
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (2): 484-495.doi: 10.12382/bgxb.2021.0606
Previous Articles Next Articles
YIN Yiyi1,2, WANG Xiaofang1,*( ), ZHOU Jian3
), ZHOU Jian3
Received:2021-09-05
Online:2022-06-10
Contact:
WANG Xiaofang
CLC Number:
YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method[J]. Acta Armamentarii, 2023, 44(2): 484-495.
Add to citation manager EndNote|Ris|BibTeX
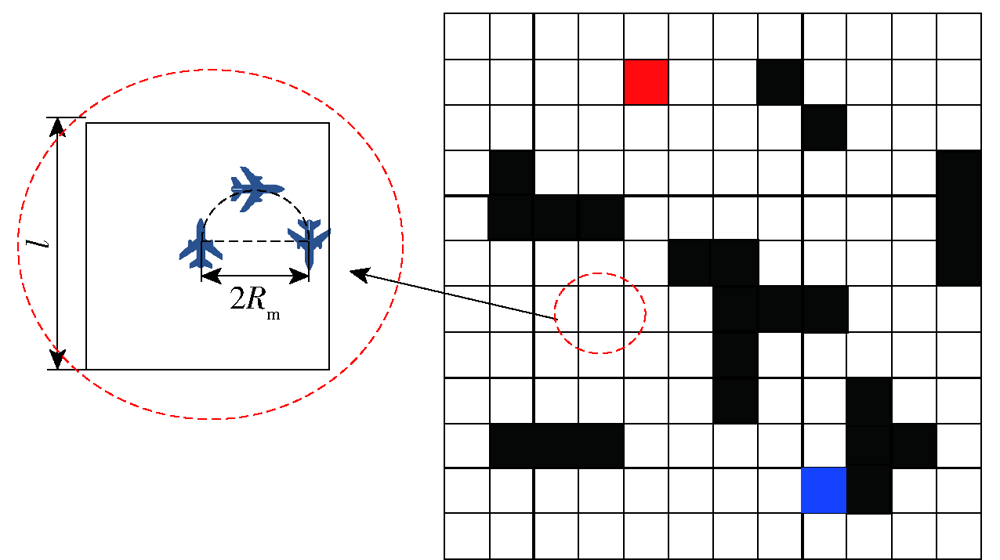
Fig.1 Diagram of battlefield model
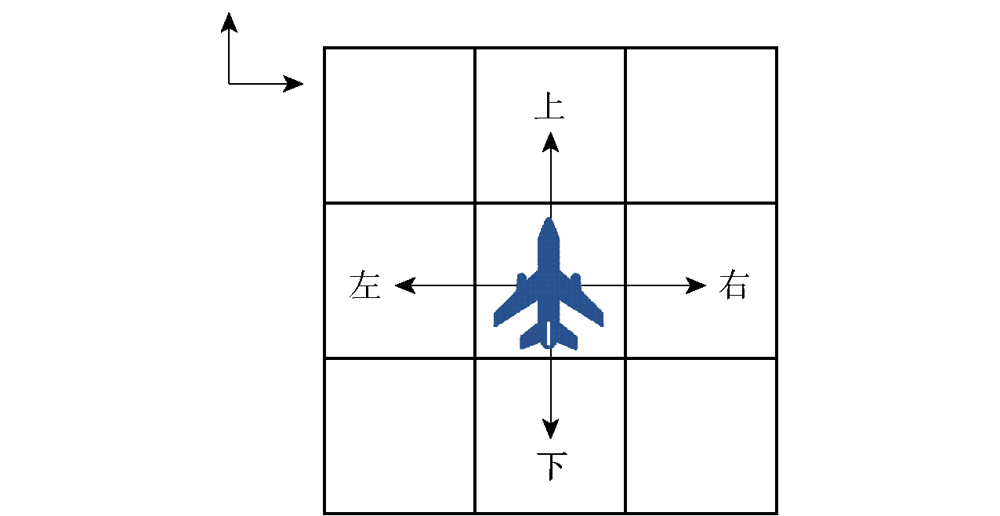
Fig.2 Diagram of action space
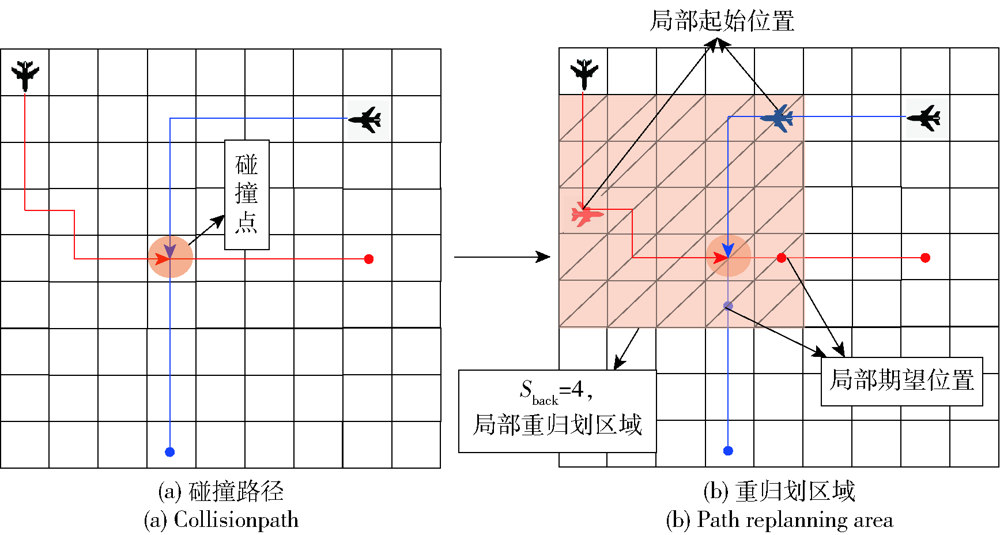
Fig.3 Partial path replanning for multiple UAVs
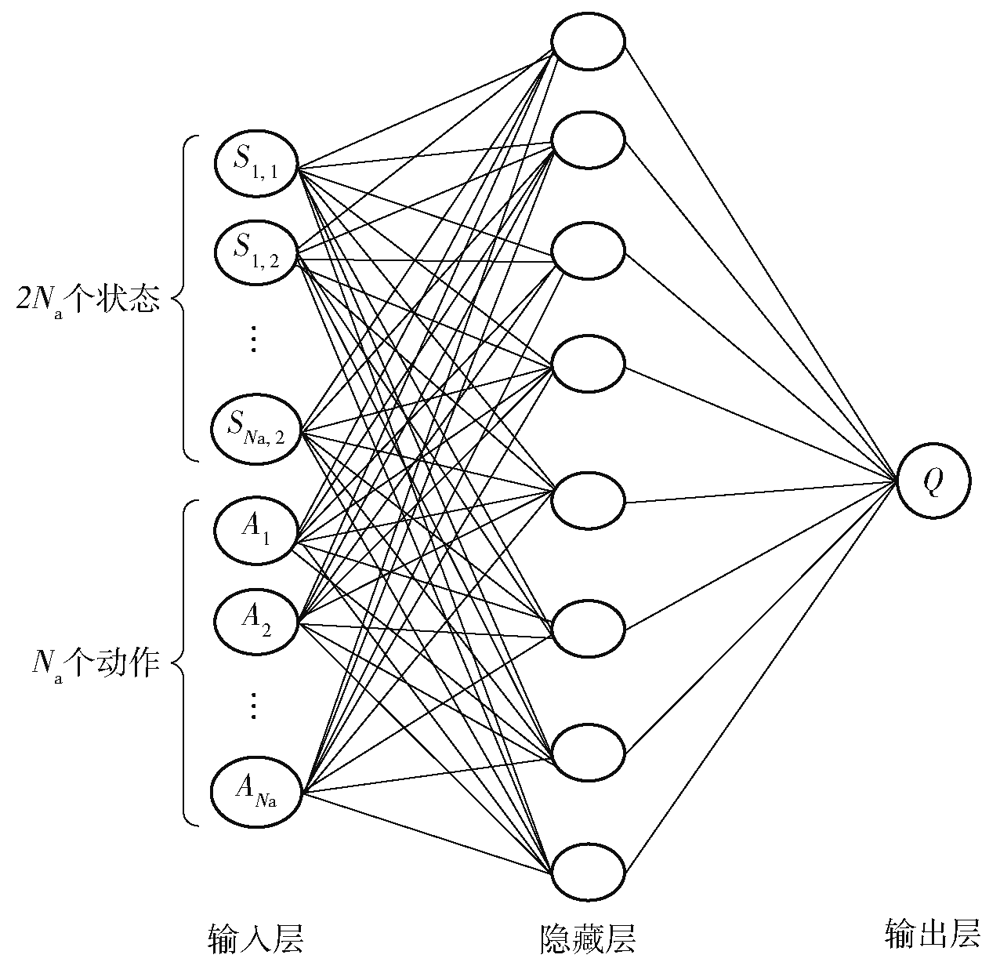
Fig.4 Neural network model of partial path replanning
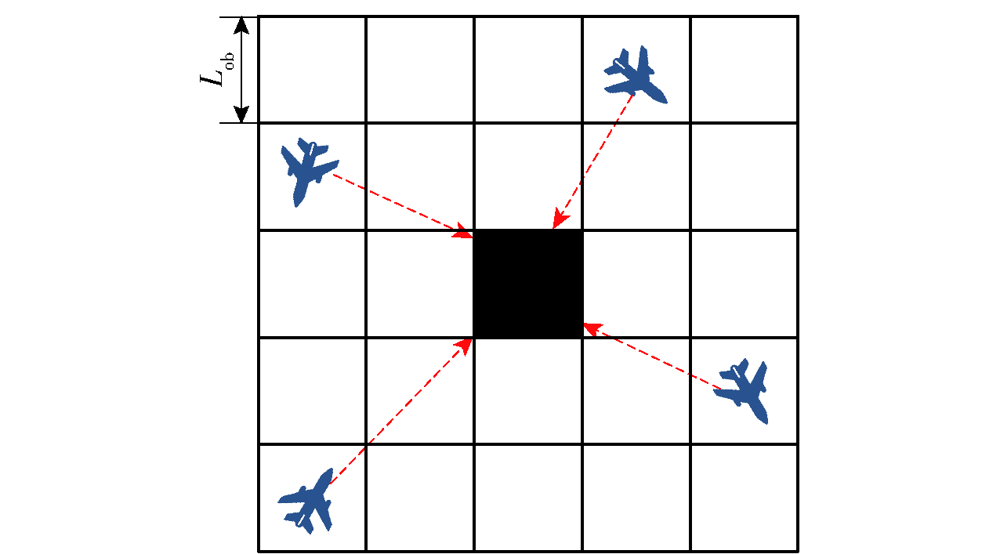
Fig.5 Unexplored obstacle area
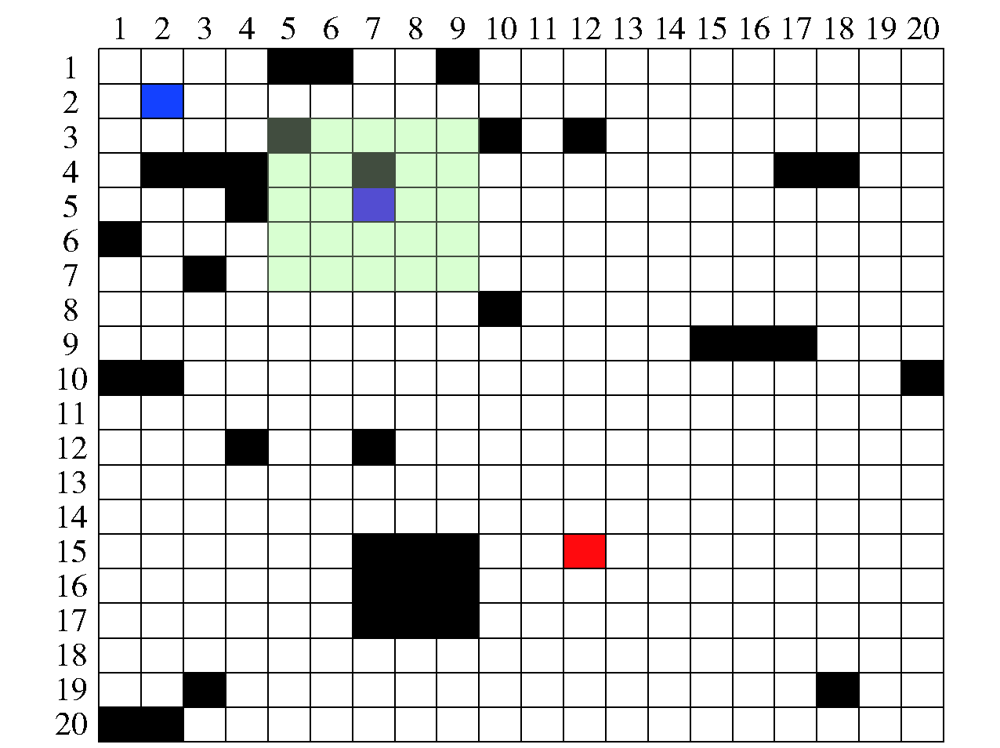
Fig.6 Battlefield model with unexplored obstacle
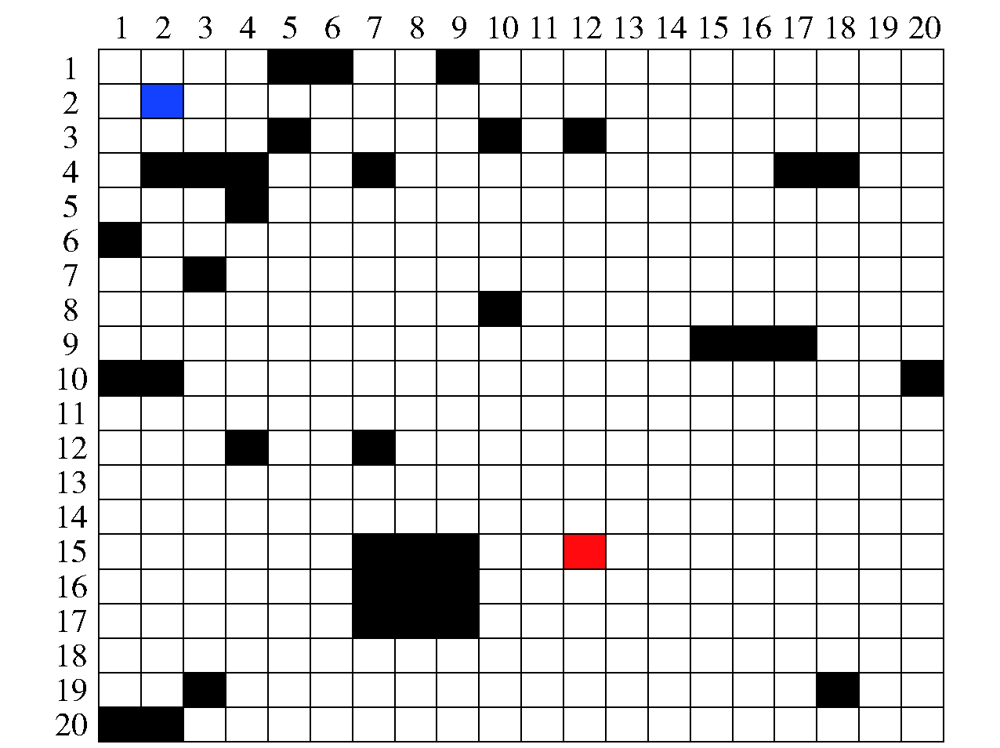
Fig.7 A simulation example of battlefield model
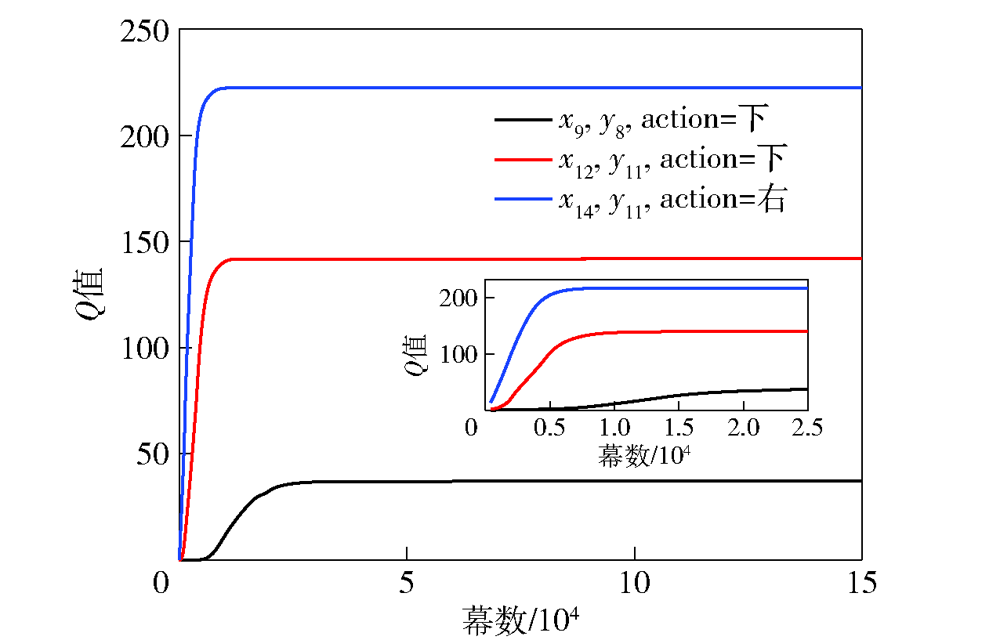
Fig.8 Part of Q value variation curves
| 无人机编号 | 初始位置 | 期望位置 | ||
|---|---|---|---|---|
| x | y | X | Y | |
| 1 | 2 | 1 | 15 | 12 |
| 2 | 1 | 18 | 15 | 12 |
| 3 | 16 | 1 | 15 | 12 |
| 4 | 19 | 20 | 15 | 12 |
Table 1 Parameters of UAVs
| 无人机编号 | 初始位置 | 期望位置 | ||
|---|---|---|---|---|
| x | y | X | Y | |
| 1 | 2 | 1 | 15 | 12 |
| 2 | 1 | 18 | 15 | 12 |
| 3 | 16 | 1 | 15 | 12 |
| 4 | 19 | 20 | 15 | 12 |
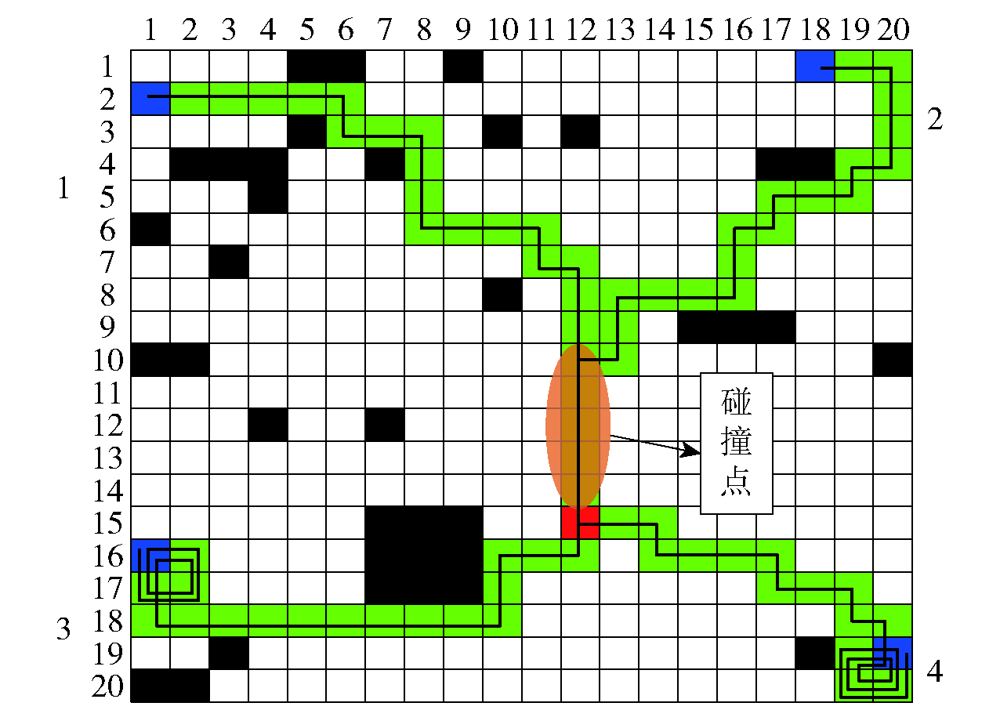
Fig.9 Time-coordinated path 1
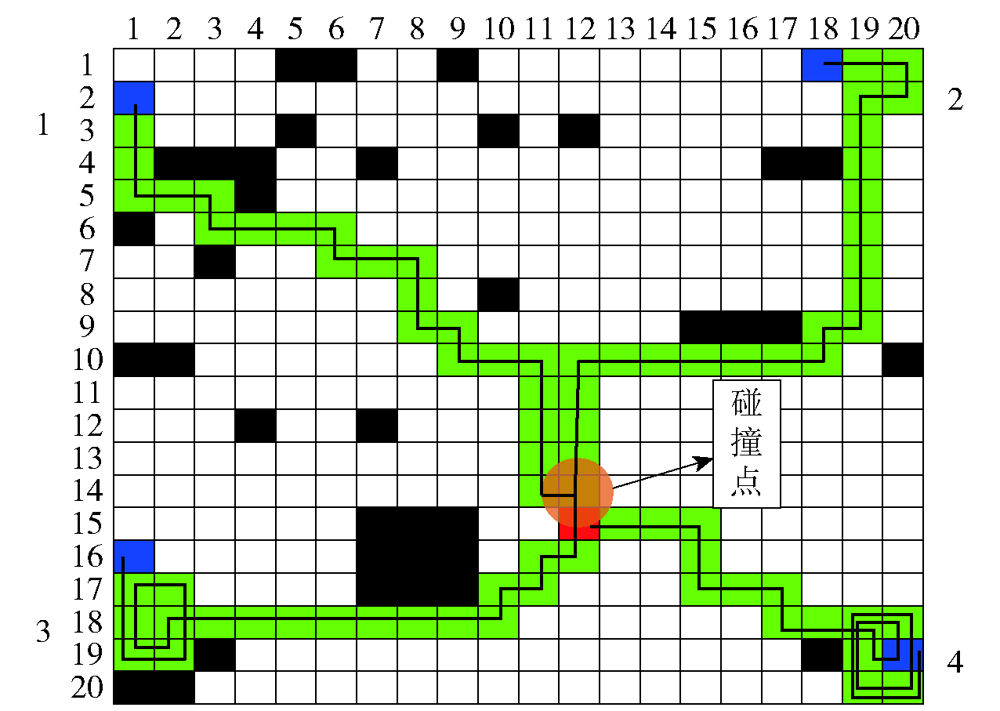
Fig.10 Time-coordinated path 2
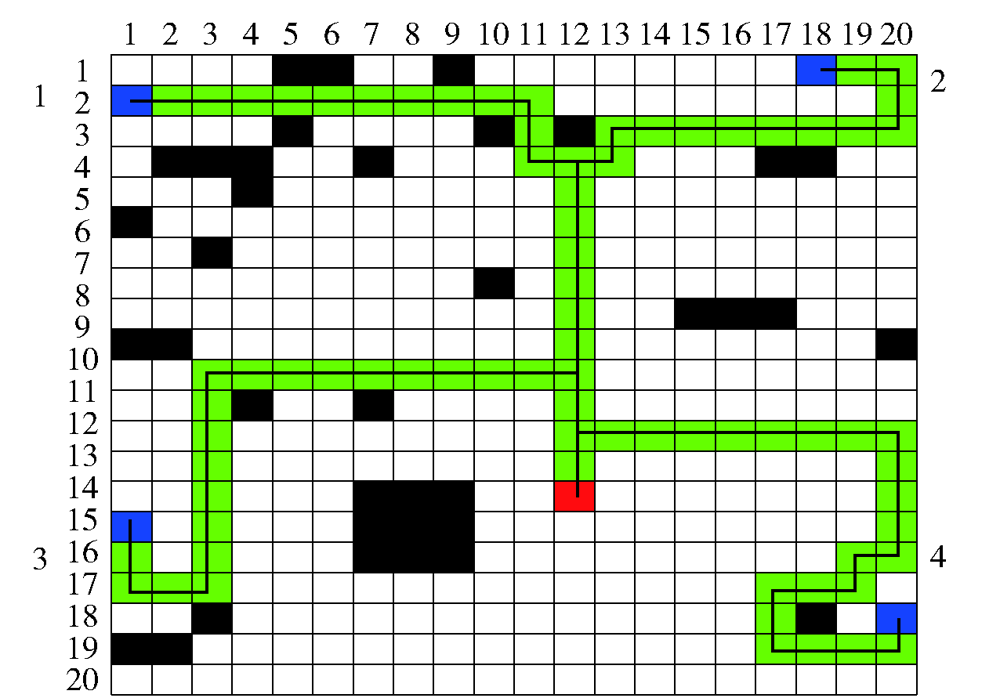
Fig.11 Time-coordinated paths based on A* algorithm
| 次数 | Q学习算法时间/s | A*算法时间/s |
|---|---|---|
| 1 | 0.131 | 0.278 |
| 2 | 0.135 | 0.196 |
| 3 | 0.122 | 0.209 |
| 4 | 0.158 | 0.194 |
| 4 | 0.128 | 0.202 |
Table 2 Performance comparison between the Q-learning and A* algorithms
| 次数 | Q学习算法时间/s | A*算法时间/s |
|---|---|---|
| 1 | 0.131 | 0.278 |
| 2 | 0.135 | 0.196 |
| 3 | 0.122 | 0.209 |
| 4 | 0.158 | 0.194 |
| 4 | 0.128 | 0.202 |
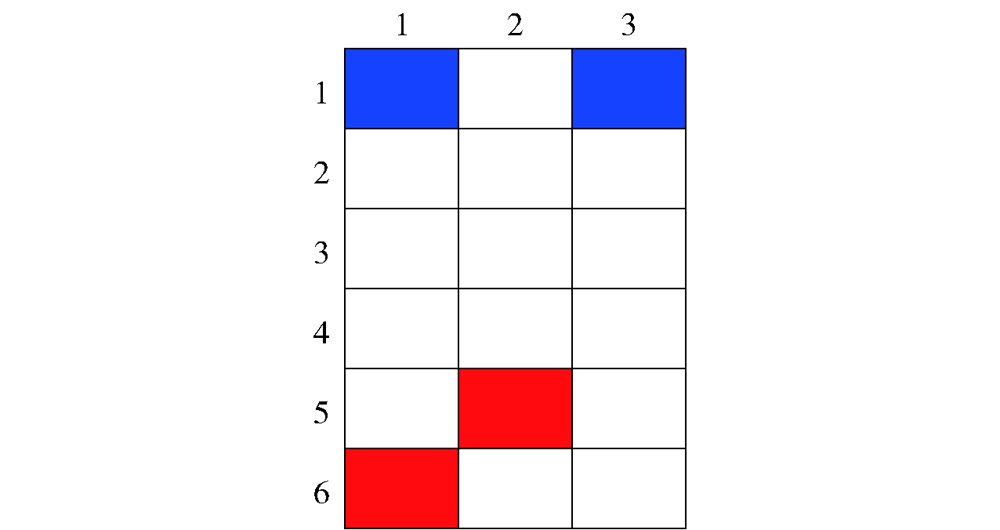
Fig.12 Partial path replanning area
| 无人机编号 | 初始位置 | 期望位置 | ||
|---|---|---|---|---|
| x | y | X | Y | |
| 1 | 1 | 1 | 6 | 1 |
| 2 | 1 | 3 | 5 | 2 |
Table 3 Starting position and expected position of UAV 3 and 4 in the partial area
| 无人机编号 | 初始位置 | 期望位置 | ||
|---|---|---|---|---|
| x | y | X | Y | |
| 1 | 1 | 1 | 6 | 1 |
| 2 | 1 | 3 | 5 | 2 |
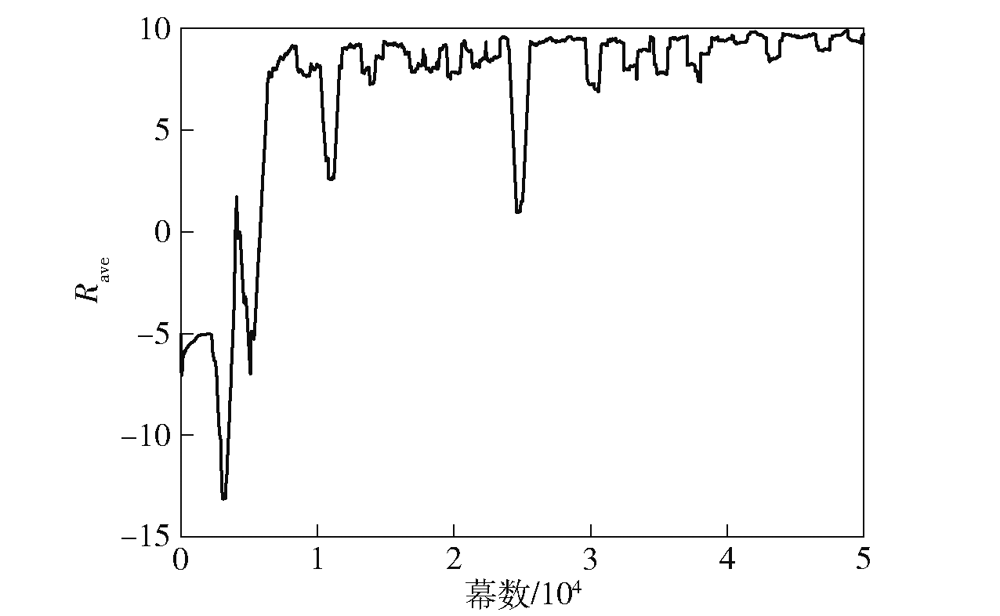
Fig.13 Average reward curve
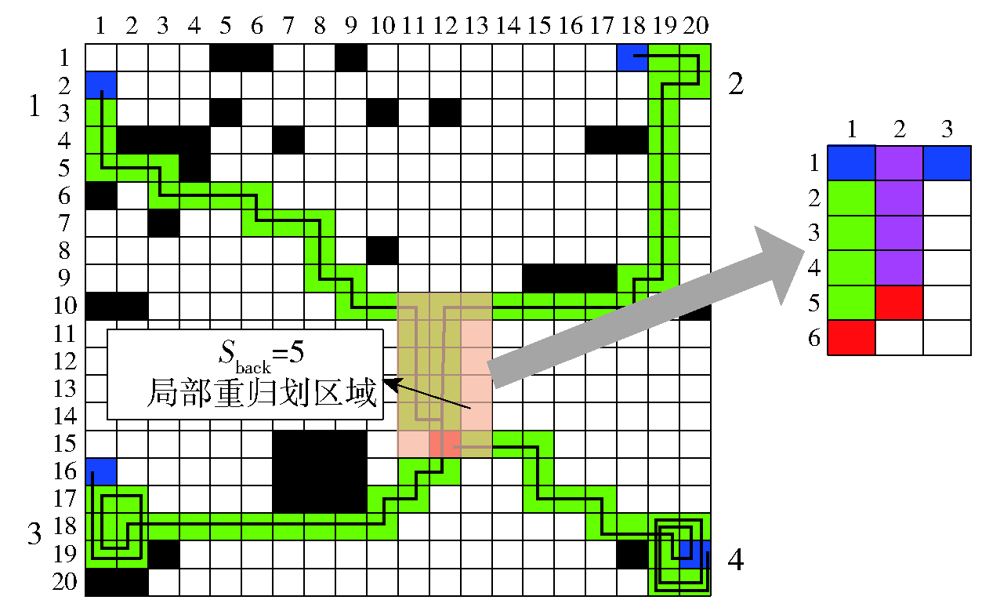
Fig.14 Diagram of partial path replanning
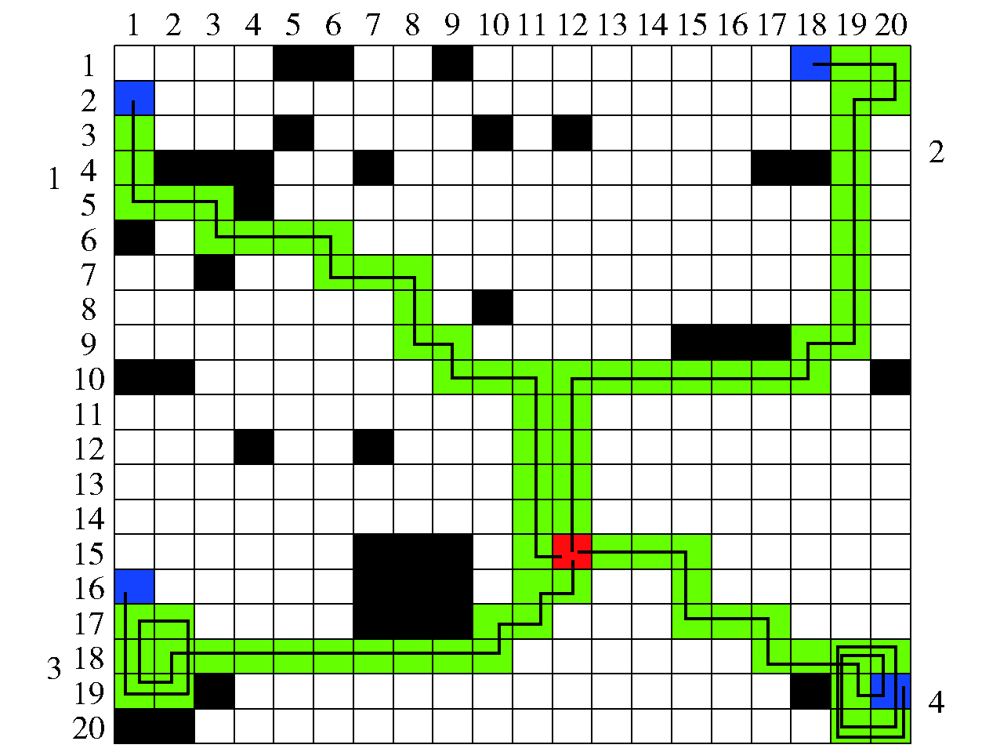
Fig.15 Diagram of cooperative path
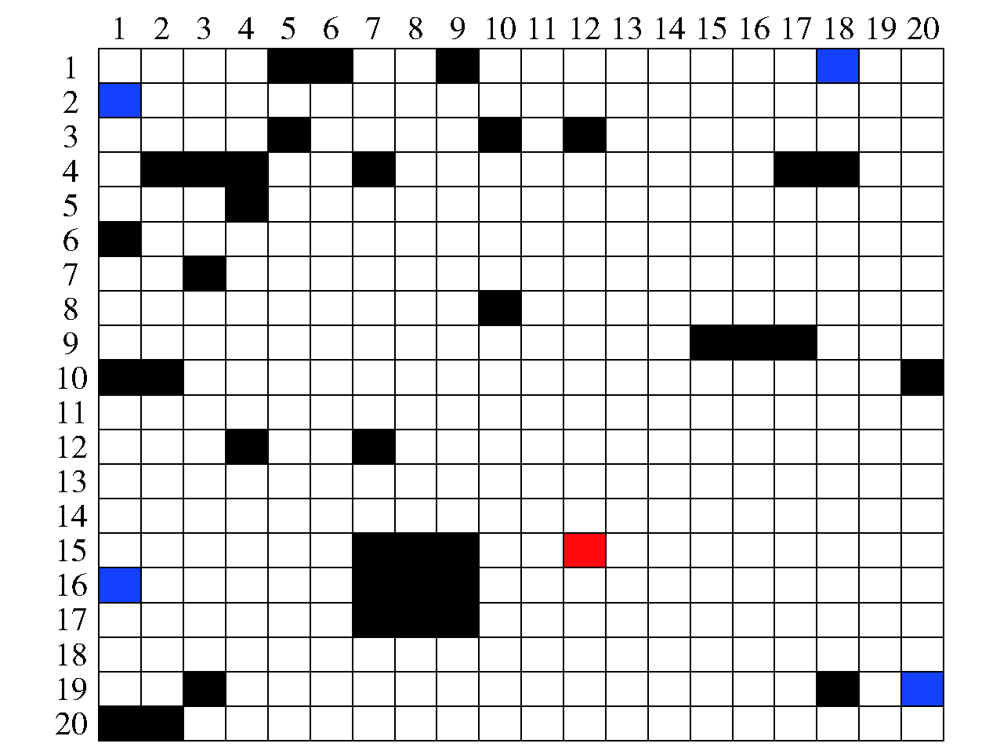
Fig.16 Battlefield model with unexplored obstacle for simulation
| Q-table | 上 | 下 | 左 | 右 |
|---|---|---|---|---|
| state1 | 0 | 1.3118 | 0 | 1.3118 |
| … | … | … | … | … |
| State48 | 6.2560 | 9.7735 | 6.2550 | 9.7734 |
| … | … | … | … | … |
| state69 | 9.7734 | 15.270 | 9.7734 | 15.270 |
| state70 | 0 | 19.088 | 12.216 | 19.088 |
Table 4 Partial Q-table before superposition
| Q-table | 上 | 下 | 左 | 右 |
|---|---|---|---|---|
| state1 | 0 | 1.3118 | 0 | 1.3118 |
| … | … | … | … | … |
| State48 | 6.2560 | 9.7735 | 6.2550 | 9.7734 |
| … | … | … | … | … |
| state69 | 9.7734 | 15.270 | 9.7734 | 15.270 |
| state70 | 0 | 19.088 | 12.216 | 19.088 |
| Q-table | 上 | 下 | 左 | 右 |
|---|---|---|---|---|
| state1 | 0 | 1.3118 | 0 | 1.3118 |
| … | … | … | … | … |
| State48 | 6.2550 | 9.1334 | 5.6150 | 9.3638 |
| … | … | … | … | … |
| state69 | 9.3638 | 14.631 | 9.1334 | 15.271 |
| state70 | 0 | 19.088 | 12.216 | 19.088 |
Table 5 Partial Q-table after superposition
| Q-table | 上 | 下 | 左 | 右 |
|---|---|---|---|---|
| state1 | 0 | 1.3118 | 0 | 1.3118 |
| … | … | … | … | … |
| State48 | 6.2550 | 9.1334 | 5.6150 | 9.3638 |
| … | … | … | … | … |
| state69 | 9.3638 | 14.631 | 9.1334 | 15.271 |
| state70 | 0 | 19.088 | 12.216 | 19.088 |
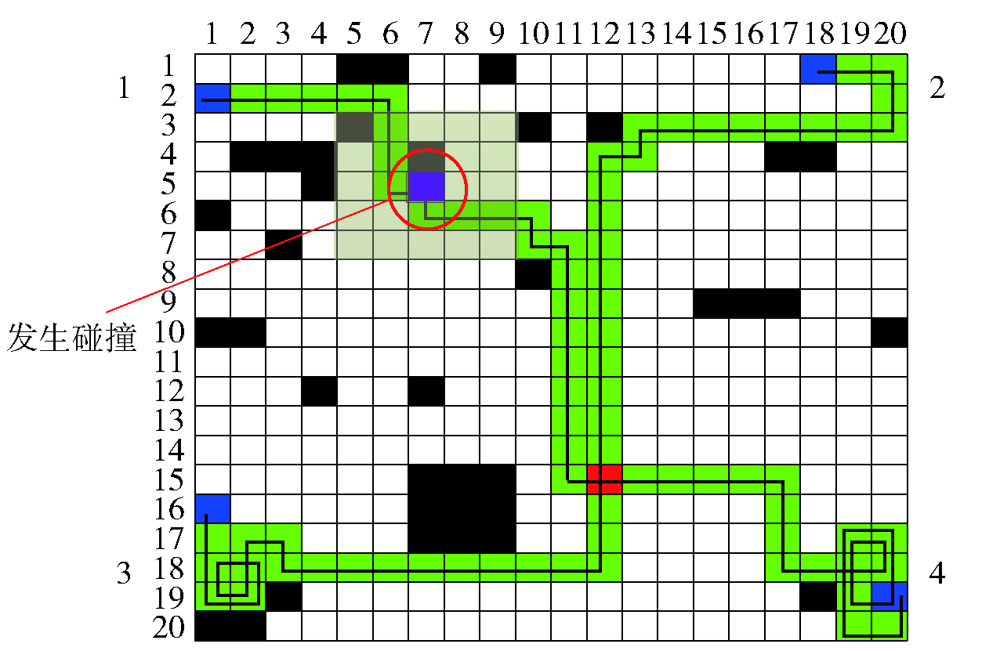
Fig.17 Cooperative path 1 with unexplored obstacle
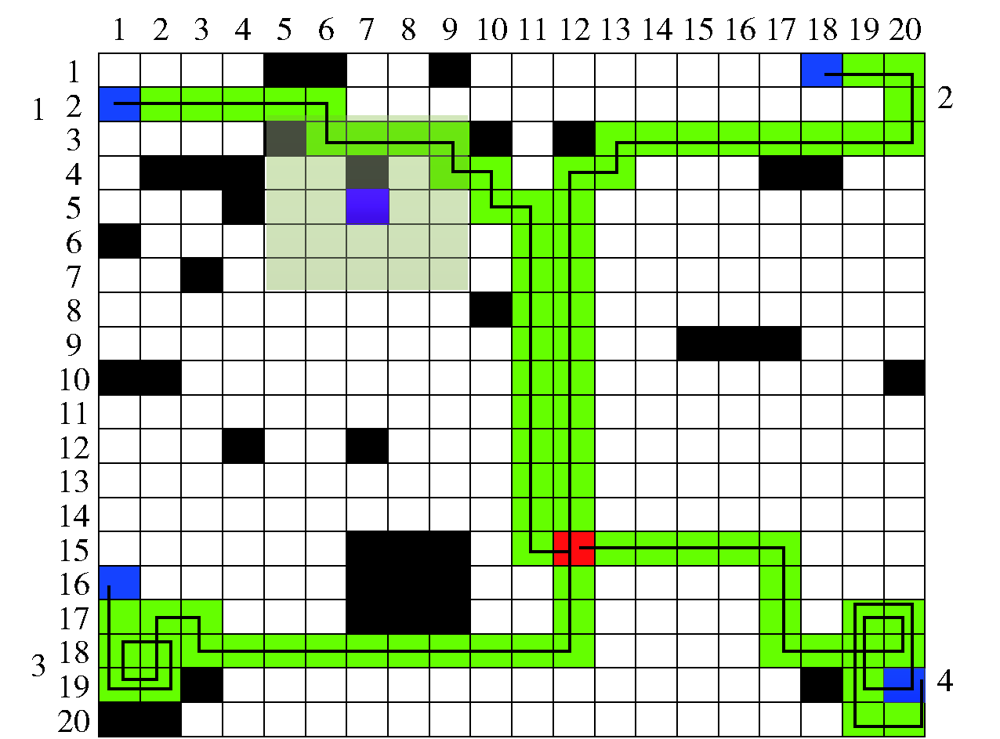
Fig.18 Cooperative path 2 with unexplored obstacle
| [1] |
陈中原, 韦文书, 陈万春. 基于强化学习的多弹协同攻击智能制导律[J]. 兵工学报, 2021, 42(8):1638-1647.
|
|
doi: 10.3969/j.issn.1000-1093.2021.08.008 |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
杜云, 彭瑜, 邵士凯, 等. 基于改进粒子群优化的多无人机协同航迹规划[J]. 科学技术与工程, 2020, 20(32):13258-13264.
|
|
|
|
| [6] |
王洪斌, 郝策, 张平, 等. 基于A*算法和人工势场法的移动机器人路径规划[J]. 中国机械工程, 2019 30(20):2489-2496.
|
|
|
|
| [7] |
doi: 10.3390/s18124188 URL |
| [8] |
|
| [9] |
杜楠楠, 陈建, 马奔, 等. 多太阳能无人机覆盖路径优化方法[J]. 航空学报, 2021, 42(6):324476.
doi: 10.7527/S1000-6893.2020.24476 |
|
doi: 10.7527/S1000-6893.2020.24476 |
|
| [10] |
|
| [11] |
胡腾, 刘占军, 刘洋, 等. 多无人机3D侦察路径规划[J]. 系统工程与电子技术, 2019, 41(7):1551-1559.
|
|
|
|
| [12] |
|
| [13] |
doi: 10.1109/TAES.7 URL |
| [14] |
乔林, 罗杰. 学习过程中共享经验的Q学习算法的研究[J]. 计算机科学, 2012, 39(5):213-216.
|
|
|
|
| [15] |
doi: 10.1109/OJCOMS.2021.3081996 URL |
| [16] |
王毅然, 经小川, 田涛, 等. 基于强化学习的多Agent路径规划方法研究[J]. 计算机应用与软件, 2019, 36(8): 165-171.
|
|
|
|
| [17] |
doi: 10.1109/Access.6287639 URL |
| [18] |
doi: 10.1049/cit2.v5.3 URL |
| [19] |
相晓嘉, 闫超, 王菖, 等. 基于深度强化学习的固定翼无人机编队协调控制方法[J]. 航空学报, 2021, 42(4): 524009.
doi: 10.7527/S1000-6893.2020.24009 |
|
doi: 10.7527/S1000-6893.2020.24009 |
|
| [20] |
姚冬冬, 王晓芳, 田震. 一种同时满足攻击角度和时间的航迹规划方法[J]. 弹箭与制导学报, 2019, 39(3):111-114.
|
|
|
| [1] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [2] | JU Shuang, WANG Jing, WANG Hao, ZHOU Meng. Formation Reconfiguration Control of Multiple Mobile Robots with Severe Actuator Faults Based on GWO-WOA [J]. Acta Armamentarii, 2023, 44(S2): 114-125. |
| [3] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [4] | HAN Yu, SONG Tao, ZHENG Duo, LIU Xin. Unmanned Aerial Vehicle Cluster Cooperative Guidance Technology Based on Conflict Trigger Mechanism [J]. Acta Armamentarii, 2023, 44(7): 1881-1895. |
| [5] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [6] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [7] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [8] | LI Qingbo, LI Fang, DONG Ruixing, FAN Ruishan, XIE Wenlong. Navigation Ratio Design of Proportional Navigation Law Using Reinforcement Learning [J]. Acta Armamentarii, 2022, 43(12): 3040-3047. |
| [9] | ZHANG Wanqing, YU Wenbin, LI Jinglin, CHEN Wanchun. Cooperative Reentry Guidance for Intelligent Lateral Maneuver of Hypersonic Vehicle Based on Downrange Analytical Solution [J]. Acta Armamentarii, 2021, 42(7): 1400-1411. |
| [10] | CAO Hao-zhe, WU Yan-xuan, ZHOU Feng, WANG Zheng-jie. Research on Containment Control of Second-order Nonlinear Multi-agent with Collision Avoidance Mechanism [J]. Acta Armamentarii, 2016, 37(9): 1646-1654. |
| [11] | ZHANG Lei, FANG Yang-wang, CHAI Dong, YONG Xiao-ju. Cruise Missile Path Planning Based on Improved Quantum Evolutionary Algorithm [J]. Acta Armamentarii, 2014, 35(11): 1820-1827. |
| [12] | JIAO Yu-min, WANG Qiang, XU Ting, XIE Qing-hua, WANG Hai-tao. GA-Q-learning Algorithm-based Operation Planning Model for Virtual Maintenance Process [J]. Acta Armamentarii, 2013, 34(5): 627-633. |
| [13] | FU Yang-guang, ZHOU Cheng-ping2, HU Han-ping2. Research on Differential Evolution Algorithm for Path Planning for Unmanned Aerial Vehicle inOcean Environment [J]. Acta Armamentarii, 2012, 33(3): 295-300. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||