
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (8): 2658-2666.doi: 10.12382/bgxb.2023.0398
Previous Articles Next Articles
PAN Wuxing, LI Ruiqin*( )
)
Received:2023-05-06
Online:2023-07-30
Contact:
LI Ruiqin
CLC Number:
PAN Wuxing, LI Ruiqin. A Configuration Synthesis Method of Reconfigurable and Decoupled Wheel-legged Mechanical Leg[J]. Acta Armamentarii, 2024, 45(8): 2658-2666.
Add to citation manager EndNote|Ris|BibTeX
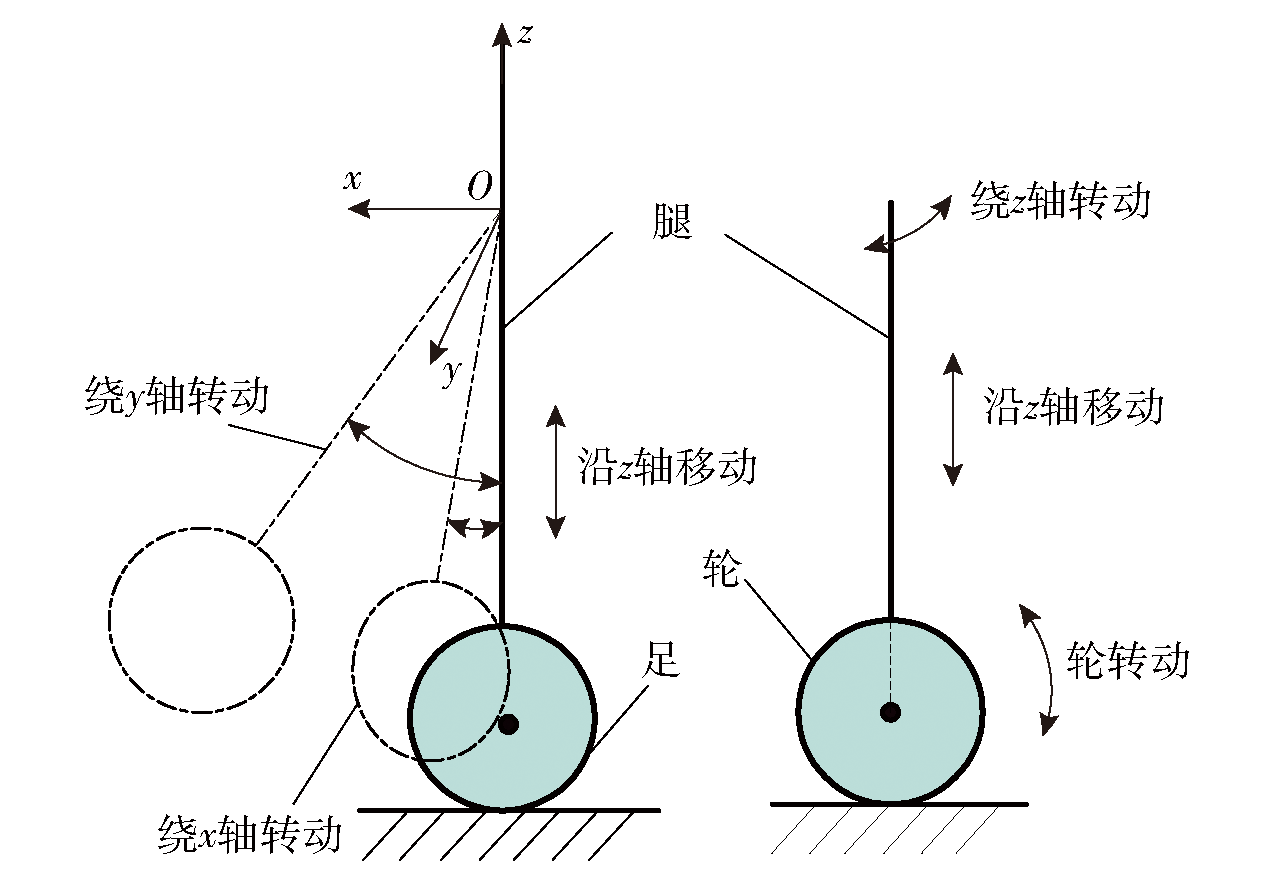
Fig.1 Wheel-legged structure and degree of freedom
| 主运动支链 | 构型 |
|---|---|
| 1 | RyRx |
| 2 | RxRy |
| 3 | Uxy |
| 4 | Rx |
| 5 | Ry |
Table 1 The configurations of main motion limb
| 主运动支链 | 构型 |
|---|---|
| 1 | RyRx |
| 2 | RxRy |
| 3 | Uxy |
| 4 | Rx |
| 5 | Ry |
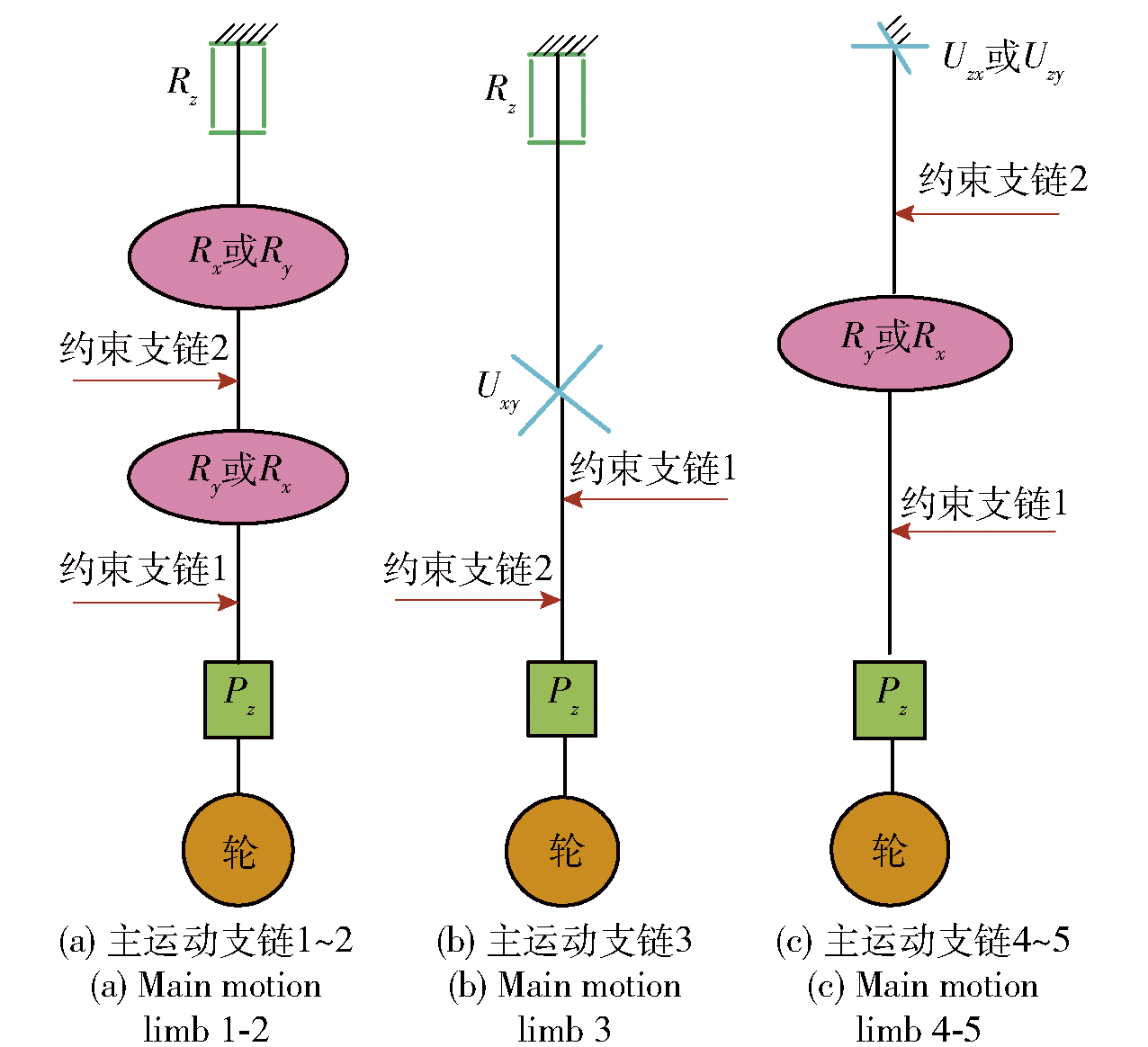
Fig.2 Arrangement of constraint limbs
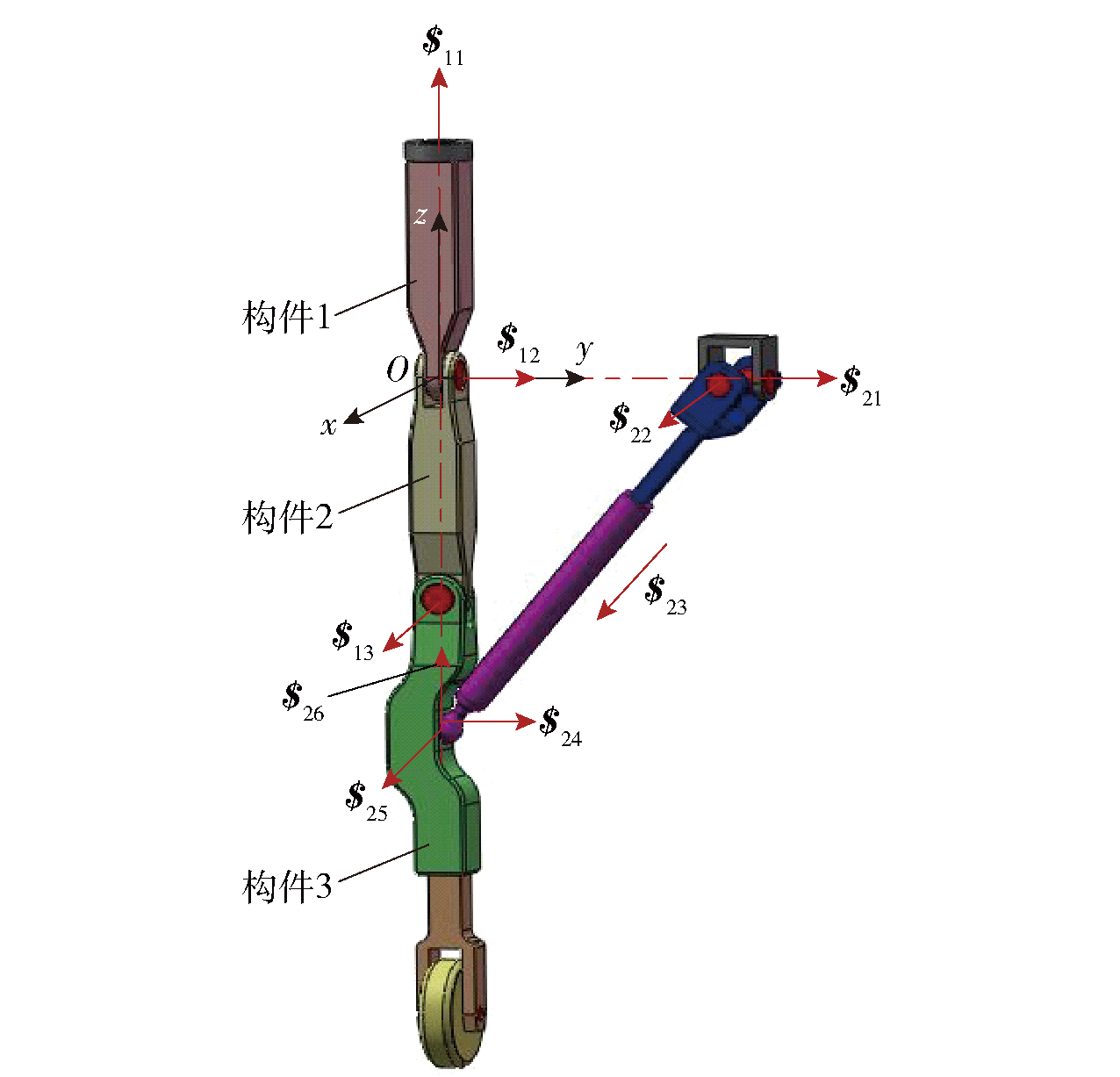
Fig.3 Main motion limb 1 and arrangement of unconstrained limb
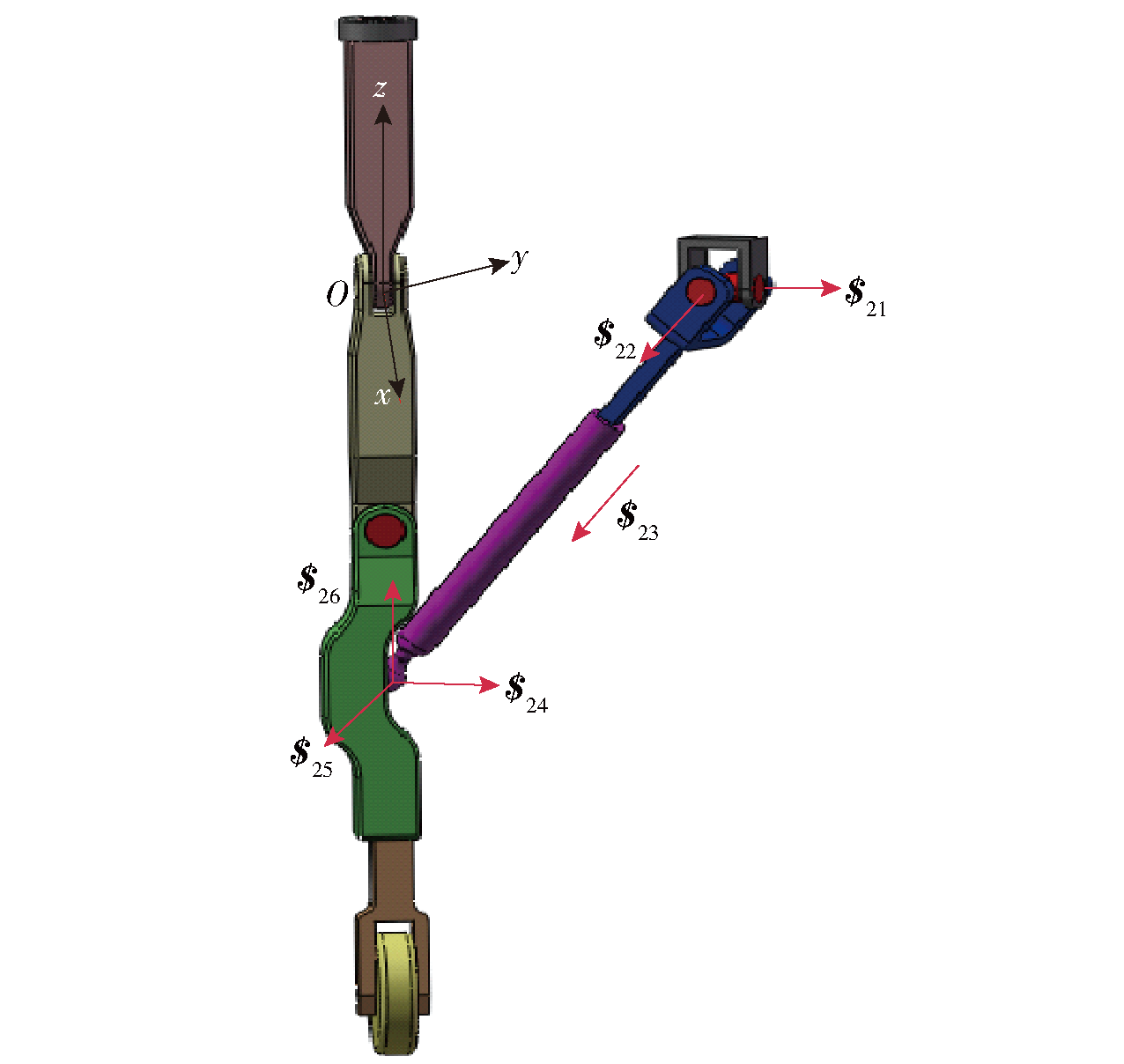
Fig.4 Rotation around z axis
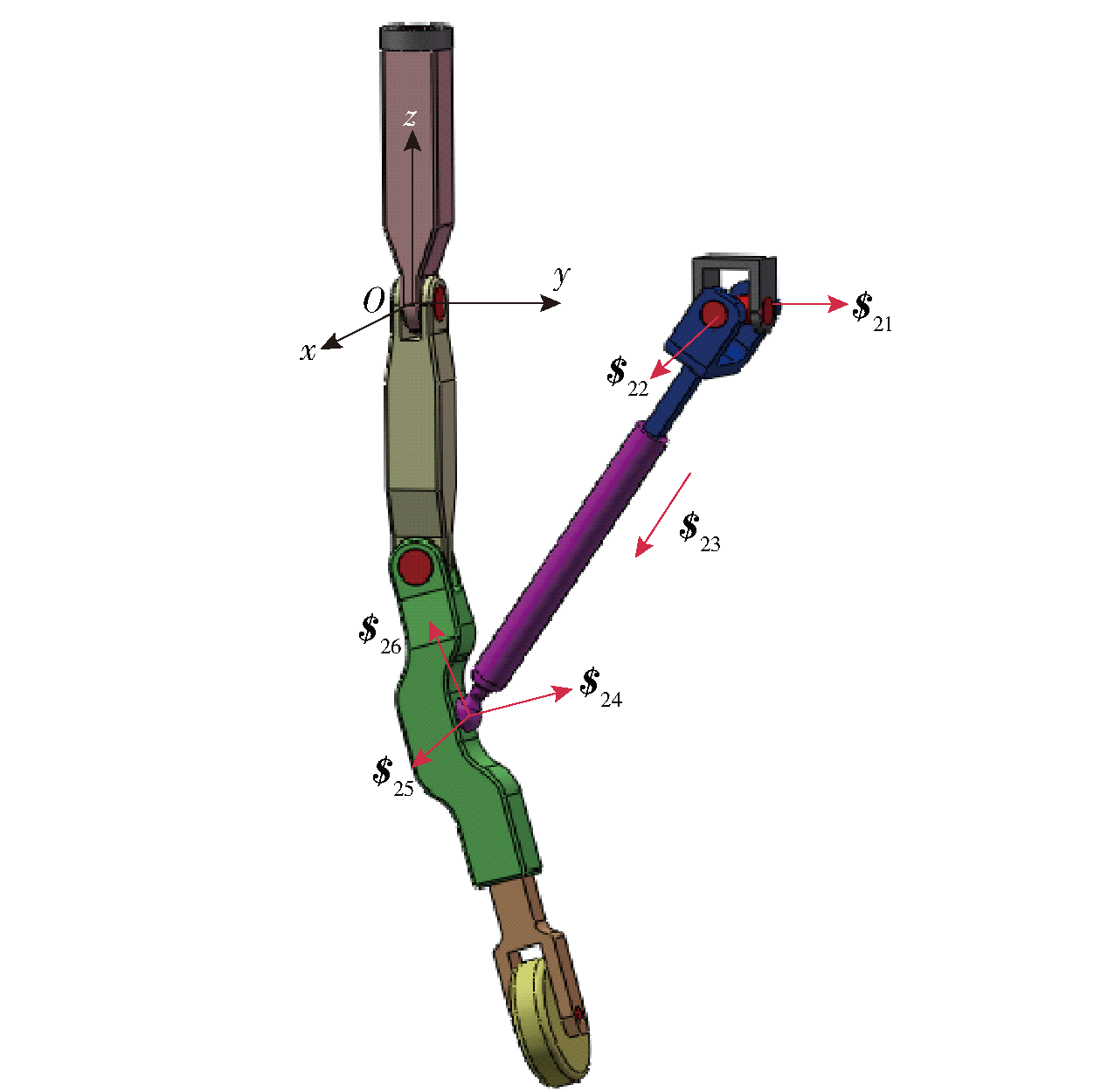
Fig.5 Rotation around x axis orientation
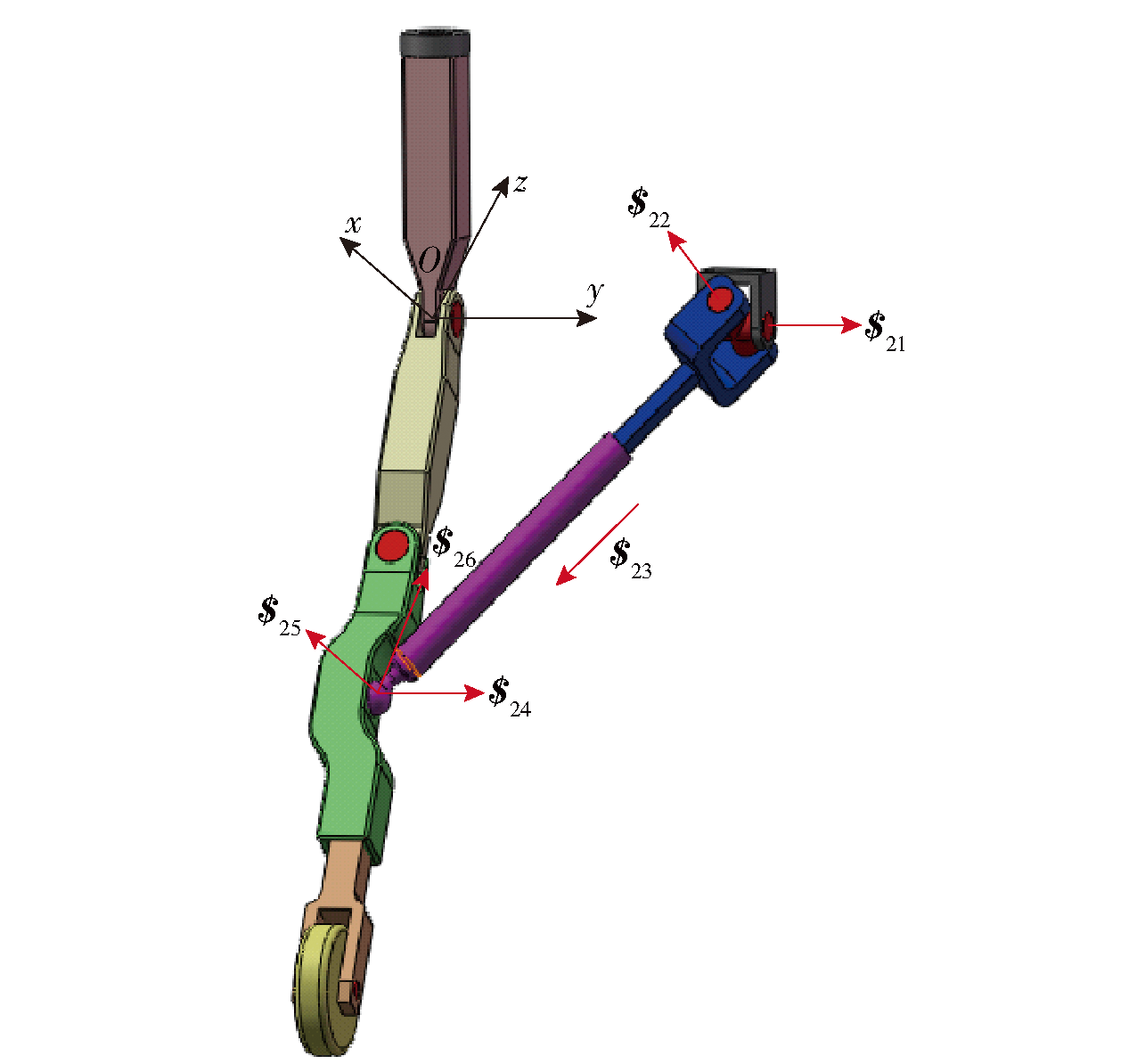
Fig.6 Rotation around y axis
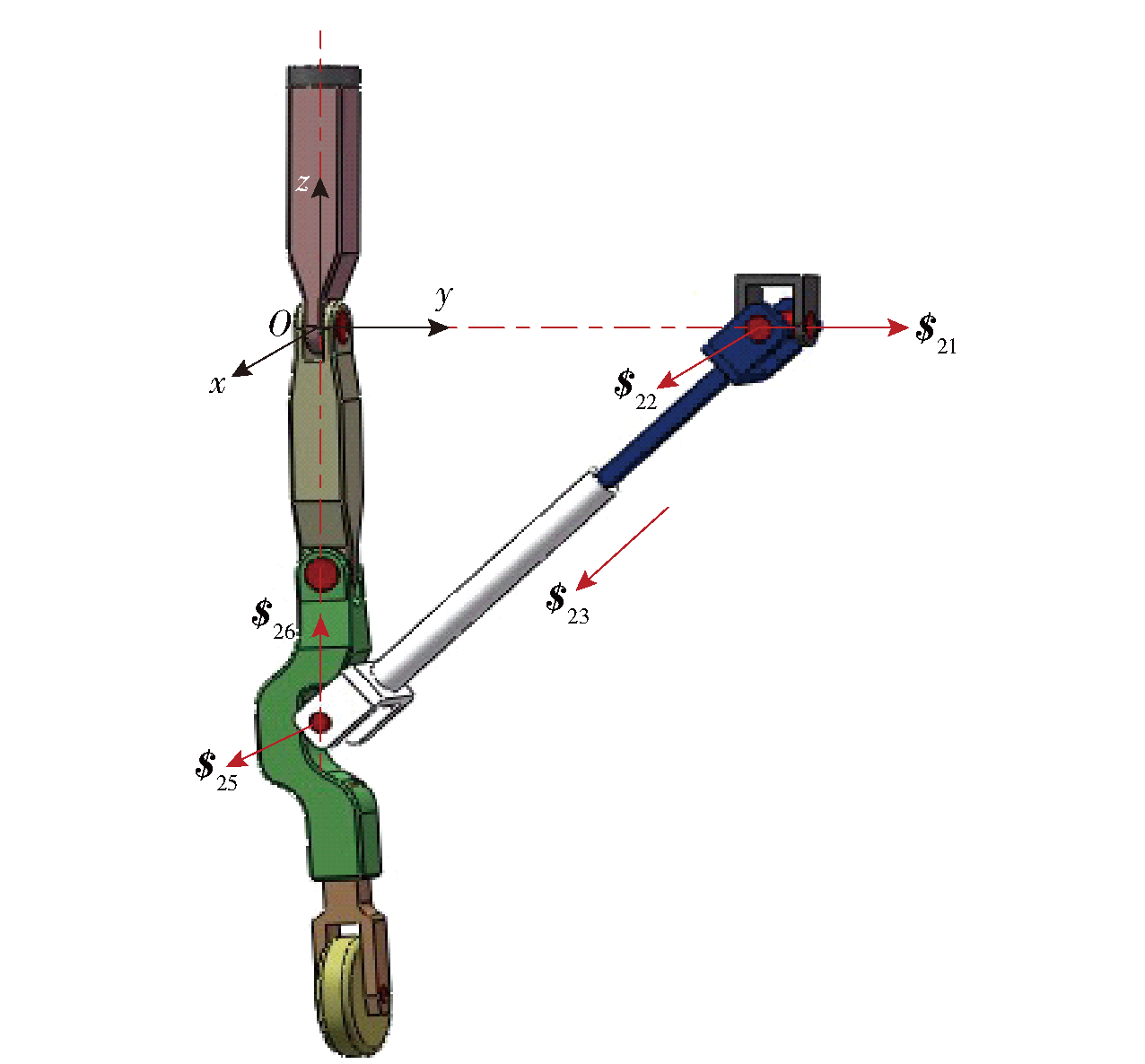
Fig.7 Configuration of UPU constraint limb
| 约束支链1构型 | 约束支链2构型 |
|---|---|
| Uyx' Uzx' Uyx' Rx'Rz RyRx' Rx'Rz | Uyx' Uzx' Uyz' Uzx' Uy'z' Uz'y' |
Table 2 Driving pair selection of partially constraint limbs
| 约束支链1构型 | 约束支链2构型 |
|---|---|
| Uyx' Uzx' Uyx' Rx'Rz RyRx' Rx'Rz | Uyx' Uzx' Uyz' Uzx' Uy'z' Uz'y' |

Fig.8 $\left(\left(\underline{R}_{z} R_{y}-U_{y^{\prime} z^{\prime}} \underline{P}_{x z} U_{z^{\prime} y^{\prime}}\right)+\left(R_{x}-U_{y x^{\prime}} \underline{P}_{z z} U_{z x^{\prime}}\right)\right)+\underline{P}_{z} \underline{R}_{\mathrm{a}}$ mechanical leg
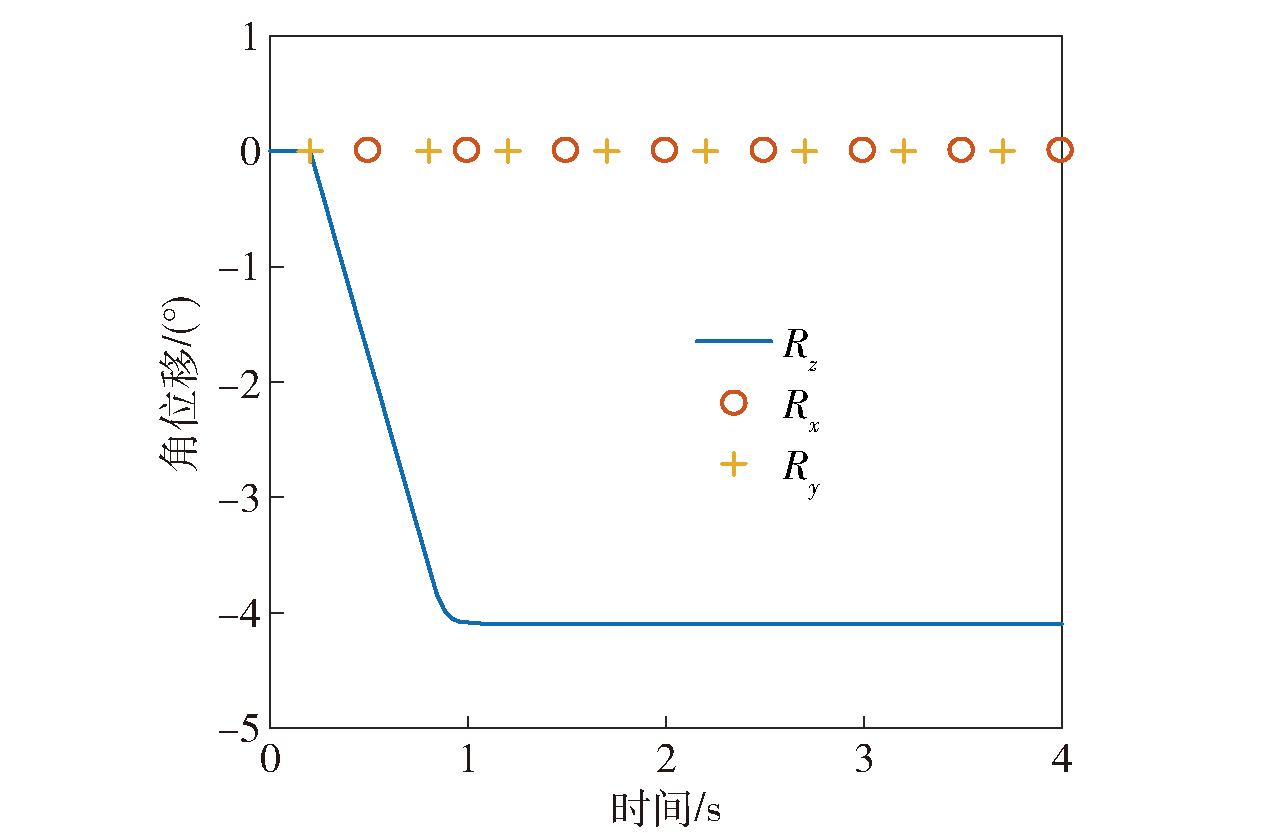
Fig.9 Reconfigurable verification in wheel mode
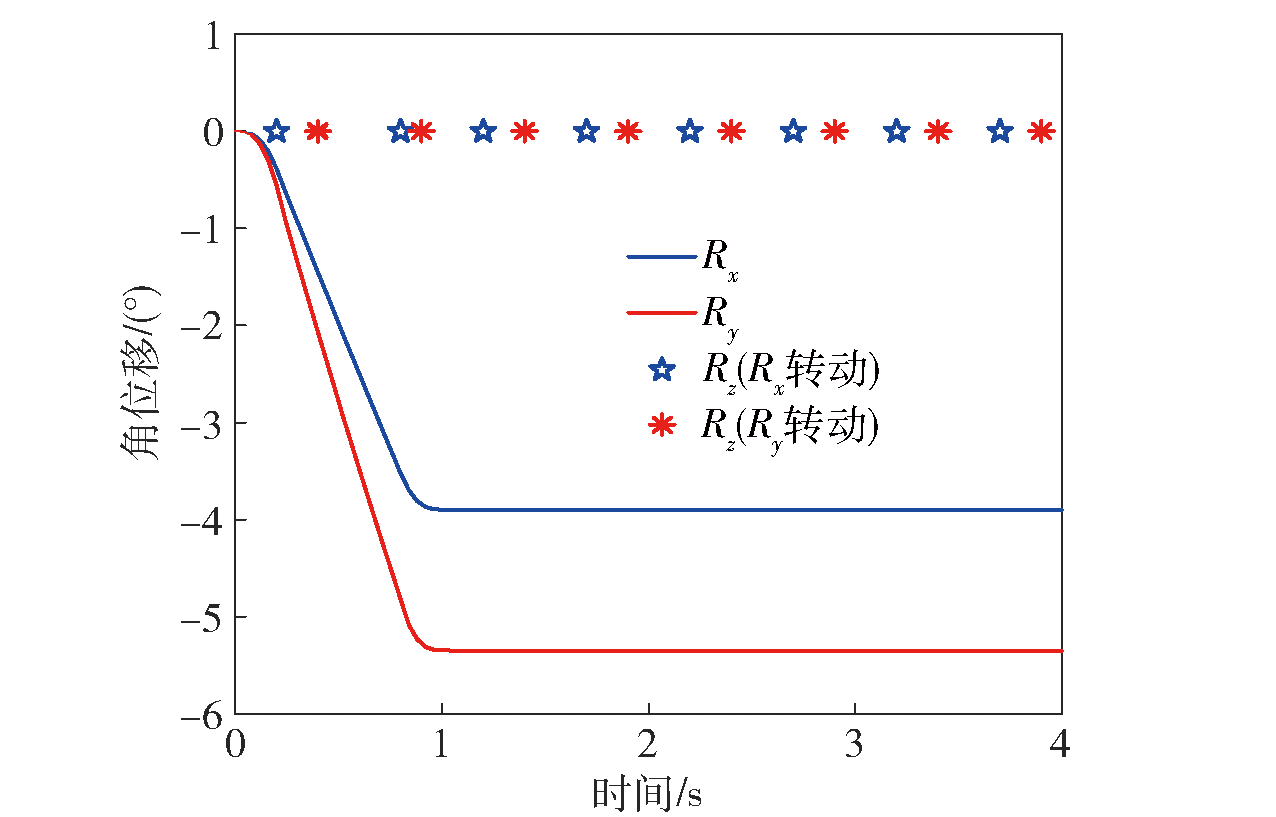
Fig.10 Reconfigurable verification in leg mode
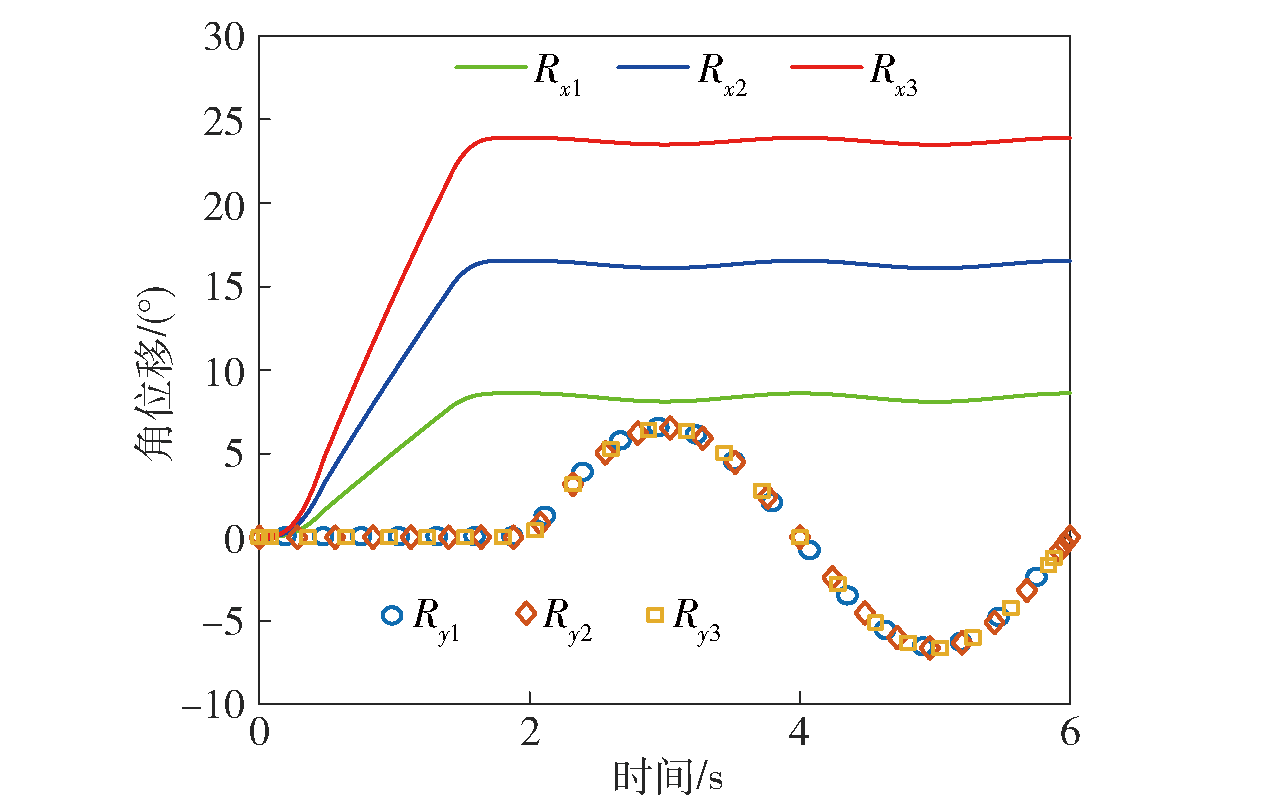
Fig.11 Decoupling verification
| [1] |
褚宏鹏, 祁柏, 王慧奇, 等. 六自由度轮式并联机器人及其构型方法[J]. 机械工程学报, 2023, 59(3): 46-53.
doi: 10.3901/JME.2023.03.046 |
|
doi: 10.3901/JME.2023.03.046 |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
张硕, 姚建涛, 许允斗, 等. 形态可重构移动机器人行走机构设计与分析[J]. 农业机械学报, 2019, 50(8): 418-426.
|
|
|
|
| [6] |
|
| [7] |
姜祎, 王挺, 邵沛瑶, 等. 一种轮腿复合型机器人的步态研究与越障性能分析[J]. 兵工学报, 2023, 44(1): 247-259.
doi: 10.12382/bgxb.2022.0823 |
|
doi: 10.12382/bgxb.2022.0823 |
|
| [8] |
|
| [9] |
|
| [10] |
董世豪. 基于魔方机构的轮腿式移动变胞机器人设计研究[D]. 秦皇岛: 燕山大学, 2022.
|
|
|
|
| [11] |
曲梦可, 王洪波, 荣誉. 轮腿混合机器人机械腿动力学建模与驱动预估[J]. 兵工学报, 2017, 38(8): 1619-1629.
doi: 10.3969/j.issn.1000-1093.2017.08.021 |
|
|
|
| [12] |
|
| [13] |
|
| [14] |
王修文, 汪首坤, 王军政, 等. 基于异形Stewart平台的电动并联式六轮足机器人[J]. 机械工程学报, 2020, 56(13): 84-92.
doi: 10.3901/JME.2020.13.084 |
|
doi: 10.3901/JME.2020.13.084 |
|
| [15] |
罗洋, 李奇敏, 温皓宇. 一种新型轮腿式机器人设计与分析[J]. 中国机械工程, 2013, 24(22): 3018-3023.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
张金柱. 易防护机械腿六足机器人机构学研究[D]. 秦皇岛: 燕山大学, 2022.
|
|
|
|
| [26] |
孙天宇. 具有并联机构腿的全向步行机器人设计研究[D]. 北京: 北京交通大学, 2022.
|
|
|
|
| [27] |
陈佳丽, 许勇, 刘文彩. 步行式加工机器人解耦并联机械腿构型综合[J]. 机械传动, 2019, 43(9): 41-49.
doi: 10.16578/j.issn.1004.2539.2019.09.007 |
|
doi: 10.16578/j.issn.1004.2539.2019.09.007 |
|
| [28] |
魏俊, 贾维涵, 刘承磊, 等. 驱动支链完全解耦的可重构踝关节康复并联机构型综合[J]. 机械工程学报, 2022, 58(19): 45-56.
doi: 10.3901/JME.2022.19.045 |
|
doi: 10.3901/JME.2022.19.045 |
|
| [29] |
|
| [1] | FAN Yong, WU Fan, LENG Zhengdong, YANG Guangdong, ZHAO Xiaohua. Peak Elimination Effect of Radial Uncoupled Charge on Explosion Pressure and Its Influence on Rock Fracture Range [J]. Acta Armamentarii, 2024, 45(1): 131-143. |
| [2] | GAO Quanxi, KE Wei, QIAO Haiyan. Underwater Vehicle Control Based on Linear Active Disturbance Rejection [J]. Acta Armamentarii, 2023, 44(3): 783-791. |
| [3] | LI Wei, HAN Chongwei, LIU Aifeng, REN Haibo, HU Xin, JIANG Junfeng. Modeling and Simulation of Self-stable Gun Line Control Using Interference Rate Compesation [J]. Acta Armamentarii, 2022, 43(6): 1233-1245. |
| [4] | ZHANG Jie, MA Xiaojun, LIU Chunguang, YUAN Dong, ZHANG Yunyin. Feedback Linearization Decoupling and Predictive Driving Control for Dual Independent Electric Drive Tracked Vehicle [J]. Acta Armamentarii, 2021, 42(4): 697-705. |
| [5] | CHEN Wei, SUN Chuan-jie, LI Yong-ze, BAI Yun-shan. Design of Decoupling Controller for Spinning Fin Stabilized Projectile Based on Off-line Predictive Control [J]. Acta Armamentarii, 2018, 39(5): 901-909. |
| [6] | GAI Jiang-tao, HUANG Shou-dao , ZHOU Guang-ming, LIU Yi, MA Tian. Adaptive Sliding Mode Steering Control of Double Motor Coupling Drive Transmission for Tracked Vehicle [J]. Acta Armamentarii, 2015, 36(3): 405-411. |
| [7] | SONG Tao, LIN De-fu, WEI Zhi-jun, LI Chuan. Research on Decoupling Algorithm for Control Coupling of a Spinning Missile Autopilot [J]. Acta Armamentarii, 2014, 35(4): 454-460. |
| [8] | ZHANG Xi-yong, WANG Shu-zong, LI Zong-j. A Method of Navigating Pose Controlling System Design for Underwater Vehicle Based on Variable Structure Control [J]. Acta Armamentarii, 2013, 34(3): 301-309. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||