
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (7): 1881-1895.doi: 10.12382/bgxb.2022.0152
Previous Articles Next Articles
HAN Yu1, SONG Tao1, ZHENG Duo1,*( ), LIU Xin2
), LIU Xin2
Received:2022-03-11
Online:2023-07-30
Contact:
ZHENG Duo
HAN Yu, SONG Tao, ZHENG Duo, LIU Xin. Unmanned Aerial Vehicle Cluster Cooperative Guidance Technology Based on Conflict Trigger Mechanism[J]. Acta Armamentarii, 2023, 44(7): 1881-1895.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Aircraft collision avoidance process

Fig.2 Schematic diagram of UAV collision

Fig.3 Angle tracking process

Fig.4 Tangent constraint diagram

Fig.5 Tangent constraint solution

Fig.6 Maneuver strategy selection

Fig.7 Unsolvable case

Fig.8 Cooperation and collision avoidance process
| 飞行器 编号 | 飞行器初始状态 | 目标位置/m | |
|---|---|---|---|
| 位置/m | 速度/(m·s-1) | ||
| U1 | [7000,3500] | 100 | [0,3500] |
| U2 | [6331,5558] | 100 | [668,1443] |
| U3 | [4582,6829] | 100 | [2418,171] |
| U4 | [2418,6829] | 100 | [4582,171] |
| U5 | [668,5557] | 100 | [6332,1443] |
| U6 | [0,3500] | 100 | [7000,3500] |
| U7 | [668,1443] | 100 | [6332,5557] |
| U8 | [2418,171] | 100 | [4582,6829] |
| U9 | [4582,171] | 100 | [2418,6829] |
| U10 | [6332,1443] | 100 | [668,5557] |
Table 1 Initial conditionsof UAV clusters and decentralized fixed targets
| 飞行器 编号 | 飞行器初始状态 | 目标位置/m | |
|---|---|---|---|
| 位置/m | 速度/(m·s-1) | ||
| U1 | [7000,3500] | 100 | [0,3500] |
| U2 | [6331,5558] | 100 | [668,1443] |
| U3 | [4582,6829] | 100 | [2418,171] |
| U4 | [2418,6829] | 100 | [4582,171] |
| U5 | [668,5557] | 100 | [6332,1443] |
| U6 | [0,3500] | 100 | [7000,3500] |
| U7 | [668,1443] | 100 | [6332,5557] |
| U8 | [2418,171] | 100 | [4582,6829] |
| U9 | [4582,171] | 100 | [2418,6829] |
| U10 | [6332,1443] | 100 | [668,5557] |

Fig.9 Trajectory of UAVs with decentralized fixed targets

Fig.10 Shortest distance between aircrafts when attacking fixed targets
| 飞行器 编号 | 分配的 目标 | 机间最短 距离/m | 到达时间/ s | 脱靶量/ m |
|---|---|---|---|---|
| U1 | T1 | 30.8043 | 68 | 0.9325 |
| U2 | T2 | 30.7672 | 68 | 0.9323 |
| U3 | T3 | 30.7672 | 68 | 0.9323 |
| U4 | T4 | 30.7735 | 68 | 0.9324 |
| U5 | T5 | 30.7735 | 68 | 0.9322 |
| U6 | T6 | 30.8009 | 68 | 0.9322 |
| U7 | T7 | 30.7958 | 68 | 0.9323 |
| U8 | T8 | 30.7958 | 68 | 0.9324 |
| U9 | T9 | 30.7969 | 68 | 0.9324 |
| U10 | T10 | 30.8043 | 68 | 0.9235 |
Table 2 Cooperative attack results of multiple UAV clusters on decentralized fixed targets
| 飞行器 编号 | 分配的 目标 | 机间最短 距离/m | 到达时间/ s | 脱靶量/ m |
|---|---|---|---|---|
| U1 | T1 | 30.8043 | 68 | 0.9325 |
| U2 | T2 | 30.7672 | 68 | 0.9323 |
| U3 | T3 | 30.7672 | 68 | 0.9323 |
| U4 | T4 | 30.7735 | 68 | 0.9324 |
| U5 | T5 | 30.7735 | 68 | 0.9322 |
| U6 | T6 | 30.8009 | 68 | 0.9322 |
| U7 | T7 | 30.7958 | 68 | 0.9323 |
| U8 | T8 | 30.7958 | 68 | 0.9324 |
| U9 | T9 | 30.7969 | 68 | 0.9324 |
| U10 | T10 | 30.8043 | 68 | 0.9235 |
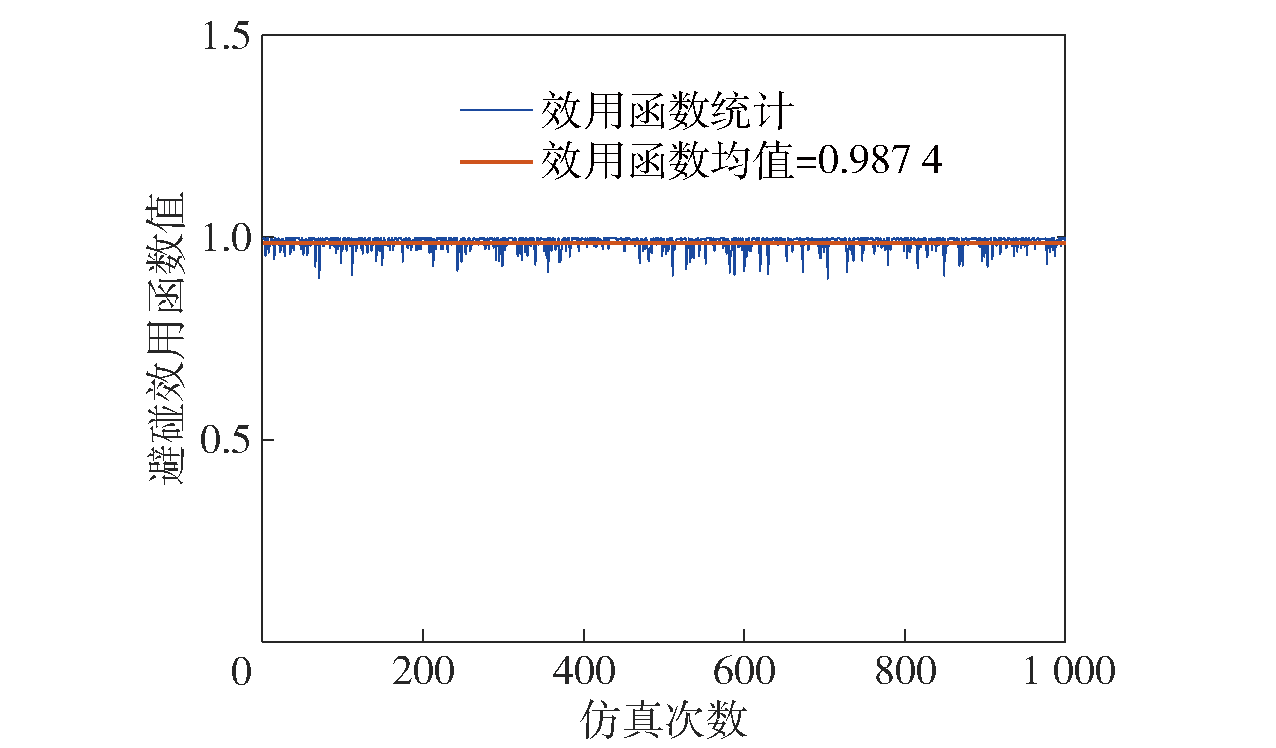
Fig.11 Statistical results of the utility function of fixed targets hit 1000 times
| 飞行器 编号 | 飞行器初始状态 | 分配 的目 标 | 目标参数 | ||
|---|---|---|---|---|---|
| 位置/m | 速度/ (m·s-1) | 位置/m | 速度/ (m·s-1) | ||
| U1 | [1052,146] | 117 | T5 | [8161,1024] | 30 |
| U2 | [958,1587] | 117 | T8 | [8593,774] | 30 |
| U3 | [957,314] | 116 | T4 | [8161,525] | 30 |
| U4 | [1138,690] | 116 | T1 | [7296,1024] | 30 |
| U5 | [698,675] | 112 | T2 | [7728,774] | 30 |
| U6 | [526,1318] | 118 | T6 | [8161,1523] | 30 |
| U7 | [314,316] | 112 | T9 | [8593,1274] | 30 |
| U8 | [1003,708] | 114 | T7 | [8593,275] | 30 |
| U9 | [291,681] | 119 | T10 | [8593,1773] | 30 |
| U10 | [794,1430] | 119 | T3 | [7728,1274] | 30 |
Table 3 Initial conditions of UAV clusters and formation moving targets
| 飞行器 编号 | 飞行器初始状态 | 分配 的目 标 | 目标参数 | ||
|---|---|---|---|---|---|
| 位置/m | 速度/ (m·s-1) | 位置/m | 速度/ (m·s-1) | ||
| U1 | [1052,146] | 117 | T5 | [8161,1024] | 30 |
| U2 | [958,1587] | 117 | T8 | [8593,774] | 30 |
| U3 | [957,314] | 116 | T4 | [8161,525] | 30 |
| U4 | [1138,690] | 116 | T1 | [7296,1024] | 30 |
| U5 | [698,675] | 112 | T2 | [7728,774] | 30 |
| U6 | [526,1318] | 118 | T6 | [8161,1523] | 30 |
| U7 | [314,316] | 112 | T9 | [8593,1274] | 30 |
| U8 | [1003,708] | 114 | T7 | [8593,275] | 30 |
| U9 | [291,681] | 119 | T10 | [8593,1773] | 30 |
| U10 | [794,1430] | 119 | T3 | [7728,1274] | 30 |

Fig.12 Trajectory of UAVs with decentralized formation moving targets

Fig.13 Shortest distance between aircrafts when attacking formation moving targets
| 飞行器 编号 | 打击的 目标 | 机间最短 距离/m | 到达时间/ s | 脱靶量/ m |
|---|---|---|---|---|
| U1 | T5 | 170.8413 | 52.7156 | 0.8003 |
| U2 | T8 | 30.3548 | 52.7175 | 0.8848 |
| U3 | T4 | 30.3548 | 52.7138 | 0.4068 |
| U4 | T1 | 188.3557 | 52.7194 | 0.2794 |
| U5 | T2 | 99.0358 | 52.7150 | 0.9716 |
| U6 | T6 | 38.1245 | 52.7306 | 0.5067 |
| U7 | T9 | 30.9024 | 52.7194 | 0.3841 |
| U8 | T7 | 249.4957 | 52.7144 | 0.5970 |
| U9 | T10 | 91.5536 | 52.7338 | 0.8639 |
| U10 | T3 | 30.9024 | 52.7225 | 0.3765 |
Table 4 Cooperative attack results of multiple UAV clusters on formation moving targets
| 飞行器 编号 | 打击的 目标 | 机间最短 距离/m | 到达时间/ s | 脱靶量/ m |
|---|---|---|---|---|
| U1 | T5 | 170.8413 | 52.7156 | 0.8003 |
| U2 | T8 | 30.3548 | 52.7175 | 0.8848 |
| U3 | T4 | 30.3548 | 52.7138 | 0.4068 |
| U4 | T1 | 188.3557 | 52.7194 | 0.2794 |
| U5 | T2 | 99.0358 | 52.7150 | 0.9716 |
| U6 | T6 | 38.1245 | 52.7306 | 0.5067 |
| U7 | T9 | 30.9024 | 52.7194 | 0.3841 |
| U8 | T7 | 249.4957 | 52.7144 | 0.5970 |
| U9 | T10 | 91.5536 | 52.7338 | 0.8639 |
| U10 | T3 | 30.9024 | 52.7225 | 0.3765 |

Fig.14 Statistical results of the utility function offormation moving targets hit 1000 times
| 飞行器 编号 | 飞行器位置初始状态 | 分配 的目 标 | 目标参数 | ||
|---|---|---|---|---|---|
| 位置/m | 速度/ (m·s-1) | 位置/m | 速度/ (m·s-1) | ||
| U1 | [1167,3067] | 112 | T6 | [6739,3847] | 30 |
| U2 | [1678,4305] | 118 | T3 | [7625,4390] | 30 |
| U3 | [1515,3897] | 116 | T7 | [6710,3475] | 30 |
| U4 | [1418,3140] | 114 | T10 | [7500,2800] | 30 |
| U5 | [1695,4177] | 120 | T9 | [7137,2887] | 30 |
| U6 | [1763,4363] | 114 | T5 | [6934,4166] | 30 |
| U7 | [1548,4378] | 119 | T2 | [7970,4247] | 30 |
| U8 | [1447,3598] | 112 | T4 | [7253,4361] | 30 |
| U9 | [1134,4234] | 114 | T1 | [8213,3963] | 30 |
| U10 | [2175,3445] | 114 | T8 | [6853,3130] | 30 |
Table 5 Initial conditionsof UAV clusters and formation maneuvering targets
| 飞行器 编号 | 飞行器位置初始状态 | 分配 的目 标 | 目标参数 | ||
|---|---|---|---|---|---|
| 位置/m | 速度/ (m·s-1) | 位置/m | 速度/ (m·s-1) | ||
| U1 | [1167,3067] | 112 | T6 | [6739,3847] | 30 |
| U2 | [1678,4305] | 118 | T3 | [7625,4390] | 30 |
| U3 | [1515,3897] | 116 | T7 | [6710,3475] | 30 |
| U4 | [1418,3140] | 114 | T10 | [7500,2800] | 30 |
| U5 | [1695,4177] | 120 | T9 | [7137,2887] | 30 |
| U6 | [1763,4363] | 114 | T5 | [6934,4166] | 30 |
| U7 | [1548,4378] | 119 | T2 | [7970,4247] | 30 |
| U8 | [1447,3598] | 112 | T4 | [7253,4361] | 30 |
| U9 | [1134,4234] | 114 | T1 | [8213,3963] | 30 |
| U10 | [2175,3445] | 114 | T8 | [6853,3130] | 30 |

Fig.15 Trajectory of UAVs with decentralized formation maneuvering targets

Fig.16 Shortest distance between aircrafts when attacking formation maneuvering targets
| 飞行器 编号 | 打击的 目标 | 机间最短 距离/m | 到达时间/ s | 脱靶量/ m |
|---|---|---|---|---|
| U1 | T6 | 32.1923 | 51.4519 | 0.6017 |
| U2 | T3 | 44.3185 | 51.4306 | 0.7211 |
| U3 | T7 | 112.7838 | 51.4988 | 0.5318 |
| U4 | T10 | 32.1923 | 51.6006 | 0.4136 |
| U5 | T9 | 36.2378 | 50.2988 | 0.9050 |
| U6 | T5 | 36.2379 | 50.4994 | 0.7721 |
| U7 | T2 | 37.7222 | 51.4375 | 0.6565 |
| U8 | T4 | 124.3851 | 51.4425 | 0.6433 |
| U9 | T1 | 129.7452 | 51.4744 | 0.9967 |
| U10 | T8 | 252.9497 | 52.6544 | 0.5169 |
Table 6 Cooperative attack results of multiple UAV clusters on formation maneuvering targets
| 飞行器 编号 | 打击的 目标 | 机间最短 距离/m | 到达时间/ s | 脱靶量/ m |
|---|---|---|---|---|
| U1 | T6 | 32.1923 | 51.4519 | 0.6017 |
| U2 | T3 | 44.3185 | 51.4306 | 0.7211 |
| U3 | T7 | 112.7838 | 51.4988 | 0.5318 |
| U4 | T10 | 32.1923 | 51.6006 | 0.4136 |
| U5 | T9 | 36.2378 | 50.2988 | 0.9050 |
| U6 | T5 | 36.2379 | 50.4994 | 0.7721 |
| U7 | T2 | 37.7222 | 51.4375 | 0.6565 |
| U8 | T4 | 124.3851 | 51.4425 | 0.6433 |
| U9 | T1 | 129.7452 | 51.4744 | 0.9967 |
| U10 | T8 | 252.9497 | 52.6544 | 0.5169 |

Fig.17 Statistical results of the utility function of formation maneuvering targets hit 1000 times
| [1] |
闵海波, 刘源, 王仕成, 等. 多个体协调控制问题综述[J]. 自动化学报, 2012, 38(10):1557-1570.
|
|
doi: 10.3724/SP.J.1004.2012.01557 URL |
|
| [2] |
|
| [3] |
doi: 10.1109/TCST.2005.863655 URL |
| [4] |
张友安, 马国欣, 王兴平. 多导弹时间协同制导:一种领弹-被领弹策略[J]. 航空学报, 2009, 30(6):1109-1118.
|
|
|
|
| [5] |
赵世钰, 周锐. 基于协调变量的多导弹协同制导[J]. 航空学报, 2008, 29(6):1605-1611.
|
|
|
|
| [6] |
王晓芳, 郑艺裕, 林海. 多导弹协同作战制导律研究[J]. 弹道学报, 2014, 26(1):61-66.
|
|
|
|
| [7] |
赵启伦, 陈建, 董希旺, 等. 拦截高超声速目标的异类导弹协同制导律[J]. 航空学报, 2016, 37(3):936-948.
doi: 10.7527/S1000-6893.2015.0235 |
|
|
|
| [8] |
马国欣, 张友安. 多导弹时间协同分布式导引律设计[J]. 控制与决策, 2014, 29(5):843-847.
|
|
|
|
| [9] |
王天宁, 张世隆, 葛航. 考虑目标观测度的领从式协同制导研究[J]. 飞行力学, 2021, 39(5):56-62.
|
|
|
|
| [10] |
|
| [11] |
陈中原, 韦文书, 陈万春. 基于强化学习的多发导弹协同攻击智能制导律[J]. 兵工学报, 2021, 42(8):1638-1647.
|
|
doi: 10.3969/j.issn.1000-1093.2021.08.008 |
|
| [12] |
|
| [13] |
doi: 10.1109/9.664154 URL |
| [14] |
doi: 10.2514/1.G001726 URL |
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
doi: 10.1109/TITS.2010.2061971 URL |
| [20] |
doi: 10.1007/s10479-013-1347-y URL |
| [21] |
杨健. 无人机集群系统空域冲突消解方法研究[D]. 长沙: 国防科学技术大学, 2016:101-123.
|
|
|
|
| [22] |
赵毓, 郭继峰, 郑红星, 等. 基于强化学习的多无人机避碰计算制导方法[J]. 导航定位与授时, 2021, 8(1):31-40.
|
|
|
|
| [23] |
|
| [24] |
doi: 10.2514/1.I010900 URL |
| [25] |
doi: 10.2140/pjm URL |
| [1] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [2] | JU Shuang, WANG Jing, WANG Hao, ZHOU Meng. Formation Reconfiguration Control of Multiple Mobile Robots with Severe Actuator Faults Based on GWO-WOA [J]. Acta Armamentarii, 2023, 44(S2): 114-125. |
| [3] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [4] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [5] | YANG Jiaxiu, LI Xinkai, ZHANG Hongli, WANG Hao. Robust Tracking of Quadrotor UAVs Based on Integral Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(9): 2802-2813. |
| [6] | CAO Yan, LONG Teng, SUN Jingliang, ZHOU Yuze. Distributed Task Allocation Algorithm for Multiple Unmanned Aerial Vehicle Based on Information Retransmission and Package Loss Compensation [J]. Acta Armamentarii, 2023, 44(9): 2697-2708. |
| [7] | WANG Yuchen, WANG Wei, LIN Shiyao, YANG Jing, WANG Shaolong, YIN Zhao. Three-dimensional Adaptive Sliding Mode Cooperative Guidance Law with Impact Time and Angle Constraints [J]. Acta Armamentarii, 2023, 44(9): 2778-2790. |
| [8] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| [9] | ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment [J]. Acta Armamentarii, 2023, 44(9): 2685-2696. |
| [10] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| [11] | ZHENG Lei, CHEN Zhimin, JIA Yuxuan. UAV Swarm Tracking Method Based on Wide-Area Deployment of Intelligent Reflecting Surfaces [J]. Acta Armamentarii, 2023, 44(6): 1837-1845. |
| [12] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [13] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [14] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [15] | LI Guofei, TANG Qingpu, WU Yunjie. Cooperative Guidance Method of Leader and Seeker-less Follower Flight Vehicles [J]. Acta Armamentarii, 2023, 44(11): 3436-3446. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||