
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (9): 240940-.doi: 10.12382/bgxb.2024.0940
Previous Articles Next Articles
WANG Qi*( ), WANG Yingmin, ZHU Guolei
), WANG Yingmin, ZHU Guolei
Received:2024-10-11
Online:2025-09-24
Contact:
WANG Qi
WANG Qi, WANG Yingmin, ZHU Guolei. Underwater High Accuracy Localization Method with Lp Norm Constraints[J]. Acta Armamentarii, 2025, 46(9): 240940-.
Add to citation manager EndNote|Ris|BibTeX
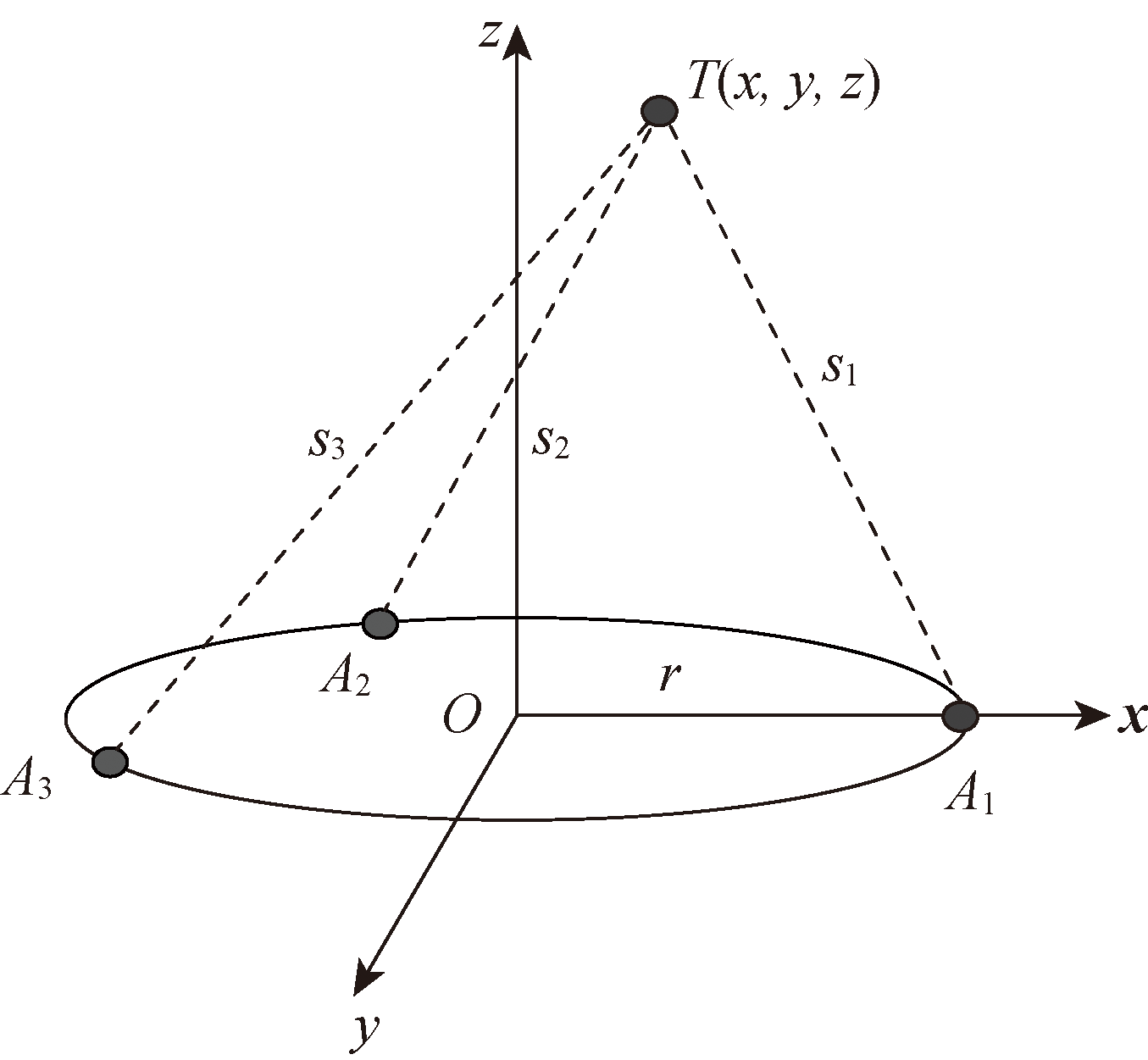
Fig.1 Array with 3 elements on the same plane
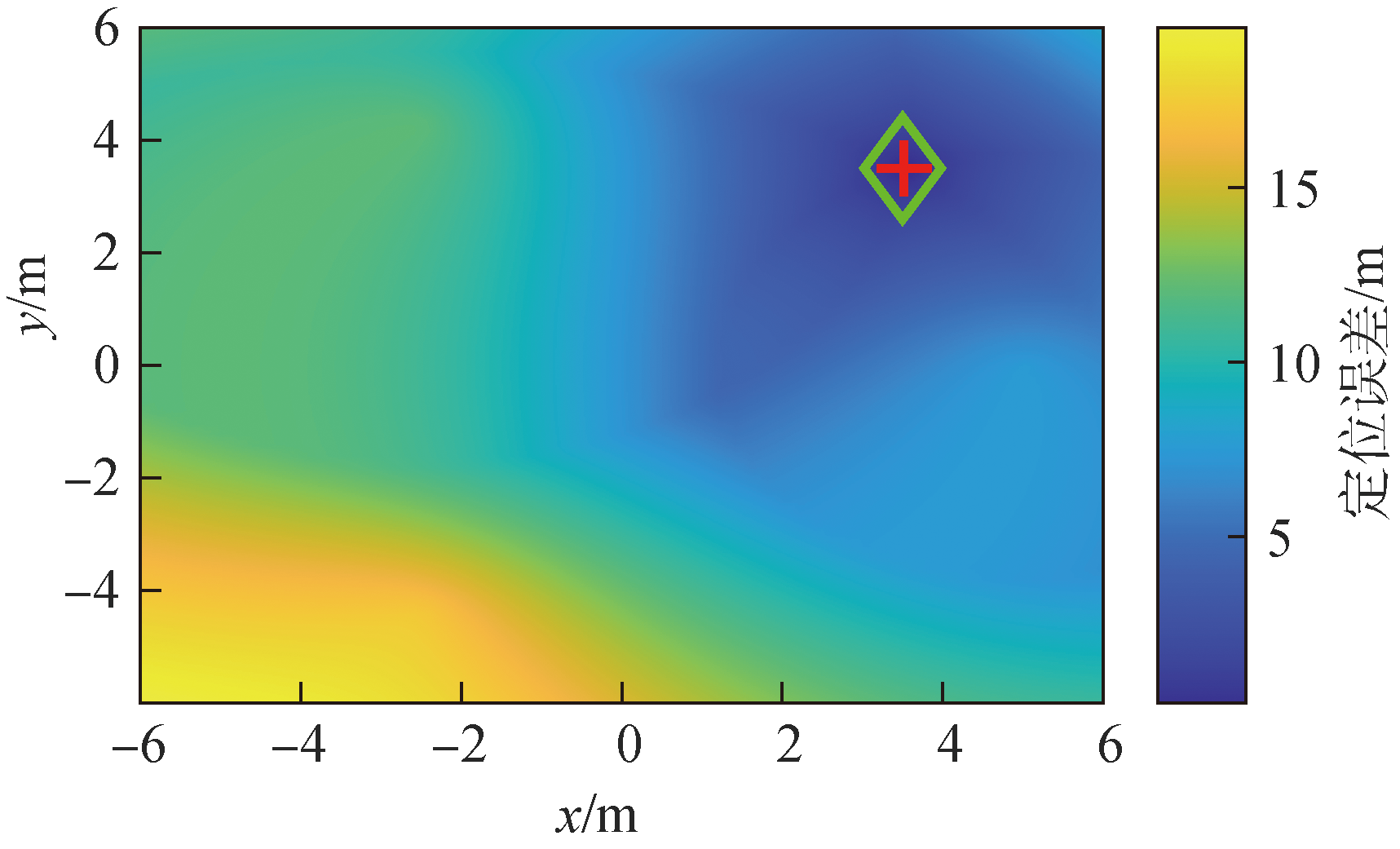
Fig.2 Localization results of LPM for the target at (3.5m,3.5m)
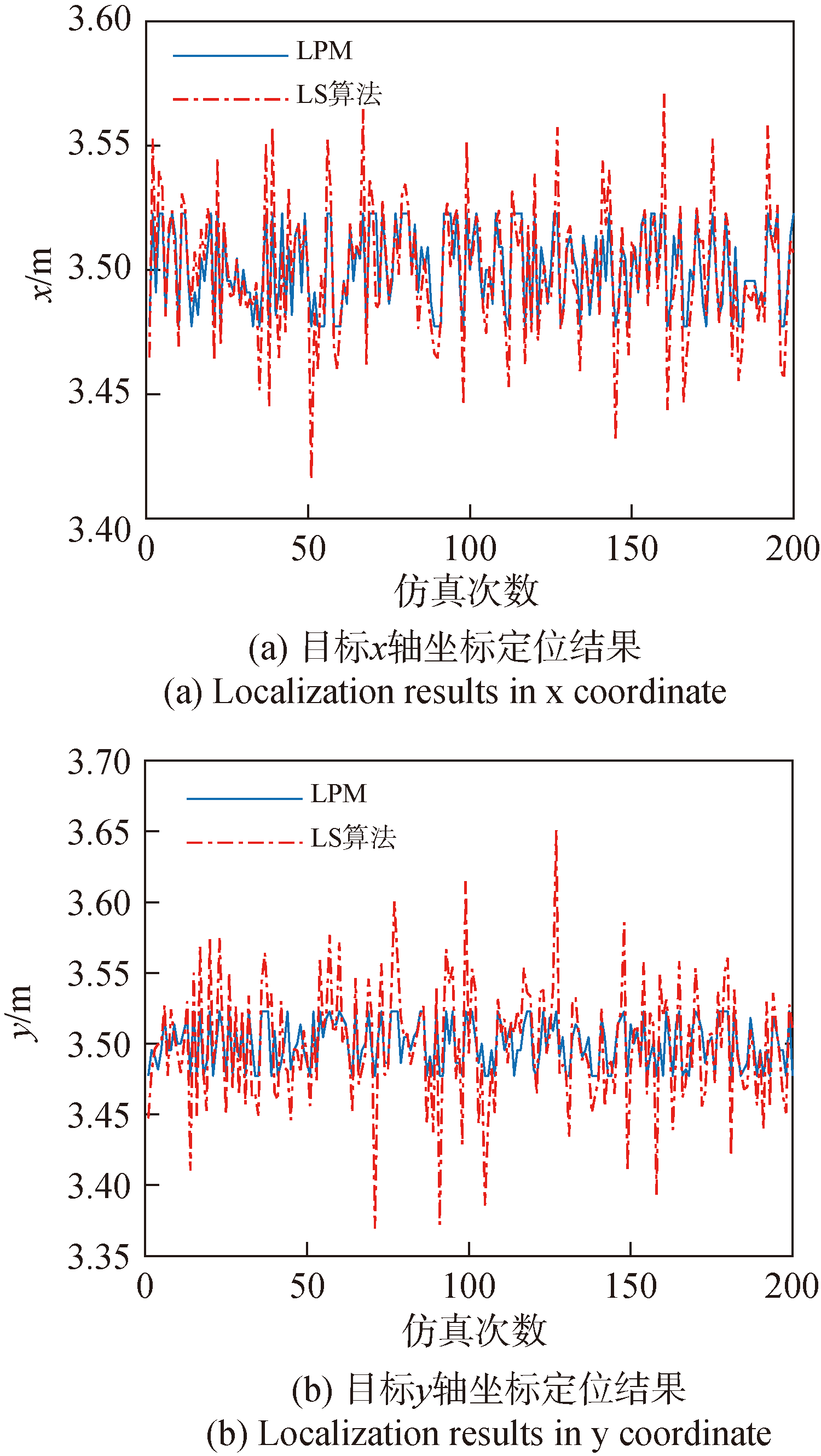
Fig.3 Comparisons of localization results of LPM and LS algorithms
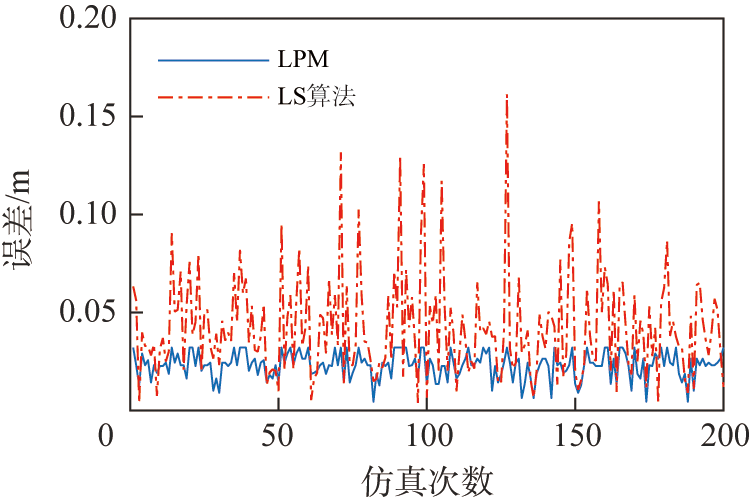
Fig.4 Comparisons of localization errors of LPM and LS algorithms
| 算法 | 参数 | 均值 | 标准差 | 方差 |
|---|---|---|---|---|
| LS算法 | x轴定位结果 | 3.5 | 0.0276 | 0.00076 |
| y轴定位结果 | 3.5 | 0.0395 | 0.0016 | |
| 定位误差 | 0.0415 | 0.0240 | ||
| LPM | x轴定位结果 | 3.5 | 0.0178 | 0.00032 |
| y轴定位结果 | 3.5 | 0.0181 | 0.00033 | |
| 定位误差 | 0.0241 | 0.0078 |
Table 1 Comparisons of localization results of LPM and LS algorithms at (3.5m,3.5m) m
| 算法 | 参数 | 均值 | 标准差 | 方差 |
|---|---|---|---|---|
| LS算法 | x轴定位结果 | 3.5 | 0.0276 | 0.00076 |
| y轴定位结果 | 3.5 | 0.0395 | 0.0016 | |
| 定位误差 | 0.0415 | 0.0240 | ||
| LPM | x轴定位结果 | 3.5 | 0.0178 | 0.00032 |
| y轴定位结果 | 3.5 | 0.0181 | 0.00033 | |
| 定位误差 | 0.0241 | 0.0078 |
| 蒙特卡洛次数 | 时间/s | |
|---|---|---|
| LS算法 | LPM | |
| 500 | 0.032 | 6.02 |
| 1000 | 0.050 | 12.02 |
| 1500 | 0.070 | 17.92 |
| 2000 | 0.088 | 23.89 |
Table 2 Comparison of computational speeds of LPM and LS algorithms at (3.5m,3.5m)
| 蒙特卡洛次数 | 时间/s | |
|---|---|---|
| LS算法 | LPM | |
| 500 | 0.032 | 6.02 |
| 1000 | 0.050 | 12.02 |
| 1500 | 0.070 | 17.92 |
| 2000 | 0.088 | 23.89 |
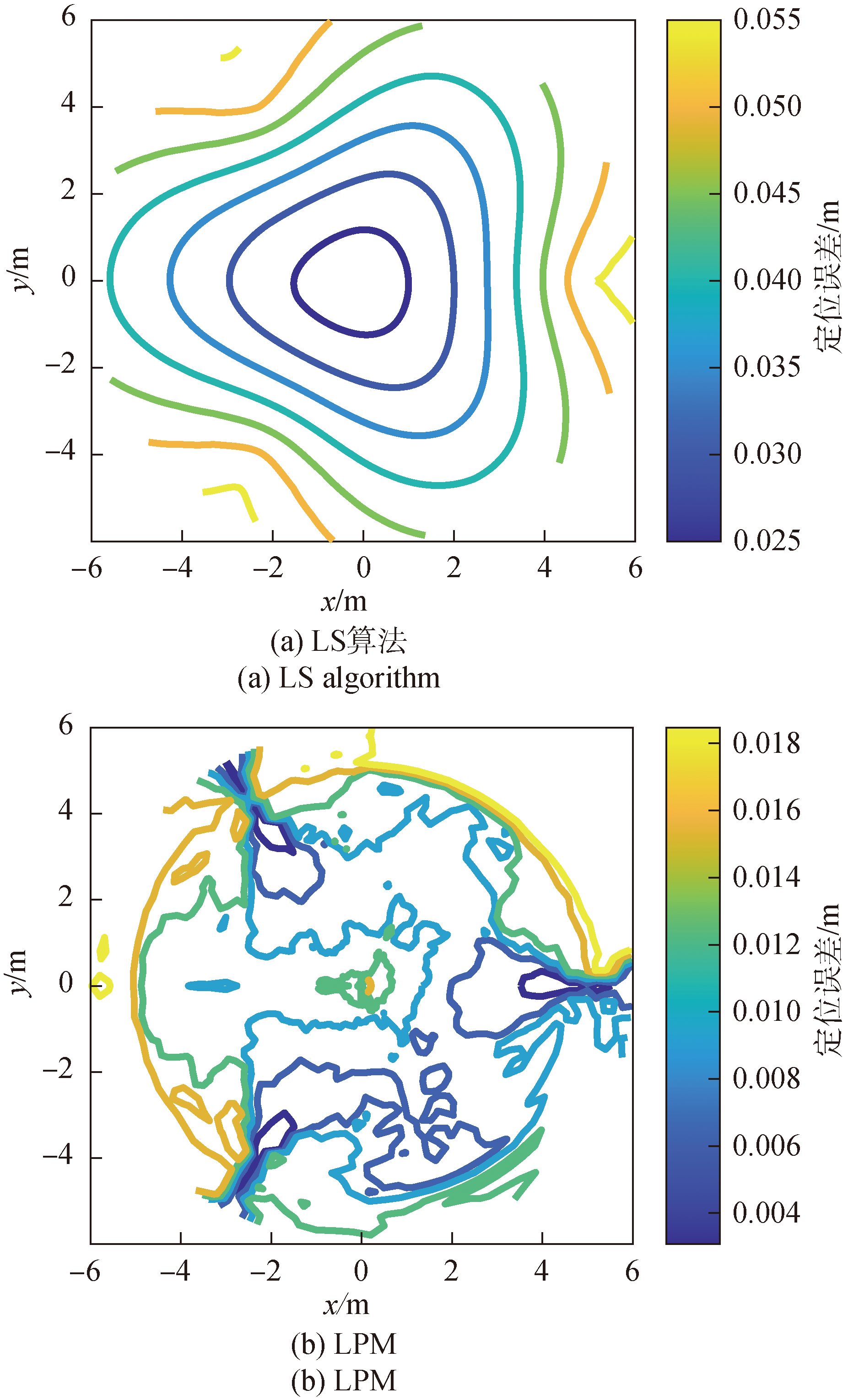
Fig.5 Contour map of localization error
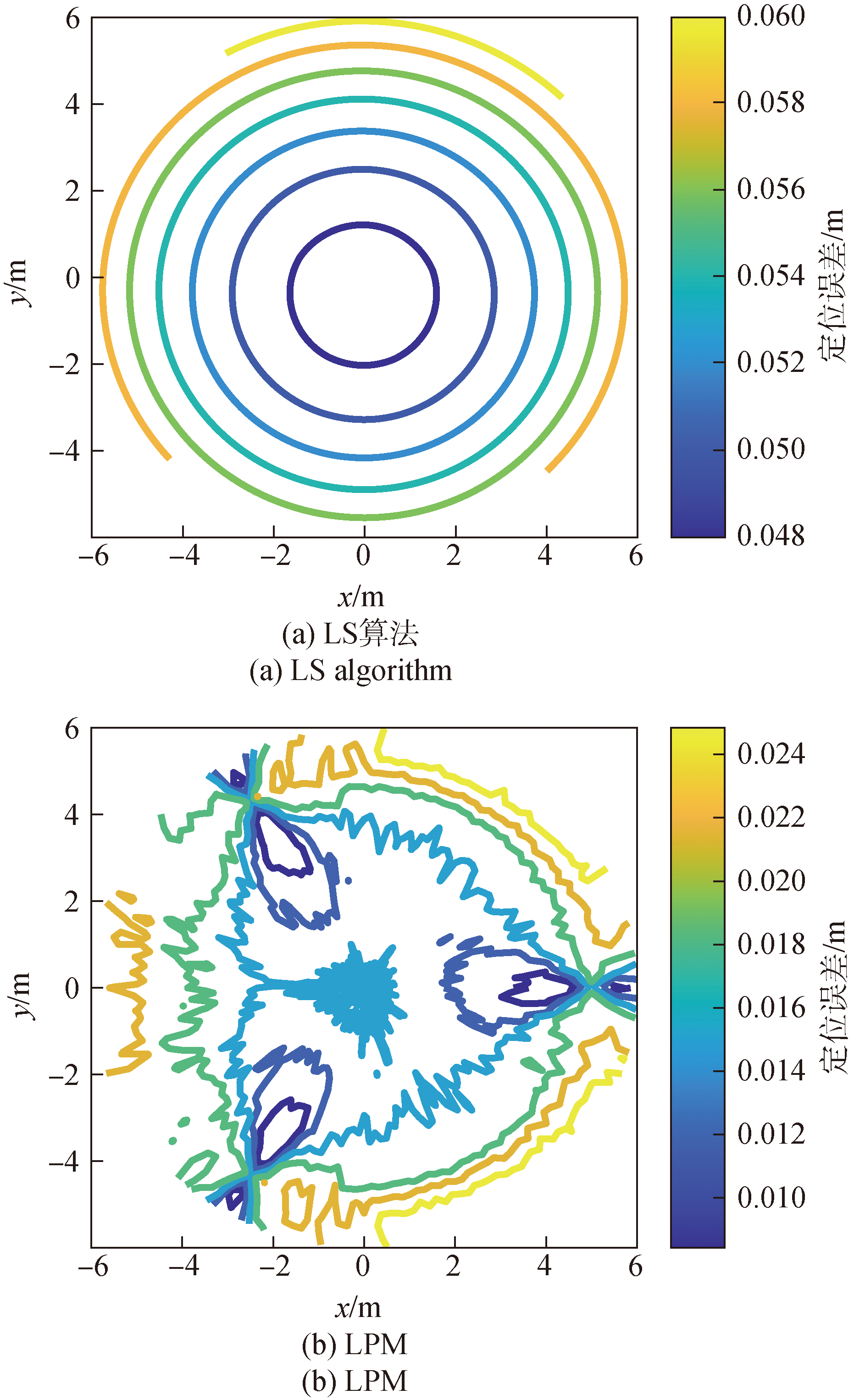
Fig.6 Contour map of localization error with the slice height of 6m
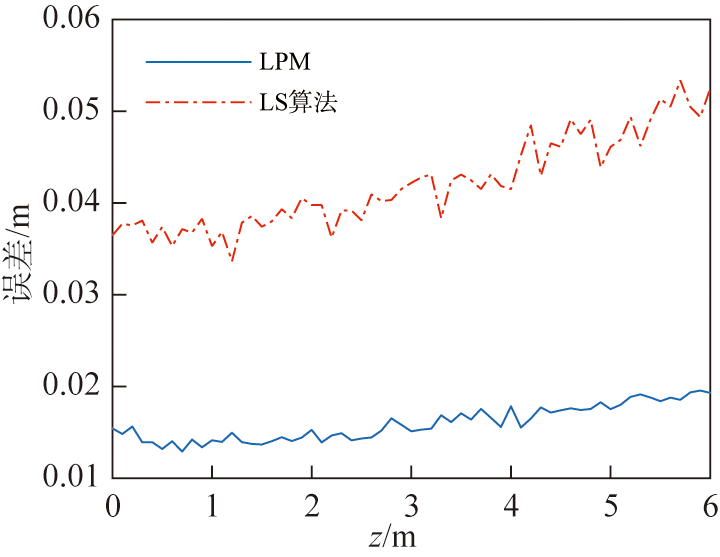
Fig.7 Average error curve of Oxy slice at different heights
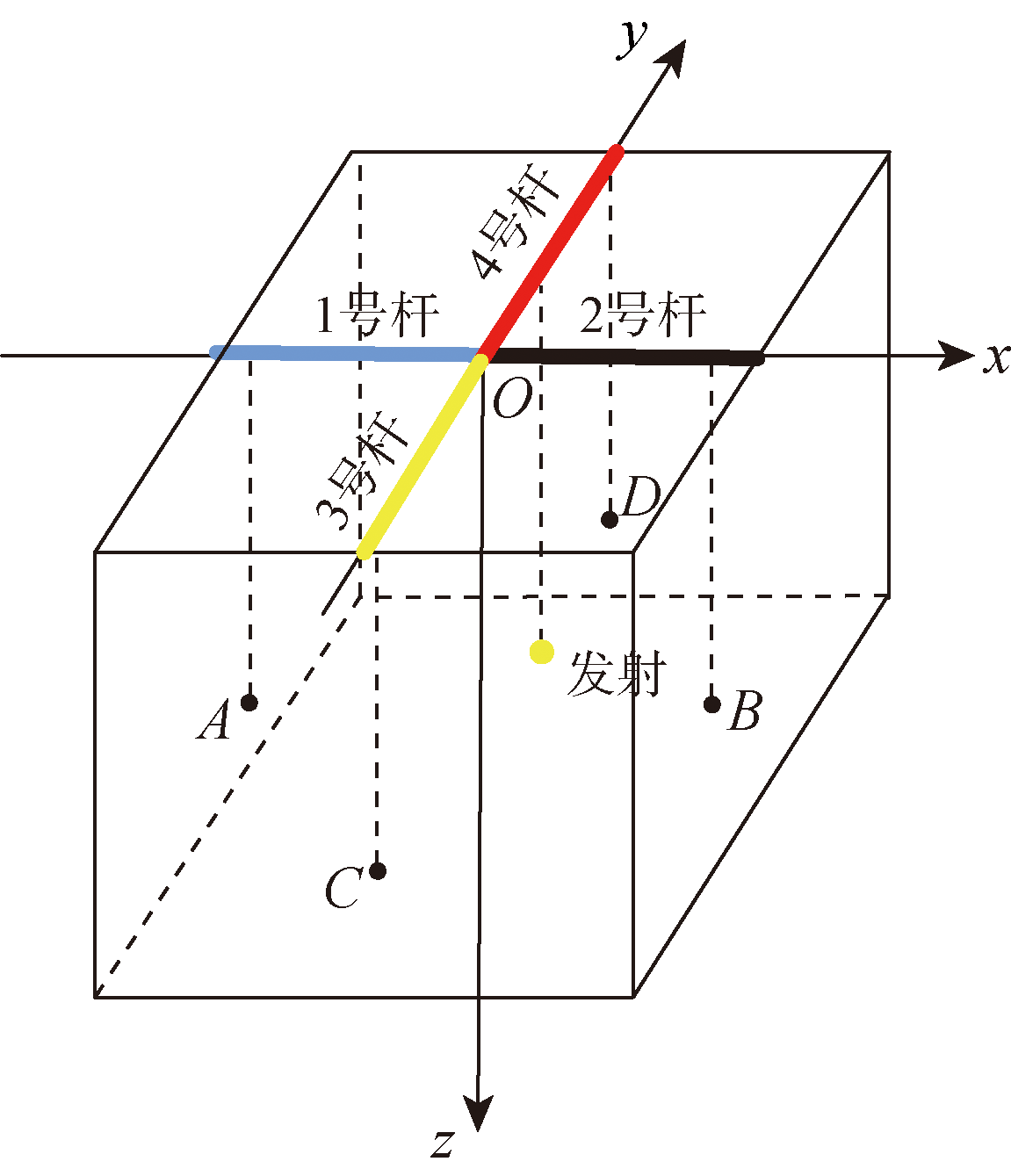
Fig.8 Spatial structures of receiving array and transmitting source
| 接收阵元 | x | y | z |
|---|---|---|---|
| A | -260.88 | 0 | -451.3 |
| B | 261.30 | 0 | -452.5 |
| C | 0 | -260.82 | -474.8 |
| D | 0 | 261.82 | -471.1 |
Table 3 Coordinates for receiving array elements cm
| 接收阵元 | x | y | z |
|---|---|---|---|
| A | -260.88 | 0 | -451.3 |
| B | 261.30 | 0 | -452.5 |
| C | 0 | -260.82 | -474.8 |
| D | 0 | 261.82 | -471.1 |
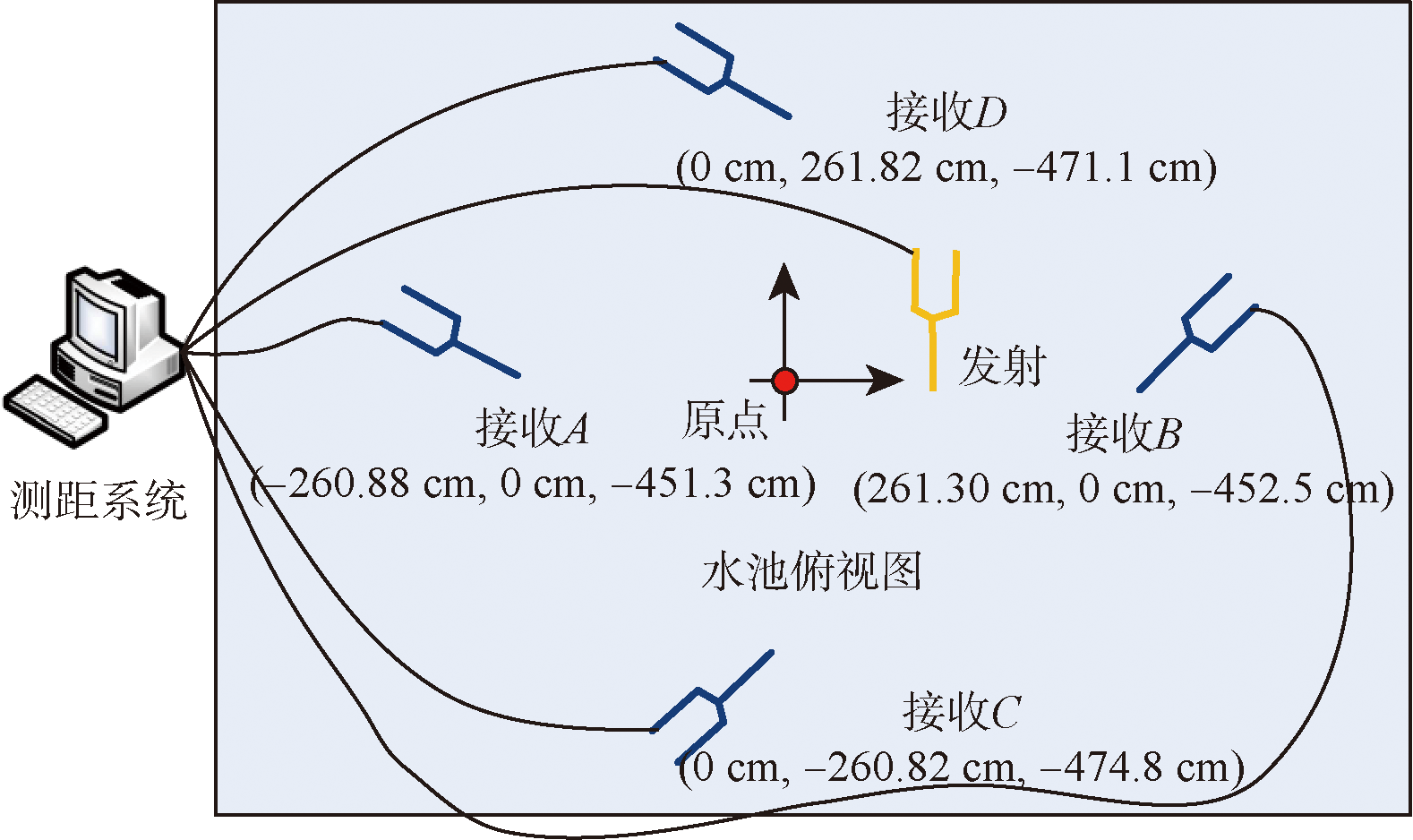
Fig.9 Top view of equipment connection and array arrangement
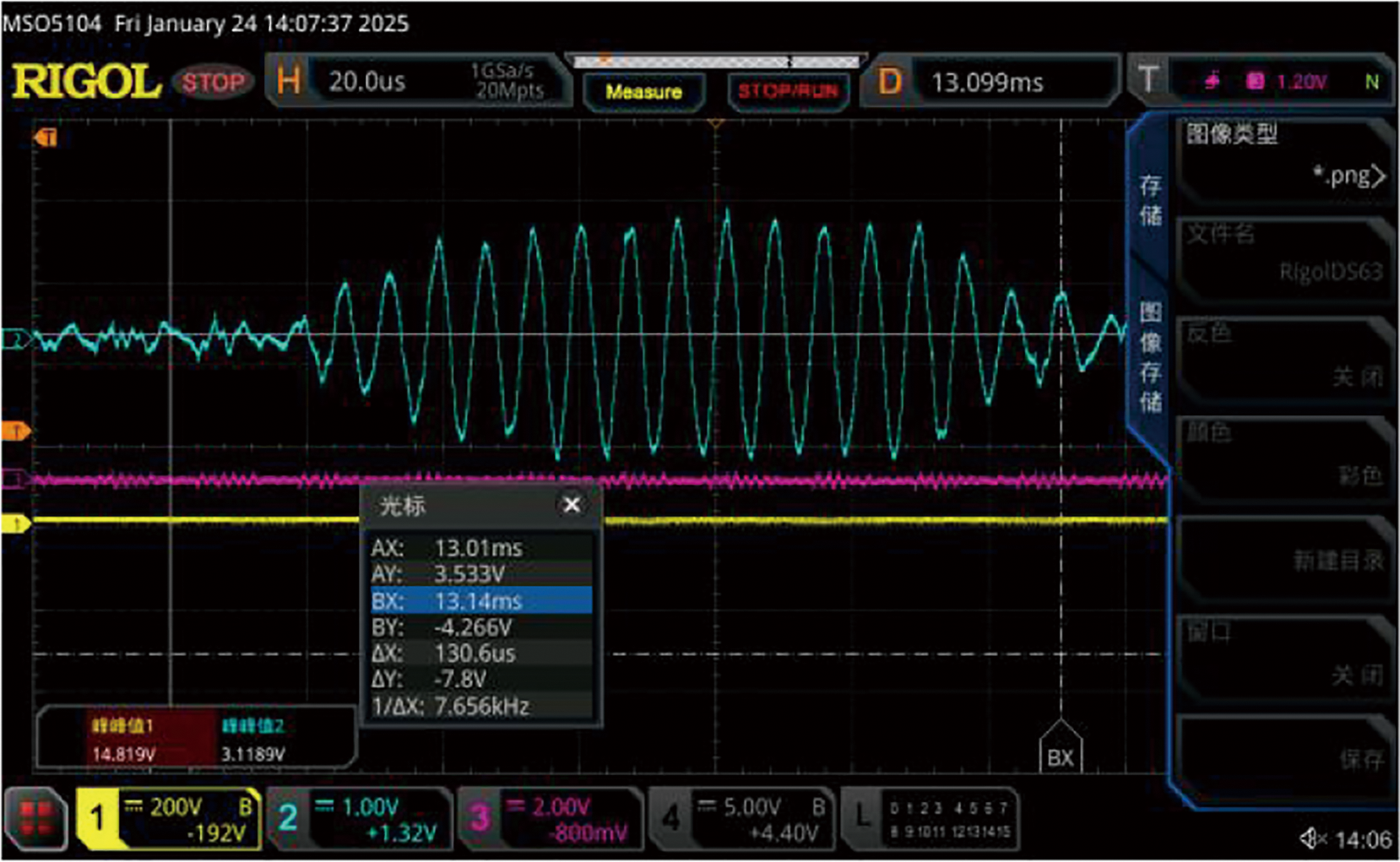
Fig.10 Waveform of signal received by the hydrophone
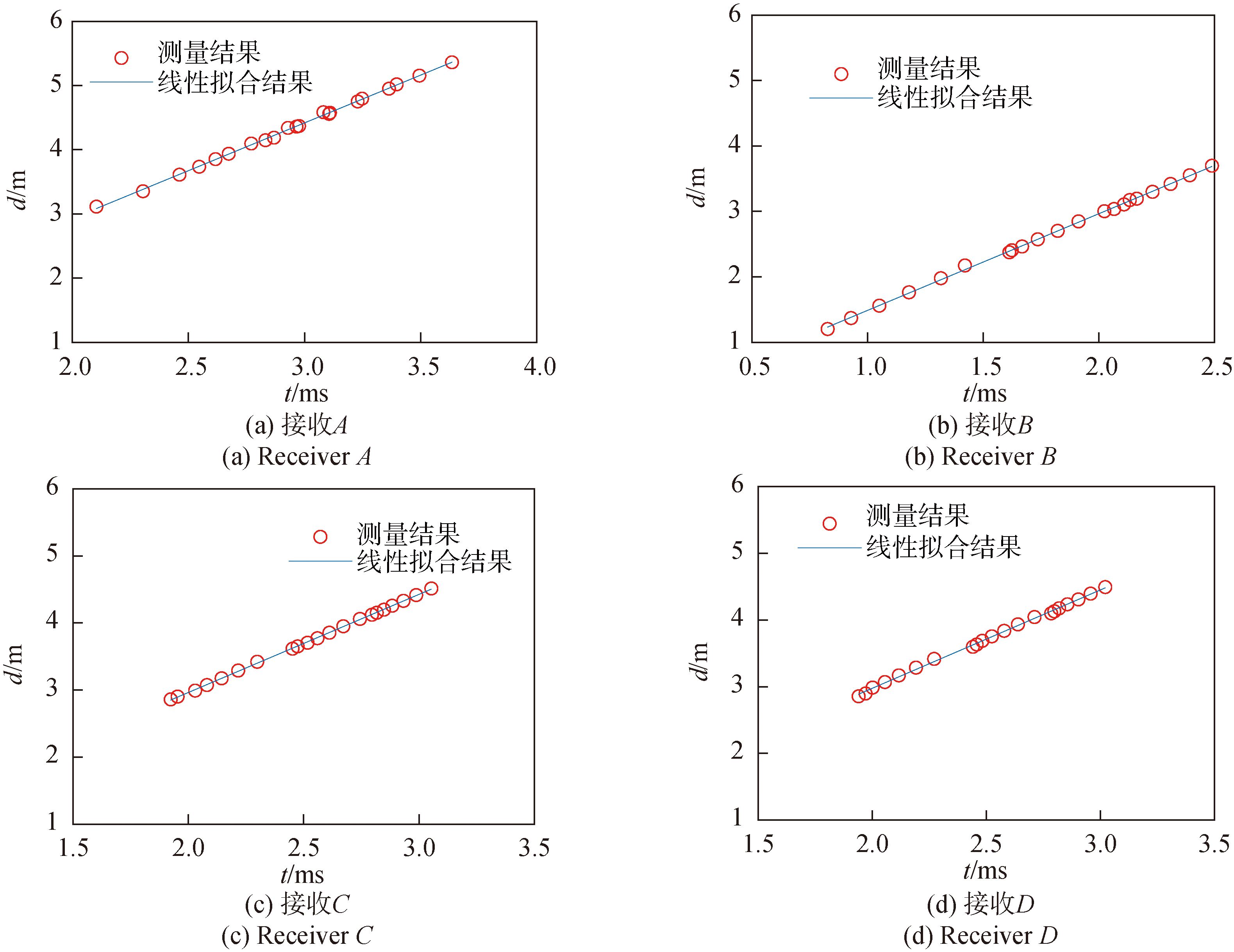
Fig.11 Measurement for the sound velocity in water
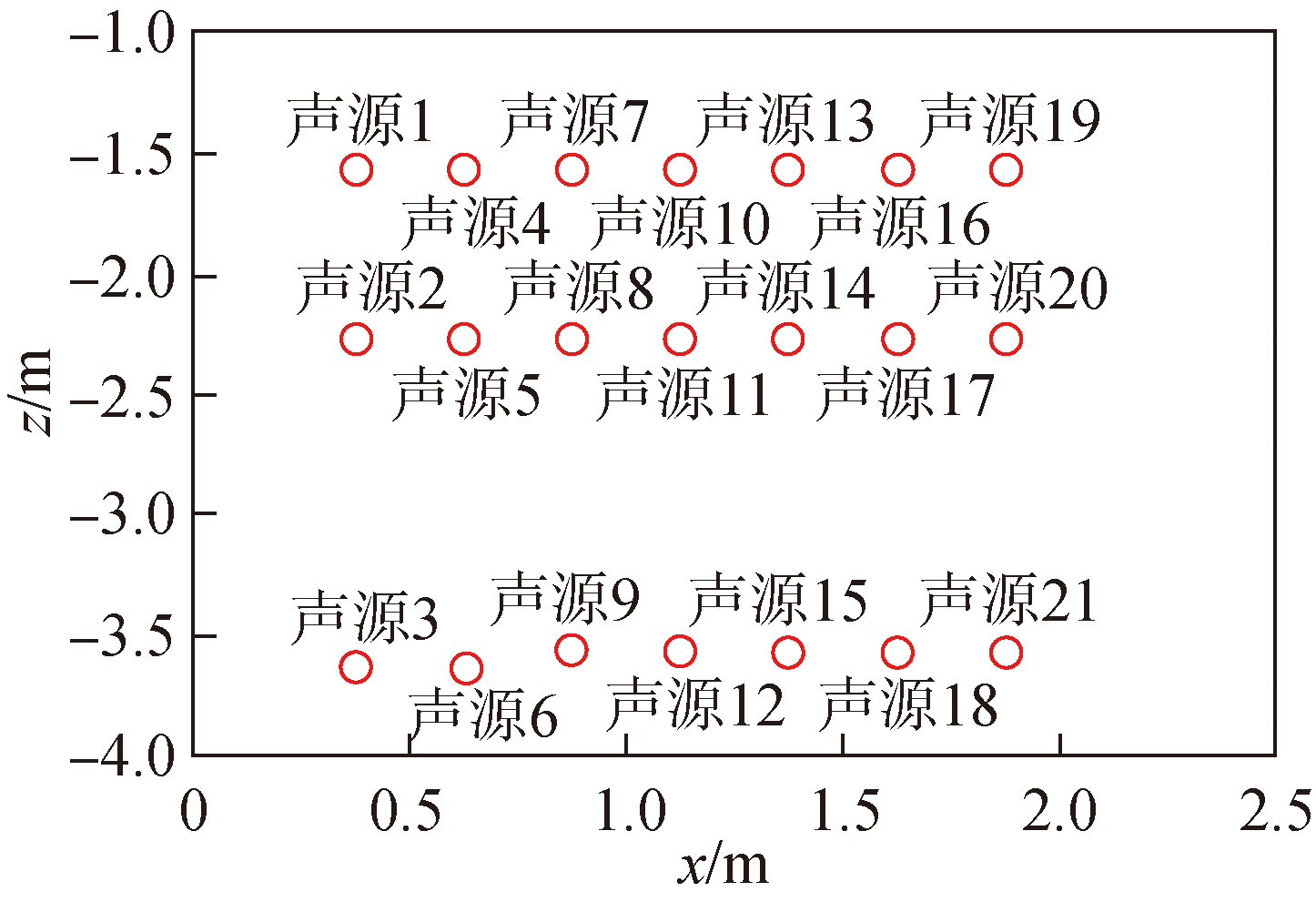
Fig.12 Real position of acoustic source
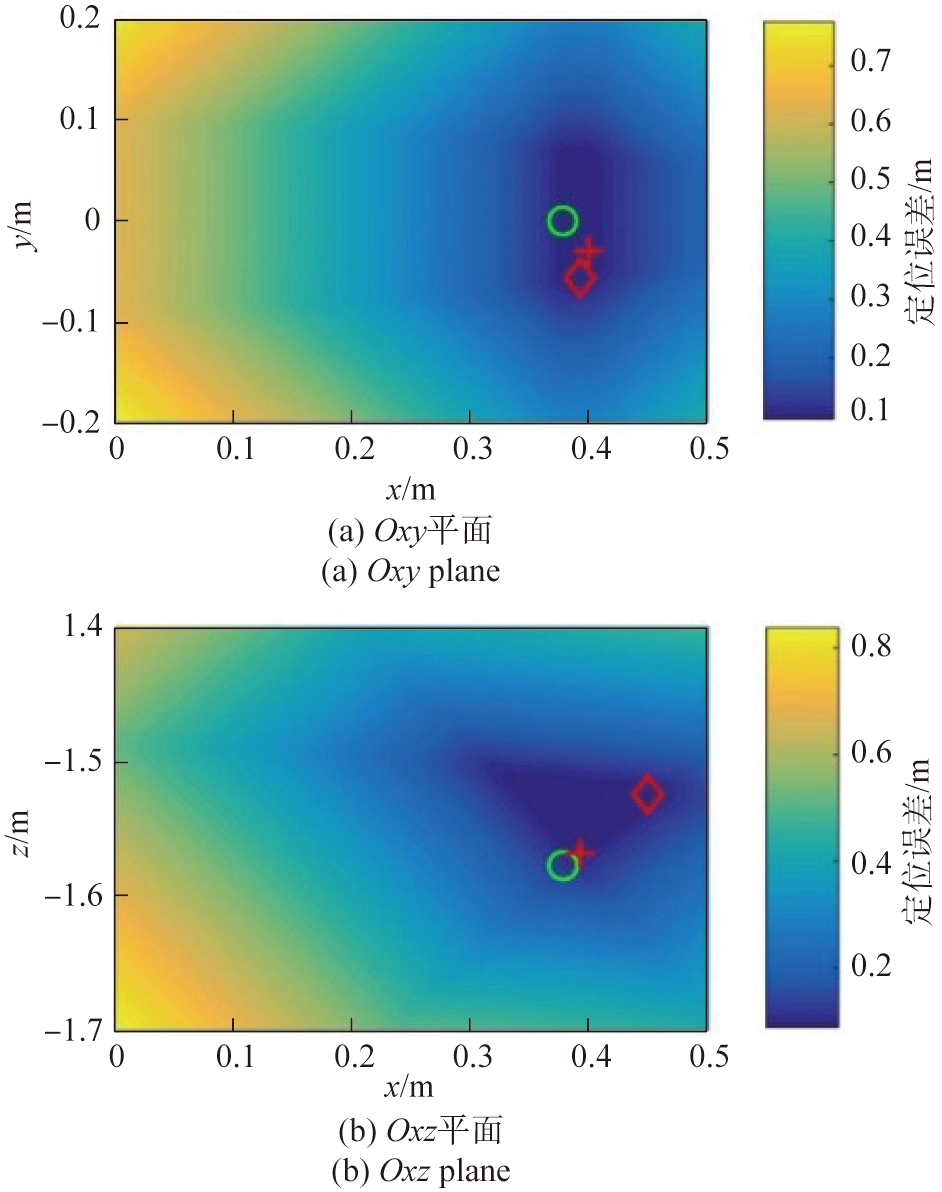
Fig.13 Localization results for acoustic source 1 using LPM and LS algorithms
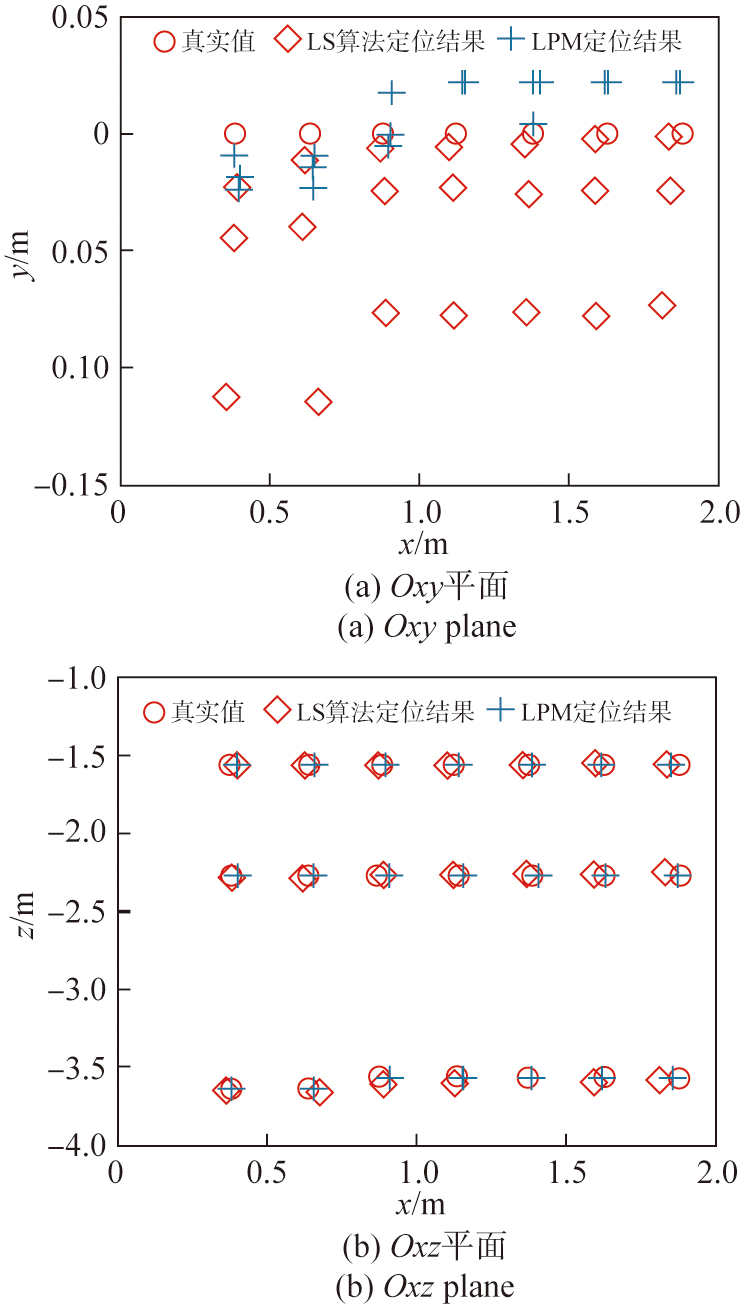
Fig.14 Localization results of LPM and LS algorithms
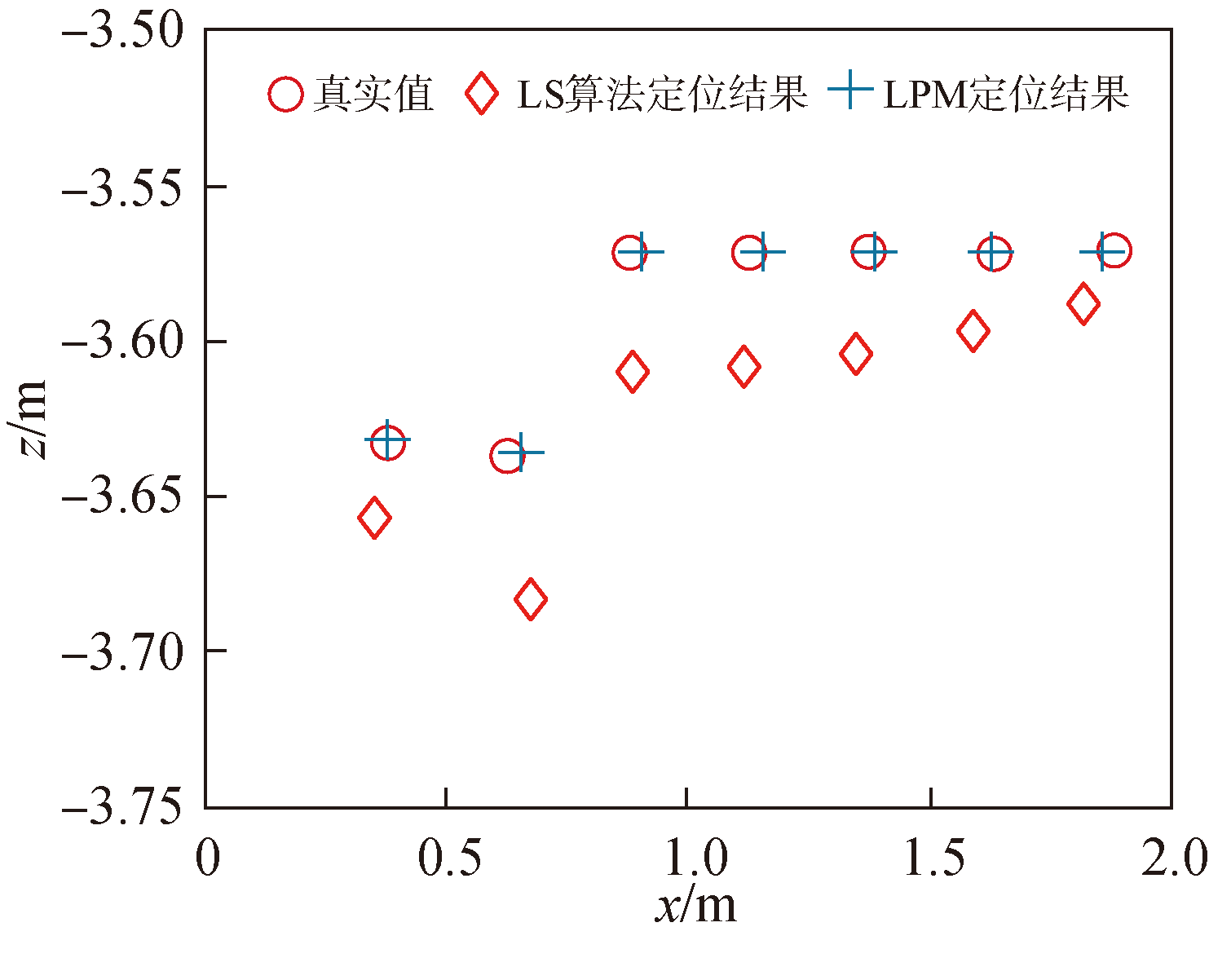
Fig.15 Partially enlarged view of localization results of LPM and LS algorithms on the Oxz plane
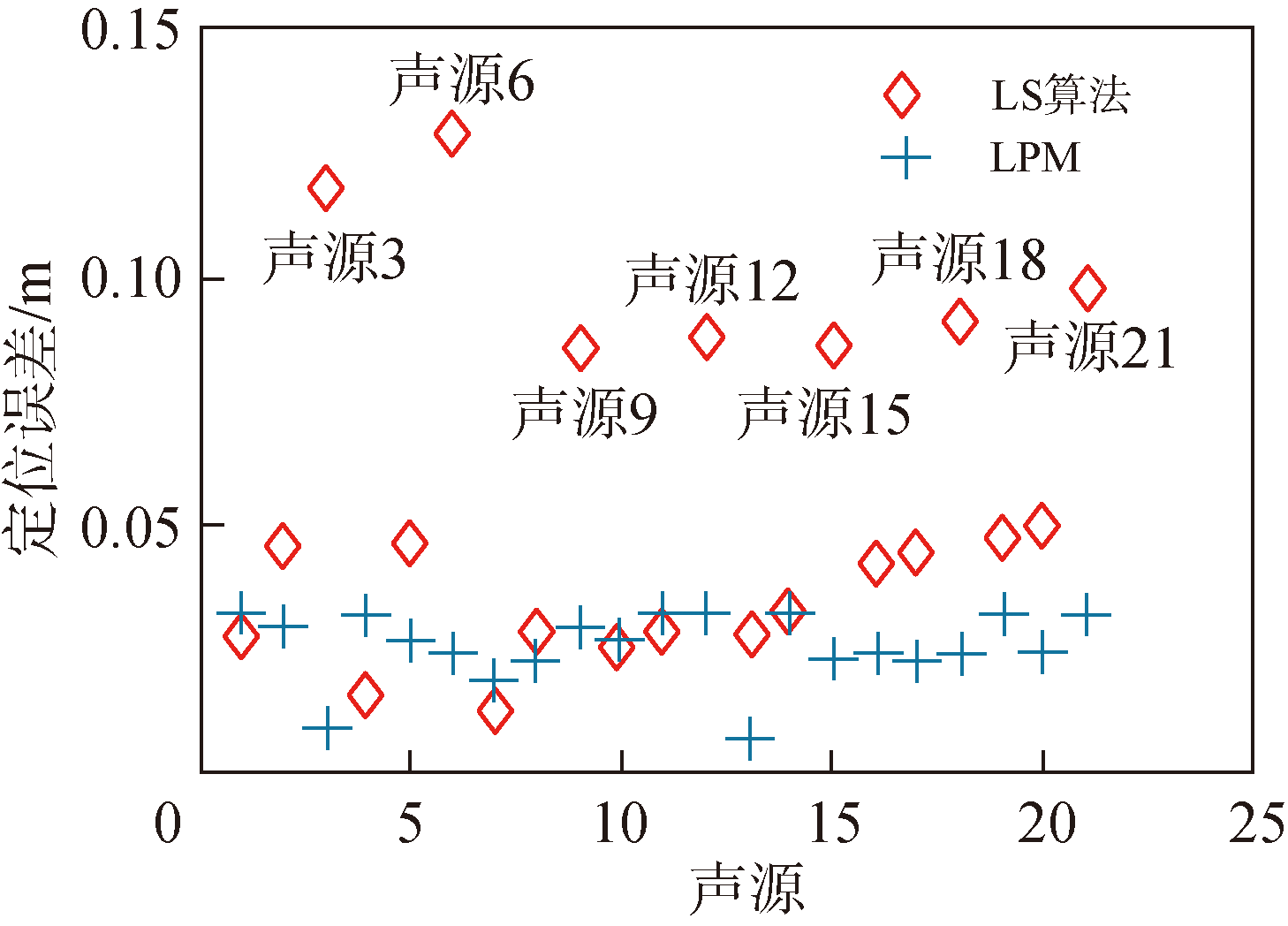
Fig.16 Comparisons of localization errors of LPM and LS algorithms
| 算法 | 参数 | 均值 | 标准差 |
|---|---|---|---|
| LS算法 | x轴定位结果 | -0.0183 | 0.0233 |
| y轴定位结果 | -0.0413 | 0.0363 | |
| z轴定位结果 | -0.0127 | 0.0161 | |
| 定位误差 | 0.0555 | 0.0345 | |
| LPM | x轴定位结果 | 0.0093 | 0.0161 |
| y轴定位结果 | 0.0082 | 0.0178 | |
| z轴定位结果 | 0.0010 | 0.0020 | |
| 定位误差 | 0.0256 | 0.0072 | |
| 两算法绝 对值差 | x轴定位结果 | 0.0090 | 0.0072 |
| y轴定位结果 | 0.0331 | 0.00185 | |
| z轴定位结果 | 0.0117 | 0.0141 | |
| 定位误差 | 0.0299 | 0.0273 |
Table 4 Quantitative localization results of LPM and LS algorithms m
| 算法 | 参数 | 均值 | 标准差 |
|---|---|---|---|
| LS算法 | x轴定位结果 | -0.0183 | 0.0233 |
| y轴定位结果 | -0.0413 | 0.0363 | |
| z轴定位结果 | -0.0127 | 0.0161 | |
| 定位误差 | 0.0555 | 0.0345 | |
| LPM | x轴定位结果 | 0.0093 | 0.0161 |
| y轴定位结果 | 0.0082 | 0.0178 | |
| z轴定位结果 | 0.0010 | 0.0020 | |
| 定位误差 | 0.0256 | 0.0072 | |
| 两算法绝 对值差 | x轴定位结果 | 0.0090 | 0.0072 |
| y轴定位结果 | 0.0331 | 0.00185 | |
| z轴定位结果 | 0.0117 | 0.0141 | |
| 定位误差 | 0.0299 | 0.0273 |
| [1] |
张永鹏, 杨长根. 从大亚湾到江门中微子实验[J]. 中国科学:物理学力学天文学, 2021, 51(9):6-17.
|
|
|
|
| [2] |
|
| [3] |
王鹏, 潘笑, 温雯, 等. 水下通信定位导航技术分析及一体化展望[J]. 舰船科学技术, 2021, 43(5):134-138.
|
|
|
|
| [4] |
毛卫宁. 水下被动定位方法回顾与展望[J]. 东南大学学报(自然科学版), 2001, 31(6):129-132.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
姜可宇, 姚直象, 尹敬湘. 一种基于三元阵的水下目标被动定位方法[J]. 兵工学报, 2012, 33(9):1107-1111.
|
|
|
|
| [10] |
|
| [11] |
黎佳艺, 周建波, 李少猛, 等. 基于频差匹配场的水下宽带高频目标被动定位[J]. 水下无人系统学报, 2025, 33(1):74-83.
|
|
|
|
| [12] |
|
| [13] |
冯旭东, 尹飞星, 李琦, 等. 基于长基线落点目标定位技术[J]. 指挥控制与仿真, 2024, 46(6):87-91.
doi: 10.3969/j.issn.1673-3819.2024.06.014 |
|
|
|
| [14] |
|
| [15] |
王领, 申晓红, 康玉柱, 等. 水声传感器网络信号到达时间差目标定位的最小二乘法估计性能[J]. 兵工学报, 2020, 41(3):542-551.
doi: 10.3969/j.issn.1000-1093.2020.03.015 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.015 |
|
| [16] |
|
| [17] |
徐复, 惠俊英, 余赟. 三点法被动定位误差分析及修正[J]. 兵工学报, 2010, 31(9):1169-1173.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
行鸿彦, 唐娟. 时延估计方法的分析[J]. 声学技术, 2008, 27(1):110-114.
|
|
|
|
| [21] |
|
| [22] |
张建方. 关于误差的传递公式[J]. 数理统计与应用概率, 1995, 10(3):57-70.
|
|
|
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||