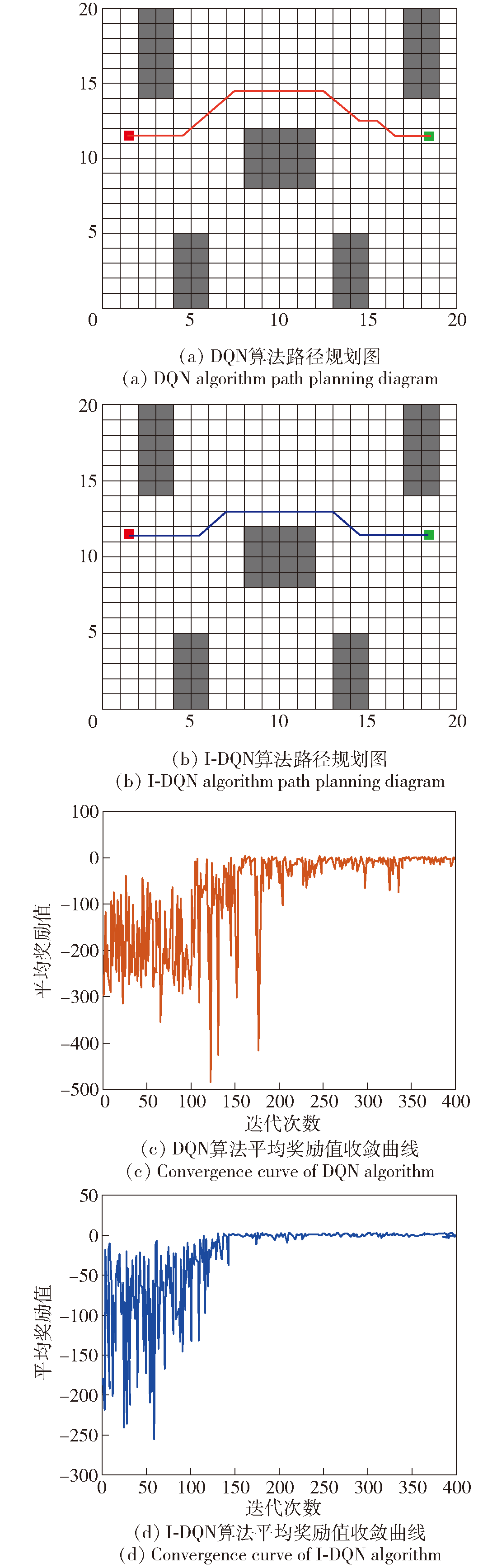
Fig.10 Comparison of path planning and average reward value in 20m×20m map
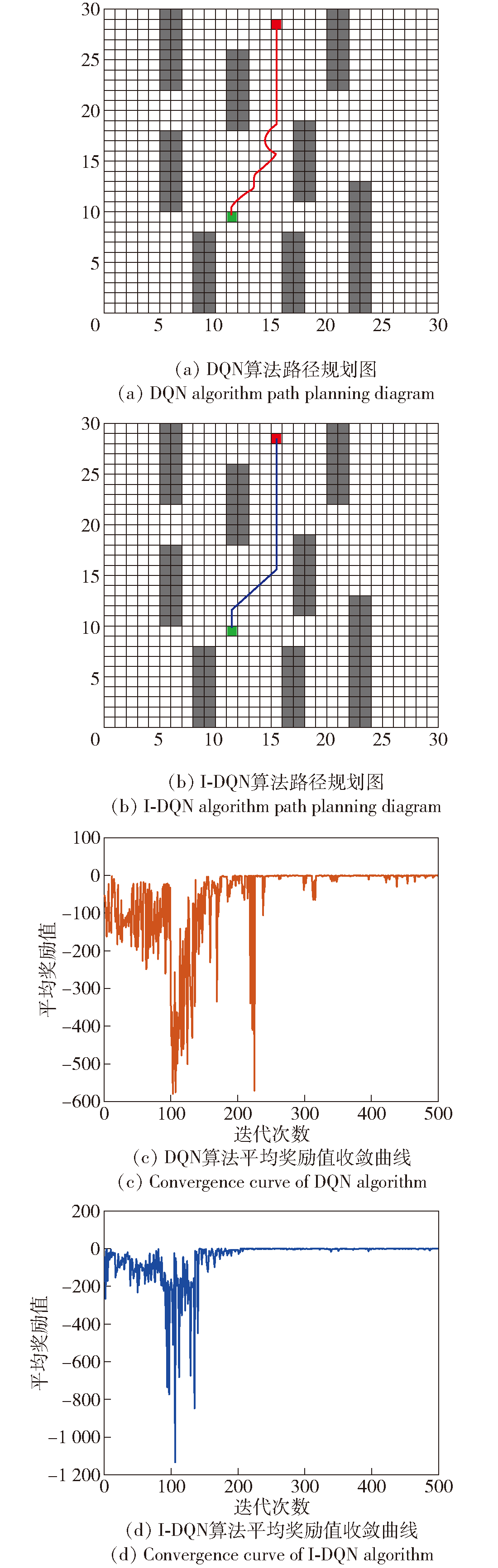
Fig.11 Comparison of path planning and average reward value in 30m×30m map
| 算法 | 环境 尺寸/m | 平均路径 长度/m | 迭代稳定 代数 | 拐点数 | 是否 碰撞 |
|---|---|---|---|---|---|
| 10×10 | 11.66 | 136 | 4 | 是 | |
| DQN | 20×20 | 19.48 | 156 | 6 | 否 |
| 30×30 | 21.48 | 188 | 7 | 否 | |
| 10×10 | 12.83 | 141 | 2 | 否 | |
| I-DQN | 20×20 | 18.24 | 150 | 4 | 否 |
| 30×30 | 20.66 | 169 | 2 | 否 |
Table 2 Simulated results under different environments
| 算法 | 环境 尺寸/m | 平均路径 长度/m | 迭代稳定 代数 | 拐点数 | 是否 碰撞 |
|---|---|---|---|---|---|
| 10×10 | 11.66 | 136 | 4 | 是 | |
| DQN | 20×20 | 19.48 | 156 | 6 | 否 |
| 30×30 | 21.48 | 188 | 7 | 否 | |
| 10×10 | 12.83 | 141 | 2 | 否 | |
| I-DQN | 20×20 | 18.24 | 150 | 4 | 否 |
| 30×30 | 20.66 | 169 | 2 | 否 |
| 环境尺寸/m | 平均路径长度/% | 收敛速度/% | 拐点减少数/个 |
|---|---|---|---|
| 10×10 | -10 | -3.68 | 2 |
| 20×20 | 6 | 3.85 | 2 |
| 30×30 | 3.82 | 10.11 | 5 |
Table 3 Performance improvement of I-DQN compared with DQN algorithm
| 环境尺寸/m | 平均路径长度/% | 收敛速度/% | 拐点减少数/个 |
|---|---|---|---|
| 10×10 | -10 | -3.68 | 2 |
| 20×20 | 6 | 3.85 | 2 |
| 30×30 | 3.82 | 10.11 | 5 |
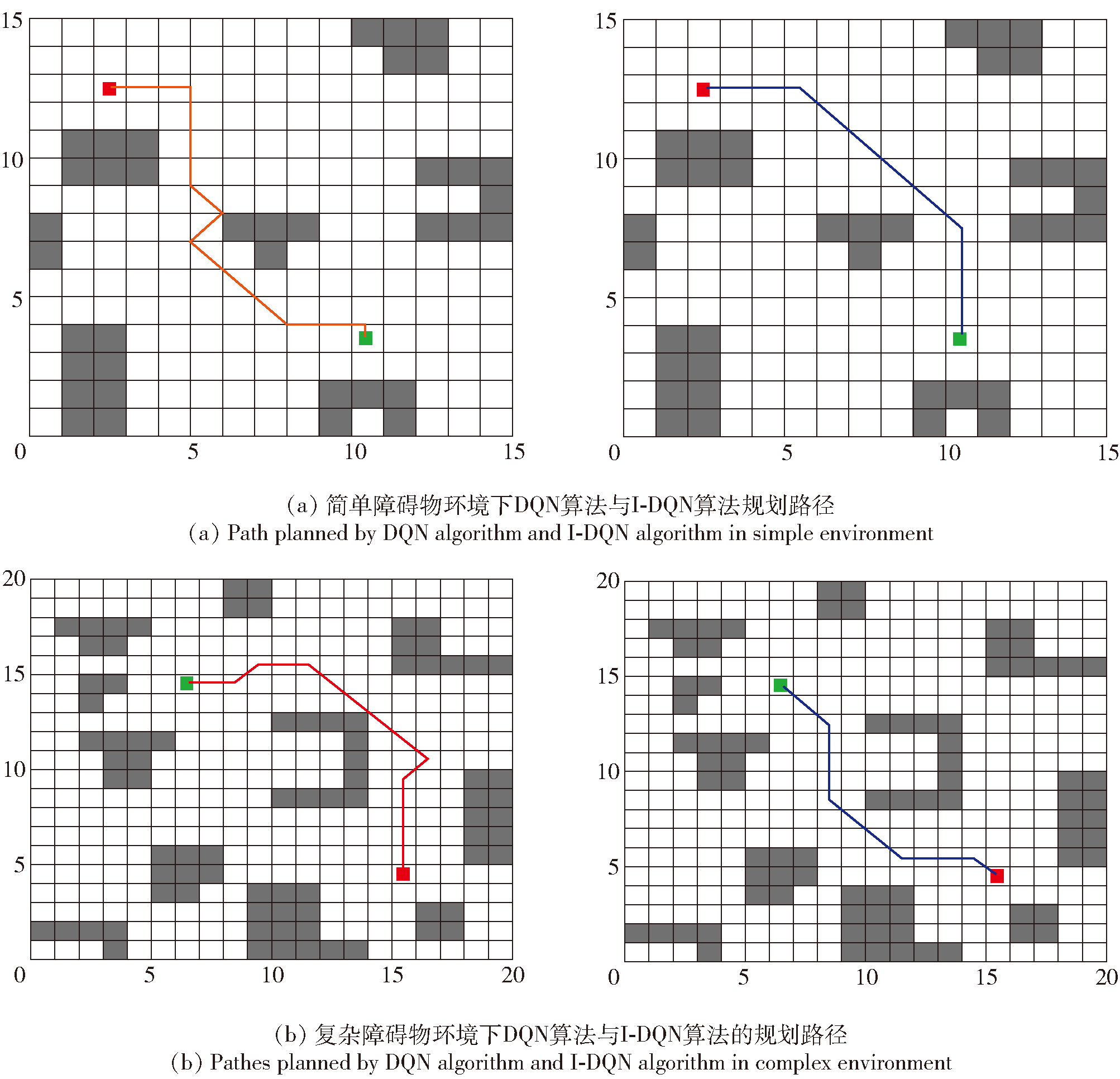
Fig.12 Path planning with different algorithm in different obstacles environments
| 环境 | 算法 | 平均 路径 长度/m | 避开障 碍物 数/个 | 拐点 数/个 | 平均路径 长度缩短 程度/% | 拐点数 减少数/ 个 |
|---|---|---|---|---|---|---|
| 简单 | DQN | 10.54 | 2 | 6 | 10.5 | 4 |
| I-DQN | 9.54 | 3 | 2 | |||
| 复杂 | DQN | 10.95 | 3 | 5 | 14.9 | 1 |
| I-DQN | 9.53 | 4 | 4 |
Table 4 Statistical comparison of simulated data under simple and complex obstacle environments
| 环境 | 算法 | 平均 路径 长度/m | 避开障 碍物 数/个 | 拐点 数/个 | 平均路径 长度缩短 程度/% | 拐点数 减少数/ 个 |
|---|---|---|---|---|---|---|
| 简单 | DQN | 10.54 | 2 | 6 | 10.5 | 4 |
| I-DQN | 9.54 | 3 | 2 | |||
| 复杂 | DQN | 10.95 | 3 | 5 | 14.9 | 1 |
| I-DQN | 9.53 | 4 | 4 |
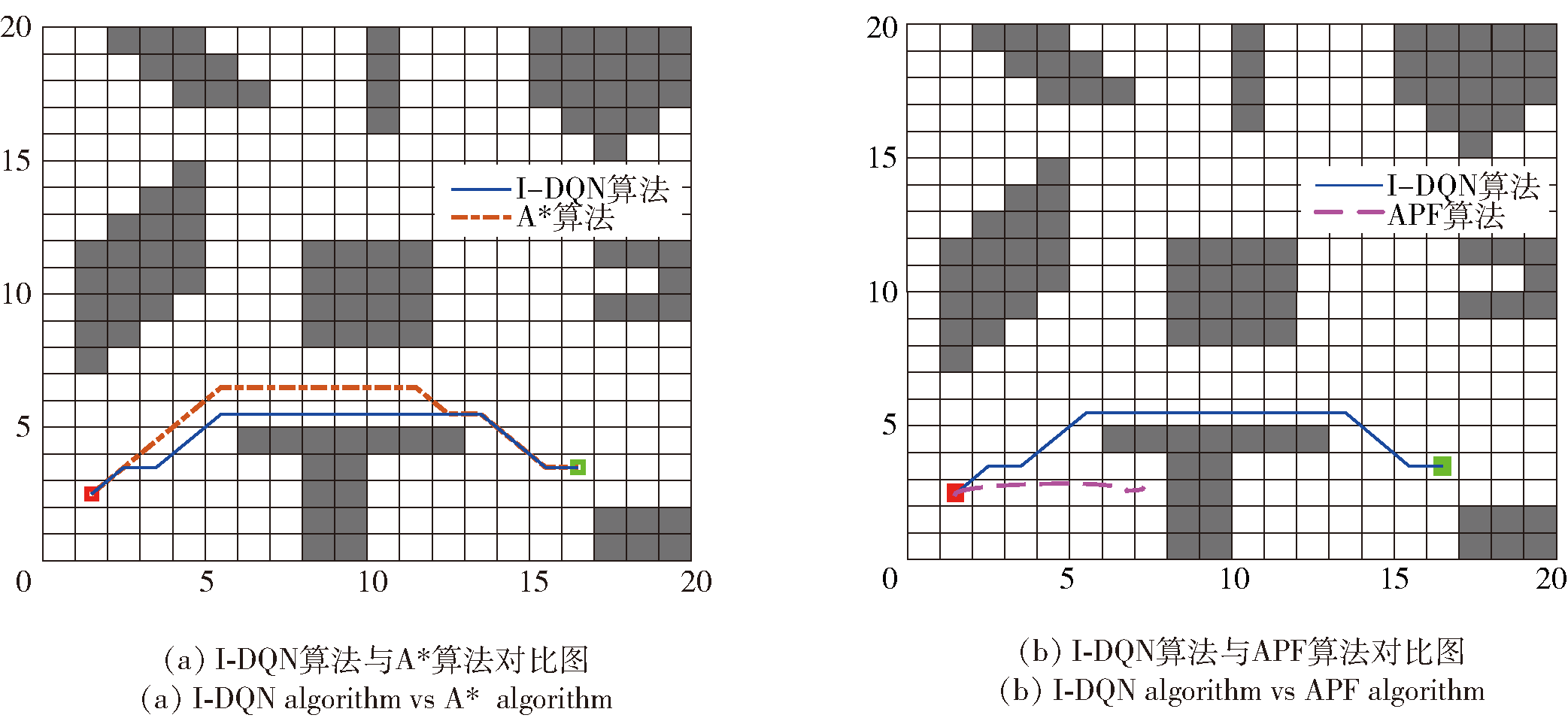
Fig.13 Algorithm comparison of starting point and ending point on both sides of T-shaped obstacle
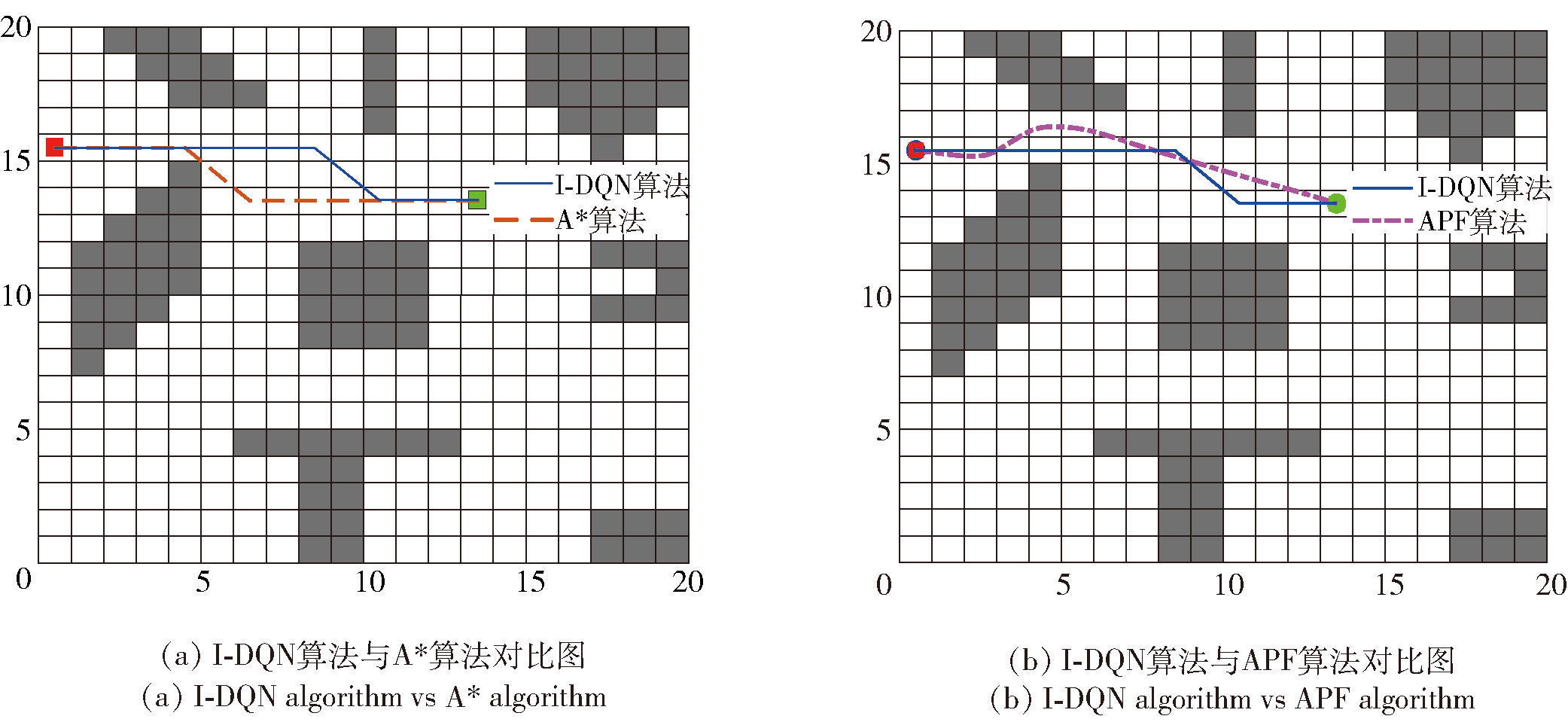
Fig.14 Algorithm comparison of the path passing through the narrow feasible region
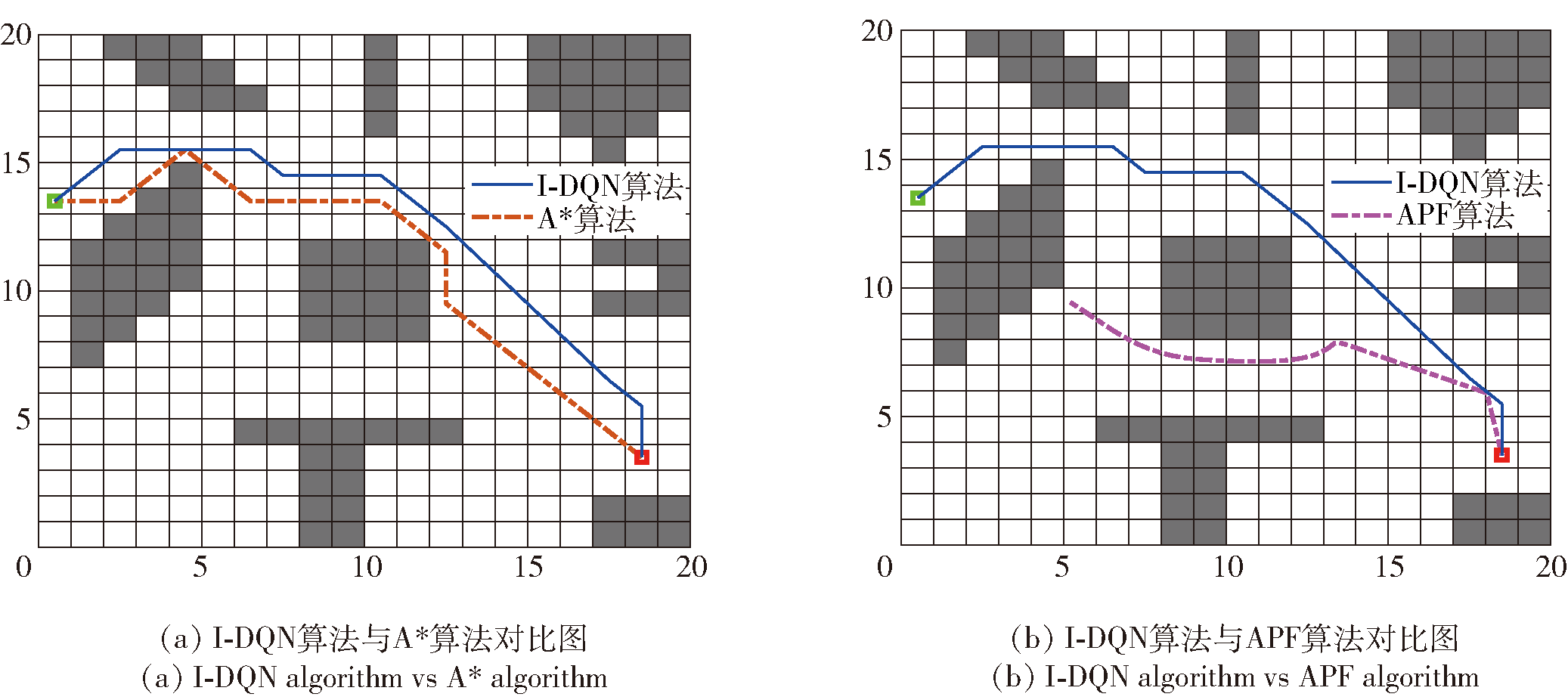
Fig.15 Algorithm comparison of starting point and ending point distributed near obstacles
| 算法 | 起点和终点位置 | 是否完 成任务 | 路径 长度/m | 是否 碰撞 | 拐点 数 |
|---|---|---|---|---|---|
| T型障碍物两侧 | 是 | 17.90 | 否 | 5 | |
| A* | 狭窄可行域 | 是 | 13.83 | 是 | 2 |
| 障碍物附近 | 是 | 24.97 | 是 | 6 | |
| T型障碍物两侧 | 否 | ||||
| APF | 狭窄可行域 | 是 | 16.17 | 否 | |
| 障碍物附近 | 否 | ||||
| T型障碍物两侧 | 是 | 17.07 | 否 | 5 | |
| I-DQN | 狭窄可行域 | 是 | 13.83 | 否 | 2 |
| 障碍物附近 | 是 | 25.97 | 否 | 5 |
Table 5 Comparison of indicators under different test conditions
| 算法 | 起点和终点位置 | 是否完 成任务 | 路径 长度/m | 是否 碰撞 | 拐点 数 |
|---|---|---|---|---|---|
| T型障碍物两侧 | 是 | 17.90 | 否 | 5 | |
| A* | 狭窄可行域 | 是 | 13.83 | 是 | 2 |
| 障碍物附近 | 是 | 24.97 | 是 | 6 | |
| T型障碍物两侧 | 否 | ||||
| APF | 狭窄可行域 | 是 | 16.17 | 否 | |
| 障碍物附近 | 否 | ||||
| T型障碍物两侧 | 是 | 17.07 | 否 | 5 | |
| I-DQN | 狭窄可行域 | 是 | 13.83 | 否 | 2 |
| 障碍物附近 | 是 | 25.97 | 否 | 5 |
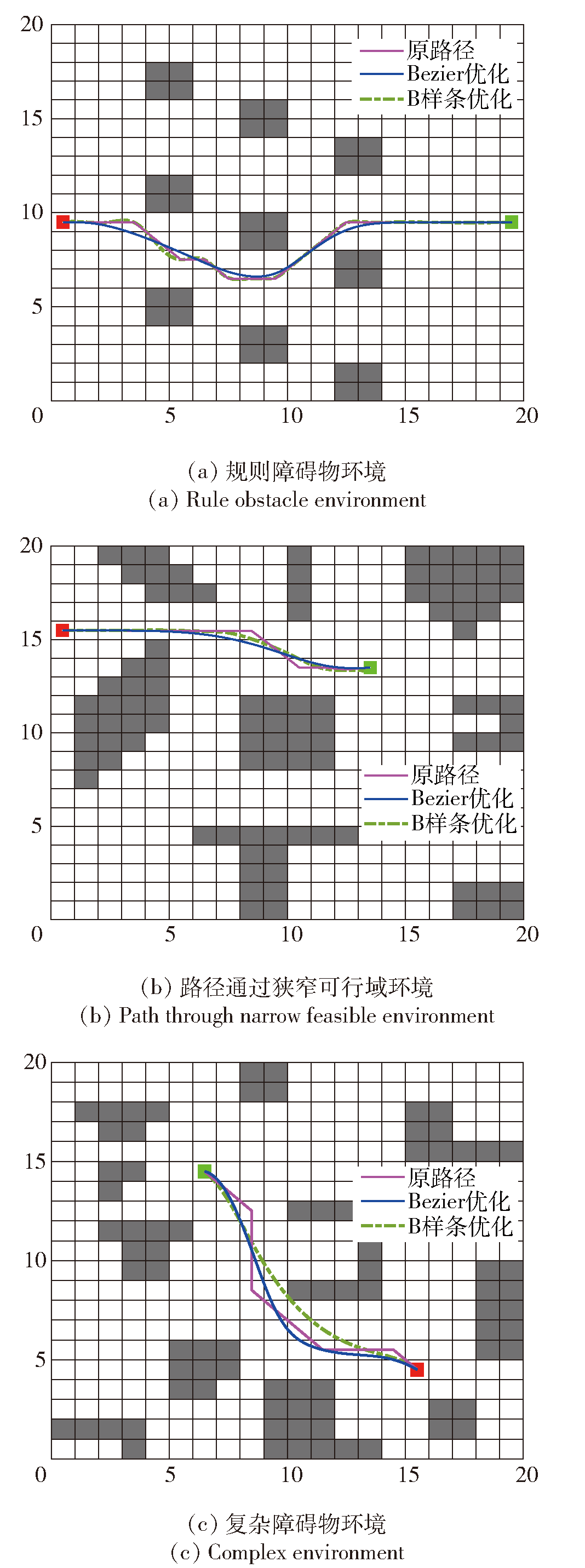
Fig.16 Comparison of path optimization methods
| [1] |
|
| [2] |
郑荣, 辛传龙, 汤钟, 等. 无人水面艇自主部署自主水下机器人平台技术综述[J]. 兵工学报, 2020, 41(8):1675-1687.
doi: 10.3969/j.issn.1000-1093.2020.08.022 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.022 |
|
| [3] |
|
| [4] |
刘佳, 王杰. 无人水面艇避障路径规划算法综述[J]. 计算机应用与软件, 2020, 37(8):1-10, 20.
|
|
|
|
| [5] |
李元昊, 段鹏飞, 郭绍义, 等. 船舶全局路径规划相关算法研究综述[J]. 船舶标准化工程师, 2022, 55(5):26-30,55.
|
|
|
|
| [6] |
陶亚东, 张会霞, 于海深. 水面无人艇全局路径规划常用算法简述[J]. 应用数学进展, 2022, 11(3):1400-1405.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
张沫, 吴一卓. 基于A*算法的搬运机器人路径规划优化[J]. 现代电子技术, 2023, 46(13):135-139.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
孙玉山, 王力锋, 吴菁, 等. 智能水下机器人路径规划方法综述[J]. 舰船科学技术, 2020, 42(4):1-7.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
李涛, 彭耿, 刘磊. 远海目标散布模型研究及特性分析[J]. 战术导弹技术, 2021(3):20-27.
|
|
|
|
| [20] |
崔东华, 纪秀美, 代志恒, 等. 基于瑞利-均匀分布的AUV应召搜索目标散布区域估计方法[J]. 水下无人系统学报, 2021, 29(5):580-585.
|
|
|
|
| [21] |
张宁, 寇小明, 李斌, 等. 基于遗传算法的应召搜潜路径优化[J]. 水下无人系统学报, 2023, 31(2):244-251.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
王冰晨, 连晓峰, 颜湘, 等. 基于深度Q网络和人工势场的移动机器人路径规划研究[J]. 计算机测量与控制, 2022, 30(11): 226-232,239.
|
|
|
|
| [26] |
许志远. 基于改进神经网络的船舶航行路径规划[J]. 舰船科学技术, 2022, 44(14):57-60.
|
|
|
|
| [27] |
徐晗, 金隼, 罗磊, 等. 基于拓扑栅格建模的AGV路径规划算法优化[J]. 计算机工程与设计, 2022, 43(1):101-109.
|
|
|
|
| [28] |
|
| [29] |
张家闻, 房浩霖, 李家旺. 基于复杂约束条件的欠驱动AUV三维路径规划[J]. 兵工学报, 2022, 43(6): 1407-1414.
doi: 10.12382/bgxb.2021.0340 |
|
doi: 10.12382/bgxb.2021.0340 |
|
| [30] |
|
| [1] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [2] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [3] | WANG Xiaolong, CHEN Yang, HU Mian, LI Xudong. Robot Path Planning for Persistent Monitoring Based on Improved Deep Q Networks [J]. Acta Armamentarii, 2024, 45(6): 1813-1823. |
| [4] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [5] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [6] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [7] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [8] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [9] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [10] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [11] | XU Bo, XIAO Yong-ping, GAO Wei, LIU Ya-long, YANG Jian. A Cooperative Navigation Approach and Its Verification of USVs with Leader-fellower Structure [J]. Acta Armamentarii, 2014, 35(11): 1836-1845. |
| [12] | ZHANG Lei, FANG Yang-wang, CHAI Dong, YONG Xiao-ju. Cruise Missile Path Planning Based on Improved Quantum Evolutionary Algorithm [J]. Acta Armamentarii, 2014, 35(11): 1820-1827. |
| [13] | FU Yang-guang, ZHOU Cheng-ping2, HU Han-ping2. Research on Differential Evolution Algorithm for Path Planning for Unmanned Aerial Vehicle inOcean Environment [J]. Acta Armamentarii, 2012, 33(3): 295-300. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||