
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (1): 276-287.doi: 10.12382/bgxb.2022.0941
Previous Articles Next Articles
ZHANG Tianyi, ZHENG Ying*( ), QIU Xinguo, JI Xingjian, JIN Xiaohang
), QIU Xinguo, JI Xingjian, JIN Xiaohang
Received:2022-10-17
Online:2024-01-30
Contact:
ZHENG Ying
CLC Number:
ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model[J]. Acta Armamentarii, 2024, 45(1): 276-287.
Add to citation manager EndNote|Ris|BibTeX
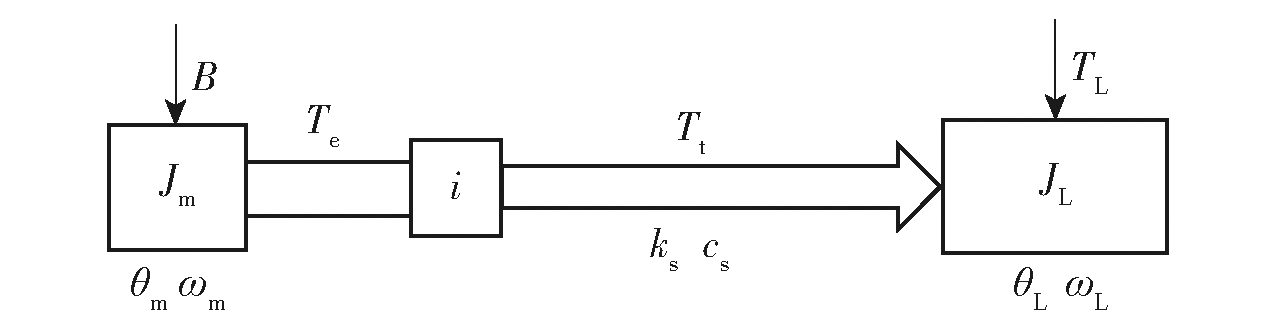
Fig.1 Two-inertia model of joint servomechanism
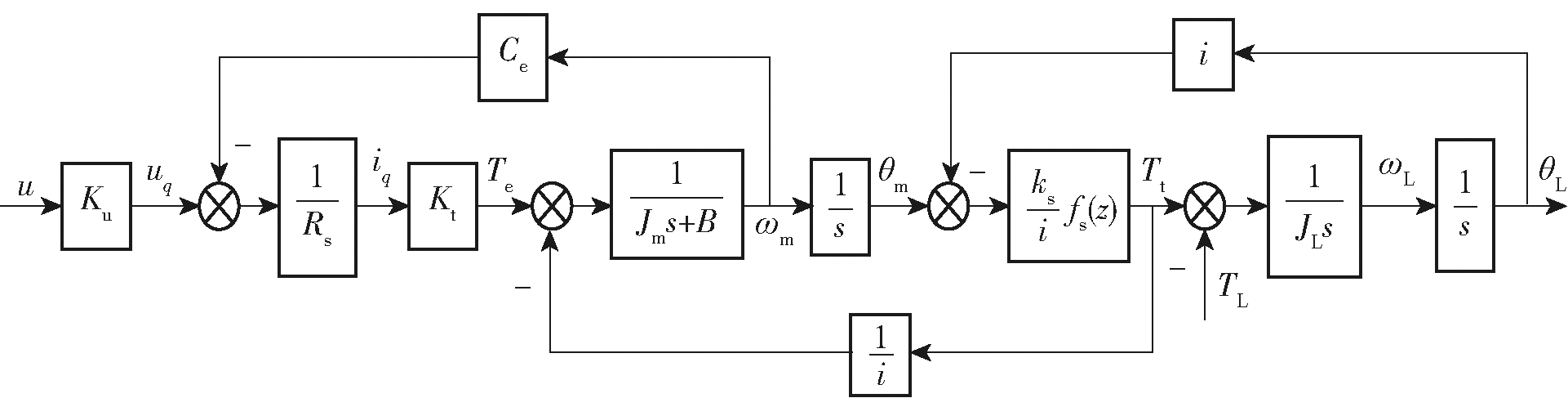
Fig.2 Dynamic model of joint servomechanism
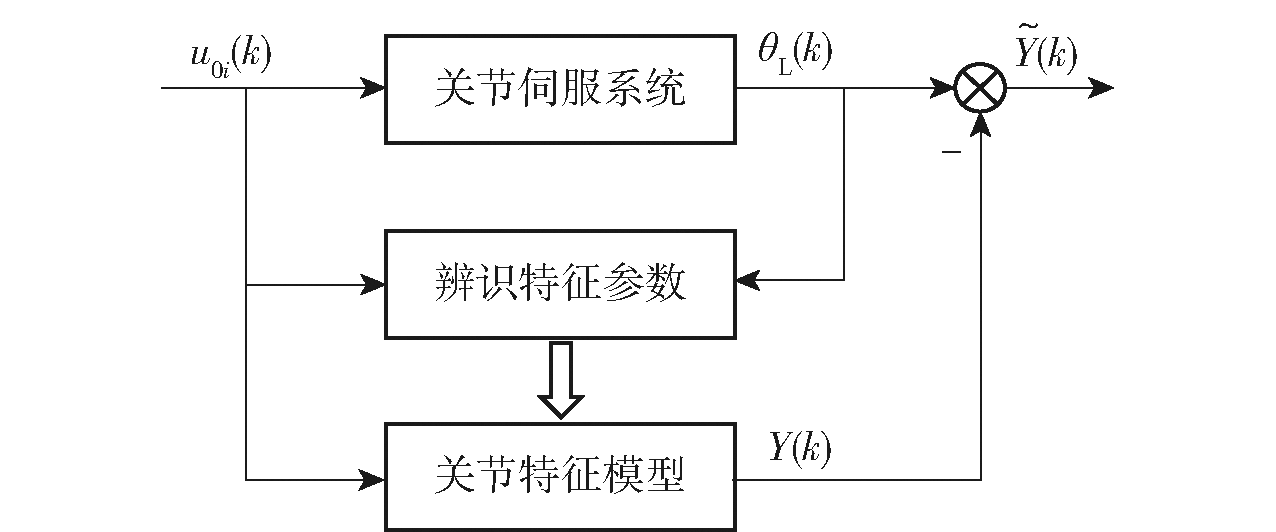
Fig.3 Error verification of characteristic model
| 参数 | 数值 |
|---|---|
| 反电动势Ce/(V·rad·s-1) | 0.0764 |
| 转矩常数Kt/(N·m·A-1) | 0.112 |
| 转动惯量Jm/(kg·m2) | 0.175×10-4 |
| 定子电阻Rs/Ω | 0.15 |
| 黏滞摩擦系数B/(N·m·(rad·s-1)-1) | 0.3 |
| 减速比i | 100:1 |
| PWM功放系数Ku | 8.32 |
| 额定负载惯量JL/(kg·m2) | 0.025 |
| 联轴器刚度系数ks/(N·m·rad-1) | 3000 |
| 齿隙2θ/rad | 0.00175 |
Table 1 Parameters of servomechanism
| 参数 | 数值 |
|---|---|
| 反电动势Ce/(V·rad·s-1) | 0.0764 |
| 转矩常数Kt/(N·m·A-1) | 0.112 |
| 转动惯量Jm/(kg·m2) | 0.175×10-4 |
| 定子电阻Rs/Ω | 0.15 |
| 黏滞摩擦系数B/(N·m·(rad·s-1)-1) | 0.3 |
| 减速比i | 100:1 |
| PWM功放系数Ku | 8.32 |
| 额定负载惯量JL/(kg·m2) | 0.025 |
| 联轴器刚度系数ks/(N·m·rad-1) | 3000 |
| 齿隙2θ/rad | 0.00175 |
| 信号 | $\hat{f}_{1}$ | $\hat{f}_{2}$ | $\hat{g}_{0}$ | $\tilde{Y} /\left(^{\circ}\right) $ |
|---|---|---|---|---|
| 1.3461 | -0.3465 | 3.0659×10-5 | 0.026 | |
| 2 | 1.3472 | -0.3469 | 6.6071×10-4 | 0.021 |
| 3 | 1.3475 | -0.3481 | 5.8614×10-4 | 0.035 |
Table 2 Identification results of characteristic parameters
| 信号 | $\hat{f}_{1}$ | $\hat{f}_{2}$ | $\hat{g}_{0}$ | $\tilde{Y} /\left(^{\circ}\right) $ |
|---|---|---|---|---|
| 1.3461 | -0.3465 | 3.0659×10-5 | 0.026 | |
| 2 | 1.3472 | -0.3469 | 6.6071×10-4 | 0.021 |
| 3 | 1.3475 | -0.3481 | 5.8614×10-4 | 0.035 |
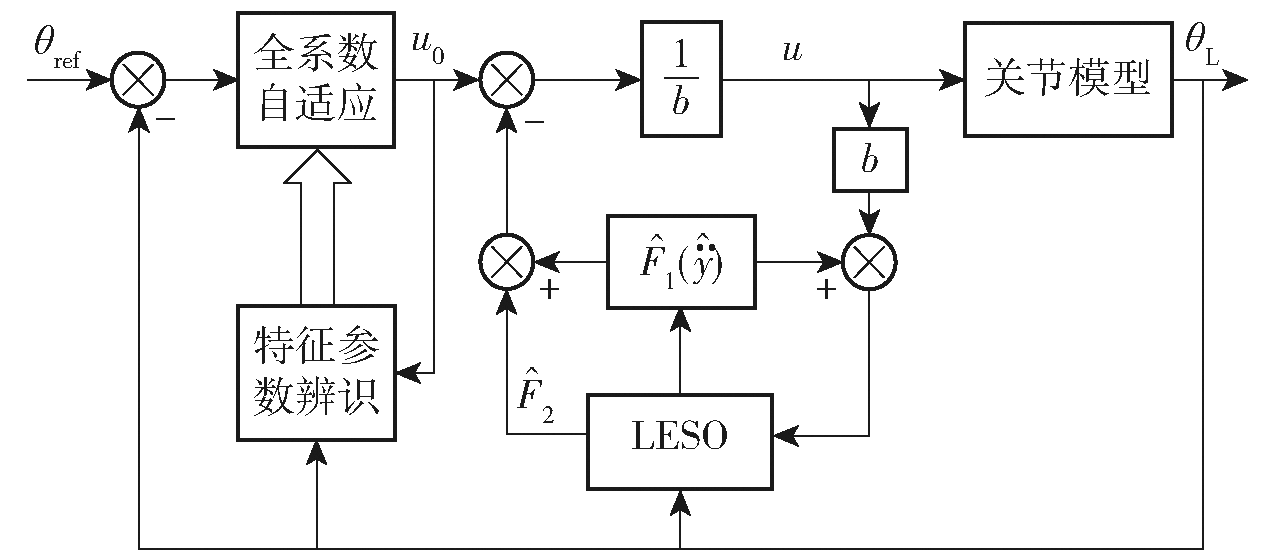
Fig.4 Control structure of joint servomechanism
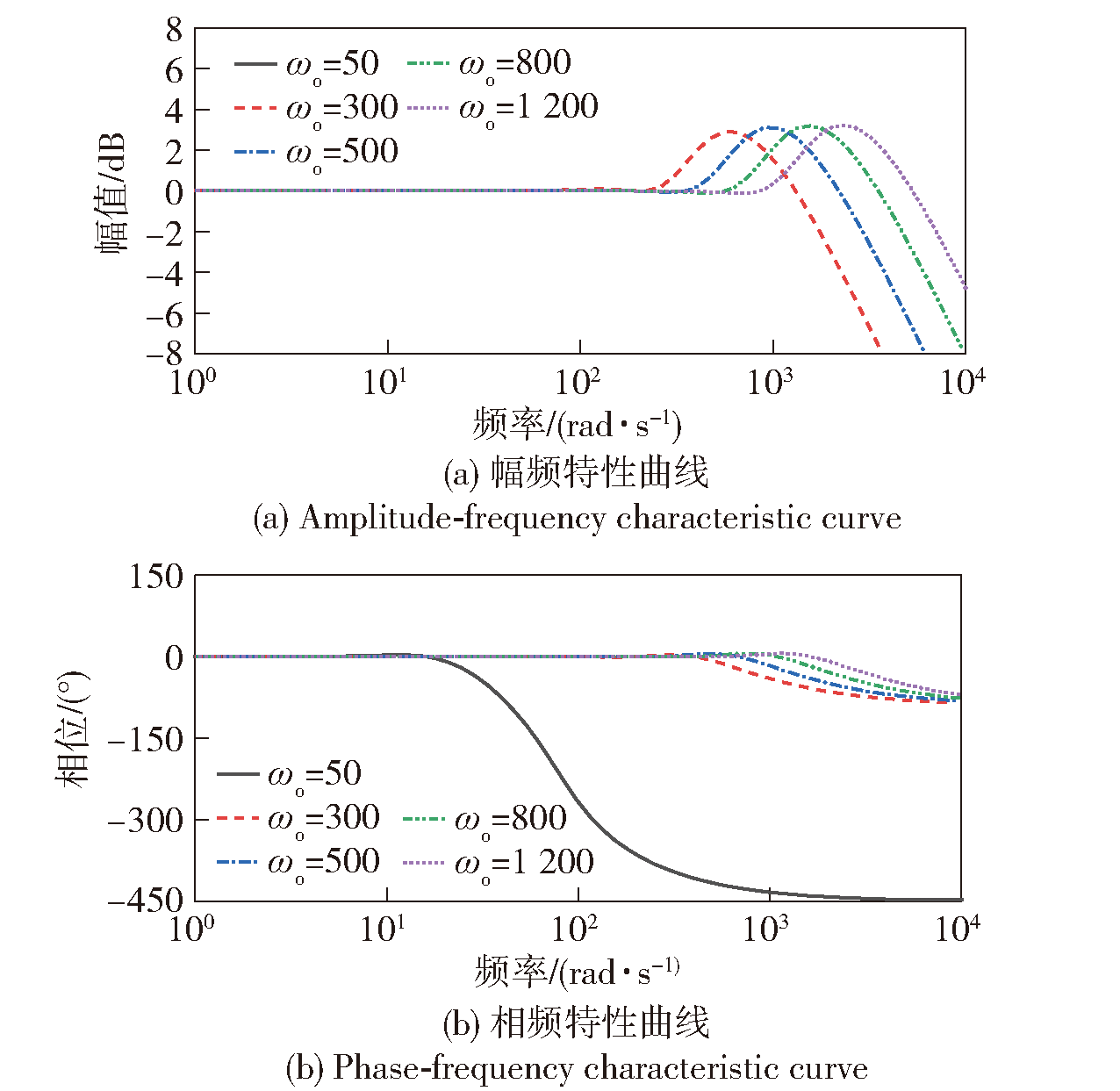
Fig.5 Frequency domain characteristic curve of position feedback quantity
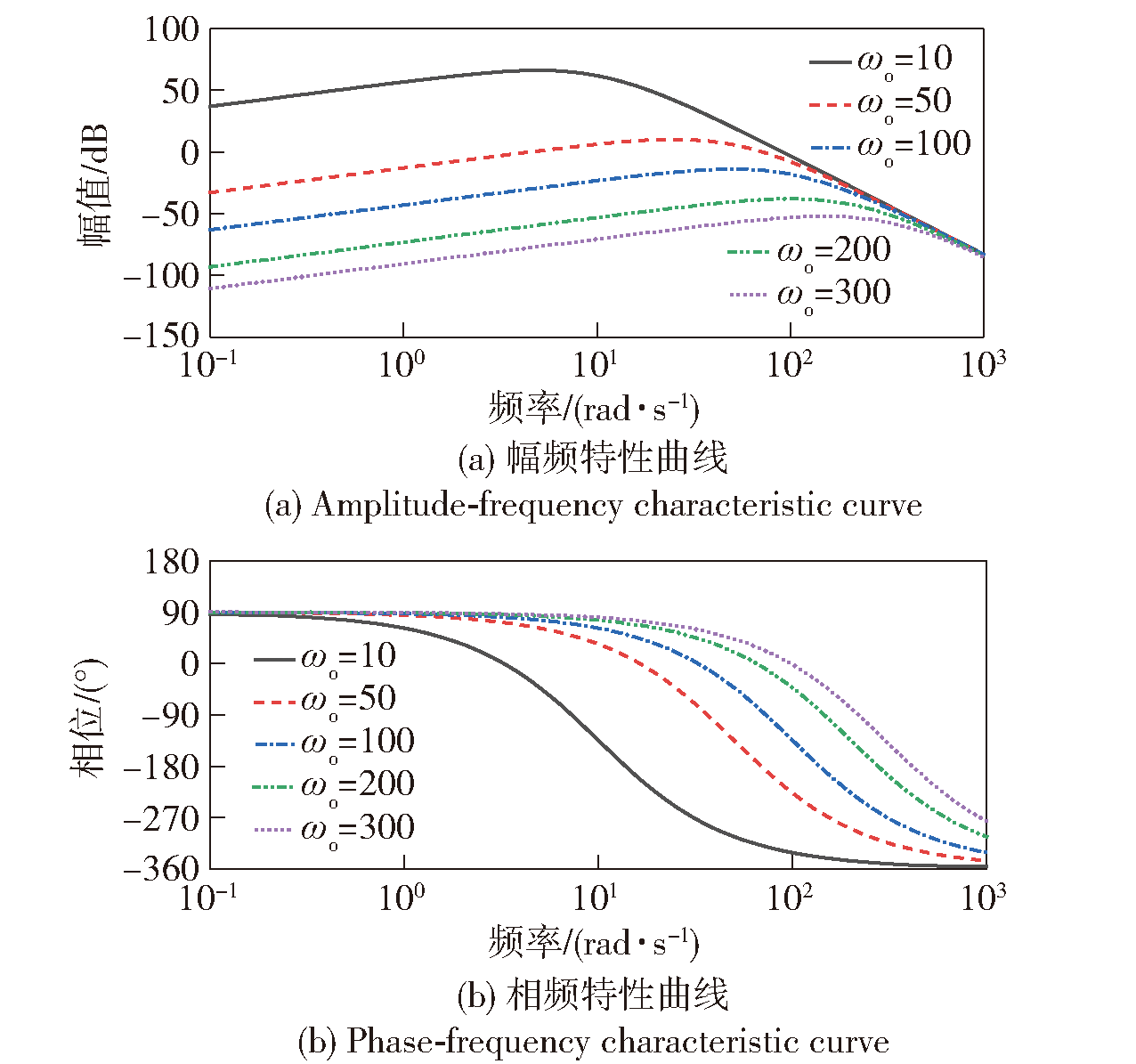
Fig.6 Frequency domain characteristic curve of controller output

Fig.7 Experimental platform
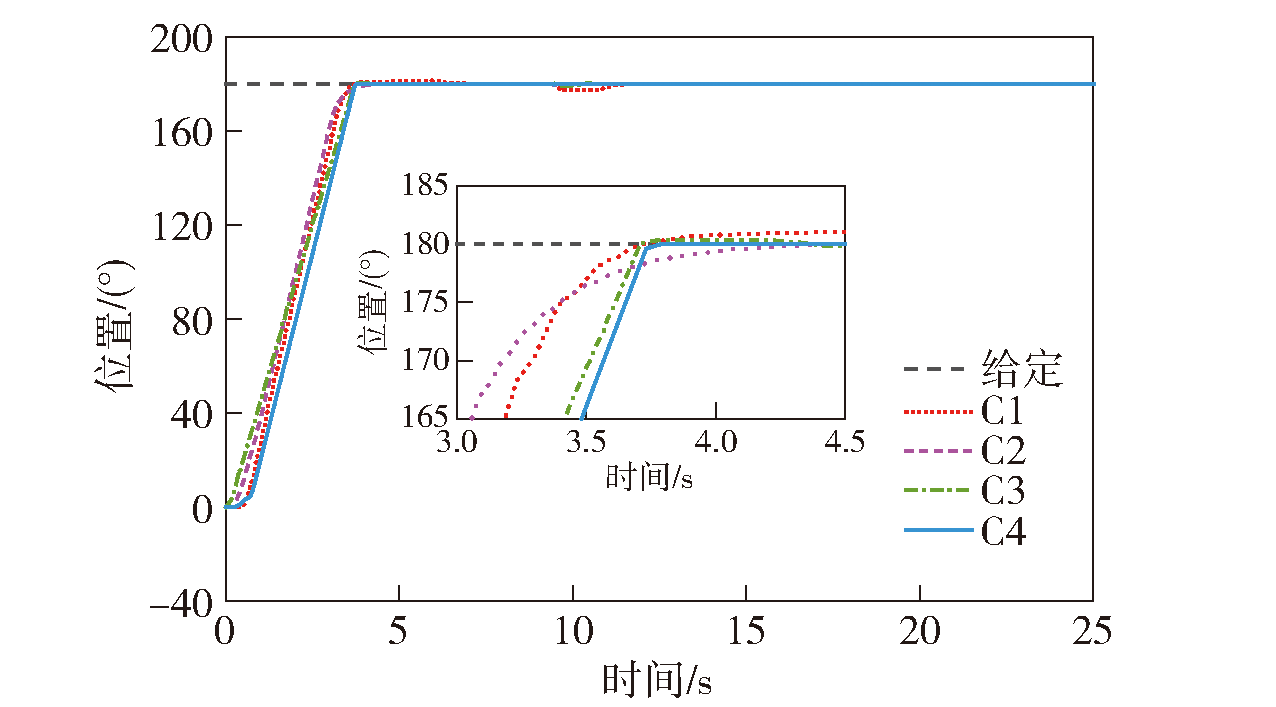
Fig.8 Step response curve
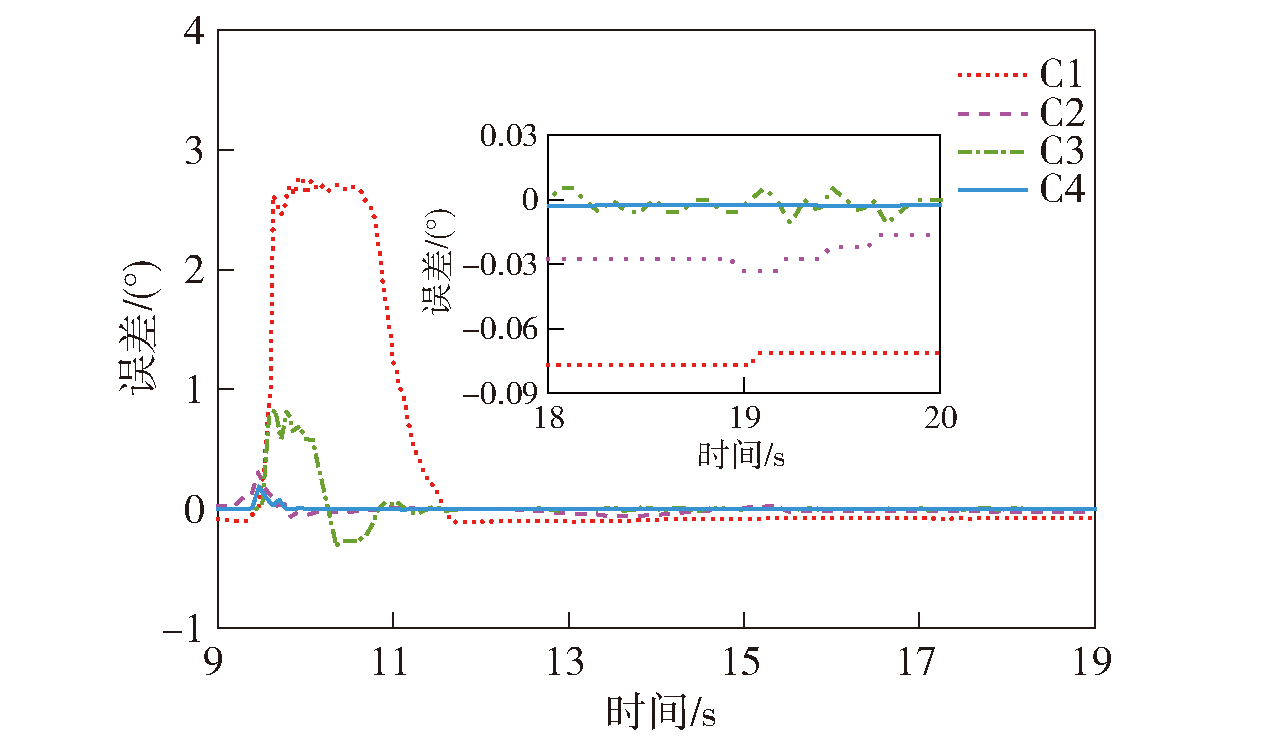
Fig.9 Step tracking error
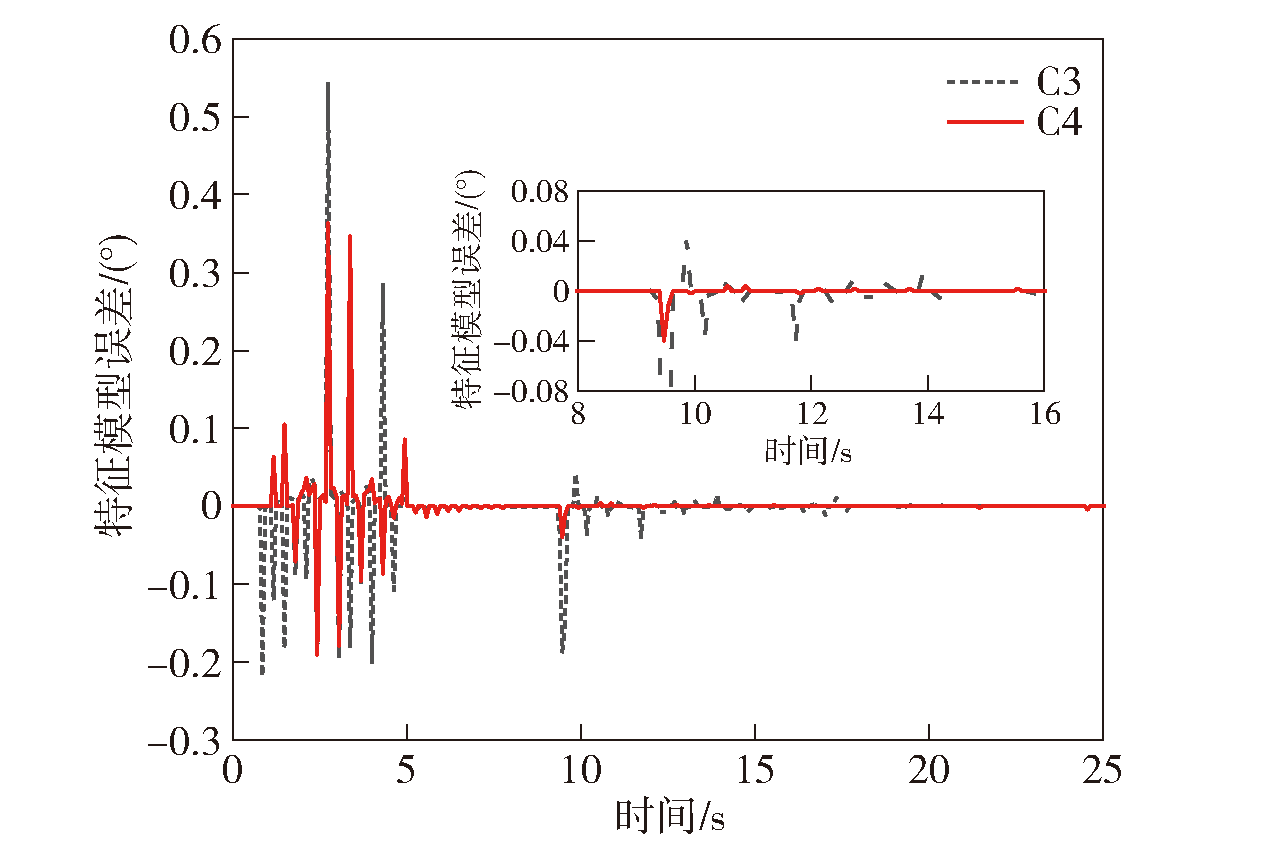
Fig.10 Characteristic model error
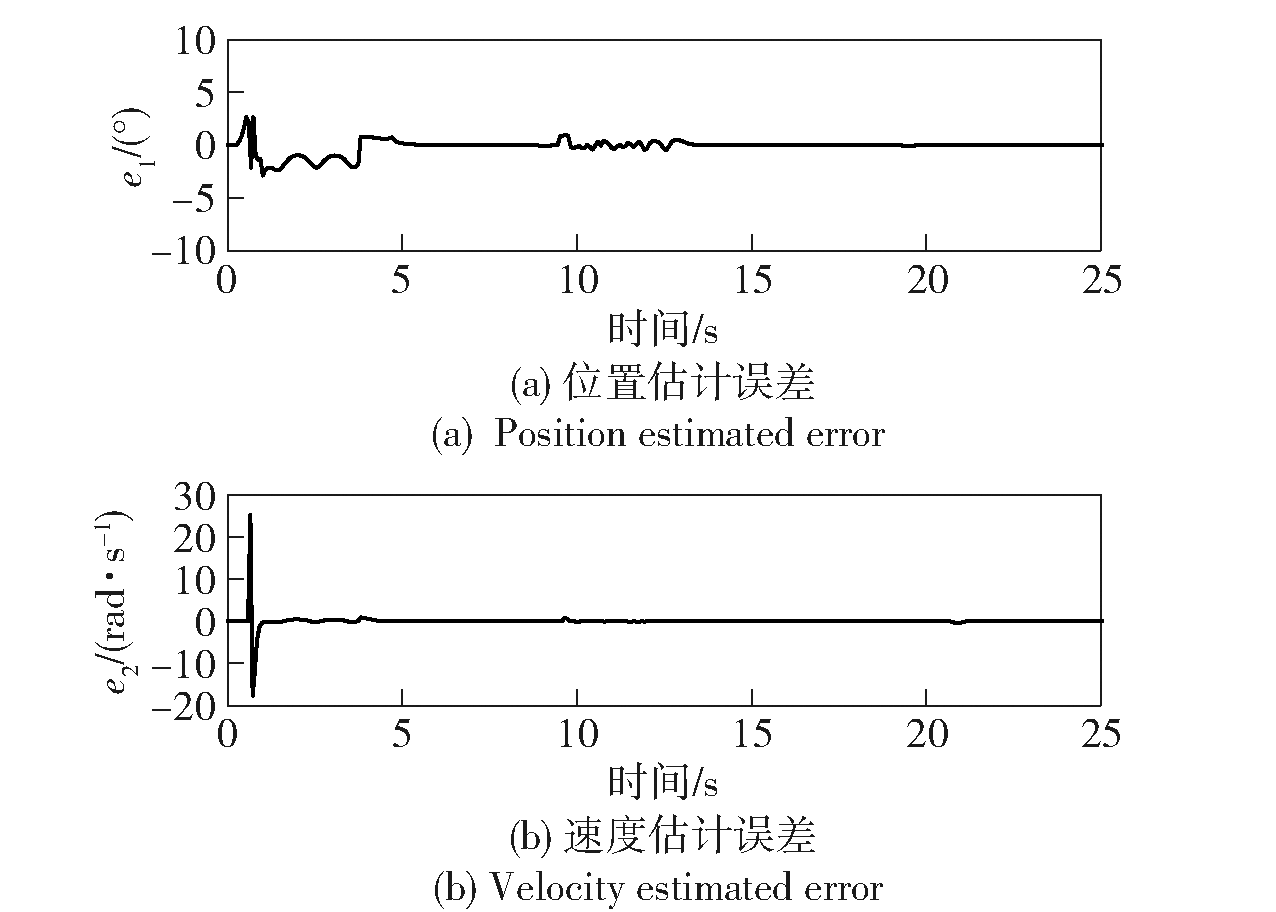
Fig.11 Position and velocity estimated errors of C4
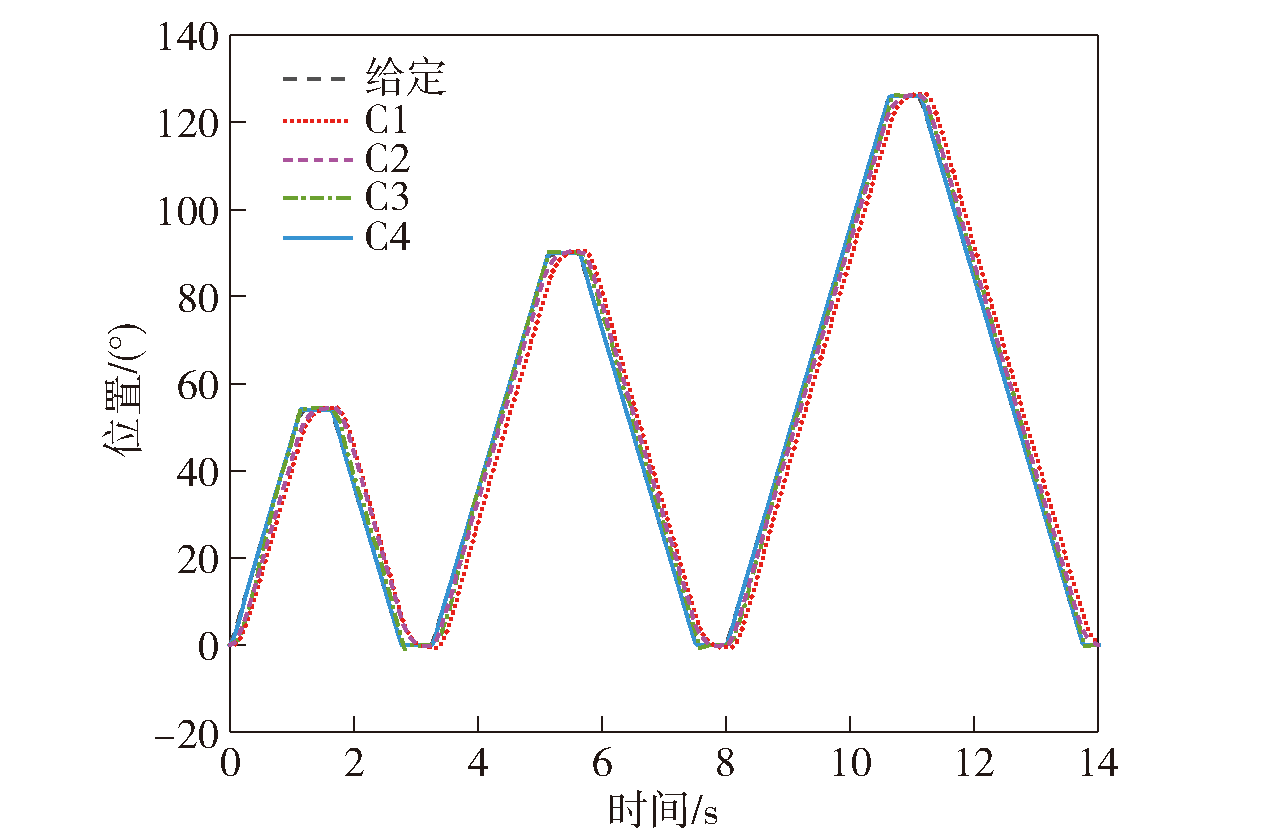
Fig.12 Continuous step response curves
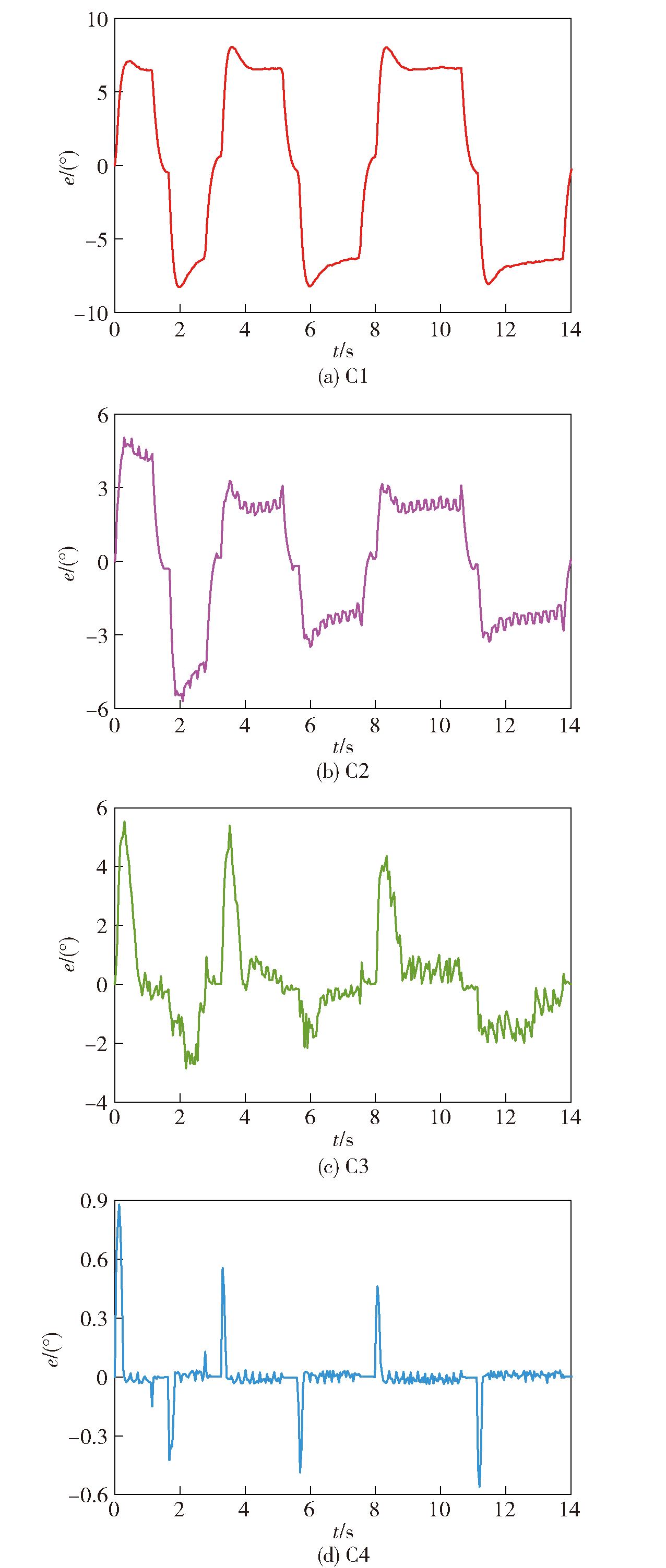
Fig.13 Continuous step tracking error
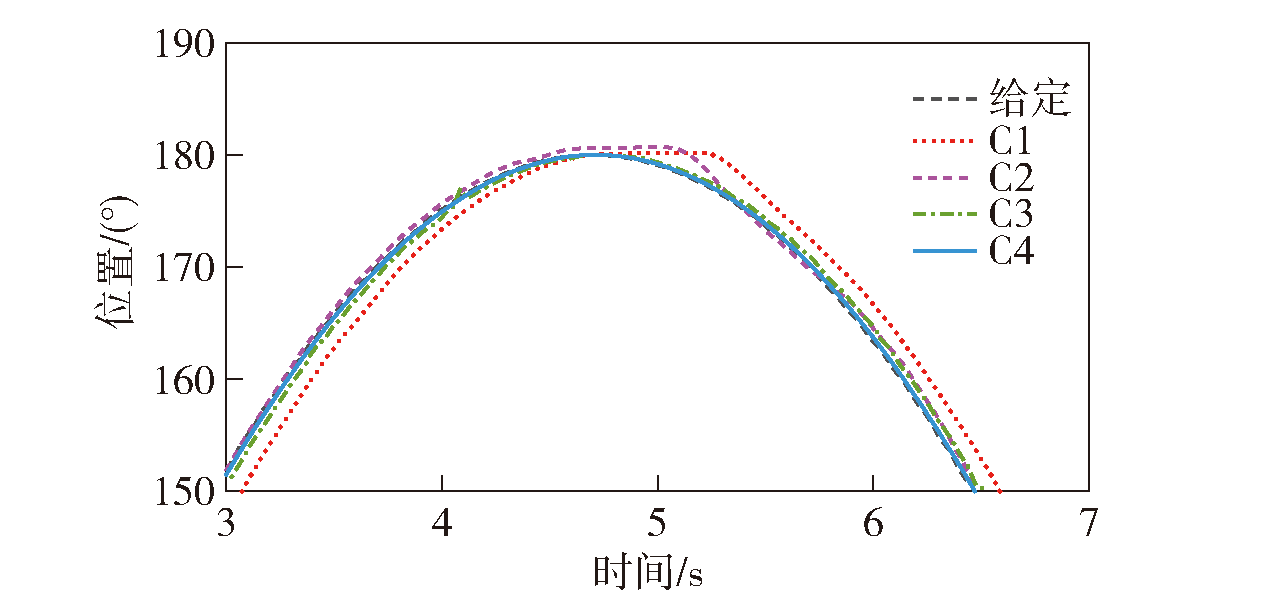
Fig.14 Sinusoidal tracking curve
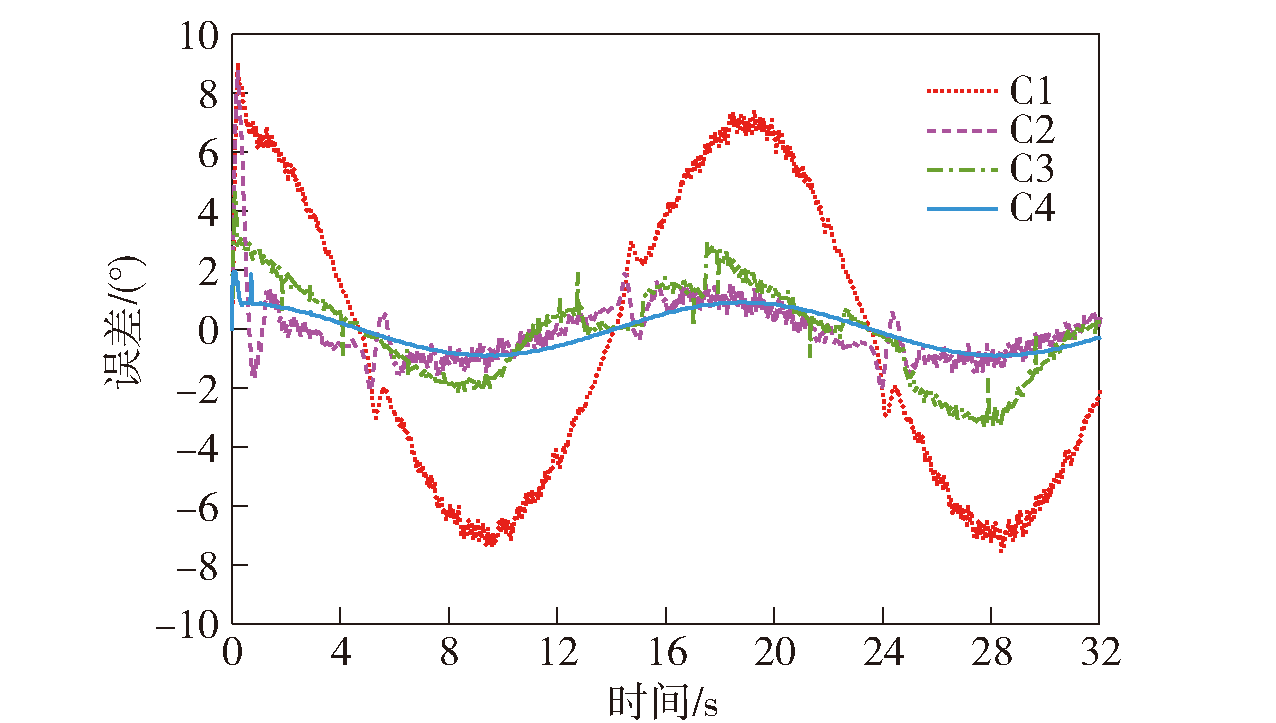
Fig.15 Sinusoidal tracking error
| 控制器 | 指标 | ||
|---|---|---|---|
| Me | μ | σ | |
| C1 | 9.025 | 5.155 | 2.394 |
| C2 | 8.736 | 0.821 | 0.842 |
| C3 | 4.699 | 1.285 | 0.939 |
| C4 | 1.952 | 0.594 | 0.295 |
Table 3 Performance indicators(°)
| 控制器 | 指标 | ||
|---|---|---|---|
| Me | μ | σ | |
| C1 | 9.025 | 5.155 | 2.394 |
| C2 | 8.736 | 0.821 | 0.842 |
| C3 | 4.699 | 1.285 | 0.939 |
| C4 | 1.952 | 0.594 | 0.295 |
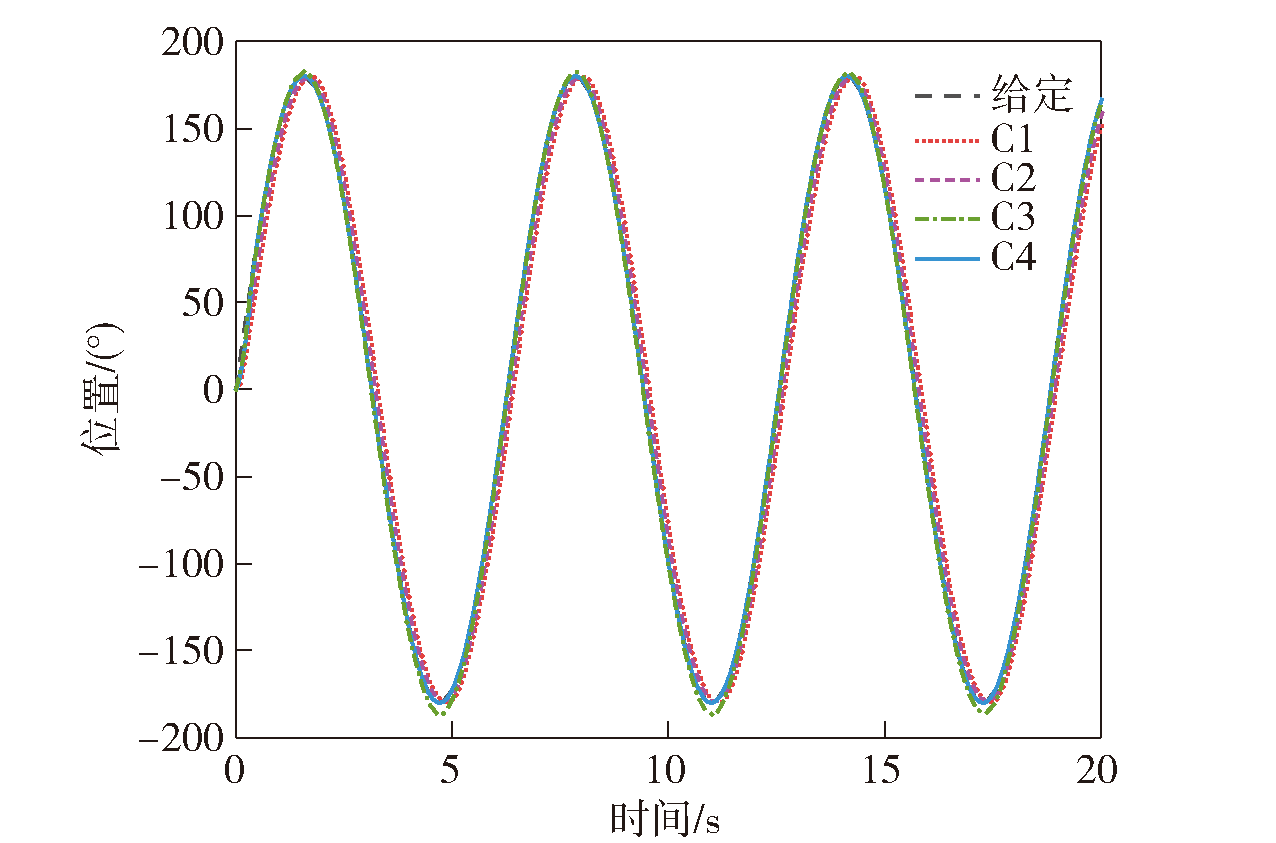
Fig.16 Sinusoidal tracking curve
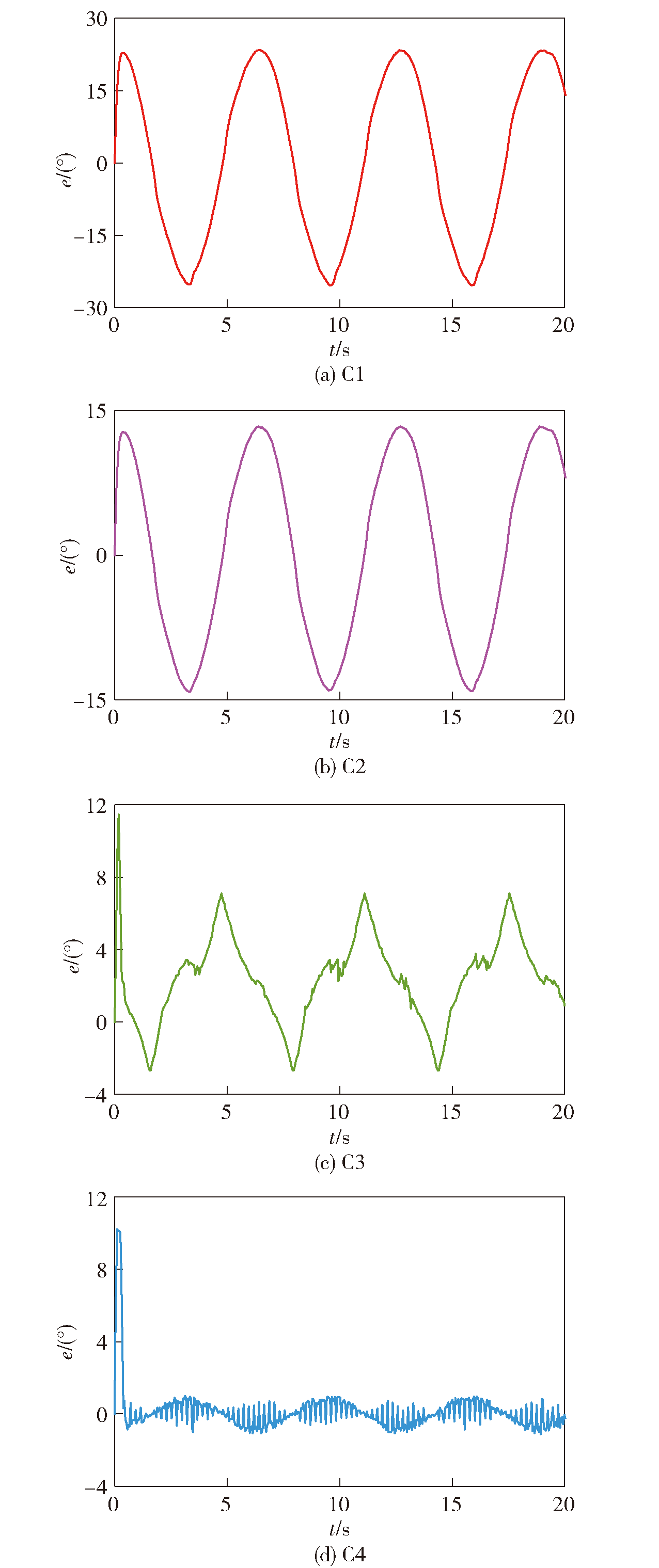
Fig.17 Sinusoidal tracking error
| 控制器 | 指标 | ||
|---|---|---|---|
| Me | μ | σ | |
| C1 | 25.436 | 15.698 | 7.026 |
| C2 | 14.176 | 8.926 | 3.977 |
| C3 | 11.461 | 2.834 | 1.850 |
| C4 | 10.221 | 0.629 | 1.193 |
Table 4 Performance indicators(°)
| 控制器 | 指标 | ||
|---|---|---|---|
| Me | μ | σ | |
| C1 | 25.436 | 15.698 | 7.026 |
| C2 | 14.176 | 8.926 | 3.977 |
| C3 | 11.461 | 2.834 | 1.850 |
| C4 | 10.221 | 0.629 | 1.193 |
| [1] |
牟方厉, 吴丹, 董云飞. 具有多层感知器力矩补偿的机器人自抗扰控制[J]. 控制理论与应用, 2020, 37(6): 1397-1405.
|
|
|
|
| [2] |
王立新, 赵丁选, 刘福才, 等. 电液比例伺服力加载自抗扰控制[J]. 机械工程学报, 2020, 56(18): 216-225.
doi: 10.3901/JME.2020.18.216 |
|
|
|
| [3] |
徐驰, 赵希梅. 永磁直线同步电动机智能递归非奇异终端滑模控制[J]. 控制理论与应用, 2022, 39(7): 1242-1250.
|
|
|
|
| [4] |
聂守成, 钱林方, 陈志群, 等. 基于干扰观测器的弹丸协调器电液伺服系统自适应滑模控制[J]. 兵工学报, 2020, 41(9): 1745-1751.
doi: 10.3969/j.issn.1000-1093.2020.09.006 |
|
|
|
| [5] |
苗双全, 张宝泉, 王明超, 等. 基于扰动观测器的机载光电稳定平台自适应指数时变滑模控制[J]. 兵工学报, 2022, 43(7): 1636-1645.
doi: 10.12382/bgxb.2021.0229 |
|
|
|
| [6] |
丁力, 姚勇, 巢渊, 等. 面向水质采样的绳驱动空中机械臂抗干扰控制[J]. 农业机械学报, 2022, 53(8):452-458.
|
|
|
|
| [7] |
王会明, 张扬, 王雪闯. 移动机器人的线性自抗扰控制设计与实验验证[J]. 控制理论与应用, 2022, 39(7): 1289-1296.
|
|
|
|
| [8] |
于欣波, 贺威, 薛程谦, 等. 基于扰动观测器的机器人自适应神经网络跟踪控制研究[J]. 自动化学报, 2019, 45(7): 1307-1324.
|
|
|
|
| [9] |
|
| [10] |
吴宏鑫, 胡军, 解永春. 基于特征模型的智能自适应控制[M]. 北京: 中国科学技术出版社, 2009.
|
|
|
|
| [11] |
孟斌, 唐青原, 吴宏鑫. 特征模型理论及其在火星气动捕获制导中的应用[J]. 中国科学:技术科学, 2020, 50(5): 483-492.
|
|
doi: 10.1360/SST-2019-0304 URL |
|
| [12] |
李超, 何英姿, 胡勇. 基于特征模型的挠性航天器接触消旋控制[J]. 空间控制技术与应用, 2022, 48(2):54-61.
|
|
|
|
| [13] |
张世俊, 邢琰. 参数不确定机器人关节特征建模与自适应控制研究[J]. 载人航天, 2019, 25(5): 625-630.
|
|
|
|
| [14] |
高熠, 吴益飞, 关妍. 基于特征模型的双电机伺服系统2阶离散滑模控制[J]. 机械设计与制造工程, 2020, 49(3): 29-34.
|
|
|
|
| [15] |
王翔, 吴益飞, 高阳, 等. 基于扩展状态观测器的伺服系统特征建模和自适应滑模控制[J]. 南京理工大学学报(自然科学版), 2019, 43(3): 261-268,274.
|
|
|
|
| [16] |
doi: 10.1016/j.isatra.2014.03.003 pmid: 24742958 |
| [17] |
|
| [18] |
|
| [19] |
doi: 10.1109/TCST.2015.2493119 URL |
| [20] |
吴宏鑫, 王颖, 解永春. 非线性系统的特征建模与控制方法[J]. 控制工程, 2002(6):1-7.
|
|
|
| [1] | YU Yongwei, PENG Xi, DU Liuqing, CHEN Tianhao. Real-time Detection of Parts by Assembly Robot Based on Deep Learning Framework [J]. Acta Armamentarii, 2020, 41(10): 2122-2130. |
| [2] | LI Yan-biao, LI Jing-min, JI Shi-ming, ZHENG Chao, ZHAO Zhang-feng. Dynamic Modeling and Peak Torque Prediction of Servo Motor for a 3-DOF Parallel Humanoid Mechanical Leg [J]. Acta Armamentarii, 2014, 35(11): 1928-1936. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||