
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (S2): 240-250.doi: 10.12382/bgxb.2024.0780
Previous Articles Next Articles
YANG Ziao1,2, QU Qifu3, SUN Haiwen4, LI Ye4, JI Zhentao5,*( )
)
Received:2024-09-02
Online:2024-12-12
Contact:
JI Zhentao
YANG Ziao, QU Qifu, SUN Haiwen, LI Ye, JI Zhentao. Inertial-based Deep-coupling Navigation Method with Embedded Flight Dynamics[J]. Acta Armamentarii, 2024, 45(S2): 240-250.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Coordinate system
Fig.2 Force analysis diagram of high dynamic flight vehicle
Fig.3 Schematic diagram of flight phase of high dynamic flight vehicle
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 初始速度/(m·s-1) | 50 | 一级装药量/kg | 22080 |
| 发射倾角/(°) | 90 | 一级推进时间/s | 61.6 |
| 发射偏角/(°) | 90 | 二级装药量/kg | 6246 |
| 初始质量/kg | 34335 | 二级推进时间/s | 65.2 |
| 装药量/kg | 31759 | 三级装药量/kg | 3317 |
| 燃料比冲/(N·s·kg-1) | 2393 | 三级推进时间/s | 59.6 |
| 旋转体释放时间/s | 550 | 垂直上升时间/s | 1.49 |
| 飞行器半径/m | 0.72 | 旋转体半径/m | 0.27 |
Table 1 Initial conditions for high dynamic flight vehicle launch
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 初始速度/(m·s-1) | 50 | 一级装药量/kg | 22080 |
| 发射倾角/(°) | 90 | 一级推进时间/s | 61.6 |
| 发射偏角/(°) | 90 | 二级装药量/kg | 6246 |
| 初始质量/kg | 34335 | 二级推进时间/s | 65.2 |
| 装药量/kg | 31759 | 三级装药量/kg | 3317 |
| 燃料比冲/(N·s·kg-1) | 2393 | 三级推进时间/s | 59.6 |
| 旋转体释放时间/s | 550 | 垂直上升时间/s | 1.49 |
| 飞行器半径/m | 0.72 | 旋转体半径/m | 0.27 |

Fig.4 Flight trajectory of high dynamic flight vehicle

Fig.5 Navigation algorithm framework
| 参数 | 数值 |
|---|---|
| 陀螺仪零偏/((°)·h-1) | 10 |
| 加速度计零偏/mg | 10 |
| 发射初速偏差均值/% | 2 |
| 发射倾角偏差均值/% | 0.03 |
| 发射偏角偏差均值/% | 0.015 |
Table2 Simulation condition setting
| 参数 | 数值 |
|---|---|
| 陀螺仪零偏/((°)·h-1) | 10 |
| 加速度计零偏/mg | 10 |
| 发射初速偏差均值/% | 2 |
| 发射倾角偏差均值/% | 0.03 |
| 发射偏角偏差均值/% | 0.015 |

Fig.6 Phase-wise angular velocity and acceleration error curves
| 阶段 | 角速度误差阈值 | 加速度误差阈值 |
|---|---|---|
| 非旋转段 | 0.0000634 | 0.2445 |
| 旋转段 | 0.0746 | 0.0457 |
Table 3 Angular velocity and acceleration error threshold
| 阶段 | 角速度误差阈值 | 加速度误差阈值 |
|---|---|---|
| 非旋转段 | 0.0000634 | 0.2445 |
| 旋转段 | 0.0746 | 0.0457 |
Fig.7 Scenario 1:navigation position error curve of high dynamic flight vehicle
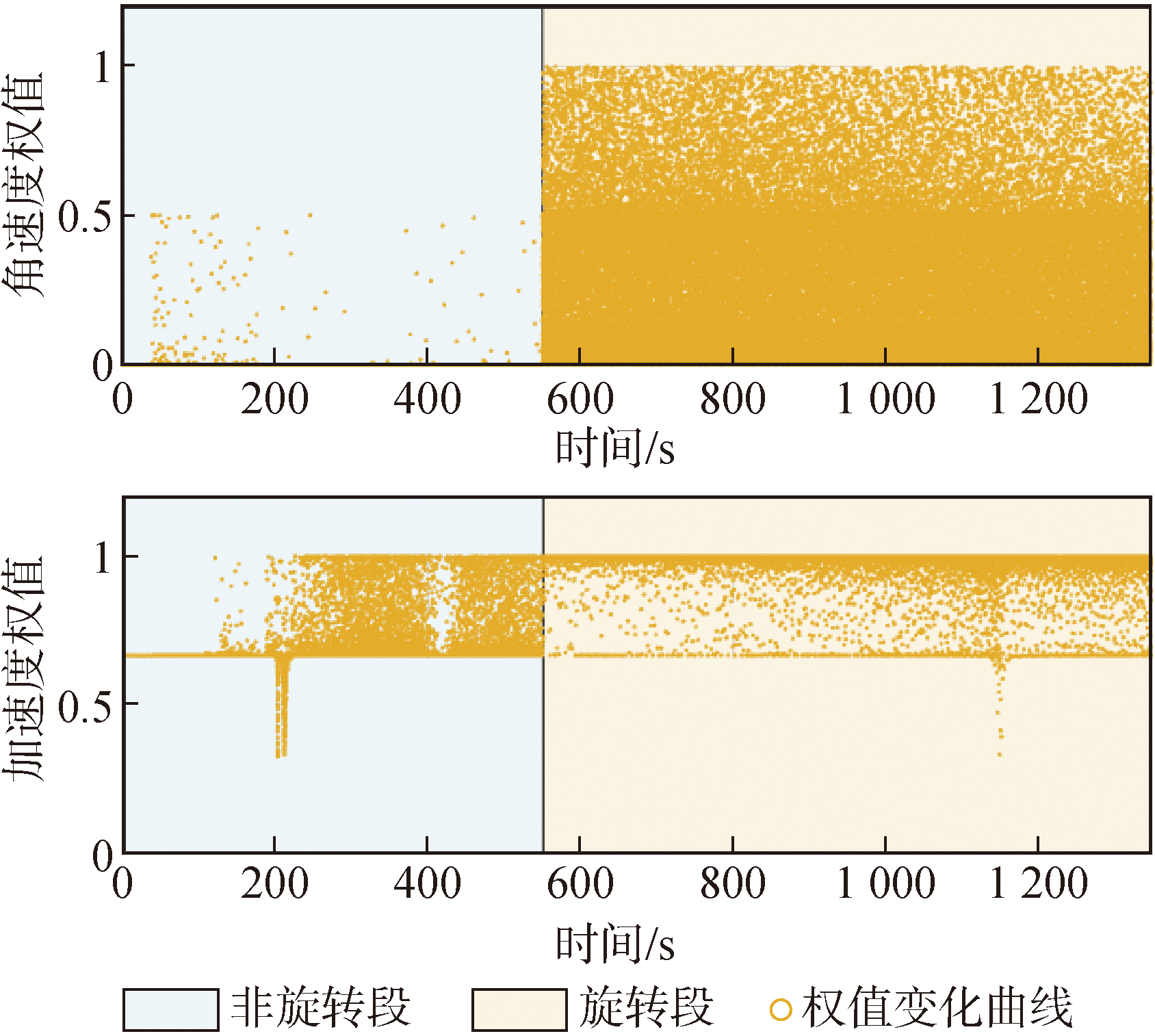
Fig.8 Scenario 1:weight variation curve of high dynamic flight vehicle
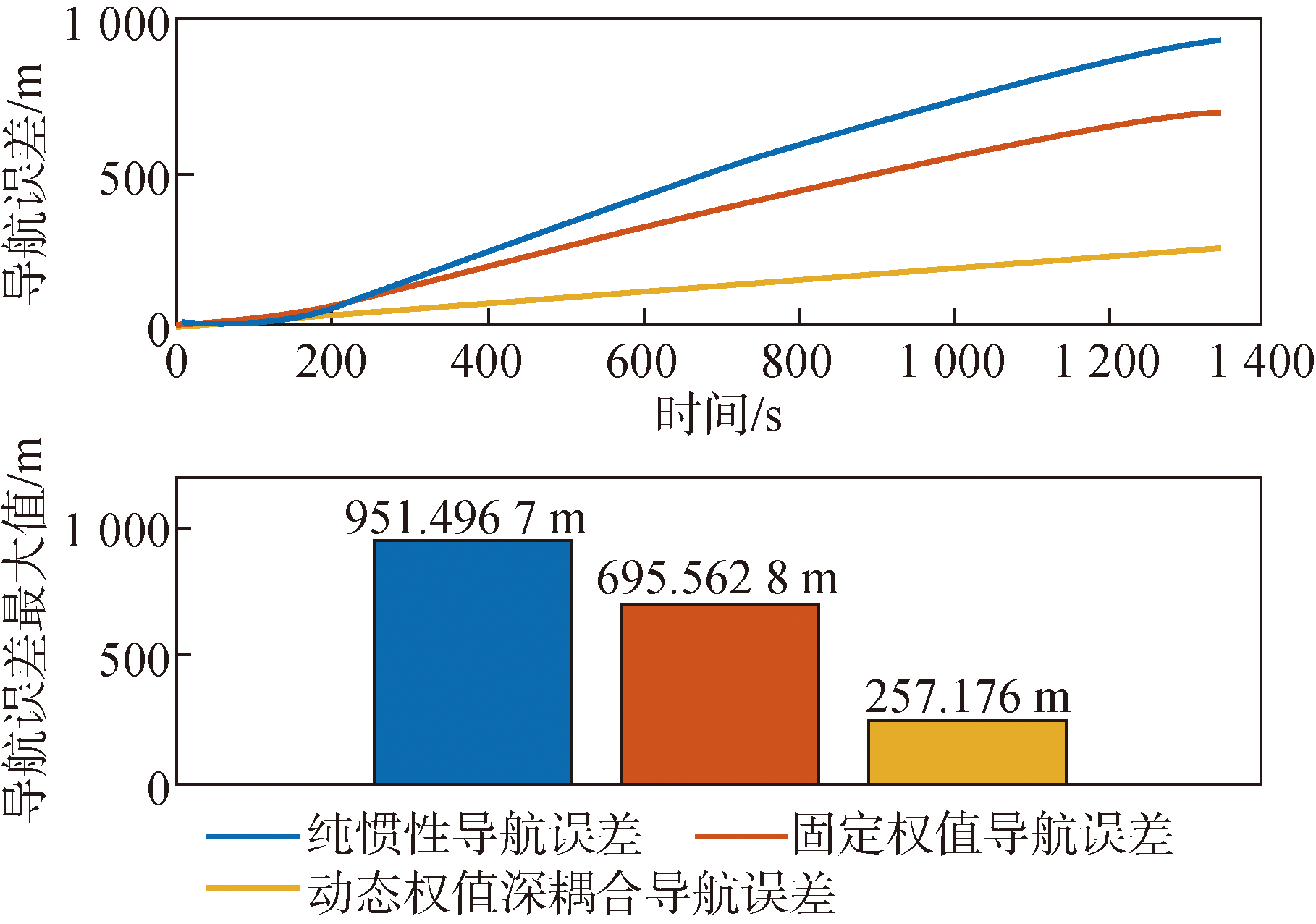
Fig.9 Scenario 2:navigation position error curve of high dynamic flight vehicle

Fig.10 Scenario 2:weight variation curve of high dynamic flight vehicle
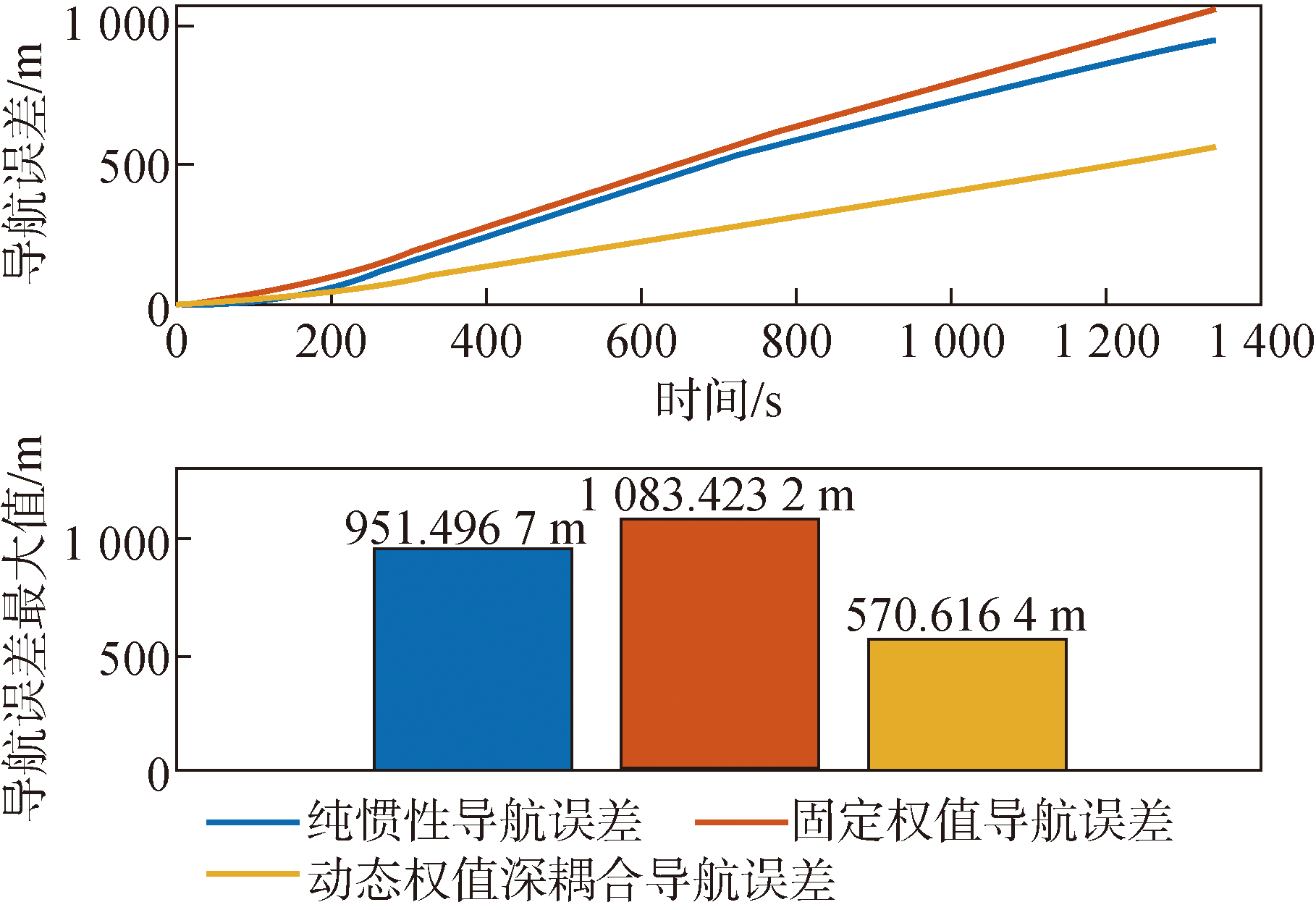
Fig.11 Scenario 3:navigation position error curve of high dynamic flight vehicle

Fig.12 Scenario 3:weight variation curve of high dynamic flight vehicle
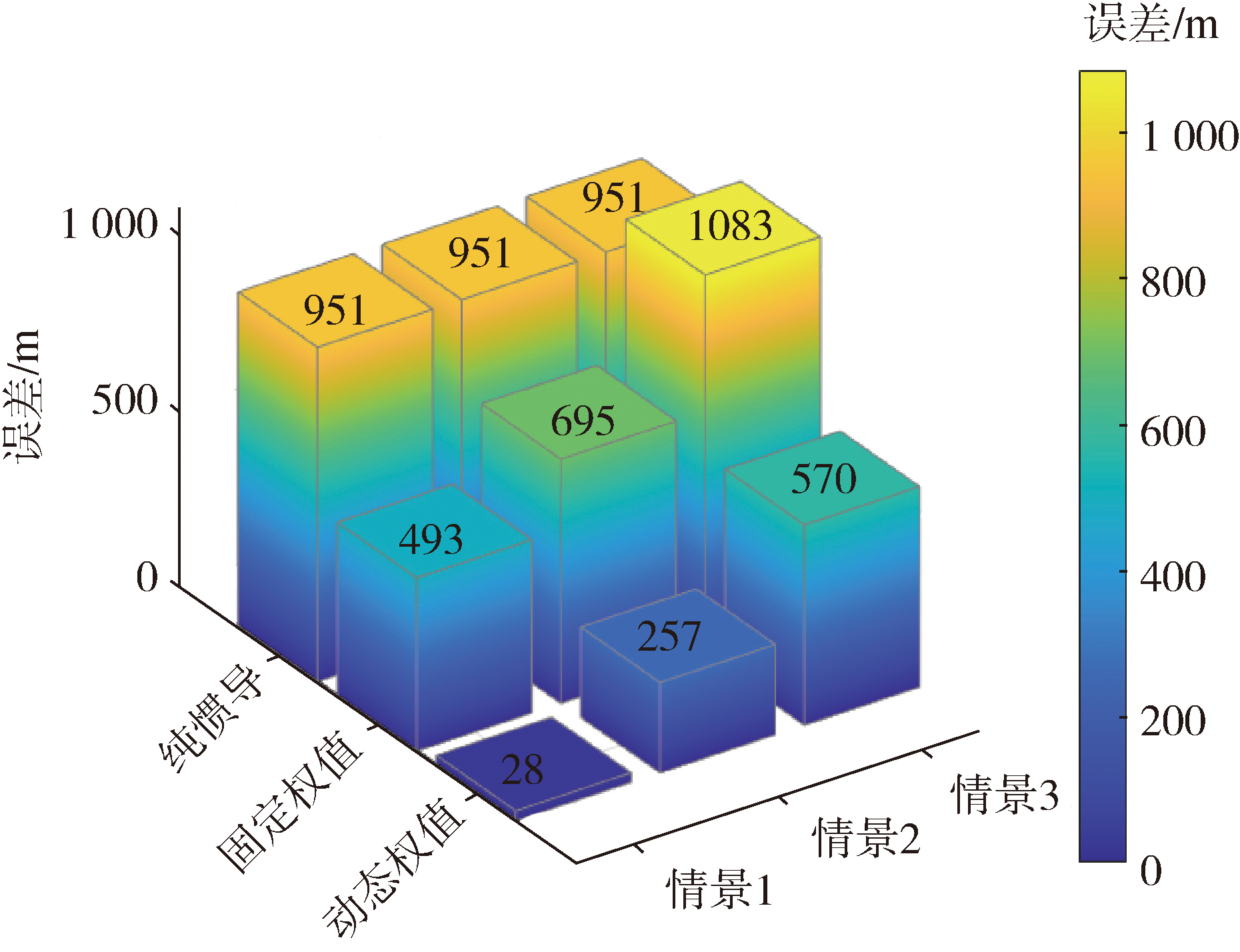
Fig.13 Statistics of navigation results for different navigation modes
| [1] |
付梦印, 邓志红, 闫莉萍, 等. Kalman滤波理论及其在导航系统中的应用[M]. 北京: 科学出版社, 2024.
|
|
|
|
| [2] |
曹正阳, 张冰, 白屹轩, 等. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(增刊2):157-166.
|
|
doi: 10.12382/bgxb.2023.0860 |
|
| [3] |
|
| [4] |
|
| [5] |
安科宇. 基于动基座传递对准的高超声速飞行器SINS/BDS/SAR组合导航技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2023.
|
|
|
|
| [6] |
王文龙, 王晓芳, 林海, 等. 拒止环境下多弹协同导航及编队优化设计[J]. 飞行力学, 2022, 40(6):61-71.
|
|
|
|
| [7] |
|
| [8] |
张新睿, 熊智, 华冰, 等. 基于惯性/天文深度融合的跨域飞行器异构多源组合导航方法[J/OL]. 航空学报. https://link.cnki.net/urlid/11.1929.v.20240528.1400.002.
|
|
|
|
| [9] |
杨龙河, 王小军. 地心地固系下天文/惯性组合导航算法[J]. 光学与光电技术, 2022, 20(6):75-81.
|
|
|
|
| [10] |
王伟东, 李革, 刘佳琪, 等. 一种基于惯导/地磁信息融合的低成本组合导航方法[J]. 导弹与航天运载技术, 2019(6):64-69.
|
|
|
|
| [11] |
景羿铭, 王融, 熊智, 等. 空天飞行器多源多余度模糊容错导航系统设计方法[J]. 兵工学报, 2020, 41(4):670-680.
doi: 10.3969/j.issn.1000-1093.2020.04.006 |
|
doi: 10.3969/j.issn.1000-1093.2020.04.006 |
|
| [12] |
|
| [13] |
何劢航, 孙付平, 肖凯, 等. 自适应前后向平滑算法在组合导航中的应用[J]. 导航定位学报, 2022, 10(6):151-156.
|
|
|
|
| [14] |
高书亮, 段鹏飞, 樊思思, 等. 面向失锁在线补偿的高超声速飞行器组合导航方法研究[J]. 航空科学技术, 2023, 34(2):19-25.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
吕嘉睿, 朱锋. 惯性推算误差抑制的神经网络自学习模型设计与验证[J]. 导航定位与授时, 2024, 11(3):66-75.
|
|
|
|
| [20] |
焦泽德, 魏宗康, 高荣荣. 面向战略导弹的新一代惯性系统[J]. 导航与控制, 2021, 20(4):1-8.
doi: 10.3969/j.issn.1674-5558.2021.04.001 |
|
|
|
| [21] |
严恭敏,
|
|
|
| [1] | WANG Yong’an, LI Dongguang, WU Hao, LIU Yang. An Adaptive Filtering-disturbance Observer-based State Estimation Algorithm for Large Ships [J]. Acta Armamentarii, 2024, 45(7): 2318-2328. |
| [2] | LIANG Yuan, QI Guoqing, CHEN Ye, LI Yinya, SHENG Andong. Event-triggered Surface Extended Target Tracking with Intermittent Measurements [J]. Acta Armamentarii, 2024, 45(4): 1219-1228. |
| [3] | SHEN Cheng, ZHANG Lianchao, ZHANG Zhuo, ZHU Wenliang, CHEN Yukang. Fire Control Correction and Line-of-sight Filtering Prediction of Lightweight Ballistic Calculation System [J]. Acta Armamentarii, 2024, 45(2): 429-442. |
| [4] | LIU Zengli, ZHANG Wen, CAO Qihong, ZHAO Xuanzhi, LIU Kang, ZENG Sai. Converted State Equation Kalman Filter for Three-dimensional Target Tracking [J]. Acta Armamentarii, 2024, 45(11): 3998-4010. |
| [5] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [6] | DENG Tingxiang, REN Peng, CHENG Jia, WANG Jianbing, LIANG Zhenjie, XIANG Zheng. Relative Positioning Technology for Two Points Based on Cluster Cooperative Orientation [J]. Acta Armamentarii, 2023, 44(S2): 22-34. |
| [7] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [8] | LIU Can, WANG Hui, LIN Defu, CUI Xiaoxi, XU Hanhui. Bearings-Only Target Tracking Algorithm with Non-Gaussian Heavy-Tailed Distributed Noise [J]. Acta Armamentarii, 2023, 44(5): 1469-1481. |
| [9] | XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles [J]. Acta Armamentarii, 2023, 44(3): 841-850. |
| [10] | WAN Xinwei, WANG Jing, YANG Hui, LI Yi, ZHANG Yuanzai, WANG Lu. A Random Error Compensation Method of MEMS Gyroscope Based on BP Neural Network Combined with PSO-Optimized Kalman Filter [J]. Acta Armamentarii, 2023, 44(2): 556-565. |
| [11] | LIU Sheng-song, CHEN Shao-hua, CHEN Chuan. Combined Algorithm for Motion Parameter Estimation of Target on Underwater Static Platform [J]. Acta Armamentarii, 2016, 37(4): 684-689. |
| [12] | LIU Ming-yong, ZHU Li, DONG Hai-xia. Research on Gyroscope Array Based on Kalman Filter [J]. Acta Armamentarii, 2016, 37(2): 272-278. |
| [13] | HUANG Xiang-yuan, TANG Xia-qing, WU Meng, WU Wei-sheng. Research on Initial Alignment of Moving Base with 5th-degree Dimensionality Reduction SR-CKF [J]. Acta Armamentarii, 2016, 37(2): 219-225. |
| [14] | ZHU Ming-qiang, HOU Jian-jun, LIU Ying , LI Xu, TIAN Hong-juan. An Time Delay Difference Estimation Algorithm Based on Improved Unscented Particle Filter Suitable for Target Tracking inWireless Sensor Network [J]. Acta Armamentarii, 2015, 36(7): 1266-1272. |
| [15] | ZENG Guang-yu, SHEN Qiang, LI Dong-guang, HE Xin. Modeling and Simulation on GNSS Vector Tracking Loop Based on Extended Kalman Filter [J]. Acta Armamentarii, 2015, 36(3): 530-538. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||