
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3394-3406.doi: 10.12382/bgxb.2023.0776
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
FU Jinbo1,2, ZHANG Dong1,2,*( ), WANG Mengyang1,2, ZHAO Junmin3,4
), WANG Mengyang1,2, ZHAO Junmin3,4
Received:2023-08-21
Online:2023-11-02
Contact:
ZHANG Dong
CLC Number:
FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy[J]. Acta Armamentarii, 2023, 44(11): 3394-3406.
Add to citation manager EndNote|Ris|BibTeX
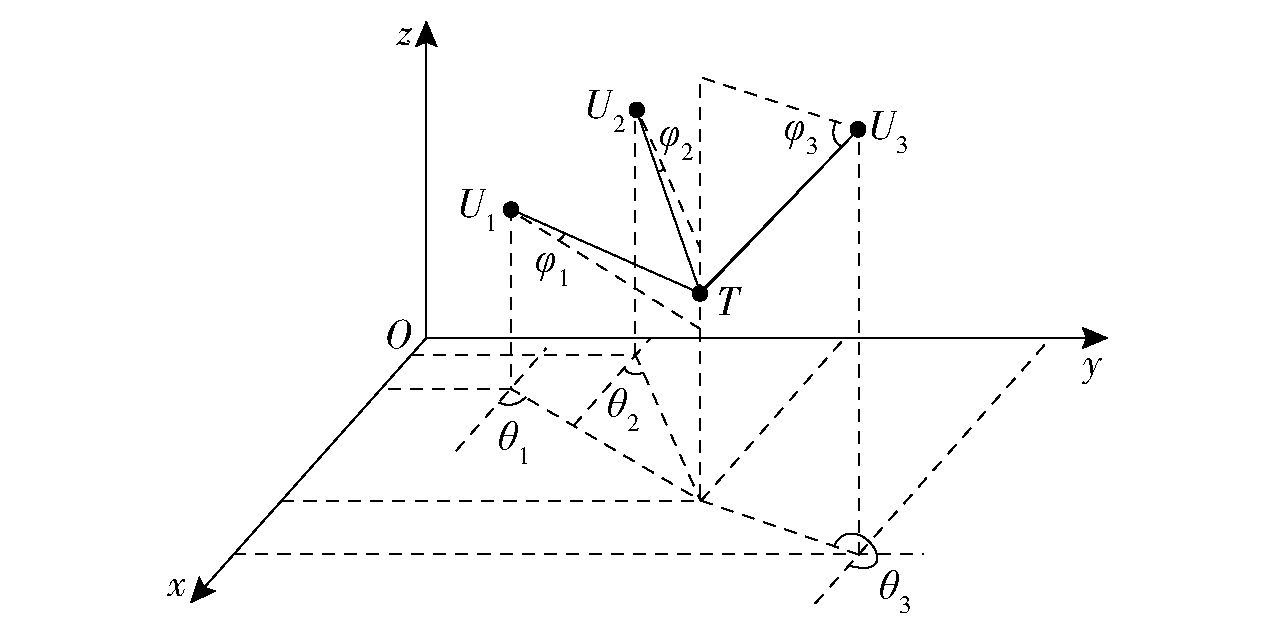
Fig.1 Schematic diagram of direction-finding cross-positioning
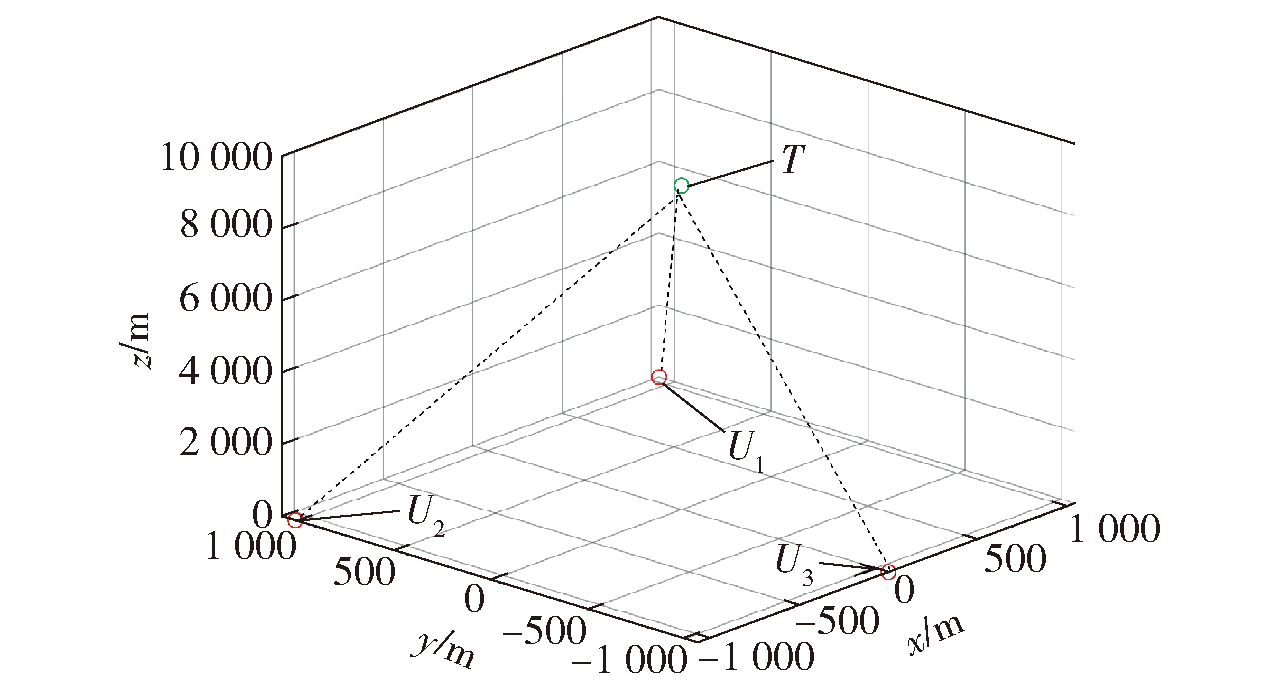
Fig.2 Simulated scenario diagram

Fig.3 Relationship between target position and GDOP at different altitudes
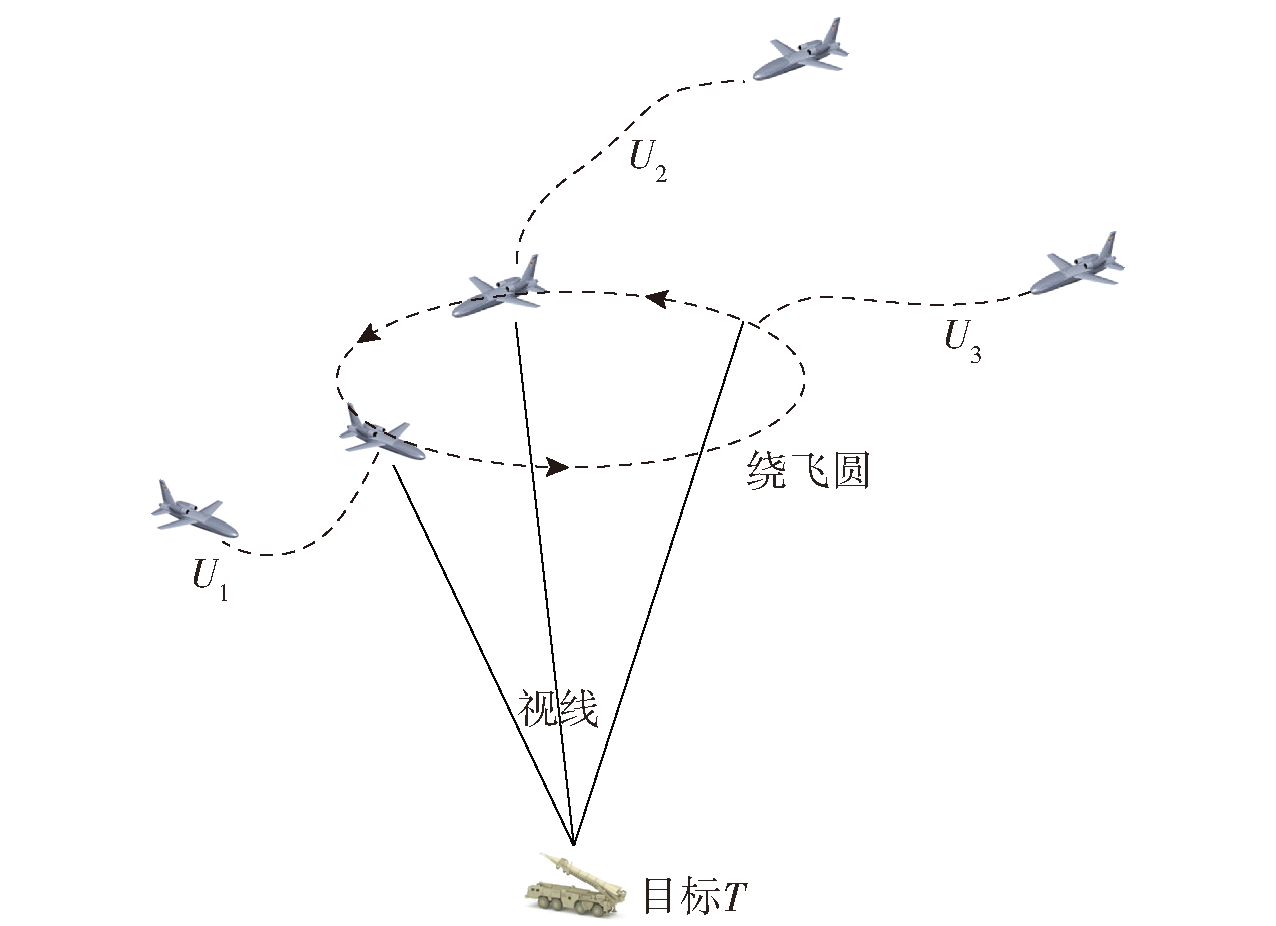
Fig.4 Low-speed target go-around co-positioning strategy
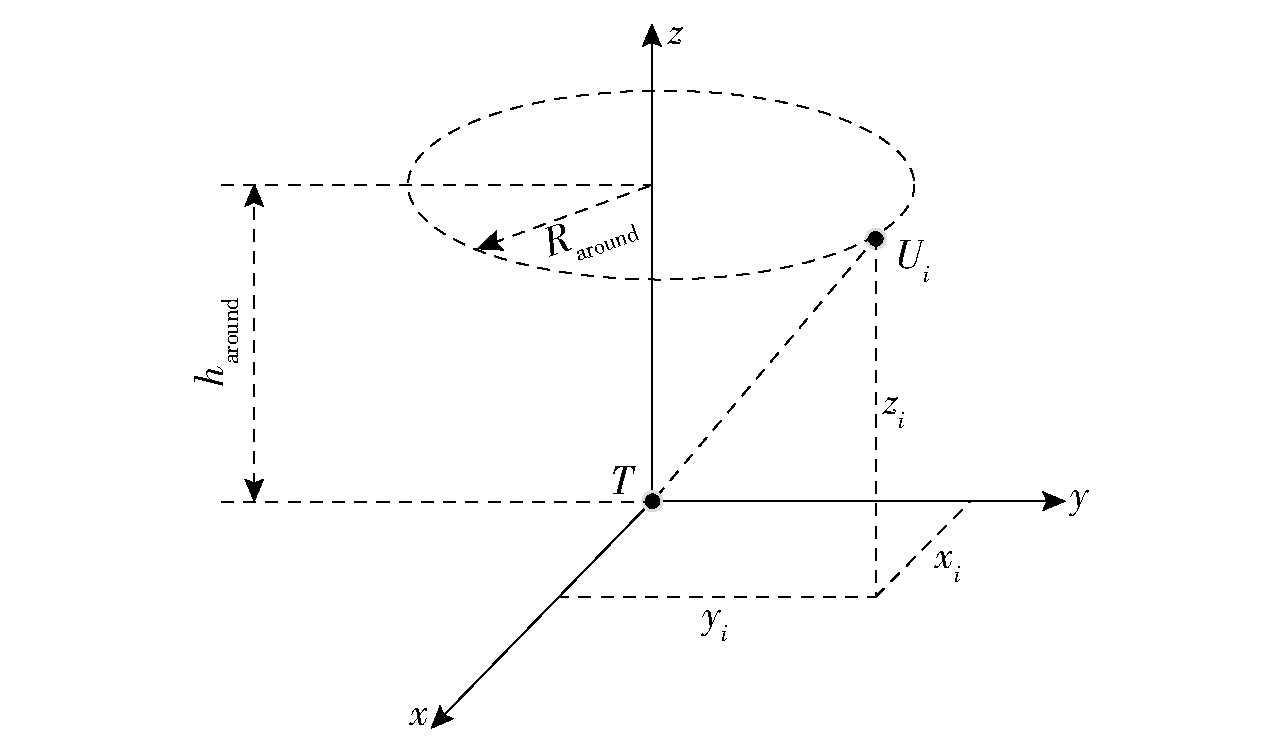
Fig.5 Schematic diagram of fly-by-wire co-positioning model
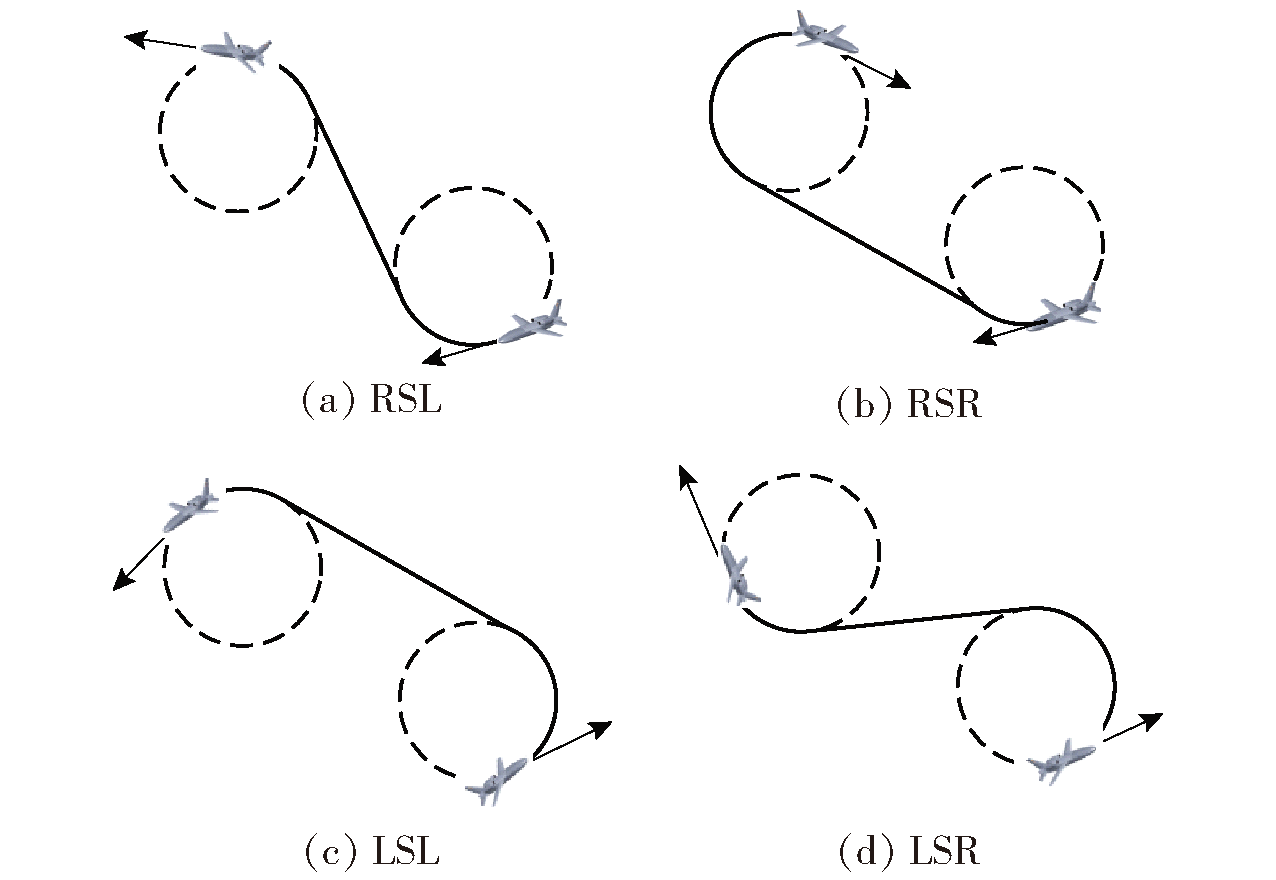
Fig.6 4 basic forms of Dubins curves
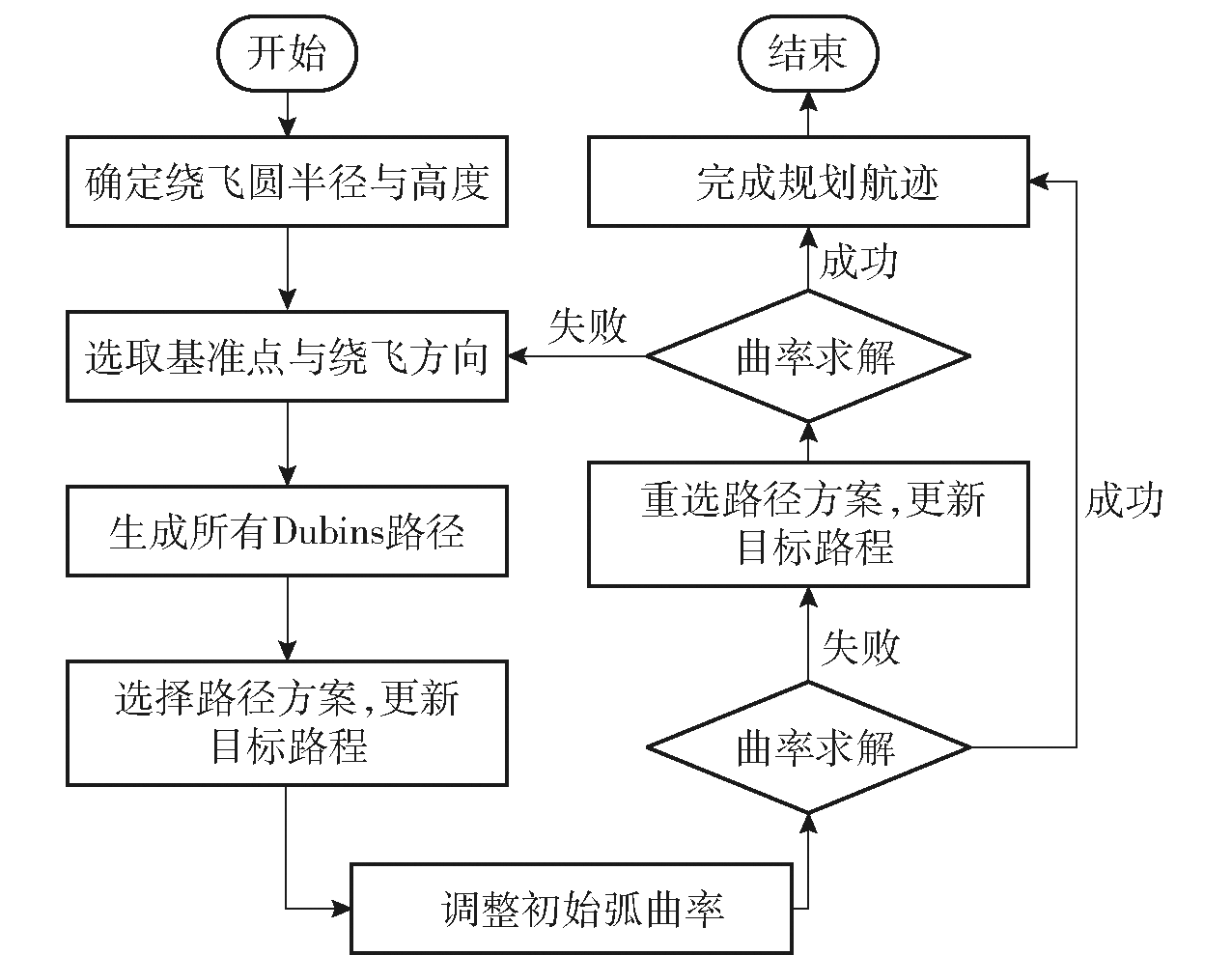
Fig.7 Path planning process
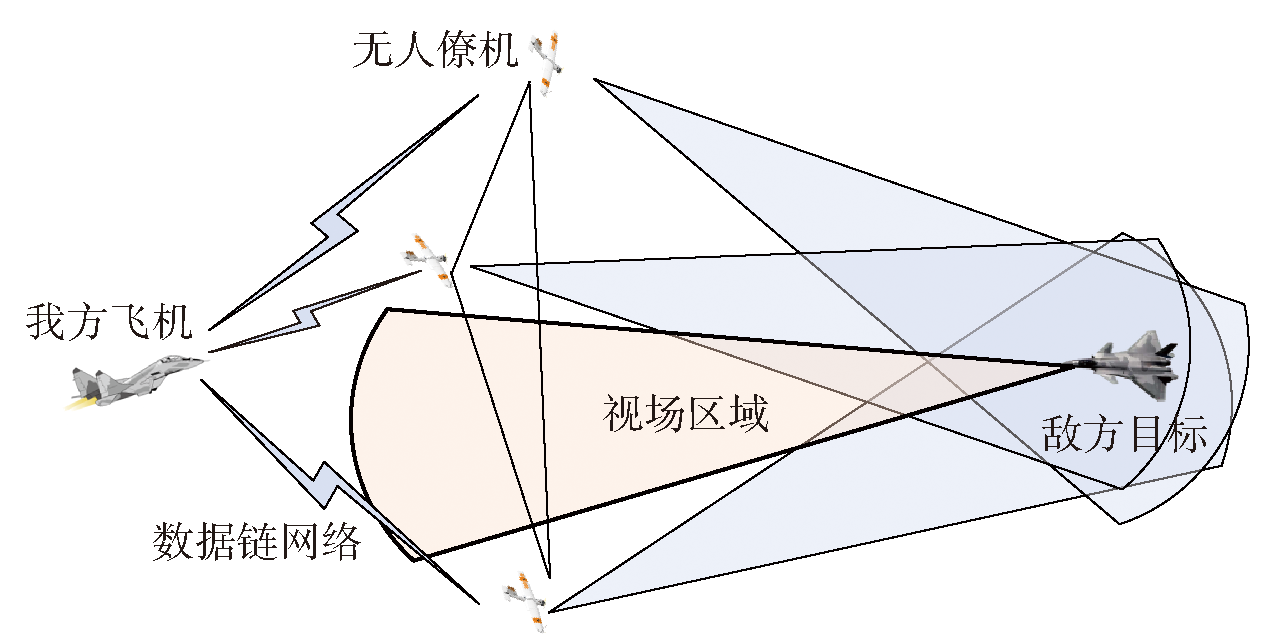
Fig.8 Schematic diagram of high-speed maneuvering target co-positioning scenario
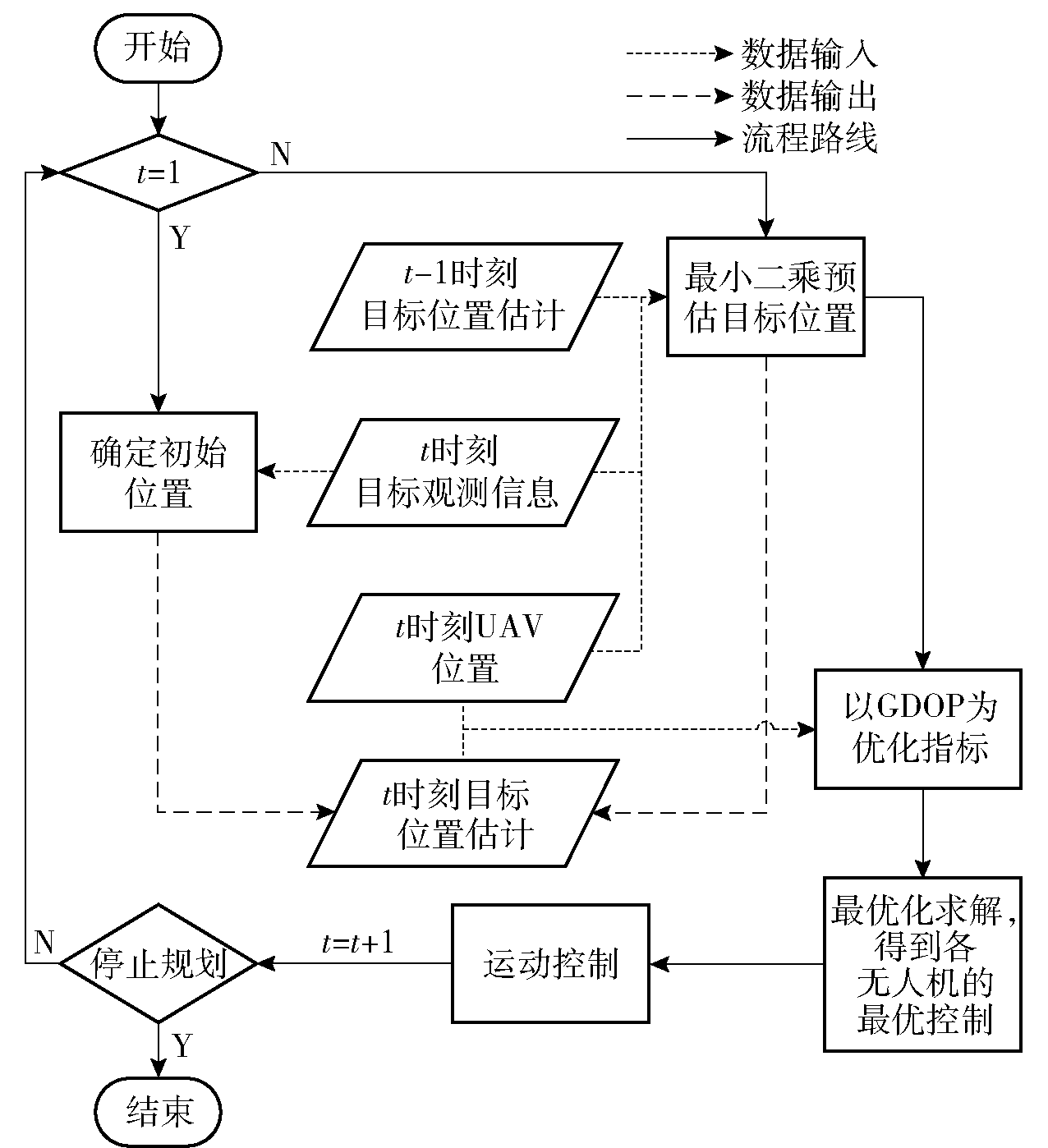
Fig.9 Flowchart of the proposed algorithm
| 参数 | 数值 |
|---|---|
| 无人机1初始状态 | P1=[ ] |
| 无人机2初始状态 | P2=[ ] |
| 无人机3初始状态 | P3=[ ] |
| 无人机4初始状态 | P4=[ ] |
| 目标初始位置/m | PT=[0 0] |
| 基准点速度方向/rad | |
| 最低飞行高度/m | 100 |
| 最小转弯半径/m | 100 |
Table 1 Simulation parameters
| 参数 | 数值 |
|---|---|
| 无人机1初始状态 | P1=[ ] |
| 无人机2初始状态 | P2=[ ] |
| 无人机3初始状态 | P3=[ ] |
| 无人机4初始状态 | P4=[ ] |
| 目标初始位置/m | PT=[0 0] |
| 基准点速度方向/rad | |
| 最低飞行高度/m | 100 |
| 最小转弯半径/m | 100 |
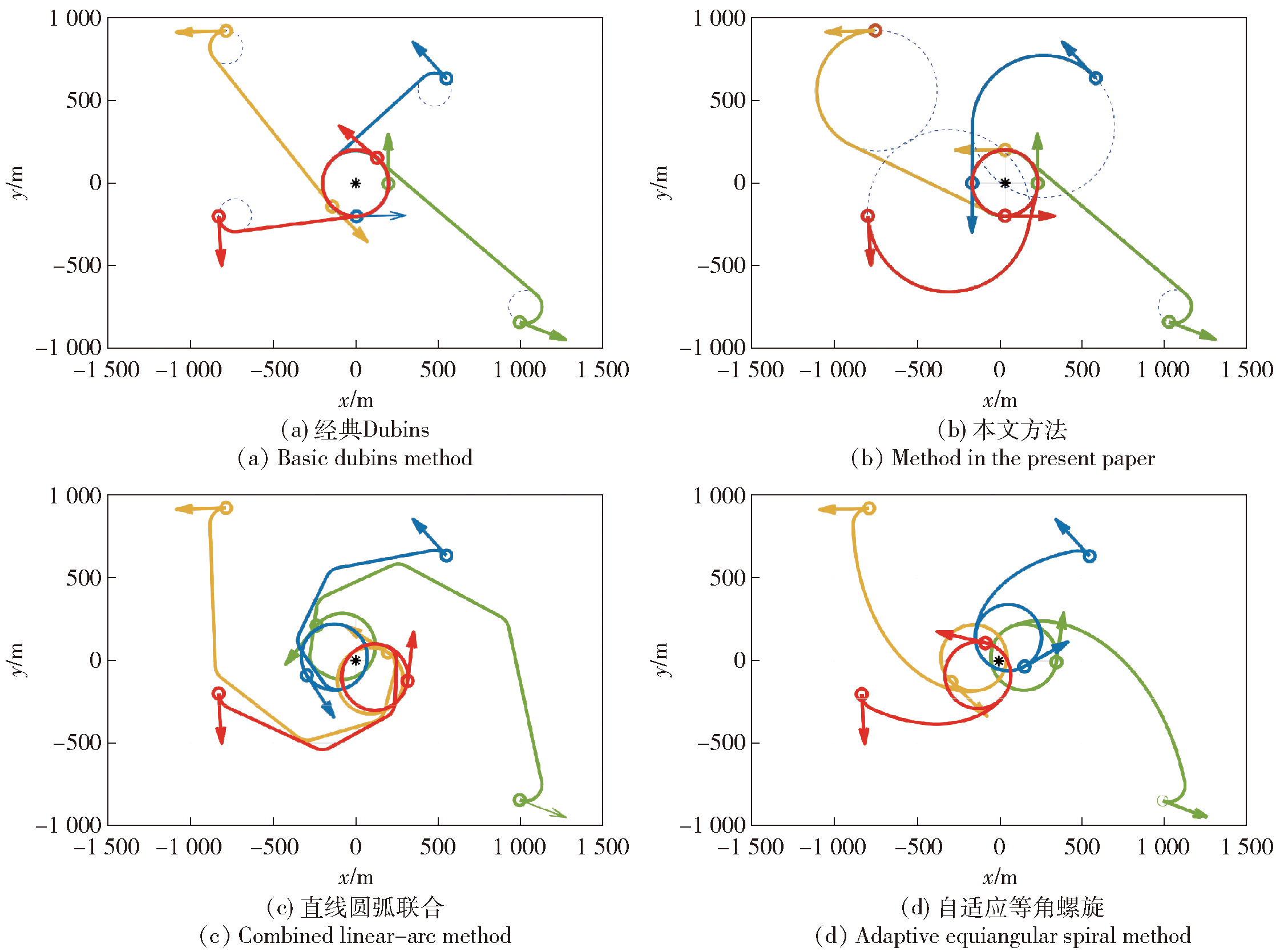
Fig.10 Comparison of cooperative path planning result paths
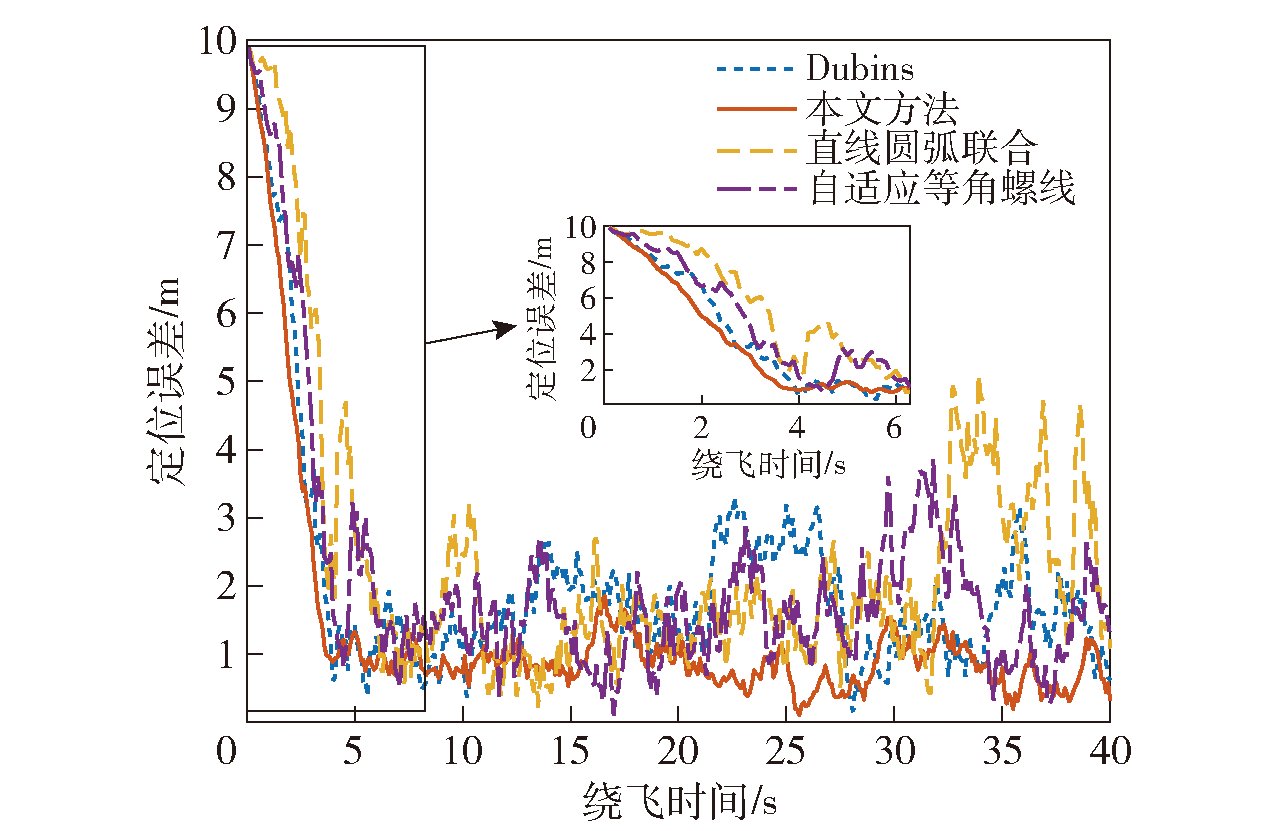
Fig.11 Comparison of errors of different methods
| 航迹规划方法 | 平均误差/m | 航迹规划方法 | 平均误差/m |
|---|---|---|---|
| Dubins | 1.2845 | 直线圆弧联合 | 2.7979 |
| 本文方法 | 0.8101 | 自适应等角螺线 | 1.7824 |
Table 2 Comparison of positioning errors
| 航迹规划方法 | 平均误差/m | 航迹规划方法 | 平均误差/m |
|---|---|---|---|
| Dubins | 1.2845 | 直线圆弧联合 | 2.7979 |
| 本文方法 | 0.8101 | 自适应等角螺线 | 1.7824 |
| 仿真参数 | 数值 |
|---|---|
| 无人机1初始位置/m | P1=[ ] |
| 无人机2初始位置/m | P2=[ ] |
| 无人机3初始位置/m | P3=[ ] |
| 目标初始位置/m | PT=[ ] |
| 无人机初始速度/(m·s-1) | 30 |
| 目标速度大小/(m·s-1) | 30 |
| 无人机速度范围/(m·s-1) | [20,40] |
| 加速度范围/(m·s-2) | [-1,1] |
| 视线角范围/(°) | -15≤λ≤15 |
| 最大通信距离/m | 3000 |
Table 3 Online planning simulation parameters
| 仿真参数 | 数值 |
|---|---|
| 无人机1初始位置/m | P1=[ ] |
| 无人机2初始位置/m | P2=[ ] |
| 无人机3初始位置/m | P3=[ ] |
| 目标初始位置/m | PT=[ ] |
| 无人机初始速度/(m·s-1) | 30 |
| 目标速度大小/(m·s-1) | 30 |
| 无人机速度范围/(m·s-1) | [20,40] |
| 加速度范围/(m·s-2) | [-1,1] |
| 视线角范围/(°) | -15≤λ≤15 |
| 最大通信距离/m | 3000 |
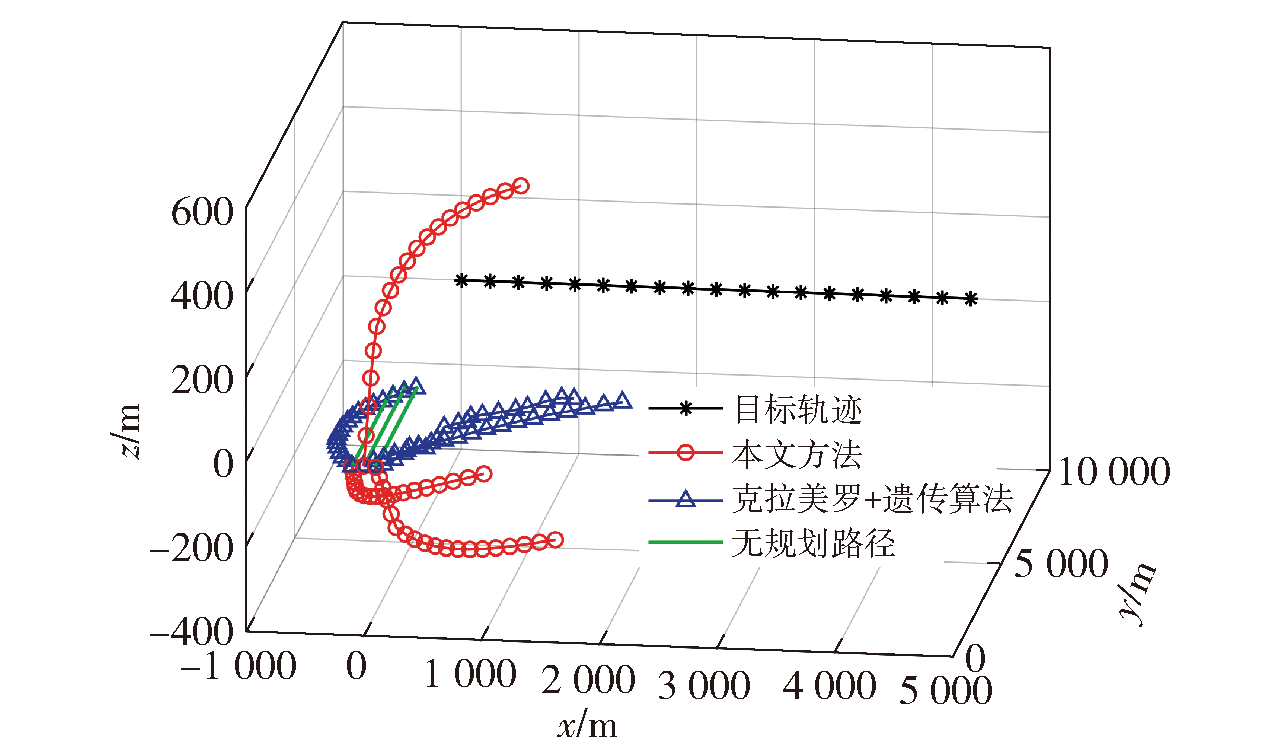
Fig.12 Comparison of paths of different methods
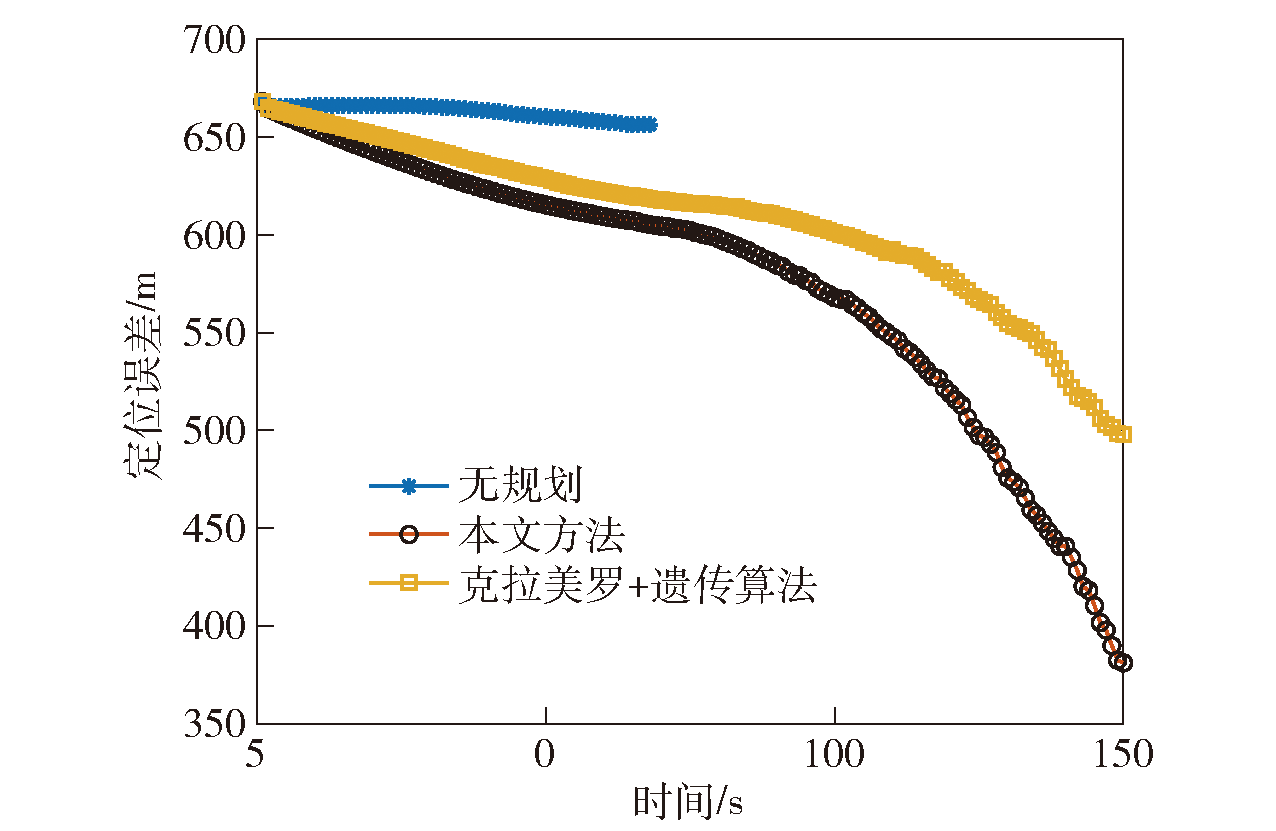
Fig.13 Comparison of positioning errors with different online methods

Fig.14 Semi-physical simulation experiment platform with combinination of virtuality and reality
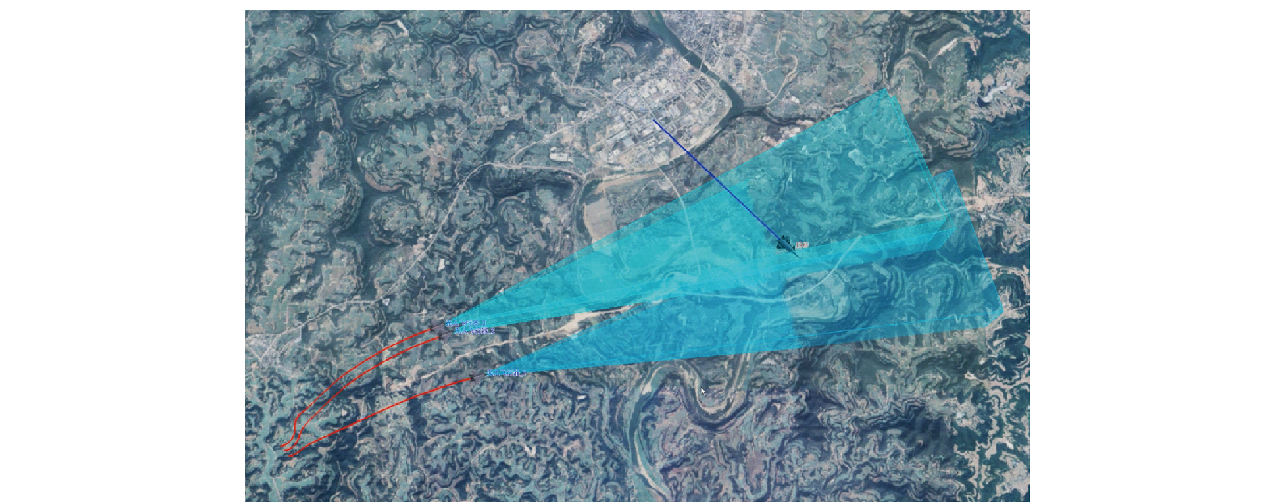
Fig.15 Simulation of online planning for three-UAV cooperative positioning
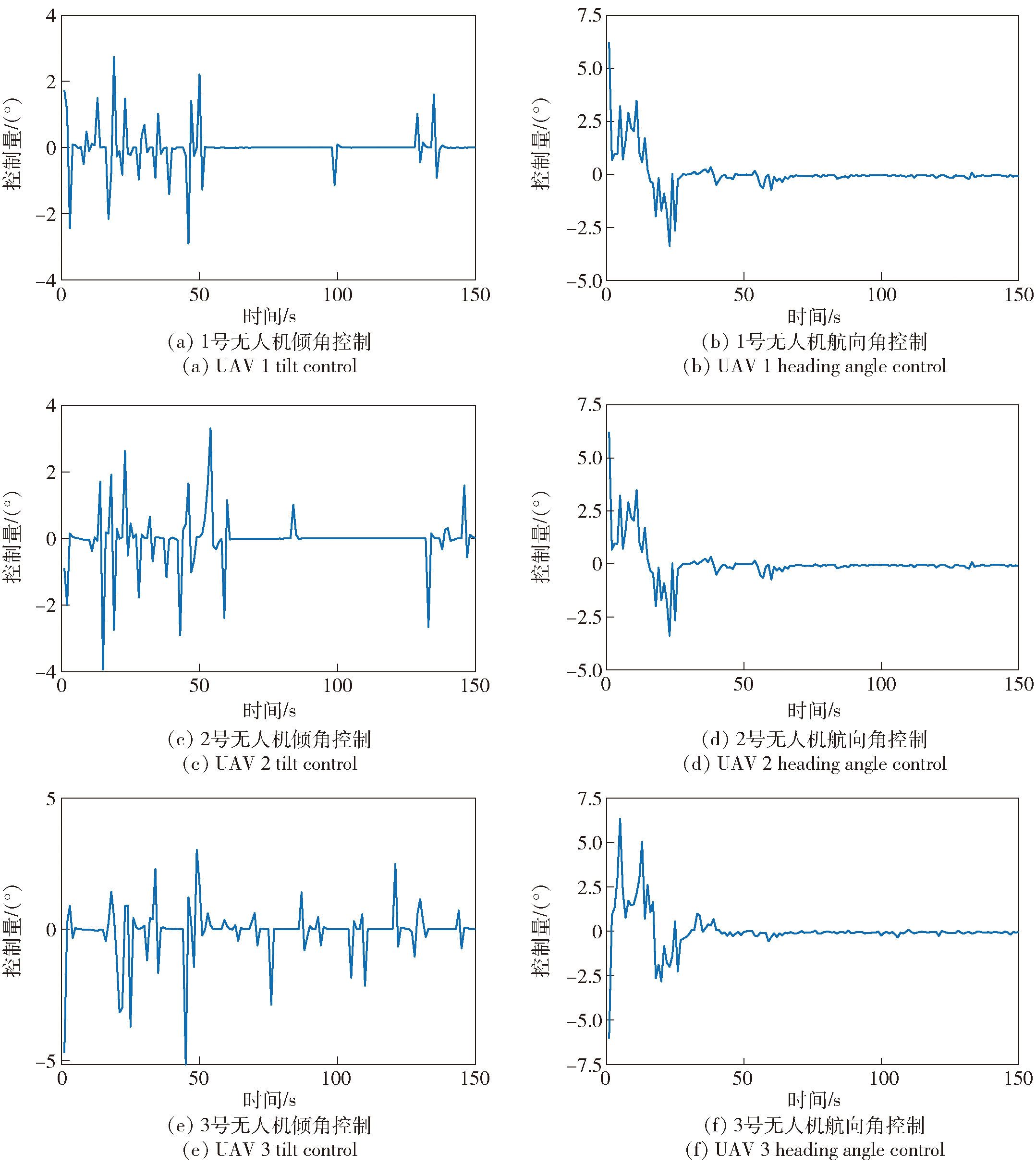
Fig.16 UAV control outputs
| [1] |
杨晨, 张少卿, 孟光磊. 多无人机协同任务规划研究[J]. 指挥与控制学报, 2018, 4(3):234-248.
|
|
|
|
| [2] |
武成锋, 程进, 郭晓云, 等. 飞行器集群协同定位与导航对抗技术发展与展望[J]. 宇航学报, 2022, 43(2):131-142.
|
|
|
|
| [3] |
doi: 10.1109/JIOT.2021.3081918 URL |
| [4] |
王鼎, 尹洁昕, 张欣光, 等. 一种基于加权多维标度分析的多个非相关源TDOA/FDOA协同定位方法[J]. 航空学报, 2023, 44(7):327105-1-327105-24.
|
|
|
|
| [5] |
doi: 10.1109/Access.6287639 URL |
| [6] |
|
| [7] |
何胜阳, 杜杰朋, 赵雅琴, 等. 基于TDOA的无人机集群协同单目标定位[J]. 系统工程与电子技术, 2023, 45(1):1-8.
doi: 10.12305/j.issn.1001-506X.2023.01.01 |
|
|
|
| [8] |
王维佳, 王玉冰, 田瑾, 等. 航空集群一发多收有源定位最优构型[J]. 兵工学报, 2023, 44(6):1655-1664.
doi: 10.12382/bgxb.2022.0104 |
|
|
|
| [9] |
张立川, 屈俊琪, 潘光, 等. 基于几何解释的集群AUV协同定位误差及编队构型分析[J]. 西北工业大学学报, 2020, 38(4):755-765.
|
|
doi: 10.1051/jnwpu/20203840755 URL |
|
| [10] |
朱徐东, 赖际舟, 周本川, 等. 基于构型寻优的多无人机鲁棒自适应协同定位方法[J]. 中国惯性技术学报, 2023, 31(7):650-658,664.
|
|
|
|
| [11] |
李清华, 高影, 王振桓, 等. 一种动态分组的多节点协同定位编队构型优化方法[J]. 中国惯性技术学报, 2022, 30(6):746-751,759.
|
|
|
|
| [12] |
胡利平, 梁晓龙, 张佳强, 等. 三机协同无源时差定位最优编队构型分析[J]. 火力与指挥控制, 2017, 42(9):49-54.
|
|
|
|
| [13] |
doi: 10.1109/ACCESS.2021.3090514 URL |
| [14] |
|
| [15] |
|
| [16] |
doi: 10.3390/app8061001 URL |
| [17] |
杨俊岭, 周宇, 王维佳, 等. 基于演化深度神经网络的无人机协同无源定位动态航迹规划[J]. 科技导报, 2018, 36(24):26-32.
|
|
|
|
| [18] |
顾伟, 吴靖, 李晟, 等. 带定位误差约束的多无人机快速协同航迹规划[J]. 计算机仿真, 2022, 39(10):60-65.
|
|
|
|
| [19] |
季瑶. 面向协同监控的无人机航迹规划问题研究[D]. 南京: 南京航空航天大学, 2020.
|
|
|
|
| [20] |
樊皓, 姜家财, 孙学. 双机协同交叉定位的三维航迹规划[J]. 传感器与微系统, 2020, 39(1):26-28,32.
|
|
|
|
| [21] |
doi: 10.3390/s22239380 URL |
| [22] |
关欣, 陶李, 衣晓. 多站协同定位的定位精度研究[J]. 计算机与数字工程, 2016, 44(5):829-834.
|
|
|
|
| [23] |
doi: 10.1007/s10514-020-09932-x |
| [24] |
|
| [25] |
勇俊, 李昭, 郑翠娥, 等. 超短基线纯方位定位的目标搜索航迹规划[J]. 哈尔滨工程大学学报, 2012, 33(4):438-444.
|
|
|
| [1] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [2] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [3] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [4] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [5] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [6] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| [7] | CAO Yan, LONG Teng, SUN Jingliang, ZHOU Yuze. Distributed Task Allocation Algorithm for Multiple Unmanned Aerial Vehicle Based on Information Retransmission and Package Loss Compensation [J]. Acta Armamentarii, 2023, 44(9): 2697-2708. |
| [8] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [9] | HAN Yu, SONG Tao, ZHENG Duo, LIU Xin. Unmanned Aerial Vehicle Cluster Cooperative Guidance Technology Based on Conflict Trigger Mechanism [J]. Acta Armamentarii, 2023, 44(7): 1881-1895. |
| [10] | ZHENG Lei, CHEN Zhimin, JIA Yuxuan. UAV Swarm Tracking Method Based on Wide-Area Deployment of Intelligent Reflecting Surfaces [J]. Acta Armamentarii, 2023, 44(6): 1837-1845. |
| [11] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| [12] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [13] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [14] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [15] | SHUAI Zhibin, HE Shuai, LI Guohui, LI Yaoheng, LI Yong, ZHANG Ying, JIAN Hongchao. Modeling and Optimal Control of Low-Temperature Starting Process of Electro-Mechanical Transmission for Special Tracked Vehicles [J]. Acta Armamentarii, 2023, 44(1): 117-128. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||