
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (1): 279-289.doi: 10.12382/bgxb.2021.0827
Special Issue: 特种车辆理论与技术
Previous Articles Next Articles
LIU Longlong, CHEN Huiyan, LIU Hai’ou*( ), GUAN Haijie, LU Jiaxing
), GUAN Haijie, LU Jiaxing
Received:2021-12-04
Online:2022-08-29
Contact:
LIU Hai’ou
CLC Number:
LIU Longlong, CHEN Huiyan, LIU Hai’ou, GUAN Haijie, LU Jiaxing. Path Replanning of Multi-speed Unmanned Tracked Platforms Based on Topological Road Network[J]. Acta Armamentarii, 2023, 44(1): 279-289.
Add to citation manager EndNote|Ris|BibTeX
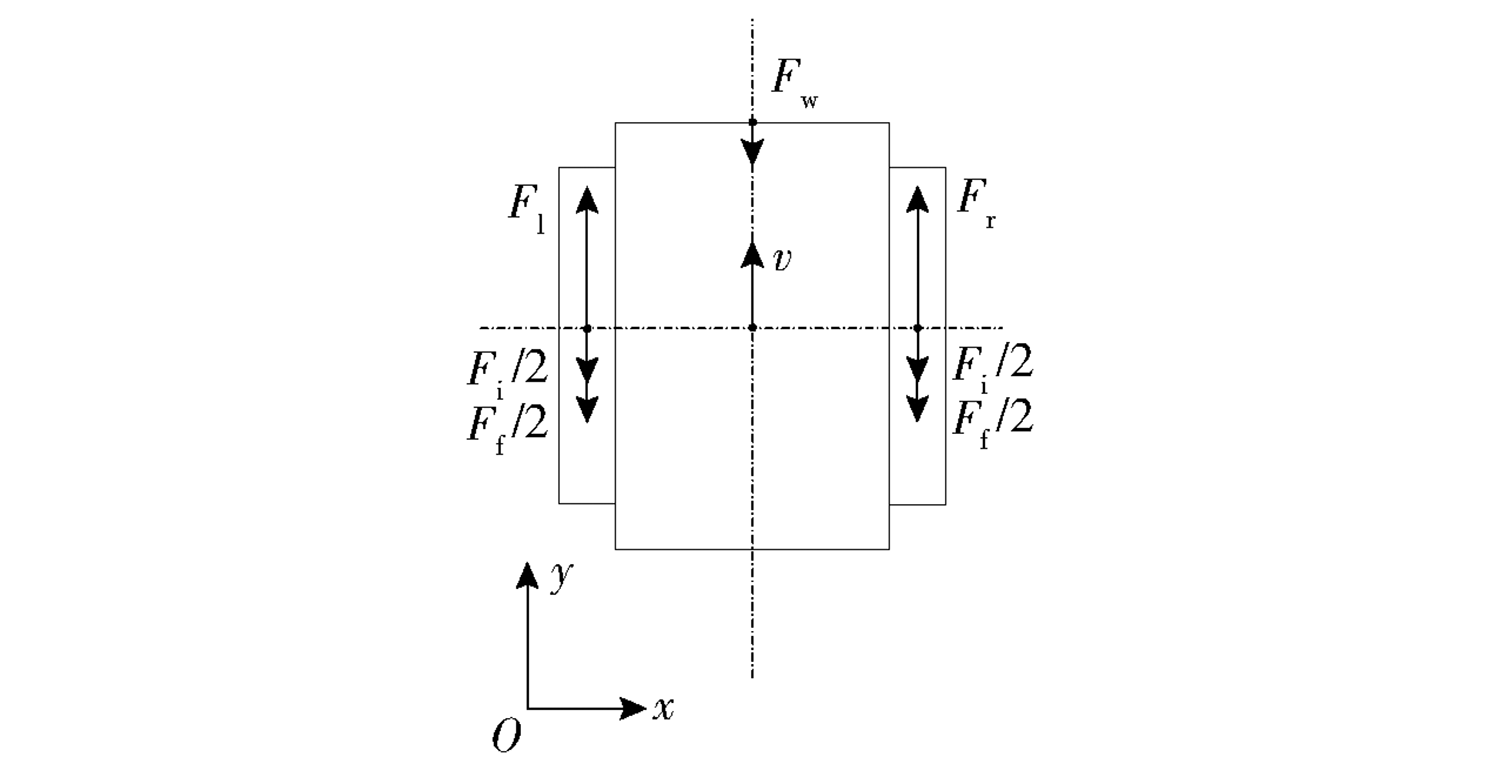
Fig.1 Dynamic model of the platform
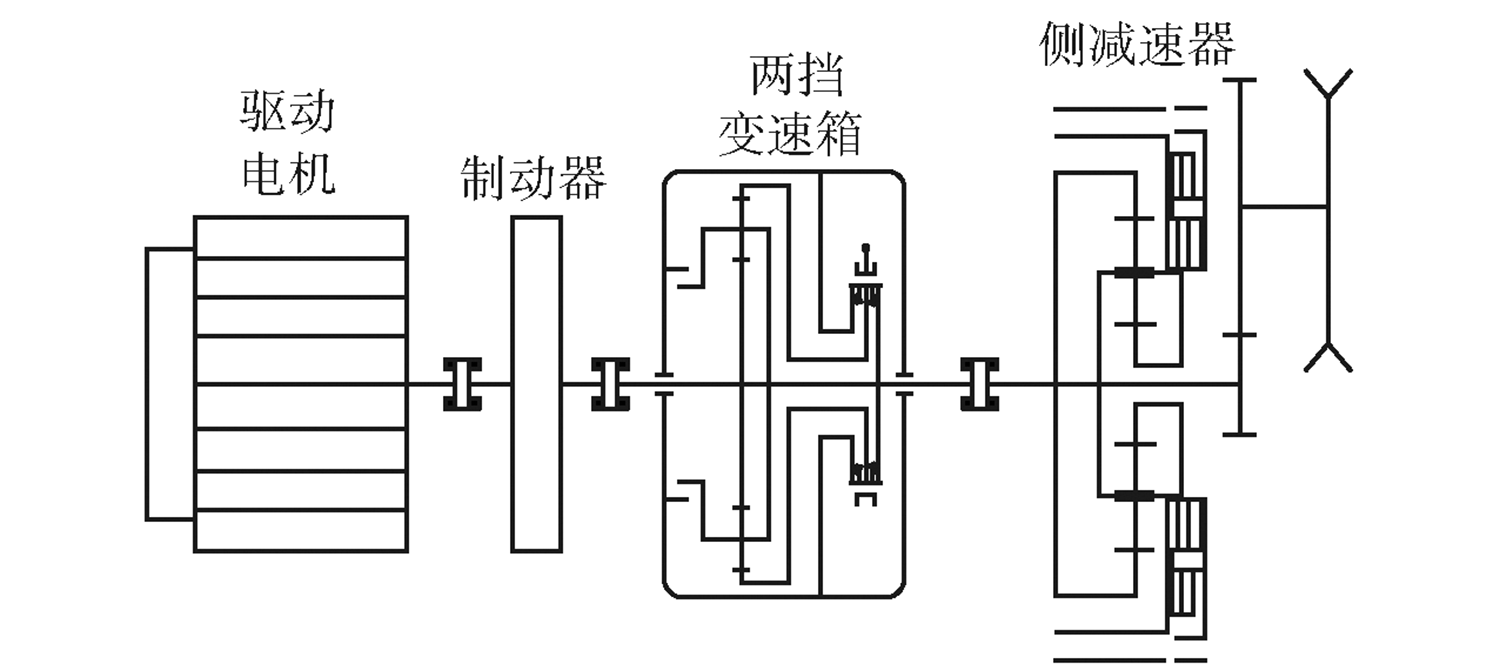
Fig.2 Single-sided structure of the platform-driven system
| 参数 | 数值 |
|---|---|
| 长L×宽W×高H/mm | 5476×2978×1800 |
| 质量m/kg | 9360 |
| 电机峰值功率/kW | 110 |
| 电机峰值转矩/(N·m) | 800 |
| 电机持续转矩/(N·m) | 500 |
| i0 | 5.5 |
| ig | 2.7/1 |
| r/mm | 265 |
Table 1 Parameters of the unmanned tracked platform system
| 参数 | 数值 |
|---|---|
| 长L×宽W×高H/mm | 5476×2978×1800 |
| 质量m/kg | 9360 |
| 电机峰值功率/kW | 110 |
| 电机峰值转矩/(N·m) | 800 |
| 电机持续转矩/(N·m) | 500 |
| i0 | 5.5 |
| ig | 2.7/1 |
| r/mm | 265 |
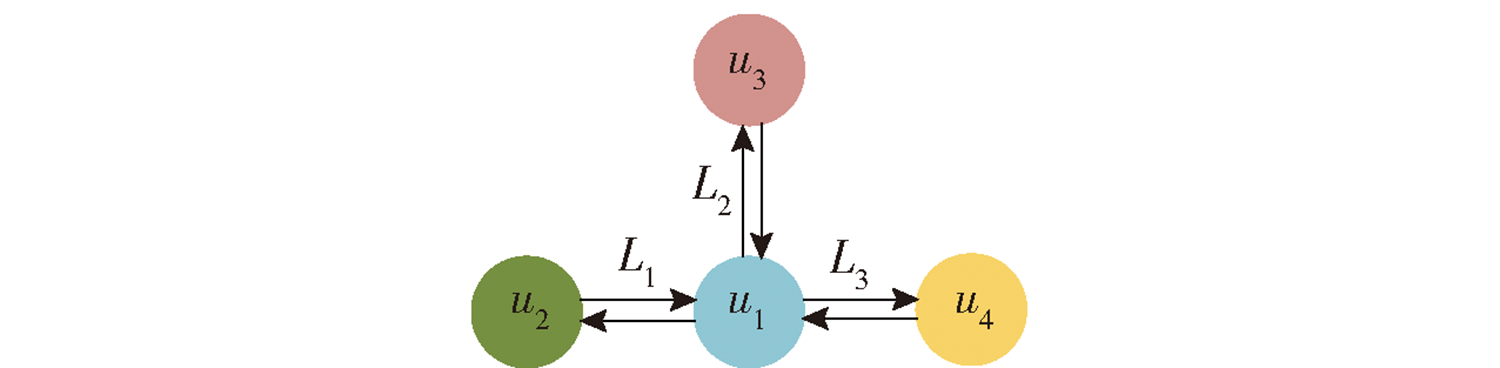
Fig.3 Global bidirectional diagram
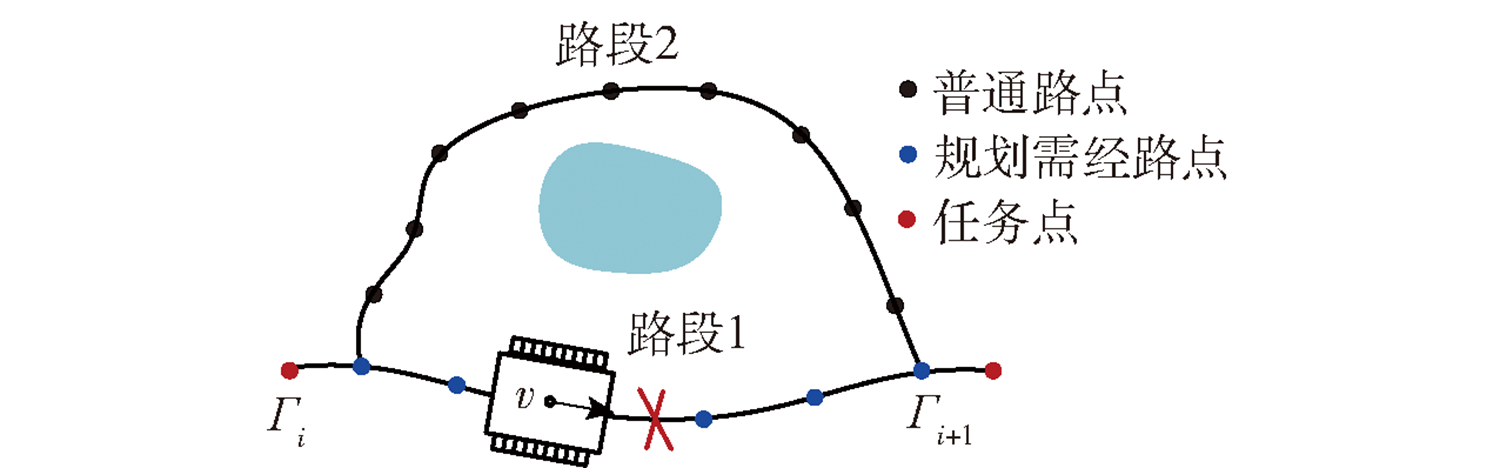
Fig.4 Replanning scenario when roads are blocked
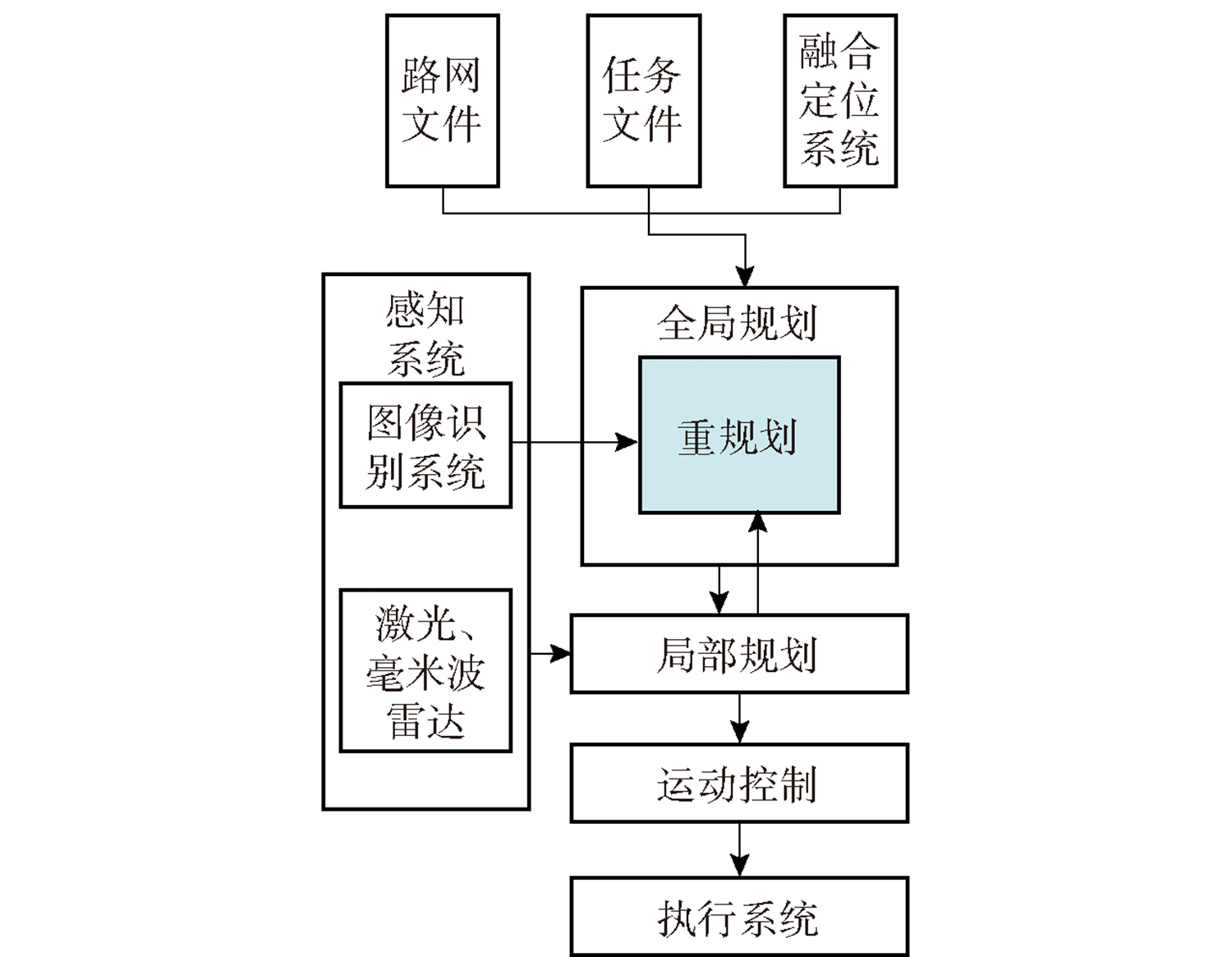
Fig.5 Block diagram of the replanning triggering module
| 参数 | 数值 |
|---|---|
| l/m | 40 |
| Dh/m | 8 |
| N/次 | 20 |
| Dm/m | 5 |
| Twait/s | 3 |
Table 2 Parameters of the replanning triggering process
| 参数 | 数值 |
|---|---|
| l/m | 40 |
| Dh/m | 8 |
| N/次 | 20 |
| Dm/m | 5 |
| Twait/s | 3 |
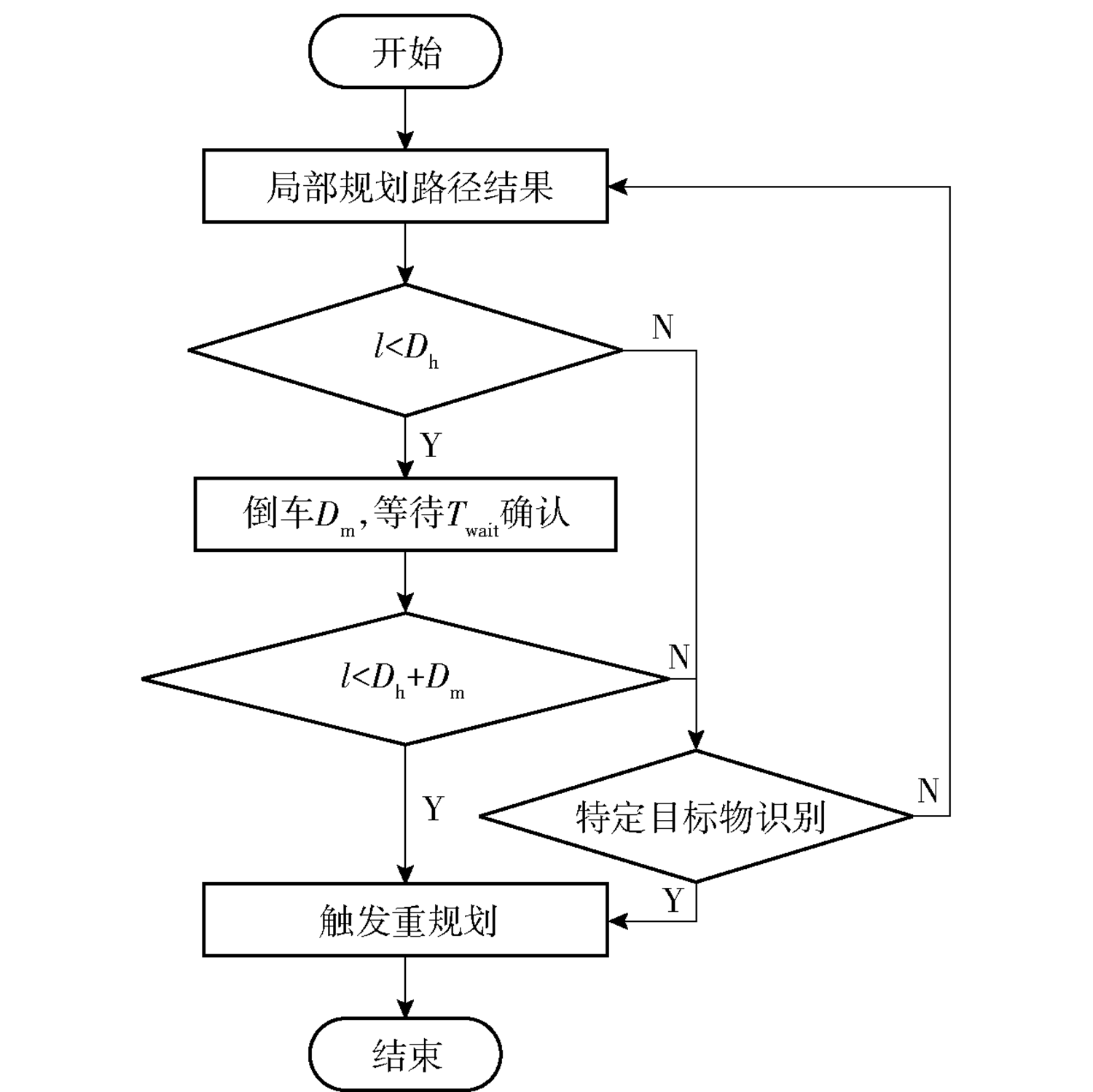
Fig.6 Flow chart of replanning triggering

Fig.7 Topological relationship interruption strategy in replanning inreplanning
| 子目标参数 | 熵权ej | 重要性比rj | 权重vj |
|---|---|---|---|
| P1 | 0.9557 | 1.0441 | 0.32 |
| P2 | 0.9978 | 1.0000 | 0.55 |
| P3 | 0.9435 | 1.0129 | 0.13 |
Table 3 Entropy method assignment results
| 子目标参数 | 熵权ej | 重要性比rj | 权重vj |
|---|---|---|---|
| P1 | 0.9557 | 1.0441 | 0.32 |
| P2 | 0.9978 | 1.0000 | 0.55 |
| P3 | 0.9435 | 1.0129 | 0.13 |

Fig.8 Test platform with subsystems

Fig.9 Satellite image of the test site

Fig.10 Replanning triggered and executed
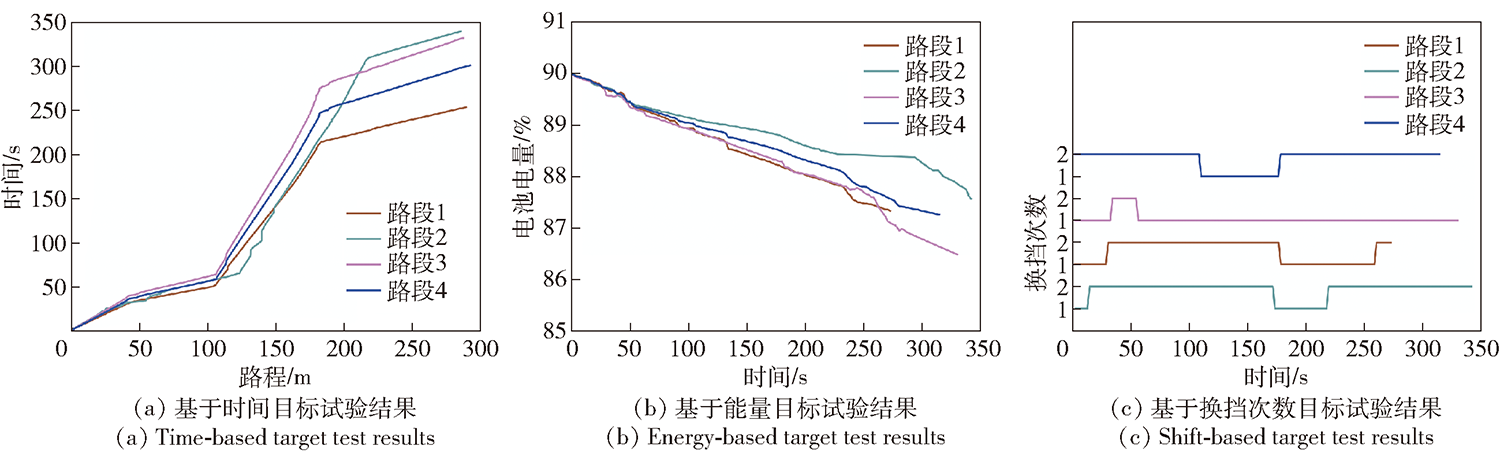
Fig.11 Comparison of single-target results for different road sections

Fig.12 Results of path replanning using single parameter

Fig.13 Replanning path using multiple parameters
| 路段 | 时间/s | 能量/% | 换挡次数 | 综合结果 |
|---|---|---|---|---|
| 路段1 | 278 | 2.65 | 3 | 0.8104 |
| 路段2 | 341 | 2.42 | 3 | 0.8295 |
| 路段3 | 300 | 3.50 | 2 | 0.9187 |
| 路段4 | 309 | 2.53 | 2 | 0.7743 |
Table 4 Results of the entropy method for different roads
| 路段 | 时间/s | 能量/% | 换挡次数 | 综合结果 |
|---|---|---|---|---|
| 路段1 | 278 | 2.65 | 3 | 0.8104 |
| 路段2 | 341 | 2.42 | 3 | 0.8295 |
| 路段3 | 300 | 3.50 | 2 | 0.9187 |
| 路段4 | 309 | 2.53 | 2 | 0.7743 |
| [1] |
陈慧岩, 张玉. 军用地面无人机动平台技术发展综述[J]. 兵工学报, 2014, 35(10):1696-1706.
doi: 10.3969/j.issn.1000-1093.2014.10.026 |
|
|
|
| [2] |
|
| [3] |
张晓晔, 谢志文, 吴晖. 基于时间栅格法和最优搜索的电网巡检机器人避障路径规划方法[J]. 机械与电子, 2021, 39(9):71-75.
|
|
|
|
| [4] |
|
| [5] |
朱杰, 鲁艺, 张辉明. 突发威胁情况下的无人机航迹重规划[J]. 计算机工程与应用, 2018, 54(8):255-259.
doi: 10.3778/j.issn.1002-8331.1709-0345 |
|
doi: 10.3778/j.issn.1002-8331.1709-0345 |
|
| [6] |
邹启杰, 刘世慧, 张跃. 基于强化学习的快速探索随机树特殊环境中路径重规划算法[J]. 控制理论与应用, 2020, 37(8):1737-1748.
|
|
|
|
| [7] |
房立金, 吴政翰, 王怀震. 基于改进RRT*FN算法的机械臂多场景运动规划[J]. 中国机械工程, 2021, 32(21):2590-2597.
|
|
doi: 10.3969/j.issn.1004-132X.2021.21.008 |
|
| [8] |
丛玉华, 赵宗豪, 邢长达, 等. 基于改进人工势场的无人机动态避障路径规划[J]. 兵器装备工程学报, 2021, 42(9):170-176.
|
|
|
|
| [9] |
朱大奇, 刘雨, 孙兵, 等. 自治水下机器人的自主启发式生物启发神经网络路径规划算法[J]. 控制理论与应用, 2019, 36(2):183-191.
|
|
|
|
| [10] |
孙鹏耀, 黄炎焱, 潘尧. 基于改进势场法的移动机器人路径规划[J]. 兵工学报, 2020, 41(10):2106-2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
| [11] |
赵梓烨, 刘海鸥, 陈慧岩. 分布式电驱动无人高速履带车辆越野环境轨迹预测方法研究[J]. 兵工学报, 2019, 40(4):680-688.
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.002 |
|
| [12] |
赵屹东, 陈慧岩, 胡家铭. 双侧独立电驱动履带车辆自动机械变速器线控换挡控制方法[J]. 兵工学报, 2021, 42(3):459-467.
doi: 10.3969/j.issn.1000-1093.2021.03.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.03.002 |
|
| [13] |
于泉, 姚宗含. 动态重规划的多目标路径产生方法研究[J]. 交通运输工程与信息学报, 2019, 17(4):105-112.
|
|
|
|
| [14] |
魏唯, 欧阳丹彤, 吕帅, 等. 动态不确定环境下多目标路径规划方法[J]. 计算机学报, 2011, 34(5):836-846.
|
|
doi: 10.3724/SP.J.1016.2011.00836 URL |
|
| [15] |
李刚, 张明, 宋兆杰, 等. 基于标准差修正G1组合赋权的科技评价模型及实证[J]. 科技管理研究, 2011, 31(20):47-50,58.
|
|
|
|
| [16] |
孙伟, 赵耀, 华玉龙. 无人履带装甲车的速度控制策略[J]. 制造业自动化, 2015, 37(9):49-51.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
胡毓达. 实用多目标最优化[M]. 上海: 上海科学技术出版社, 1990.
|
|
|
|
| [20] |
doi: 10.1109/ACCESS.2018.2845448 URL |
| [1] | XIAO Wangang, ZHOU Yunbo, FU Yaoyu, ZHANG Ming, ZHOU Jun, GE Jitao. Analysis of the Influence of Soil on the Maneuverability of Military Off-road Vehicles [J]. Acta Armamentarii, 2024, 45(1): 288-298. |
| [2] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [3] | XU Wei, SU Bo, JIANG Lei, YAN Tong, XU Peng, WANG Zhirui, QIU Tianqi. Key Technologies and Application Prospects of Off-road Legged Robot Swarm System [J]. Acta Armamentarii, 2023, 44(9): 2568-2579. |
| [4] | TIAN Hongqing, WANG Jianqiang, HUANG Heye, DING Feng. Probabilistic Roadmap Method for Path Planning of Intelligent Vehicle Based on Artificial Potential Field Model in Off-roadEnvironment [J]. Acta Armamentarii, 2021, 42(7): 1496-1505. |
| [5] | LI Chunming, WU Wei, GUO Zhiqiang, YUAN Shihua, CHEN Si. Longitudinal and Vertical Coupled Dynamic Model and Power Characteristics of Tracked Vehicle [J]. Acta Armamentarii, 2021, 42(3): 449-458. |
| [6] | CHEN Jinshi, LIU Siyuan, WANG Tongjian, HUO Dongyang, ZHANG Meirong, ZHANG Fei. Design and Performance of Electro-hydraulic Full Hydraulic Brake System for 8×8 All-electric Drive Off-road Vehicle [J]. Acta Armamentarii, 2021, 42(2): 422-429. |
| [7] | LIU Cong, LIU Hui, HAN Lijin, CHEN Ke. High-speed Obstacle Avoidance and Stability Control of Distributed Electric Drive Vehicle under Extreme Off-road Conditions [J]. Acta Armamentarii, 2021, 42(10): 2102-2113. |
| [8] | XU Weipan, ZENG Haiyang, JIANG Chao, KOU Xizheng, ZANG Mengyan. Simulation of Tractive Performance of Off-road Tire on Gravel Road by Combined Finite Element-discrete ElementMethod and Experimental Validation [J]. Acta Armamentarii, 2019, 40(9): 1961-1968. |
| [9] | XU Shaohang, XI Junqiang, CHEN Huiyan. Energy Management of Hybrid Electric Tracked Vehicle Based on Off-road Condition Prediction [J]. Acta Armamentarii, 2019, 40(8): 1572-1579. |
| [10] | ZHAO Ziye, LIU Haiou, CHEN Huiyan. Research on Trajectory Prediction Method of Distributed High Speed Electric Drive Unmanned Tracked Vehicle in Off-roadConditions [J]. Acta Armamentarii, 2019, 40(4): 680-688. |
| [11] | LIU Zhongze, CHEN Huiyan, CUI Xing, XIONG Guangming, WANG Yuchun, TAO Yi. Real-time LiDAR SLAM in Off-road Environment for UGV [J]. Acta Armamentarii, 2019, 40(12): 2399-2406. |
| [12] | HUANG Mian-dun, ZHANG Fu-jun, CUI Tao, LIU Xue-yuan. Research on the Starting Response of Heavy-duty Off-road Vehicle on Plateau [J]. Acta Armamentarii, 2016, 37(10): 1915-1925. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||