
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (6): 1795-1808.doi: 10.12382/bgxb.2022.0081
Previous Articles Next Articles
SONG Jinchao, ZHAO Liangyu*( )
)
Received:2022-02-13
Online:2023-06-30
Contact:
ZHAO Liangyu
SONG Jinchao, ZHAO Liangyu. Attitude Pursuit GuidanceLaw for Coning Motion Stability of Spinning Missiles[J]. Acta Armamentarii, 2023, 44(6): 1795-1808.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Conversion between non-spinning and spinning missile coordinate systems
Fig.2 Angle of attack and angle of side-slip
Fig.3 Relationship of missile-to-target LOS in pitch plane
Fig.4 APG system of the strapdown seeker
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| CLα | 11.932 | CD | 0.507 | |
| Cmα | -0.7504 | Cmδ | 0.2583 | |
| Cmpa | -0.1848 | Cmq | 1.35 | |
| Td/s | 0.003 | kd | 1 | |
| Ts/s | 0.012 | μs | 0.5 | |
| τ1/ s | 0.016 | ks | 1 | |
| Ix/It | 0.0030 | V/(m·s-1) | 1200 | |
| τ2/s | 0.007 | p/(rad·s-1) | 8π | |
| l/m | 7.6 | S/m2 | 0.0707 | |
| λt/(°) | 44.9 | a1 | 0.2125 | |
| a2 | 0.2090 | b11 | -23.7524 | |
| b21 | -0.2706 | b3 | 6.5933 |
Table 1 Parameters of spinning missile
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| CLα | 11.932 | CD | 0.507 | |
| Cmα | -0.7504 | Cmδ | 0.2583 | |
| Cmpa | -0.1848 | Cmq | 1.35 | |
| Td/s | 0.003 | kd | 1 | |
| Ts/s | 0.012 | μs | 0.5 | |
| τ1/ s | 0.016 | ks | 1 | |
| Ix/It | 0.0030 | V/(m·s-1) | 1200 | |
| τ2/s | 0.007 | p/(rad·s-1) | 8π | |
| l/m | 7.6 | S/m2 | 0.0707 | |
| λt/(°) | 44.9 | a1 | 0.2125 | |
| a2 | 0.2090 | b11 | -23.7524 | |
| b21 | -0.2706 | b3 | 6.5933 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9930 | 0.9959 | 1.0003 |
| 0.10 | 1.0430 | 1.0459 | 1.0503 |
| 0.20 | 1.1430 | 1.1459 | 1.1513 |
Table 2 Lower limit of the control and guidance loop gain without delay angle
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9930 | 0.9959 | 1.0003 |
| 0.10 | 1.0430 | 1.0459 | 1.0503 |
| 0.20 | 1.1430 | 1.1459 | 1.1513 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 341.6 | 335.0 | 312.6 |
| 0.10 | 477.5 | 474.4 | 459.5 |
| 0.20 | 761.6 | 761.3 | 753.6 |
Table 3 Upper limit of the loop gain with λg=3°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 341.6 | 335.0 | 312.6 |
| 0.10 | 477.5 | 474.4 | 459.5 |
| 0.20 | 761.6 | 761.3 | 753.6 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.9 | 159.0 | 148.6 |
| 0.10 | 226.5 | 225.3 | 218.7 |
| 0.20 | 361.2 | 361.8 | 358.7 |
Table 4 Upper limit of the loop gain with λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.9 | 159.0 | 148.6 |
| 0.10 | 226.5 | 225.3 | 218.7 |
| 0.20 | 361.2 | 361.8 | 358.7 |
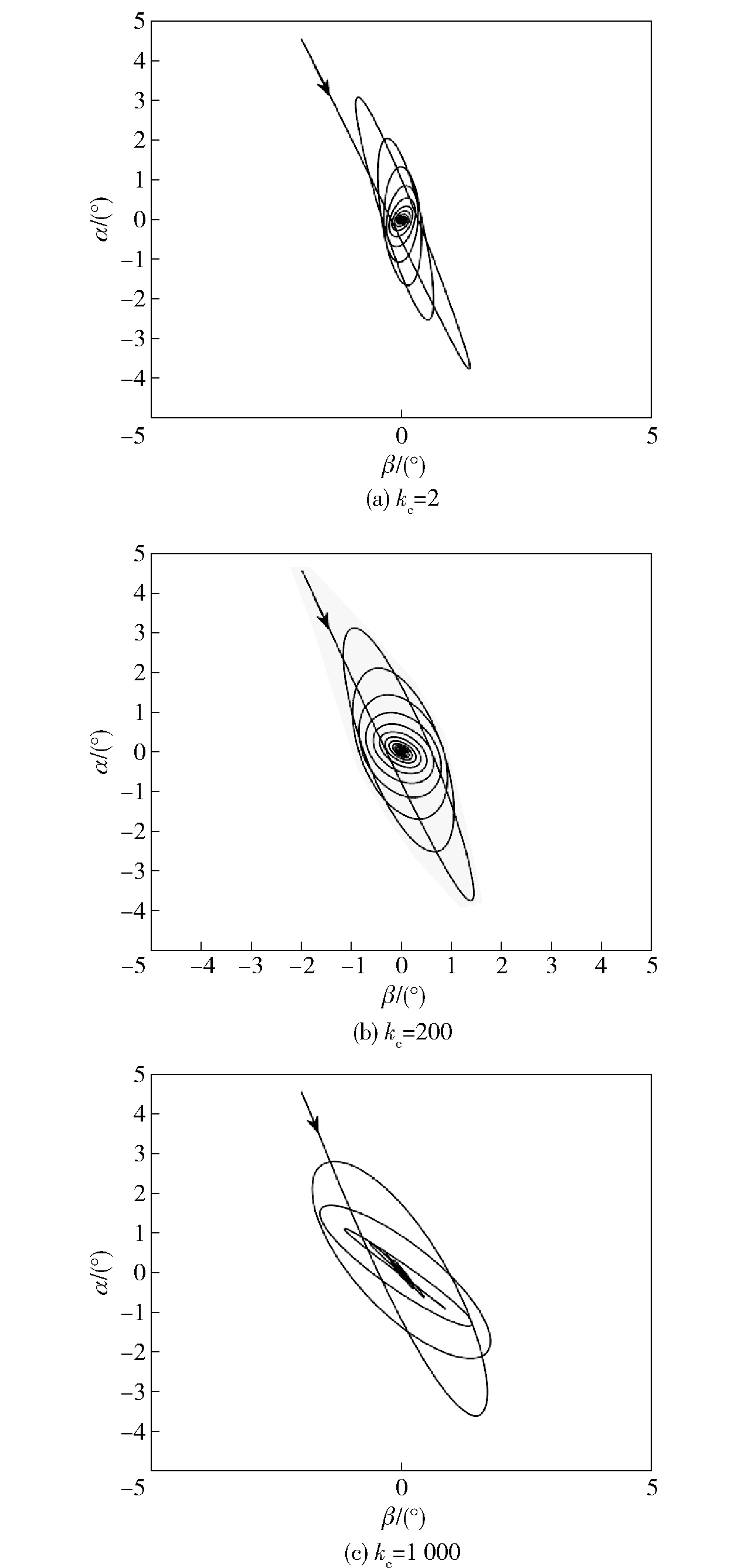
Fig.5 Convergent coning motion without considering seeker delay response
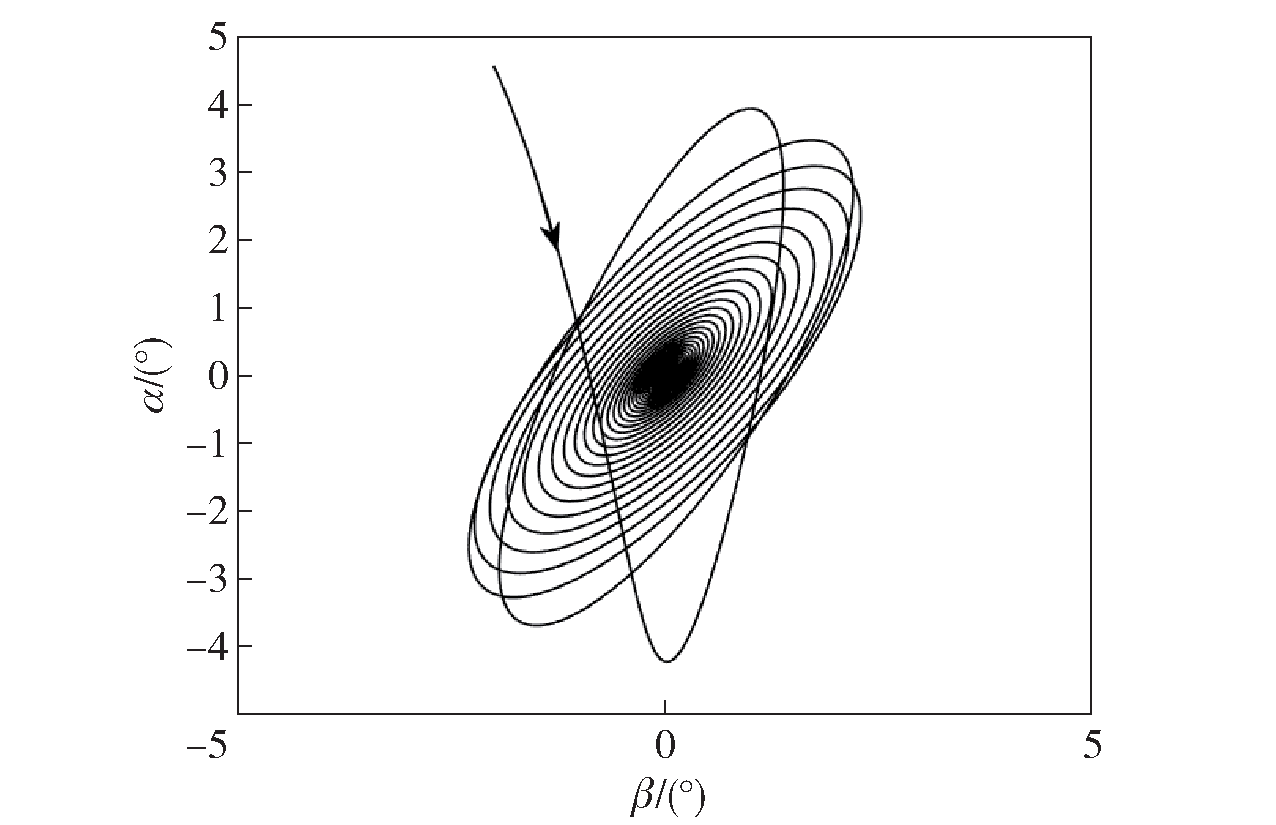
Fig.6 Convergent coning motion with λg=3°
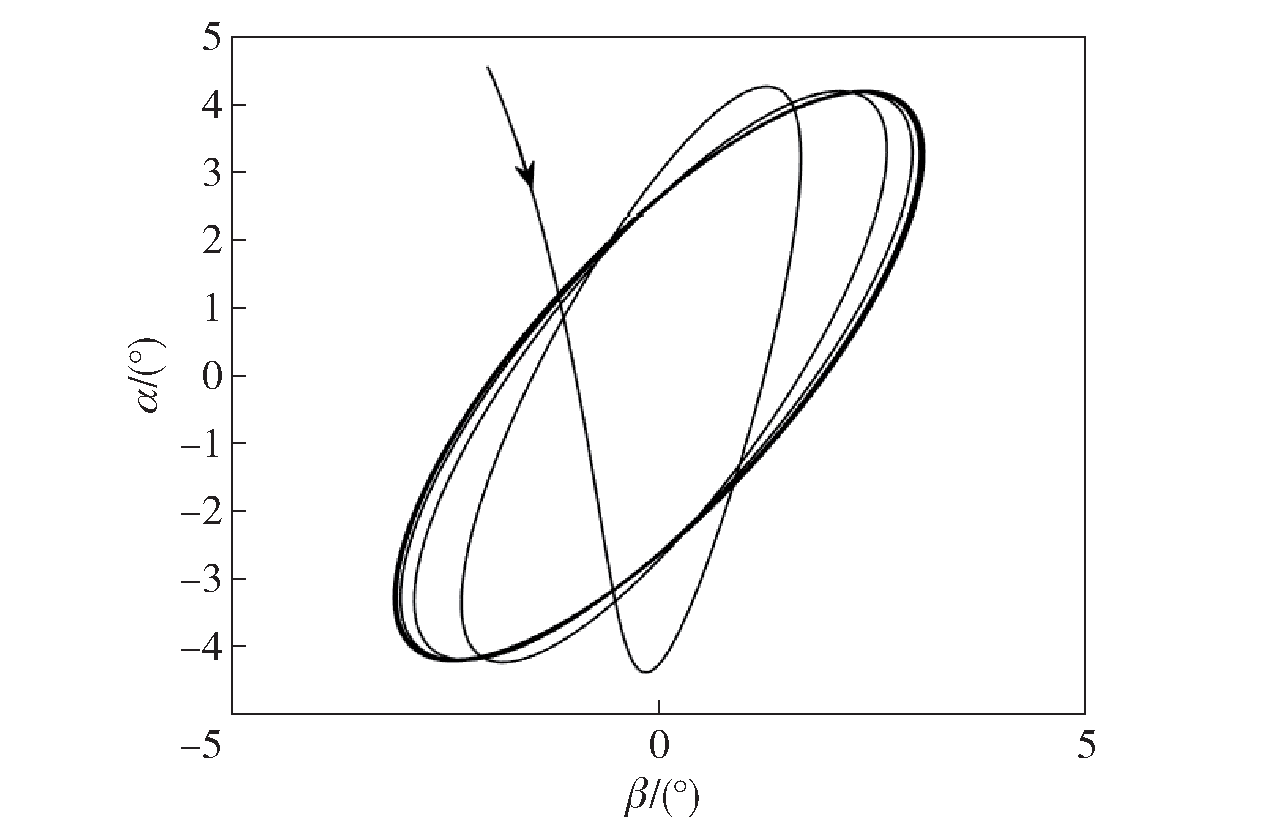
Fig.7 Critical stable coning motion with λg=3°

Fig.8 Divergent coning motion with λg=3°
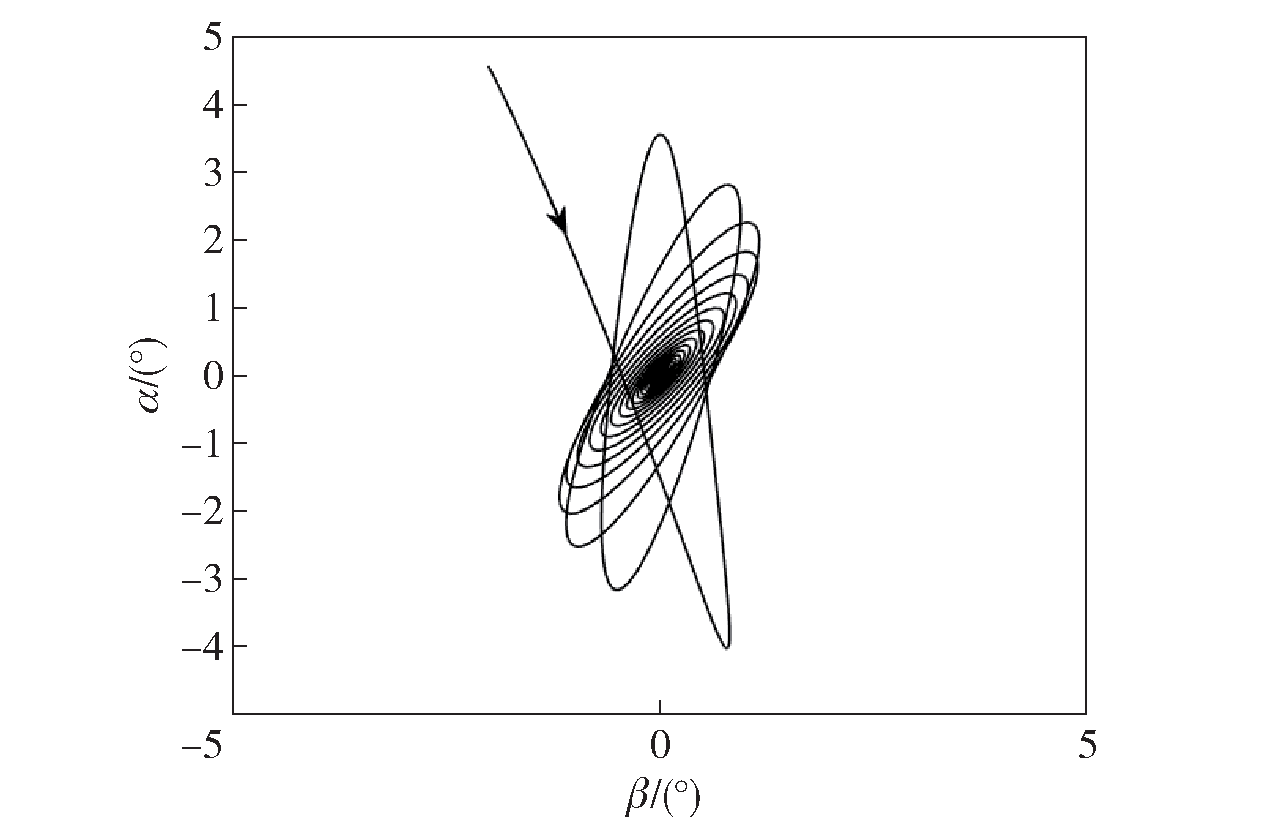
Fig.9 Convergent coning motion with λg=6°
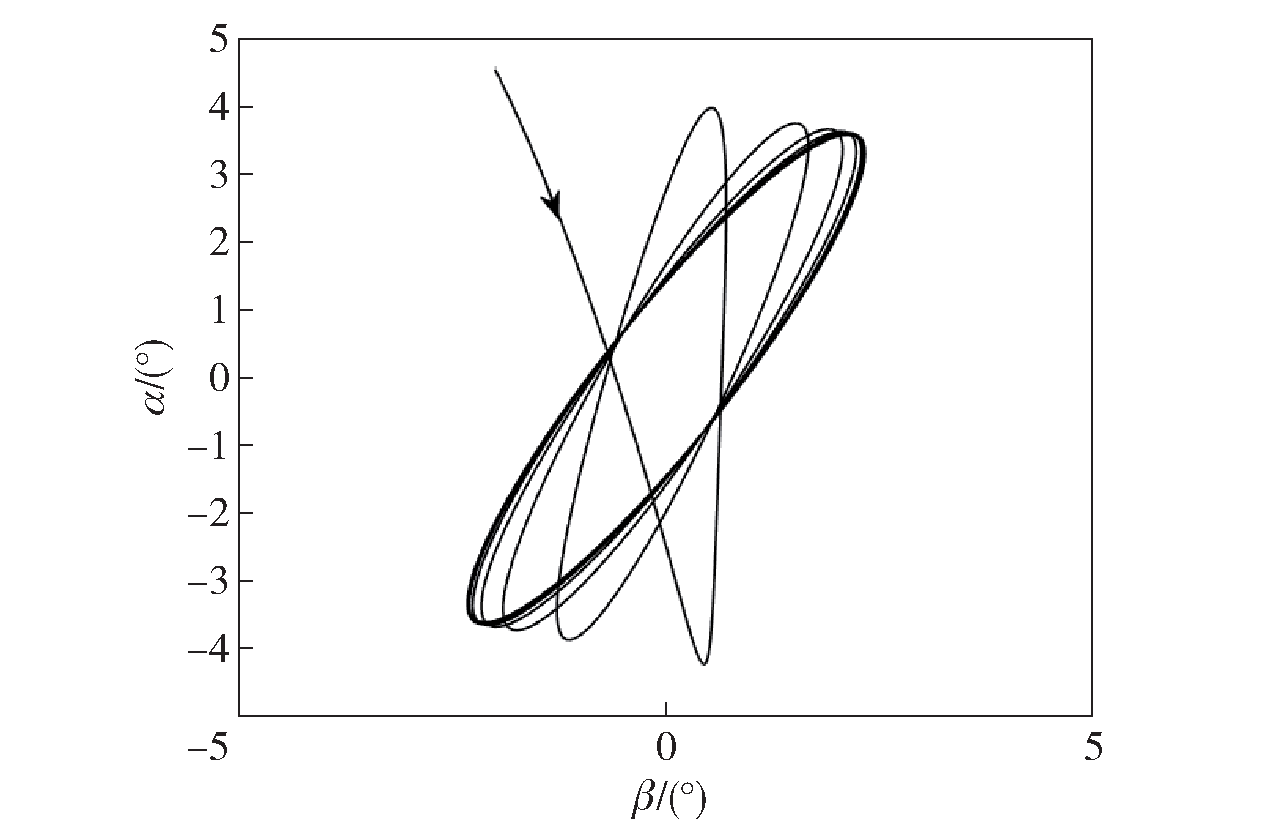
Fig.10 Critical stable coning motion with λg=6°

Fig.11 Divergent coning motion with λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9970 | 0.9999 | 1.0043 |
| 0.10 | 1.0470 | 1.0499 | 1.0543 |
| 0.20 | 1.1470 | 1.1499 | 1.1553 |
Table 5 Upper limit of the loop gain at kf=1.004
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9970 | 0.9999 | 1.0043 |
| 0.10 | 1.0470 | 1.0499 | 1.0543 |
| 0.20 | 1.1470 | 1.1499 | 1.1553 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9890 | 0.9919 | 1.0963 |
| 0.10 | 1.0390 | 1.0419 | 1.0463 |
| 0.20 | 1.1390 | 1.1419 | 1.1473 |
Table 6 Upper limit of the loop gain at kf=0.996
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9890 | 0.9919 | 1.0963 |
| 0.10 | 1.0390 | 1.0419 | 1.0463 |
| 0.20 | 1.1390 | 1.1419 | 1.1473 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 340.9 | 336.3 | 316.0 |
| 0.10 | 476.5 | 475.6 | 463.1 |
| 0.20 | 759.0 | 762.1 | 757.0 |
Table 7 Upper limit of the loop gain with, kf=1.004,λg=3°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 340.9 | 336.3 | 316.0 |
| 0.10 | 476.5 | 475.6 | 463.1 |
| 0.20 | 759.0 | 762.1 | 757.0 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 339.3 | 330.8 | 306.7 |
| 0.10 | 474.6 | 469.2 | 452.1 |
| 0.20 | 757.1 | 754.7 | 744.2 |
Table 8 Upper limit of the loop gain with kf=0.996,λg=3°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 339.3 | 330.8 | 306.7 |
| 0.10 | 474.6 | 469.2 | 452.1 |
| 0.20 | 757.1 | 754.7 | 744.2 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 162.3 | 159.5 | 149.0 |
| 0.10 | 227.0 | 226.0 | 219.1 |
| 0.20 | 361.8 | 362.3 | 358.9 |
Table 9 Upper limit of the loop gain with kf=1.004,λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 162.3 | 159.5 | 149.0 |
| 0.10 | 227.0 | 226.0 | 219.1 |
| 0.20 | 361.8 | 362.3 | 358.9 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.5 | 158.6 | 147.9 |
| 0.10 | 226.0 | 224.9 | 218.1 |
| 0.20 | 360.8 | 361.5 | 358.0 |
Table 10 Upper limit of the loop gain with kf=0.996,λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.5 | 158.6 | 147.9 |
| 0.10 | 226.0 | 224.9 | 218.1 |
| 0.20 | 360.8 | 361.5 | 358.0 |
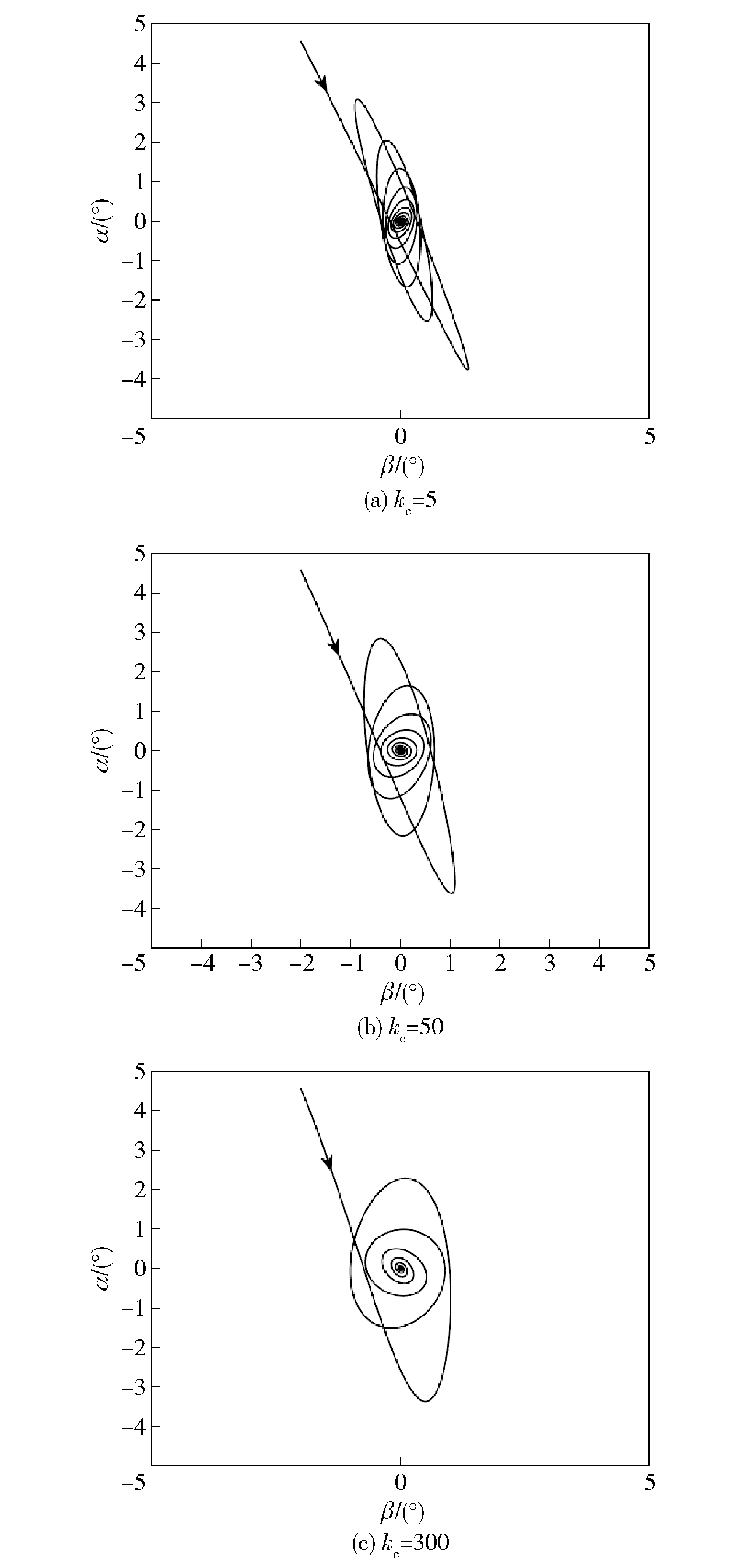
Fig.12 Convergent coning motion considering the gyro scale-factor error
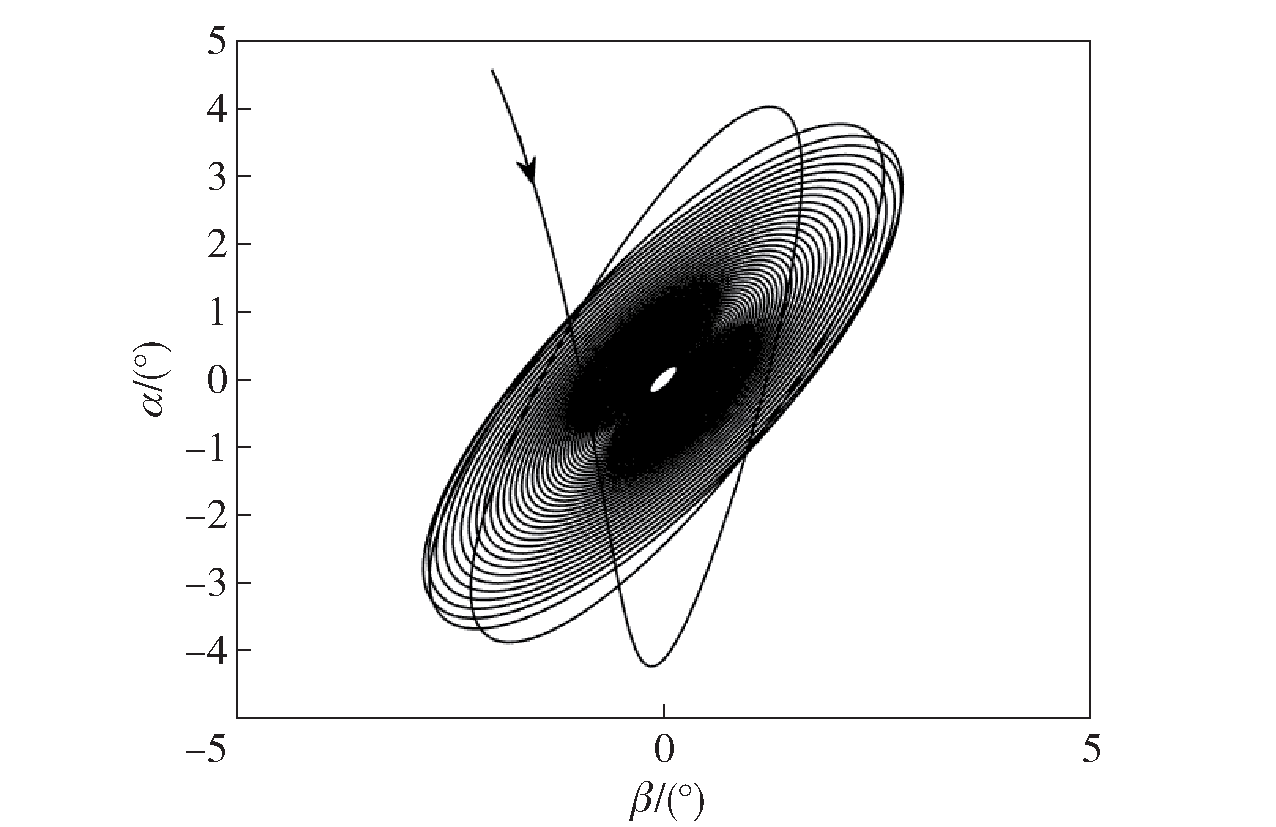
Fig.13 Convergent coning motion with λg=3°、kf=1.004
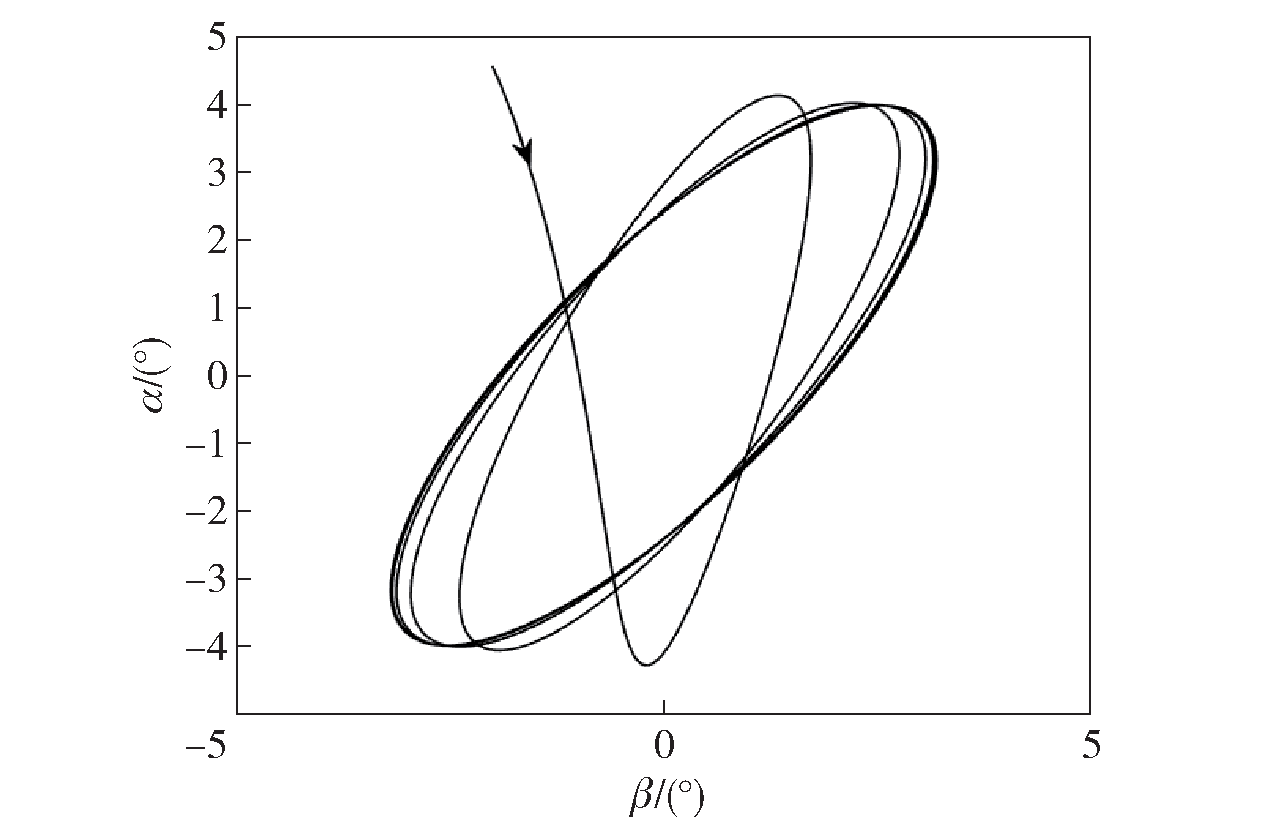
Fig.14 Critical stable coning motion with λg=3°、kf=1.004

Fig.15 Divergent coning motion with λg=3°、kf=1.004
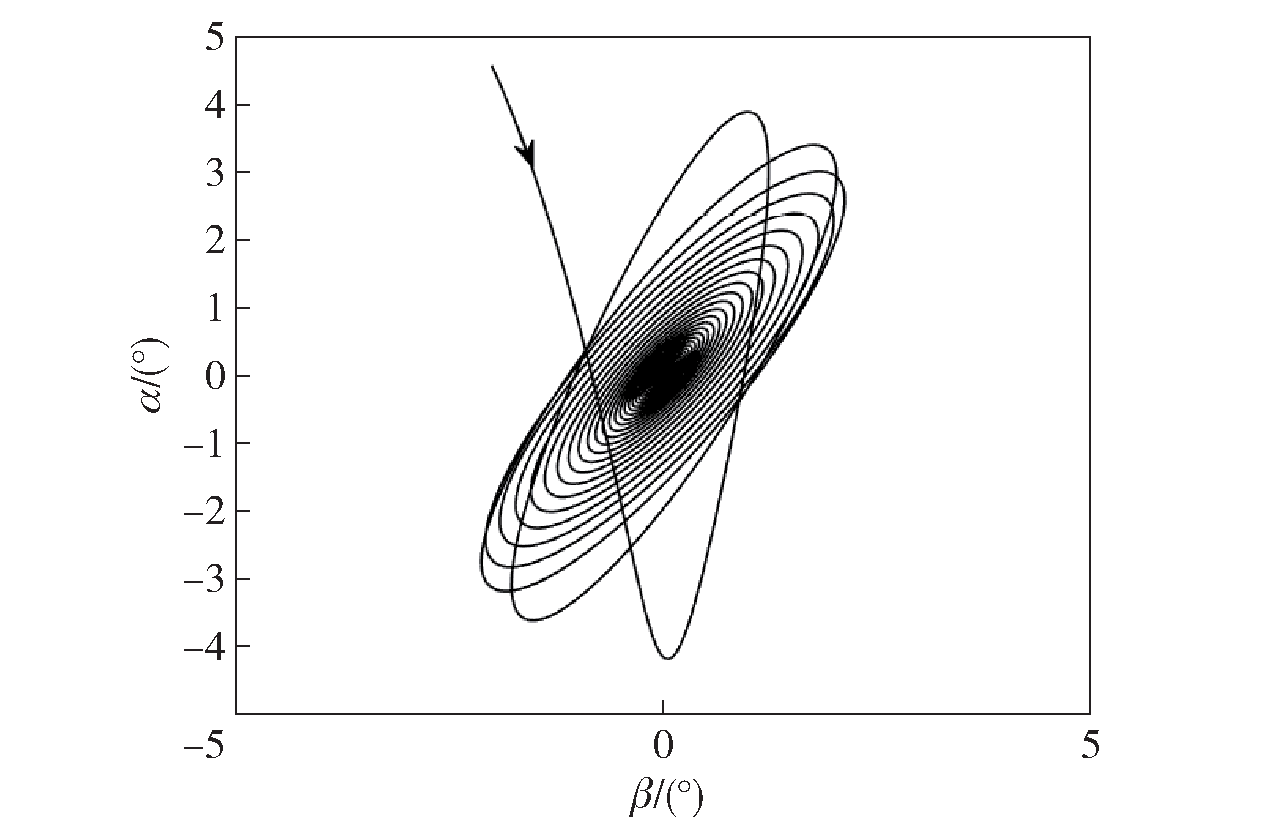
Fig.16 Convergent coning motion with λg=6°、kf=0.996
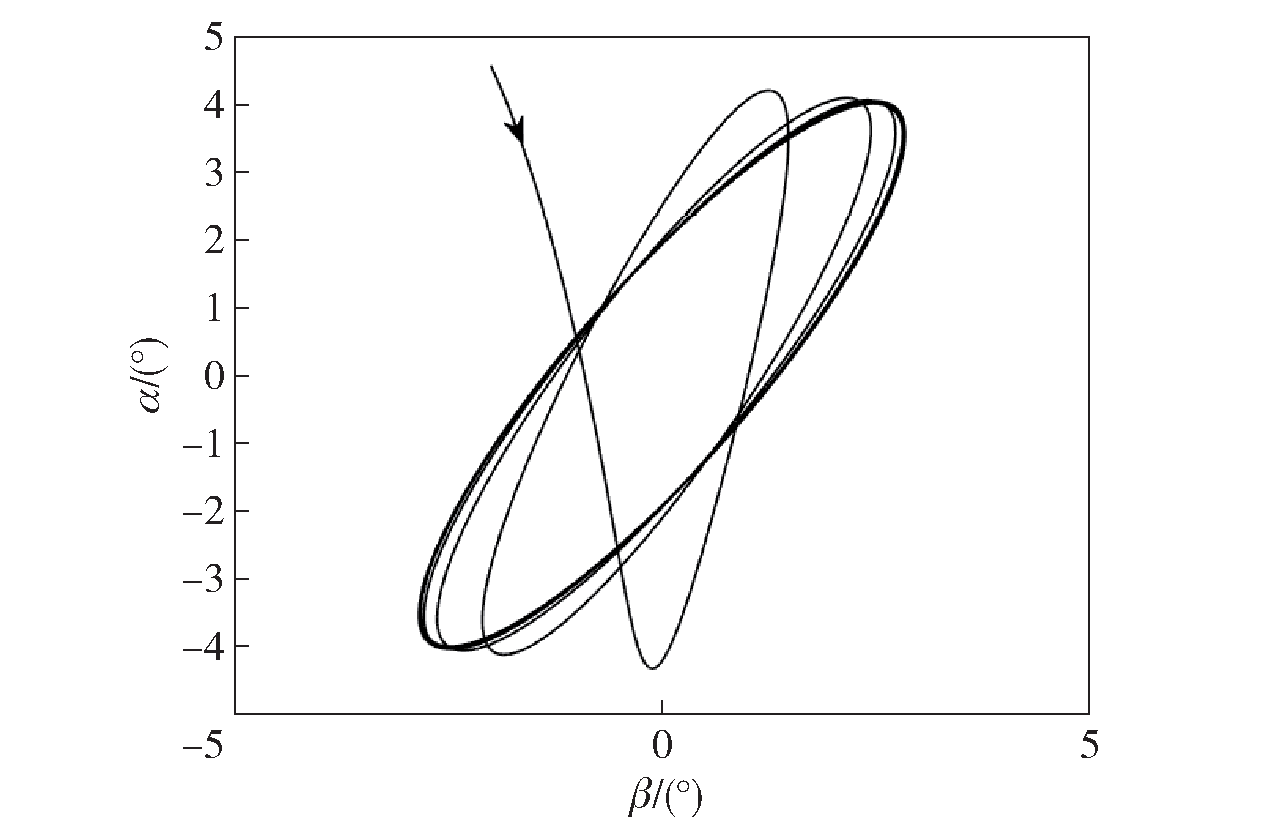
Fig.17 Critical stable coning motion with λg=6°、kf=0.996

Fig.18 Divergent coning motion with λg=6°、kf=0.996
| [1] |
杨树兴. 陆军多管火箭武器的发展与思考[J]. 兵工学报, 2016, 37(7):1299-1305.
doi: 10.3969/j.issn.1000-1093.2016.07.019 |
|
|
|
| [2] |
陈成, 赵良玉, 谢浩怡, 等. 单通道控制旋转弹角运动的复分析方法[J]. 兵工学报, 2021, 42(2):308-319.
|
|
doi: 10.3969/j.issn.1000-1093.2021.02.009 |
|
| [3] |
丁天宝, 何朝, 王良明, 等. 高速旋转炮弹宽海拔弹道解算方法[J]. 兵工学报, 2021, 42(1):209-213.
|
|
doi: 10.3969/j.issn.1000-1093.2021.01.024 |
|
| [4] |
杨树兴, 赵良玉, 闫晓勇. 旋转弹动态稳定性理论[M]. 北京: 国防工业出版社, 2014.
|
|
|
|
| [5] |
doi: 10.2514/1.51627 URL |
| [6] |
|
| [7] |
陈亮, 刘荣忠, 郭锐, 等. 旋转尾翼弹箭极限圆锥运动稳定判据[J]. 兵工学报, 2019, 40(7): 1329-1339.
doi: 10.3969/j.issn.1000-1093.2019.07.001 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.001 |
|
| [8] |
舒敬荣, 李红星, 李宏玲. 非线性力矩作用下气动偏心弹丸强迫圆锥运动稳定性条件[J]. 兵工学报, 2018, 39(5): 875-882.
doi: 10.3969/j.issn.1000-1093.2018.05.006 |
|
|
|
| [9] |
吴映锋, 钟扬威, 王良明. 旋转稳定二维弹道修正弹在固定舵作用下的角运动特性研究[J]. 兵工学报, 2017, 38(7): 1263-1272.
doi: 10.3969/j.issn.1000-1093.2017.07.003 |
|
|
|
| [10] |
|
| [11] |
doi: 10.1016/j.ijleo.2016.10.042 URL |
| [12] |
|
| [13] |
|
| [14] |
doi: 10.1177/0954410012452367 URL |
| [15] |
doi: 10.1016/j.ast.2019.04.013 URL |
| [16] |
doi: 10.1016/j.ast.2017.03.036 URL |
| [17] |
doi: 10.1017/aer.2016.75 URL |
| [18] |
doi: 10.1016/j.ast.2017.10.007 URL |
| [19] |
doi: 10.1090/bull/2015-52-02 URL |
| [20] |
李克勇. 旋转导弹制导控制与稳定性问题研究[D]. 北京: 北京理工大学, 2014.
|
|
|
|
| [21] |
胡啸. 制导旋转弹稳定性研究[D]. 北京: 北京理工大学, 2019.
|
|
|
|
| [22] |
doi: 10.1016/S1000-9361(09)60227-2 URL |
| [23] |
沈浩, 祁载康. 提高弹体追踪制导律精度的研究[J]. 弹箭与制导学报, 2008, 28(4):7-10.
|
|
|
|
| [24] |
徐一航, 陈少松, 魏恺, 等. 正,余弦指令控制方式旋转导弹气动特性分析[J]. 哈尔滨工业大学学报, 2022, 54(1):114-122.
|
|
|
| [1] | LEI Juanmian, GAO Yi, YONG Zheng. Numerical Investigation of the Jet Interference Characteristics of a Lateral-jet-controlled Spinning Missile [J]. Acta Armamentarii, 2024, 45(1): 105-121. |
| [2] | ZHANG Xin, LIN Fan, SHEN Xinjie. A Lag Angle Test Method for Actuators of Spinning Missiles Based on Improved SOGI-FLL [J]. Acta Armamentarii, 2023, 44(2): 428-436. |
| [3] | ZHANG Long, ZHAO Zhi-qin, FAN Bin-ning, ZHANG Yan. Analysis on Coning Motion of High-speed Spin-stabilized Projectile Base on On-board Magnetic Test [J]. Acta Armamentarii, 2016, 37(12): 2235-2241. |
| [4] | SONG Tao, LIN De-fu, WEI Zhi-jun, LI Chuan. Research on Decoupling Algorithm for Control Coupling of a Spinning Missile Autopilot [J]. Acta Armamentarii, 2014, 35(4): 454-460. |
| [5] | SONG Xiang-hua, AN Wei-guang, JIANG Yun-hua. Non-probabilistic Reliability Analysis for Supercavitating Projectile Based on Dynamic Stability [J]. Acta Armamentarii, 2012, 33(8): 997-1003. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||