
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (7): 2318-2328.doi: 10.12382/bgxb.2023.0588
Previous Articles Next Articles
WANG Yong’an1, LI Dongguang1,2,*( ), WU Hao1, LIU Yang1
), WU Hao1, LIU Yang1
Received:2023-06-19
Online:2023-10-31
Contact:
LI Dongguang
CLC Number:
WANG Yong’an, LI Dongguang, WU Hao, LIU Yang. An Adaptive Filtering-disturbance Observer-based State Estimation Algorithm for Large Ships[J]. Acta Armamentarii, 2024, 45(7): 2318-2328.
Add to citation manager EndNote|Ris|BibTeX
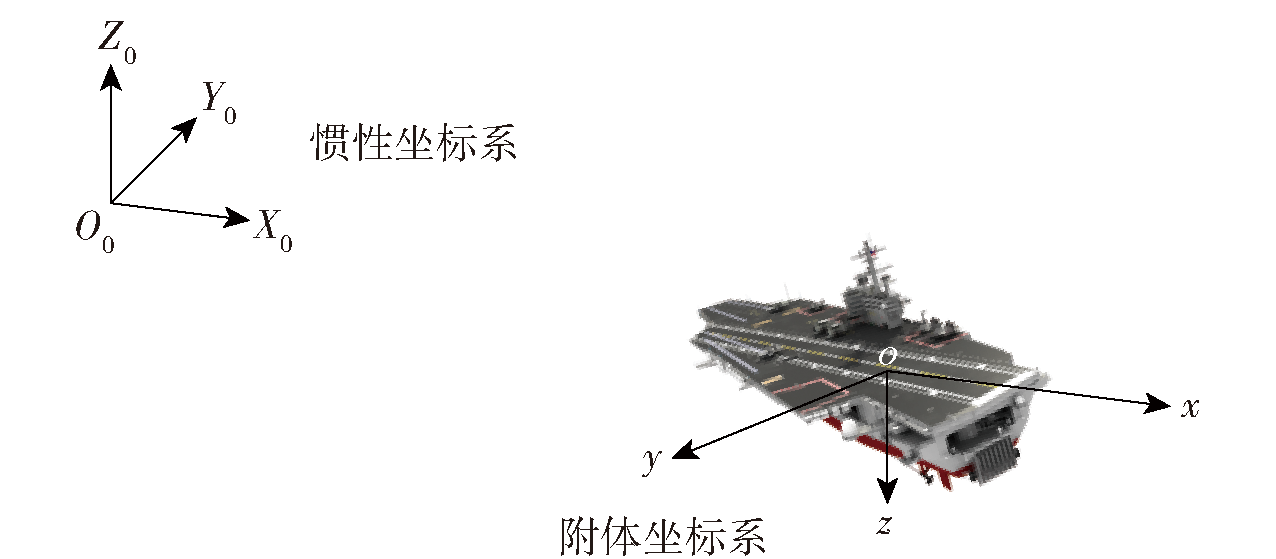
Fig.1 Reference coordinate system for large ships
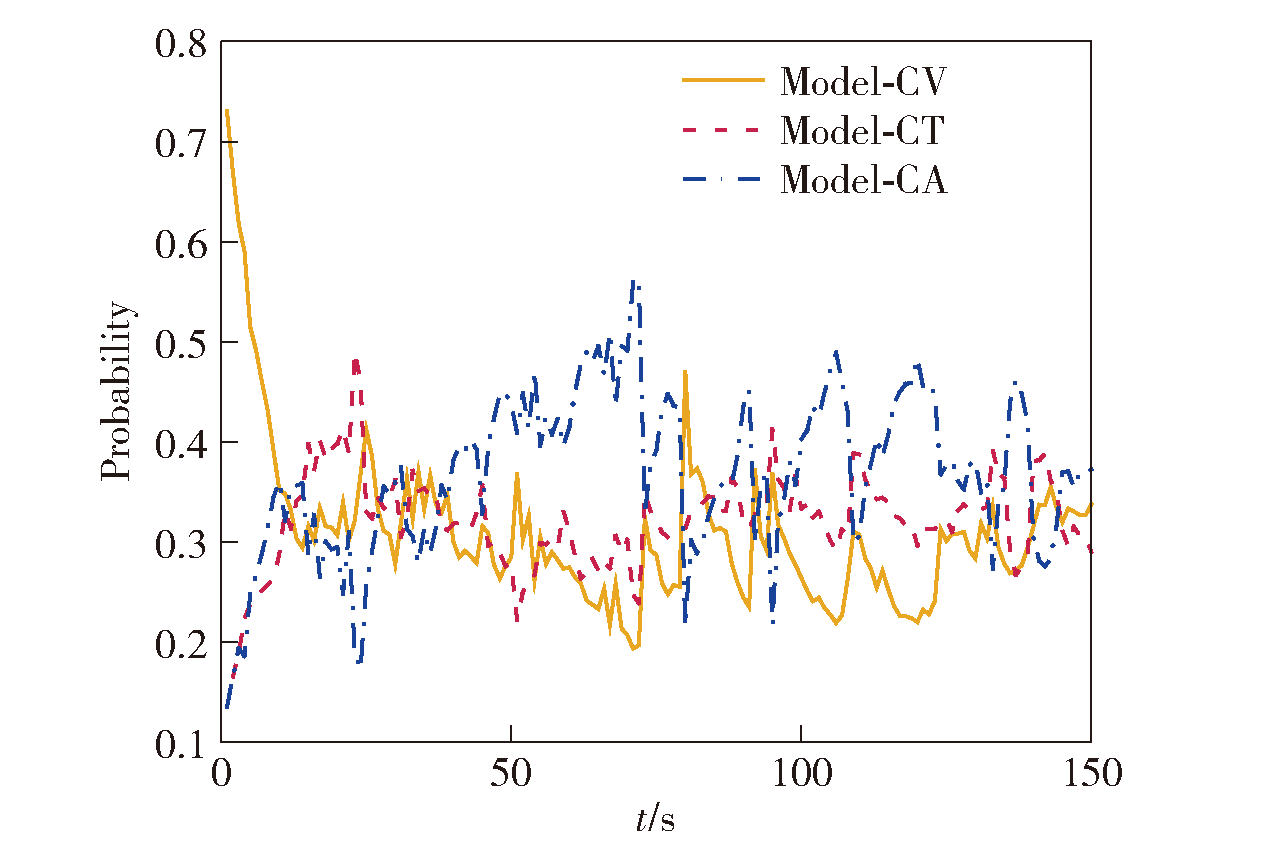
Fig.2 Single simulation model probability
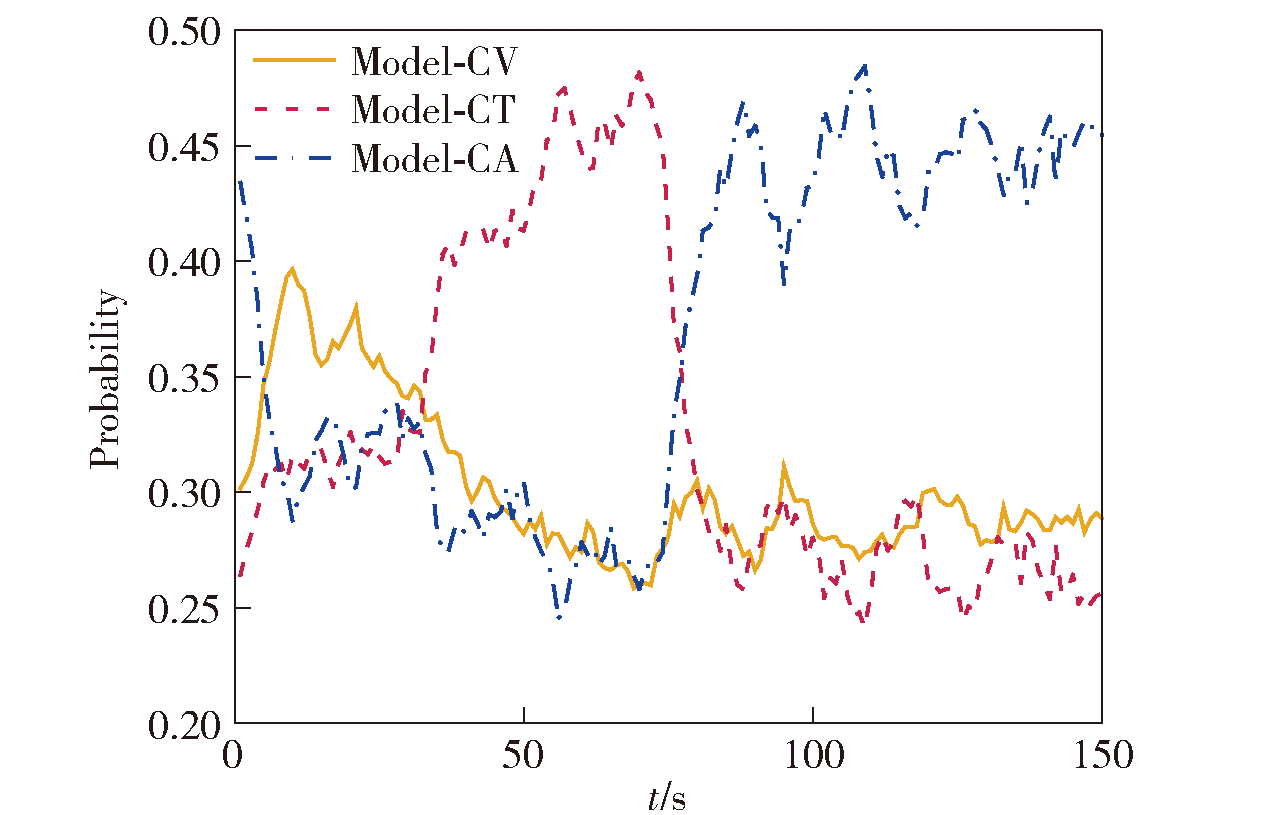
Fig.3 Average of model probabilities after 50 Monte Carlo simulations
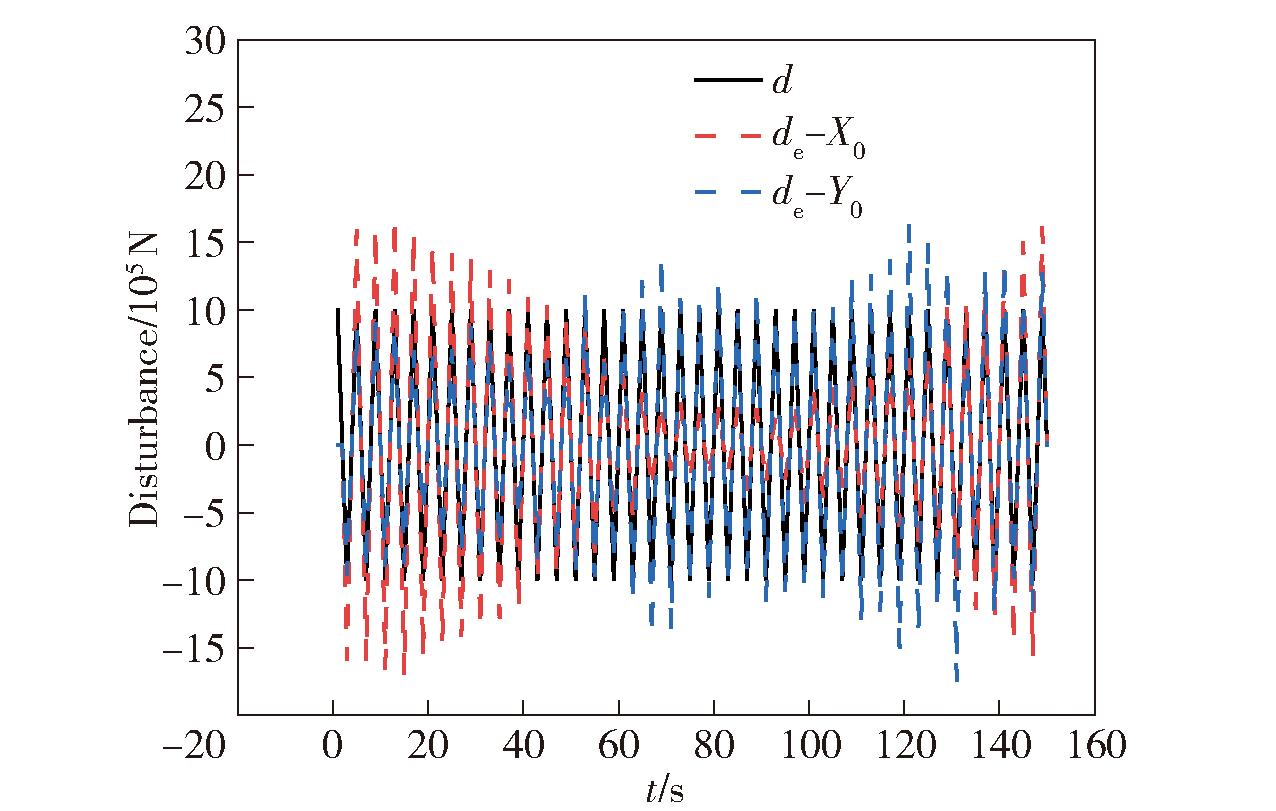
Fig.4 Estimation of disturbance values
| 方向 | 最大估计误差/N | 平均估计误差/N |
|---|---|---|
| X0轴 | 8.25×105 | 6.47×104 |
| Y0轴 | 5.20×105 | 8.80×103 |
Table 1 Estimation error of nonlinear disturbance term
| 方向 | 最大估计误差/N | 平均估计误差/N |
|---|---|---|
| X0轴 | 8.25×105 | 6.47×104 |
| Y0轴 | 5.20×105 | 8.80×103 |
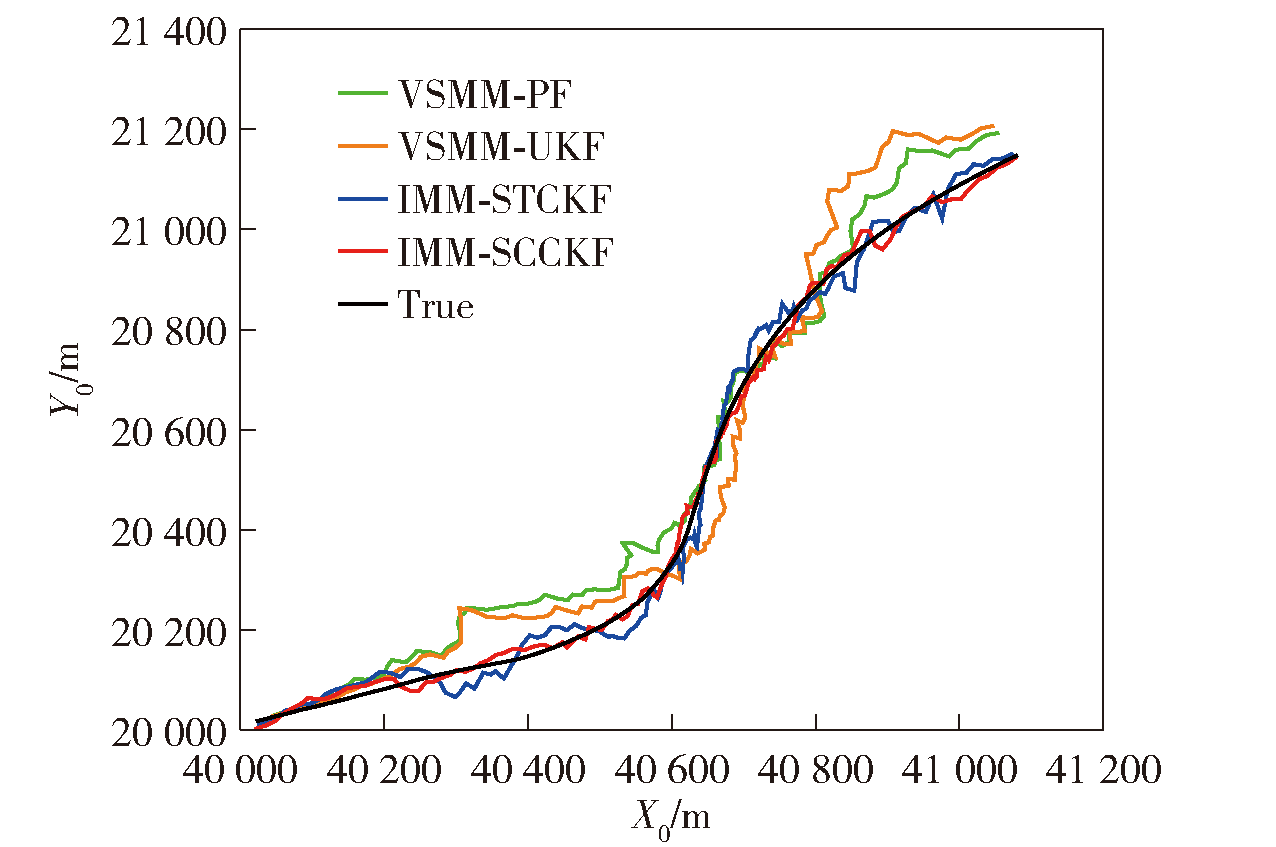
Fig.5 Target motion trajectory and the trajectory filtered by each algorithm
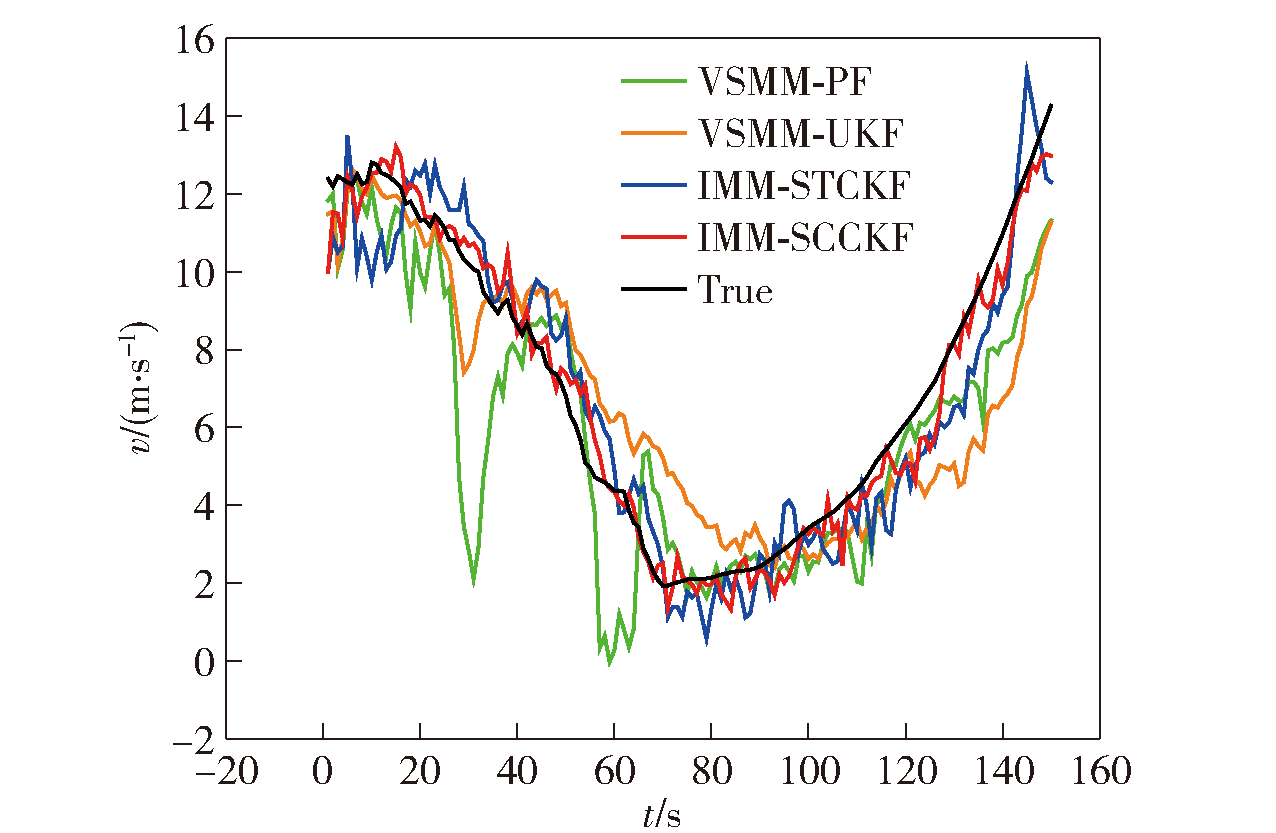
Fig.6 Target velocity estimation in X0-axis direction
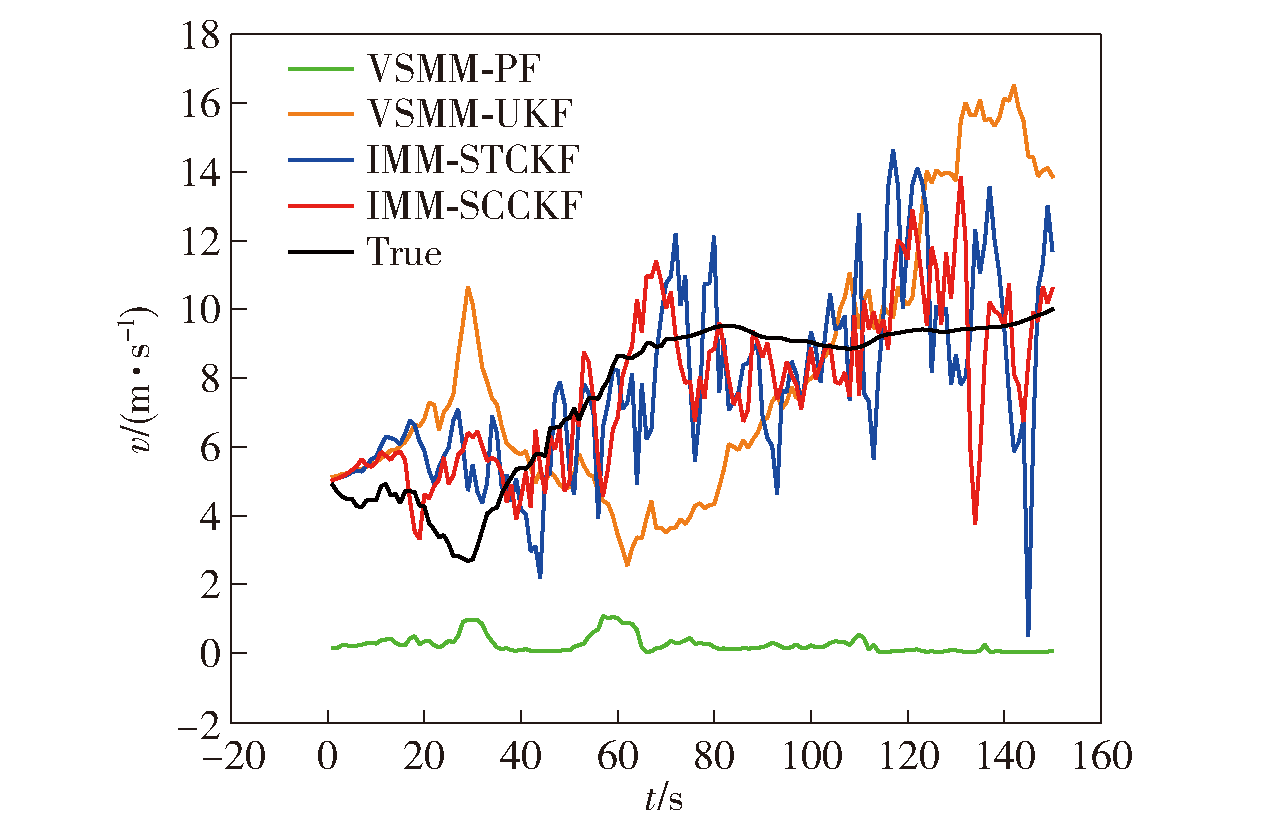
Fig.7 Target velocity estimation in Y0-axis direction
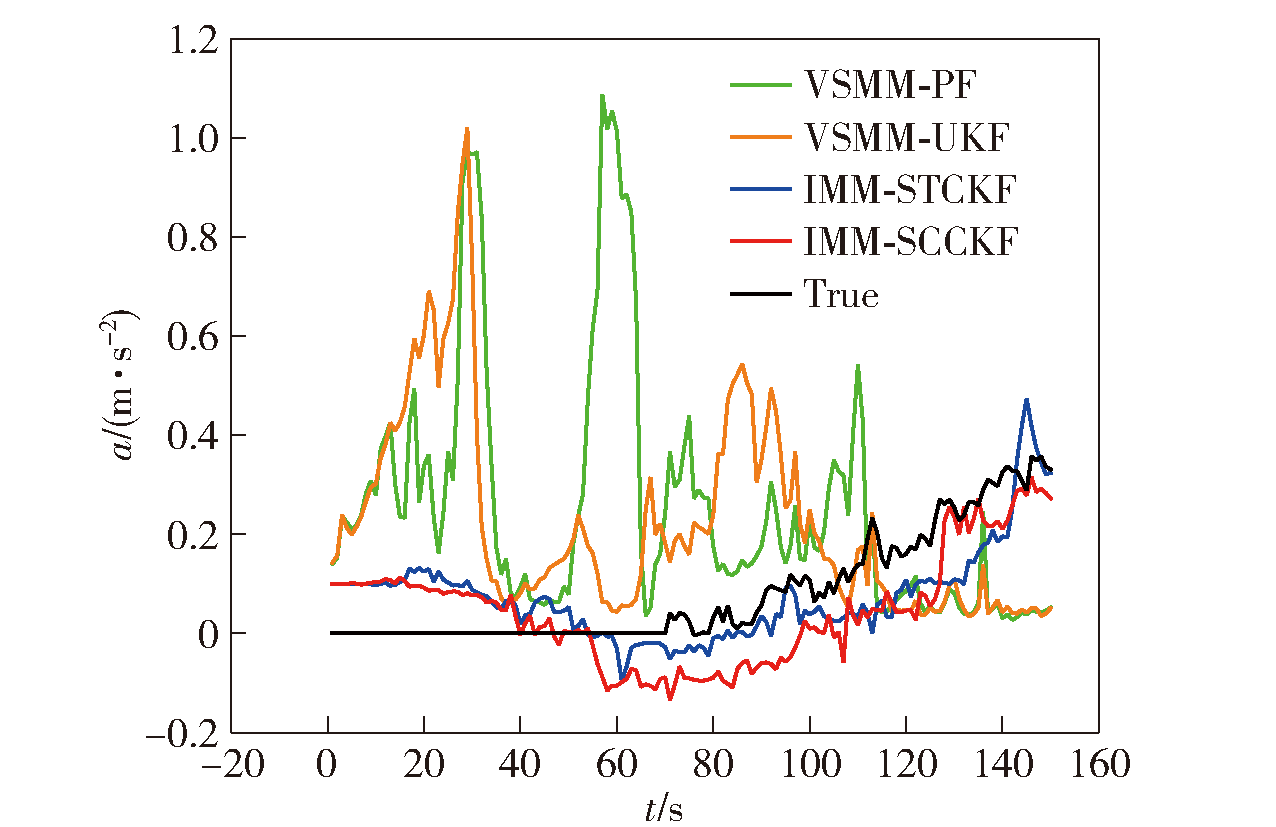
Fig.8 Target acceleration estimation in X0-axis direction
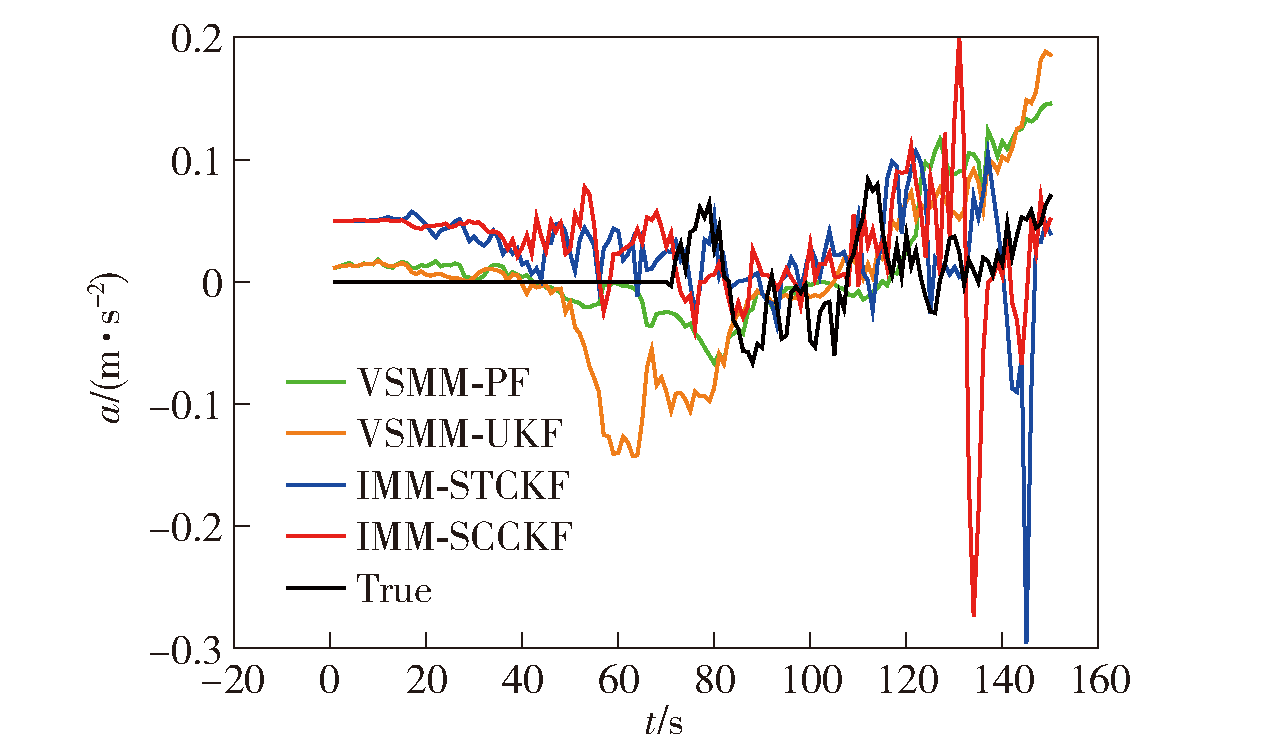
Fig.9 Target acceleration estimation in Y0-axis direction
| 算法 | 最大误差值/m | 平均误差值/m |
|---|---|---|
| VSMM-PF | 121.67 | 40.29 |
| VSMM-UKF | 144.55 | 47.52 |
| IMM-STCKF | 108.26 | 25.55 |
| IMM-SCCKF | 41.17 | 12.08 |
Table 2 Estimation of target position by algorithms
| 算法 | 最大误差值/m | 平均误差值/m |
|---|---|---|
| VSMM-PF | 121.67 | 40.29 |
| VSMM-UKF | 144.55 | 47.52 |
| IMM-STCKF | 108.26 | 25.55 |
| IMM-SCCKF | 41.17 | 12.08 |
| 算法 | X0轴加速度 均方根误差均值/ (m·s-2) | Y0轴加速度 均方根误差均值/ (m·s-2) |
|---|---|---|
| VSMM-PF | 4.40 | 0.62 |
| VSMM-UKF | 3.72 | 0.80 |
| IMM-STCKF | 1.04 | 0.68 |
| IMM-SCCKF | 1.17 | 0.70 |
Table 3 Root mean square error of acceleration for each algorithm
| 算法 | X0轴加速度 均方根误差均值/ (m·s-2) | Y0轴加速度 均方根误差均值/ (m·s-2) |
|---|---|---|
| VSMM-PF | 4.40 | 0.62 |
| VSMM-UKF | 3.72 | 0.80 |
| IMM-STCKF | 1.04 | 0.68 |
| IMM-SCCKF | 1.17 | 0.70 |
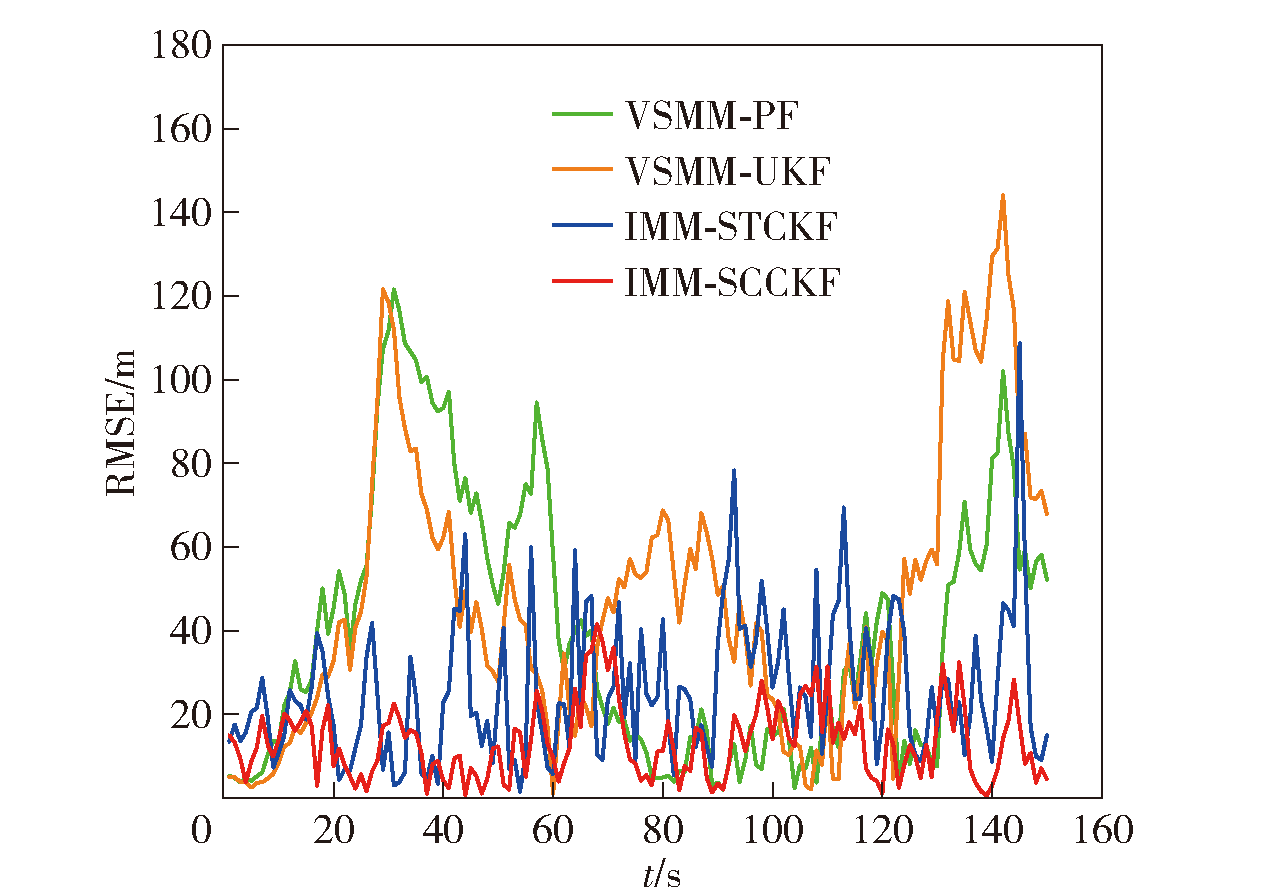
Fig.10 Root mean square error of position
| 算法 | 位置均方根 误差均值/m | 速度均方根 误差均值/(m·s-1) |
|---|---|---|
| VSMM-PF | 40.29 | 2.85 |
| VSMM-UKF | 47.76 | 3.62 |
| IMM-STCKF | 25.69 | 2.24 |
| IMM-SCCKF | 13.35 | 1.52 |
Table 4 Root mean square error of each algorithm
| 算法 | 位置均方根 误差均值/m | 速度均方根 误差均值/(m·s-1) |
|---|---|---|
| VSMM-PF | 40.29 | 2.85 |
| VSMM-UKF | 47.76 | 3.62 |
| IMM-STCKF | 25.69 | 2.24 |
| IMM-SCCKF | 13.35 | 1.52 |
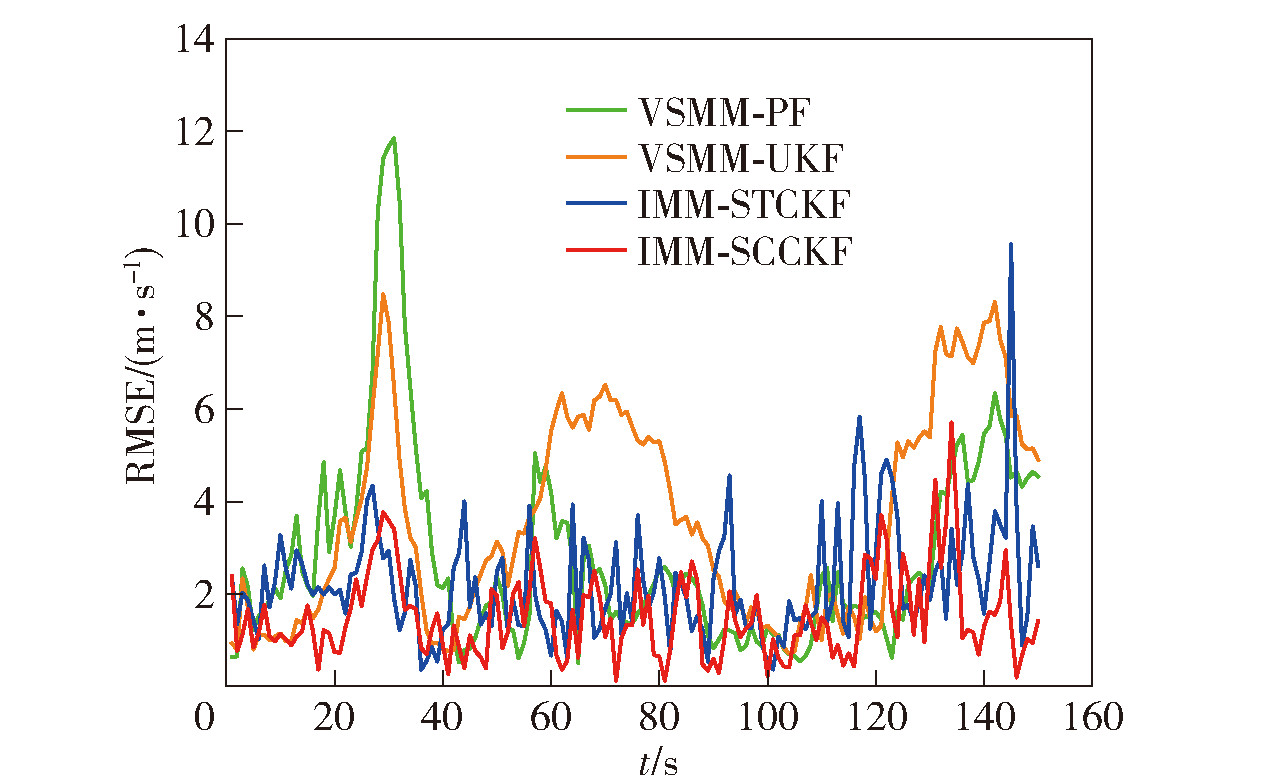
Fig.11 Root mean square error of velocity
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
doi: 10.23919/JSEE.2022.000115 |
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
王宁, 李银伢, 戚国庆, 等. 不完全量测下基于信息一致性的分布式容积卡尔曼滤波算法[J]. 兵工学报, 2021, 42(11):2396-2408.
doi: 10.3969/j.issn.1000-1093.2021.11.013 |
|
|
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
doi: 10.1016/j.isatra.2015.07.004 pmid: 26210638 |
| [19] |
王新屏. 舵鳍联合系统的简捷非线性鲁棒控制[D]. 大连: 大连海事大学, 2009.
|
|
|
|
| [20] |
张国庆, 张显库. 船舶运动数学模型与MATLAB仿真[M]. 徐州: 中国矿业大学出版社, 2020.
|
|
|
|
| [21] |
贾欣乐, 杨盐生. 船舶运动数学模型——机理建模与辨识建模[M]. 大连: 大连海事大学出版社, 1999.
|
|
|
|
| [22] |
周昭明, 盛子寅, 冯悟时. 多用途货船的操纵性预报计算[J]. 船舶工程, 1983, 36(6):21-29, 36.
|
|
|
|
| [23] |
|
| [24] |
刘金琨, 刘志杰. 基于LMI的控制系统设计、分析及MATLAB仿真[M]. 北京: 清华大学出版社, 2020: 55-60.
|
|
|
|
| [25] |
许跃千. 基于非线性滤波的水下目标跟踪技术研究[D]. 哈尔滨: 哈尔滨工程大学, 2019.
|
|
|
| [1] | CHEN Dong, QIAN Linfang, CHEN Zhiqun, CHEN Longmiao, ZOU Quan, CHEN Junhua. An Improved Quasi-continuous Algorithm for Rotational Shell Magazine Position Control [J]. Acta Armamentarii, 2024, 45(5): 1436-1448. |
| [2] | SUN Qiang, JIANG Runxiang, YU Peng, CHENG Jinfang. Integrative Stealth Method of Corrosion-related Static and Shaft-rate Electric Fields [J]. Acta Armamentarii, 2020, 41(4): 730-736. |
| [3] | YAN Bing, SUN Baoquan, ZHANG Jiawei. Ship Static Electric Field Tracking Based on Filter Bank [J]. Acta Armamentarii, 2019, 40(7): 1468-1475. |
| [4] | MENG Lu-wen, CHENG Guang-li, CHEN Ya-nan, ZHANG Ming-min. On the Porpogation Mechanism of Ship Seismic Wave and Its Application in Mine Fuze [J]. Acta Armamentarii, 2017, 38(2): 319-325. |
| [5] | XIANG Jie, MAO Yong-xing, GUO Cai-fa. A New Ship Speed Correction Method for Measured Speed Data from Radar onboard Space TTC Ship [J]. Acta Armamentarii, 2017, 38(11): 2268-2273. |
| [6] | CHEN Chen, MA Guang-fu, SUN Yan-chao, LI Chuan-jiang. Recursive Sliding Mode Control for Hypersonic Vehicle Based on Nonlinear Disturbance Observer [J]. Acta Armamentarii, 2016, 37(5): 840-850. |
| [7] | LIU Jun-hui, SHAN Jia-yuan, ZHAO Xin. Disturbance Torque Compensation of Gyro-stabilized Seeker Based on Disturbance Observer [J]. Acta Armamentarii, 2014, 35(6): 842-849. |
| [8] | XU Jiao, WANG Jiang, SONG Tao, HU Kuan-rong. A Disturbance Observer-based Inhibition Method for Disturbance Rejection Rate of Seeker [J]. Acta Armamentarii, 2014, 35(11): 1790-1798. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||