
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (3): 240154-.doi: 10.12382/bgxb.2024.0154
Previous Articles Next Articles
NAN Wenjiang, YAN Xunliang*( ), YANG Yuxuan, WANG Peichen
), YANG Yuxuan, WANG Peichen
Received:2024-03-05
Online:2025-03-26
Contact:
YAN Xunliang
NAN Wenjiang, YAN Xunliang, YANG Yuxuan, WANG Peichen. Rapid Planning of Longitudinal-lateral Comprehensive Control Reentry Gliding Trajectory Considering Time Constraints[J]. Acta Armamentarii, 2025, 46(3): 240154-.
Add to citation manager EndNote|Ris|BibTeX
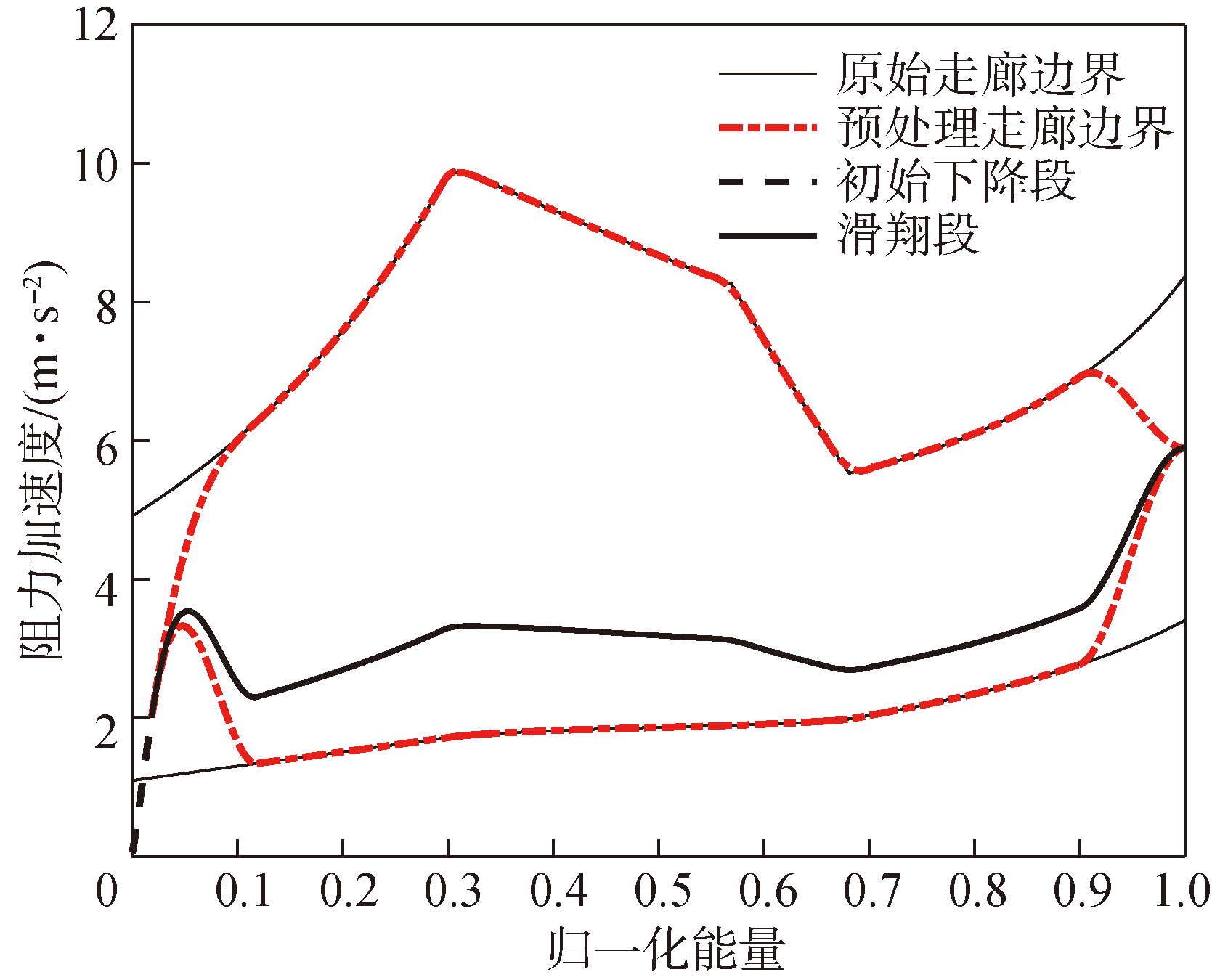
Fig.1 Schematic diagram of drag acceleration profile

Fig.2 The ground trajectory corresponding to two bank reversals
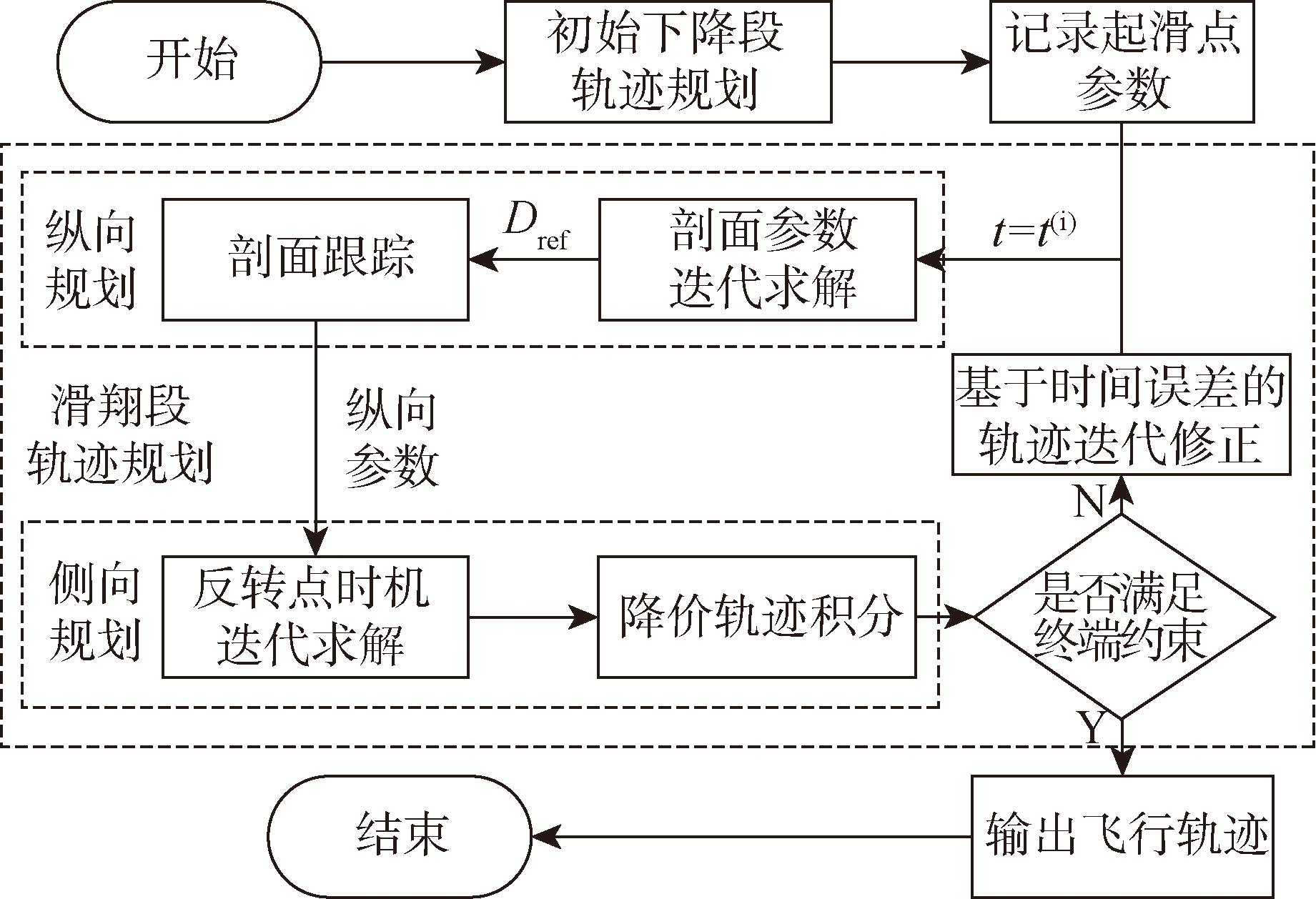
Fig.3 Flowchart of 3-DOF trajectory generation algorithm
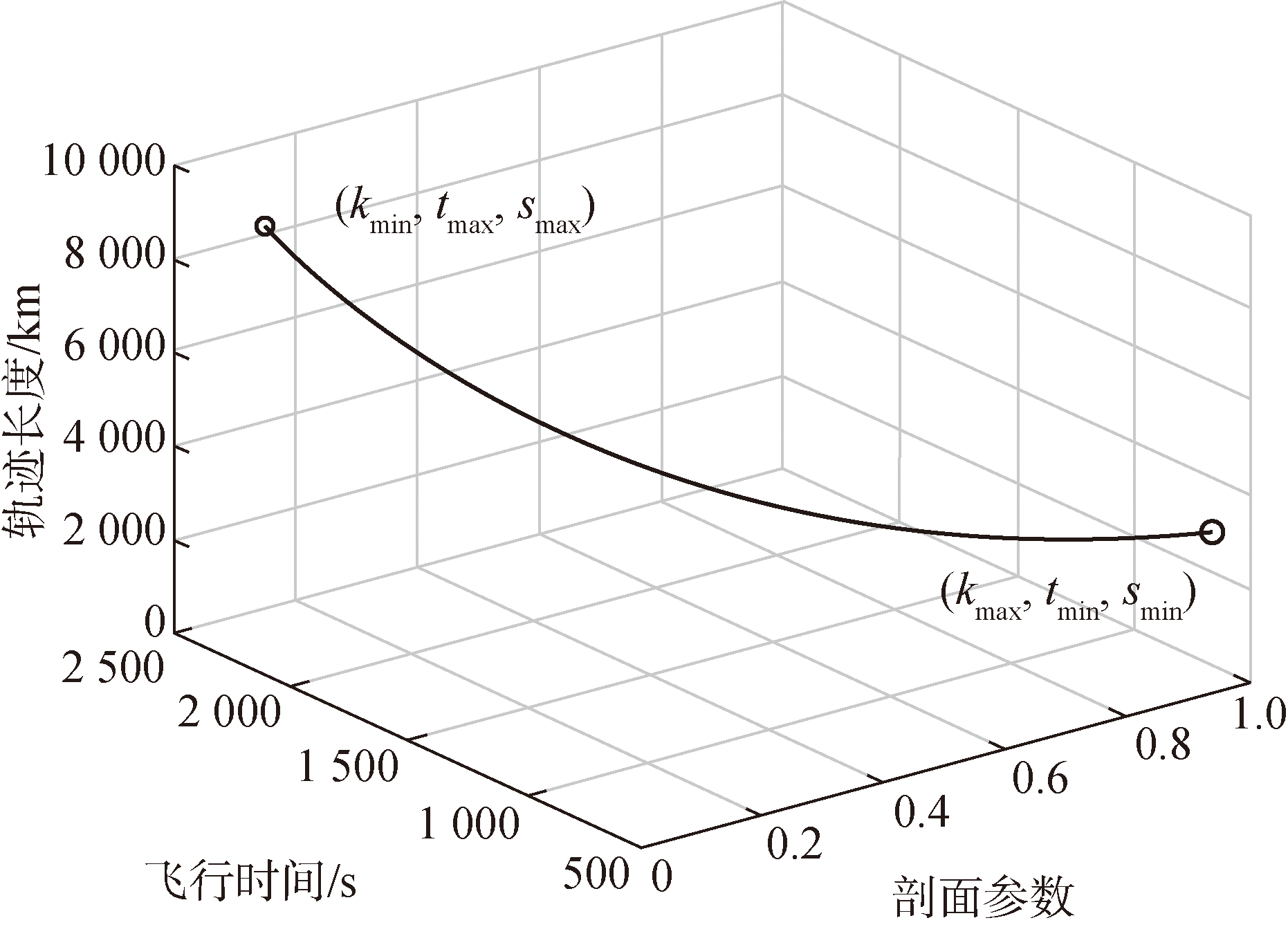
Fig.4 Trajectory length and flight time adjustable range
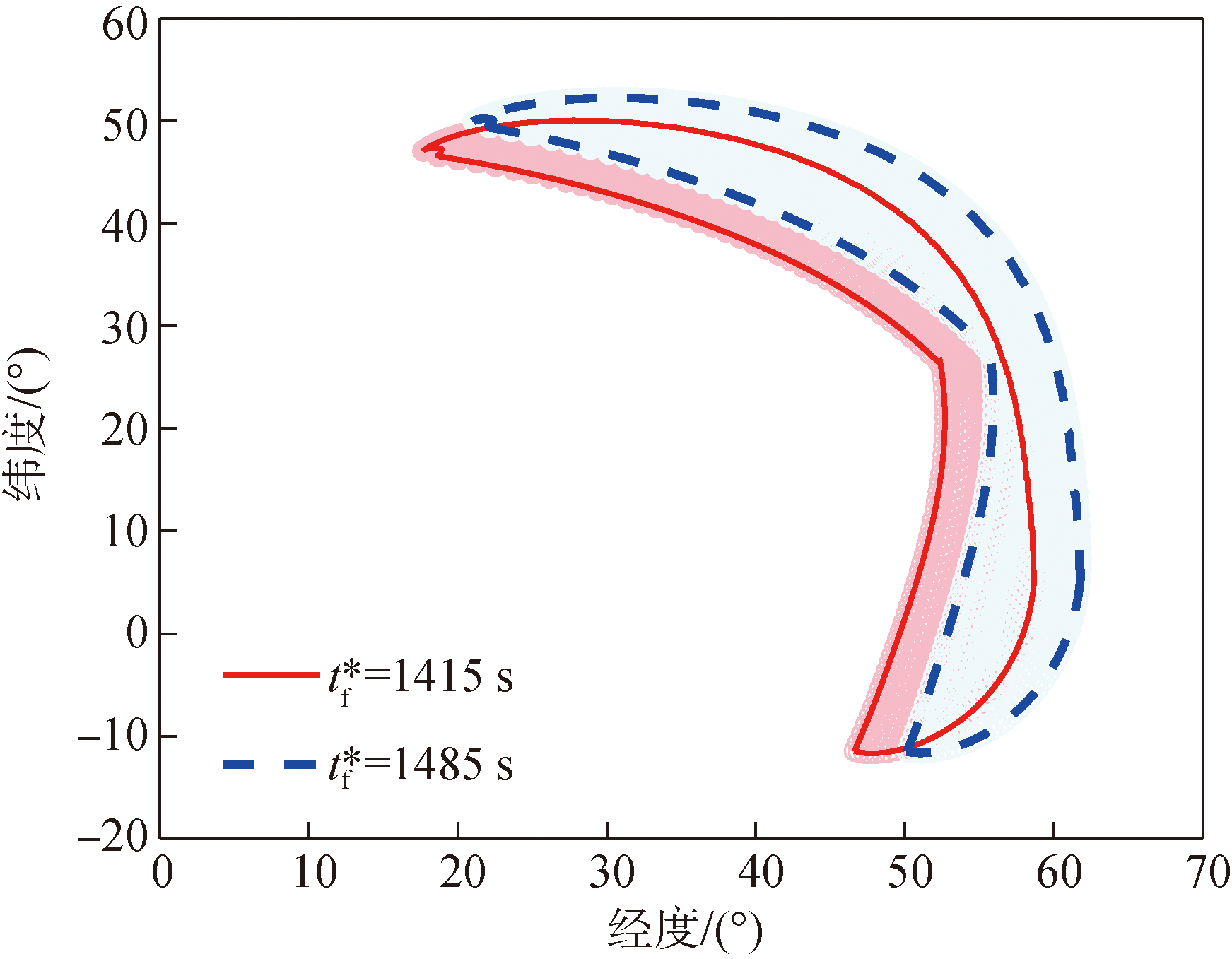
Fig.5 Reachable area at a given flight time
Fig.6 Length and time adjustable range for fixed target point
| 时间调控方法 | 时间可调范围占比/% |
|---|---|
| 本文方法 | 15.4 |
| 文献[7]方法 | 13.5 |
| 文献[10]方法 | 8.5 |
| 文献[14]方法 | 5.8 |
| 文献[15]方法 | 5.4 |
| 文献[16]方法 | 5.0 |
Table 1 Comparison of the proportions of adjustable time range in different methods
| 时间调控方法 | 时间可调范围占比/% |
|---|---|
| 本文方法 | 15.4 |
| 文献[7]方法 | 13.5 |
| 文献[10]方法 | 8.5 |
| 文献[14]方法 | 5.8 |
| 文献[15]方法 | 5.4 |
| 文献[16]方法 | 5.0 |
| 算例 | λ0/ (°) | ϕ0/ (°) | σ0/ (°) | / (°) | / (°) | /s |
|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 50 | 50 | 10 | 1190 |
| 2 | 0 | 0 | 50 | 50 | 10 | 1390 |
| 3 | 3 | 0 | 60 | 45 | 45 | 1410 |
| 4 | 0 | 0 | 50 | 50 | 40 | 1520 |
Table 2 Simulation conditions for trajectory planning algorithm
| 算例 | λ0/ (°) | ϕ0/ (°) | σ0/ (°) | / (°) | / (°) | /s |
|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 50 | 50 | 10 | 1190 |
| 2 | 0 | 0 | 50 | 50 | 10 | 1390 |
| 3 | 3 | 0 | 60 | 45 | 45 | 1410 |
| 4 | 0 | 0 | 50 | 50 | 40 | 1520 |
| 算法性能参数 | 算例1 | 算例2 | 算例3 | 算例4 |
|---|---|---|---|---|
| Δhf/m | 0.7921 | 0.7922 | 0.7923 | 0.8062 |
| Δvf/(m·s-1) | 0.1778 | 0.1712 | 0.1839 | 0.1721 |
| Δs/m | 254.88 | 142.83 | 454.27 | 318.71 |
| Δtf/s | 0.1681 | 0.1382 | 0.1329 | 0.1187 |
| 计算耗时/s | 1.52 | 1.56 | 1.57 | 1.63 |
Table 3 Terminal errors corresponding to different simulation conditions
| 算法性能参数 | 算例1 | 算例2 | 算例3 | 算例4 |
|---|---|---|---|---|
| Δhf/m | 0.7921 | 0.7922 | 0.7923 | 0.8062 |
| Δvf/(m·s-1) | 0.1778 | 0.1712 | 0.1839 | 0.1721 |
| Δs/m | 254.88 | 142.83 | 454.27 | 318.71 |
| Δtf/s | 0.1681 | 0.1382 | 0.1329 | 0.1187 |
| 计算耗时/s | 1.52 | 1.56 | 1.57 | 1.63 |

Fig.7 Simulation results of multi-task trajectory planning
| 不确定参数 | 3σ | 不确定参数 | 3σ |
|---|---|---|---|
| h0/km | 3 | σ0/(°) | 0.5 |
| λ0/(°) | 0.5° | ρ/% | 10 |
| ϕ0/(°) | 0.5° | CL/% | 10 |
| v0/(m·s-1) | 100 | CD/% | 10 |
| θ0/(°) | 0.5° |
Table 4 Perturbation settings of initial state and aerodynamic parameters
| 不确定参数 | 3σ | 不确定参数 | 3σ |
|---|---|---|---|
| h0/km | 3 | σ0/(°) | 0.5 |
| λ0/(°) | 0.5° | ρ/% | 10 |
| ϕ0/(°) | 0.5° | CL/% | 10 |
| v0/(m·s-1) | 100 | CD/% | 10 |
| θ0/(°) | 0.5° |
| 终端参数 | Δhf/m | Δvf/(m·s-1) | Δs/m | Δtf/s |
|---|---|---|---|---|
| 平均值 | 0.7946 | 0.1797 | 284.48 | 0.0027 |
| 标准差 | 0.0153 | 0.0084 | 114.51 | 0.0633 |
Table 5 Terminal errors of Monte Carlo simulation
| 终端参数 | Δhf/m | Δvf/(m·s-1) | Δs/m | Δtf/s |
|---|---|---|---|---|
| 平均值 | 0.7946 | 0.1797 | 284.48 | 0.0027 |
| 标准差 | 0.0153 | 0.0084 | 114.51 | 0.0633 |

Fig.8 Monte Carlo simulated results
| 算法性能参数 | 本文方法 | 文献[14]方法 |
|---|---|---|
| Δhf/m | 0.8062 | 3.201 |
| Δvf/(m·s-1) | 0.1721 | 0.2960 |
| Δs/m | 318.71 | 403.90 |
| Δtf/s | 0.1187 | 0.1371 |
| 轨迹迭代次数 | 3 | |
| 计算耗时/s | 1.63 | 1.28 |
Table 6 Comparison of simulated results for different trajectory planning methods
| 算法性能参数 | 本文方法 | 文献[14]方法 |
|---|---|---|
| Δhf/m | 0.8062 | 3.201 |
| Δvf/(m·s-1) | 0.1721 | 0.2960 |
| Δs/m | 318.71 | 403.90 |
| Δtf/s | 0.1187 | 0.1371 |
| 轨迹迭代次数 | 3 | |
| 计算耗时/s | 1.63 | 1.28 |

Fig.9 Simulated results for different trajectory planning methods under the same reentry mission
| [7] |
doi: 10.7527/S1000-6893.2018.22565 |
| [8] |
王浩凝, 唐胜景, 郭杰, 等. 带有动态攻角剖面的时间约束再入制导[J]. 空天防御, 2021, 4(1):71-76.
|
|
|
|
| [9] |
乔浩, 李师尧, 李新国. 多高超声速飞行器静态协同再入制导方法[J]. 宇航学报, 2020, 41(5):541-552.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
刘旭, 李响, 王晓鹏. 高超声速滑翔飞行器解析协同再入制导[J]. 宇航学报, 2023, 44(5):731-742.
|
|
|
|
| [13] |
王培臣, 闫循良, 南汶江, 等. 考虑时间约束的近解析滑翔轨迹快速规划方法[J]. 兵工学报, 2024, 45(7):2294-2305.
doi: 10.12382/bgxb.2023.0343 |
| [1] |
张远龙, 谢愈. 滑翔飞行器弹道规划与制导方法综述[J]. 航空学报, 2020, 41(1):023377.
|
|
|
|
| [2] |
胡砚洋, 何凡, 白成超. 高超声速飞行器末制导段协同避障决策方法[J]. 兵工学报, 2024, 45(9):3147-3160.
doi: 10.12382/bgxb.2023.0831 |
|
doi: 10.12382/bgxb.2023.0831 |
|
| [3] |
王健权, 王韬, 尹中杰, 等. 面向高速目标的临近空间飞机拦截平台制导方法[J]. 宇航学报, 2023, 44(10):1575-1585.
|
|
|
|
| [4] |
|
| [5] |
王涛, 张洪波, 朱如意, 等. 考虑阻力加速度的再入预测-校正制导算法[J]. 宇航学报, 2017, 38(2):143-151.
|
|
|
|
| [6] |
|
| [13] |
doi: 10.12382/bgxb.2023.0343 |
| [14] |
|
| [15] |
姜鹏, 郭栋, 韩亮, 等. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41(增刊1) :723776.
|
|
|
|
| [16] |
方科, 张庆振, 倪昆, 等. 高超声速飞行器时间协同再入制导[J]. 航空学报, 2018, 39(5) :321958.
|
|
|
|
| [17] |
张晚晴, 余文斌, 李静琳, 等. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42(7):1401-1411.
|
|
|
|
| [18] |
|
| [19] |
王肖, 郭杰, 唐胜景, 等. 基于准平衡滑翔的解析再入制导方法[J]. 兵工学报, 2019, 40(1):58-67.
doi: 10.3969/j.issn.1000-1093.2019.01.008 |
| [7] |
王肖, 郭杰, 唐胜景, 等. 基于解析剖面的时间协同再入制导[J]. 航空学报, 2019, 40(3):322565.
doi: 10.7527/S1000-6893.2018.22565 |
| [19] |
doi: 10.3969/j.issn.1000-1093.2019.01.008 |
| [20] |
胡钰, 王华, 任章. 模糊变结构在可重复使用运载器再入轨迹跟踪上的应用[J]. 兵工学报, 2015, 36(10):1899-1906.
doi: 10.3969/j.issn.1000-1093.2015.10.011 |
|
doi: 10.3969/j.issn.1000-1093.2015.10.011 |
|
| [21] |
郭继峰, 傅瑜, 崔乃刚. 三维自主再入制导方法[J]. 控制与决策, 2013, 28(5):688-694.
|
|
|
|
| [22] |
乔浩, 毛瑞, 白凤科, 等. 带时间约束的双参数再入轨迹设计方法[J]. 弹箭与制导学报, 2021, 41(3):57-61.
doi: 10.15892/j.cnki.djzdxb.2021.03.013 |
|
|
|
| [23] |
|
| [24] |
|
| [1] | WANG Peichen, YAN Xunliang, NAN Wenjiang, LI Xinguo. A Rapid and Near Analytic Planning Method for Gliding Trajectory under Time Constraints [J]. Acta Armamentarii, 2024, 45(7): 2294-2305. |
| [2] | ZHANG Chun-yan, SONG Jian-mei, HOU Bo, ZHANG Min-qiang. Cooperative Guidance Law with Impact Angle and Impact Time Constraints for Networked Missiles [J]. Acta Armamentarii, 2016, 37(3): 431-438. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||