
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3478-3488.doi: 10.12382/bgxb.2022.0825
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
SHANG Zhe1,2,3, WANG Ting1,2,*( ), XU Yao4, WU Yingbiao5, SHAO Peiyao6, SHAO Shiliang1,2
), XU Yao4, WU Yingbiao5, SHAO Peiyao6, SHAO Shiliang1,2
Received:2022-09-14
Online:2023-02-08
Contact:
WANG Ting
CLC Number:
SHANG Zhe, WANG Ting, XU Yao, WU Yingbiao, SHAO Peiyao, SHAO Shiliang. Structural Design and Obstacle-surmounting Dynamics Research of Six-wheeled Rocker-type Mobile Robot[J]. Acta Armamentarii, 2023, 44(11): 3478-3488.
Add to citation manager EndNote|Ris|BibTeX
| 参数 | 取值 |
|---|---|
| 规格/mm | 1300×700×1200 |
| 爬坡角度/(°) | 30 |
| 越过障碍物高度/mm | 300 |
| 爬过一定尺寸的楼梯 | 国家标准室内人行台阶 |
Table 1 Design indexes of robot
| 参数 | 取值 |
|---|---|
| 规格/mm | 1300×700×1200 |
| 爬坡角度/(°) | 30 |
| 越过障碍物高度/mm | 300 |
| 爬过一定尺寸的楼梯 | 国家标准室内人行台阶 |
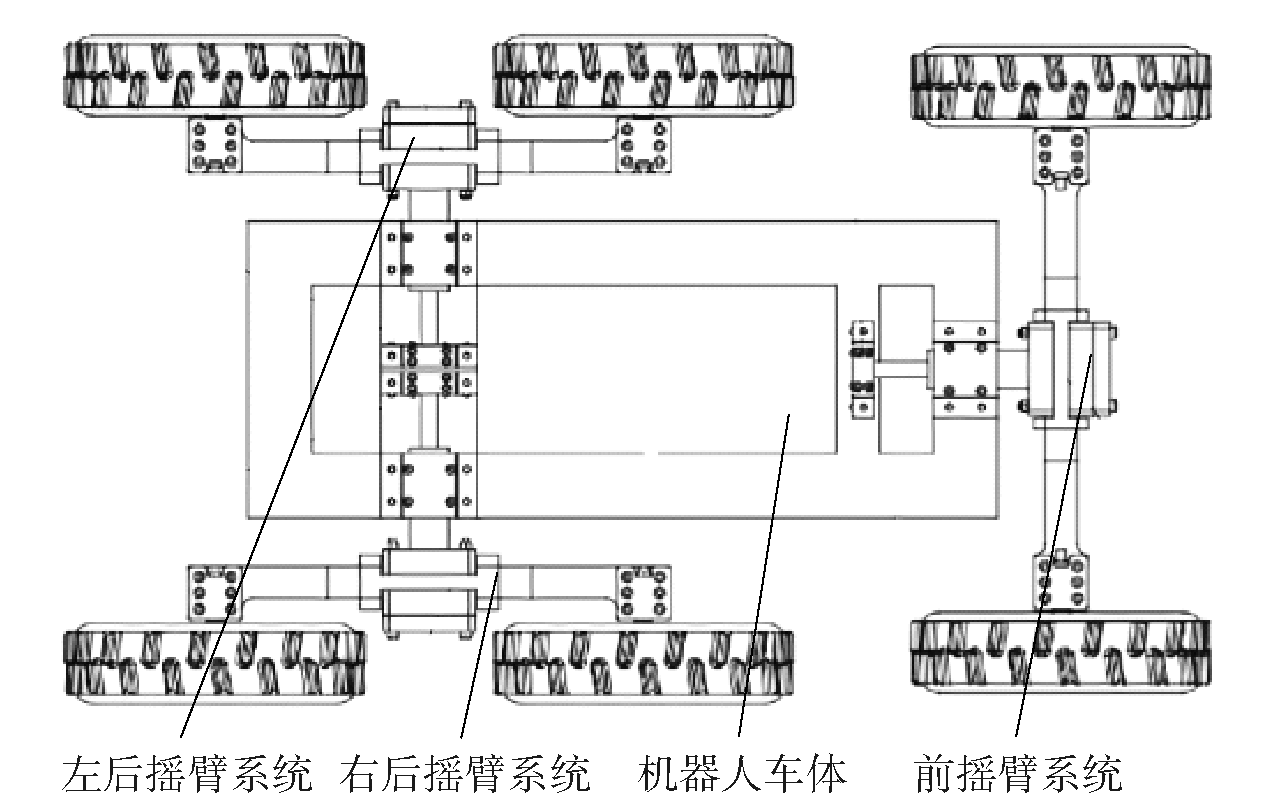
Fig.1 Schematic diagram of six-wheeled rocker-type robot
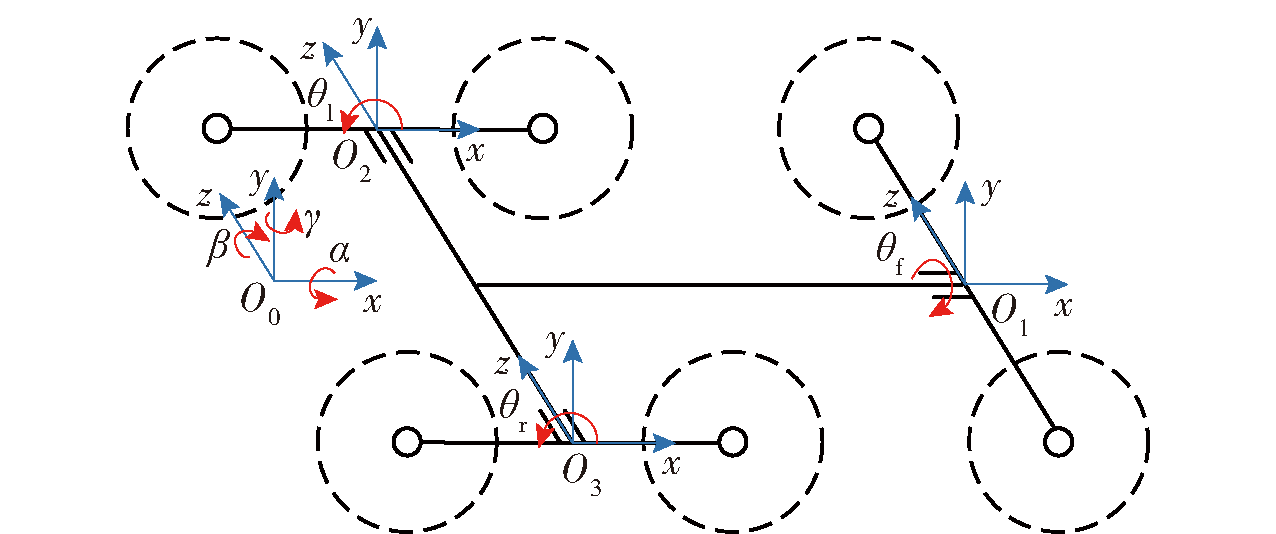
Fig.2 Mechanism sketch of six-wheeled rocker-type robot
| 参数 | 数值 |
|---|---|
| 最大速度v/(m·s-1) | 4 |
| 整体质量m/kg | 120 |
| 车轮半径R/mm | 190 |
| 前轮与后摇臂回转中心距L1/mm | 690 |
| 中轮与后轮中心距L2/mm | 460 |
Table 2 Main parameters of robot
| 参数 | 数值 |
|---|---|
| 最大速度v/(m·s-1) | 4 |
| 整体质量m/kg | 120 |
| 车轮半径R/mm | 190 |
| 前轮与后摇臂回转中心距L1/mm | 690 |
| 中轮与后轮中心距L2/mm | 460 |
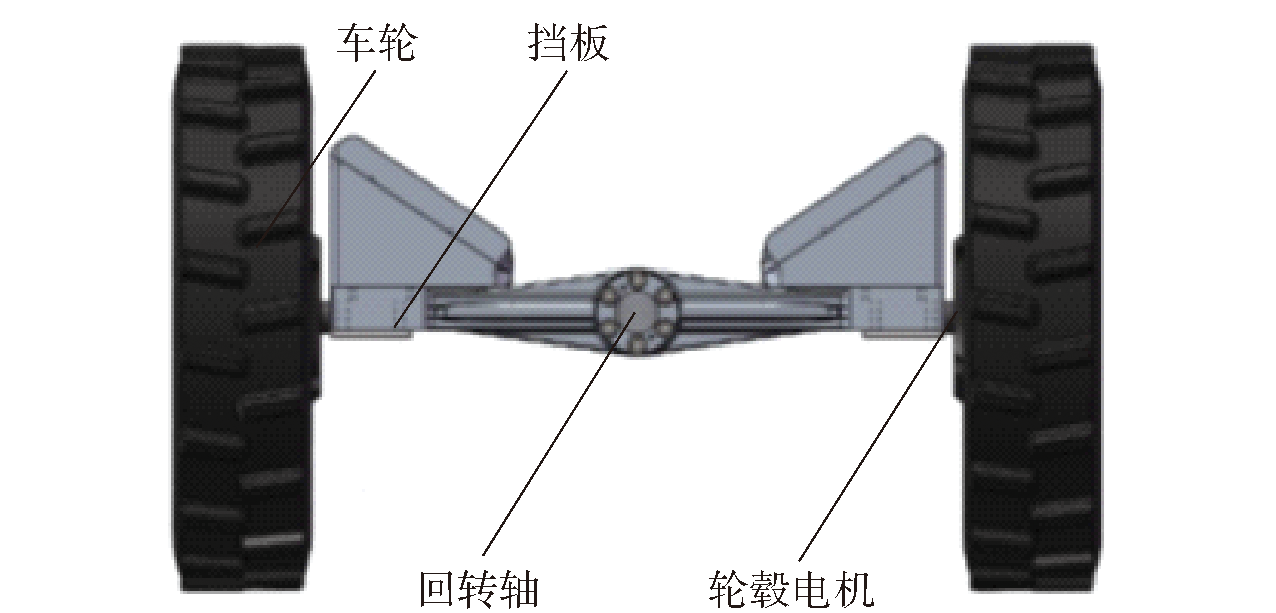
Fig.3 Structure diagram of front rocker arm

Fig.4 Structure diagram of left rear rocker arm
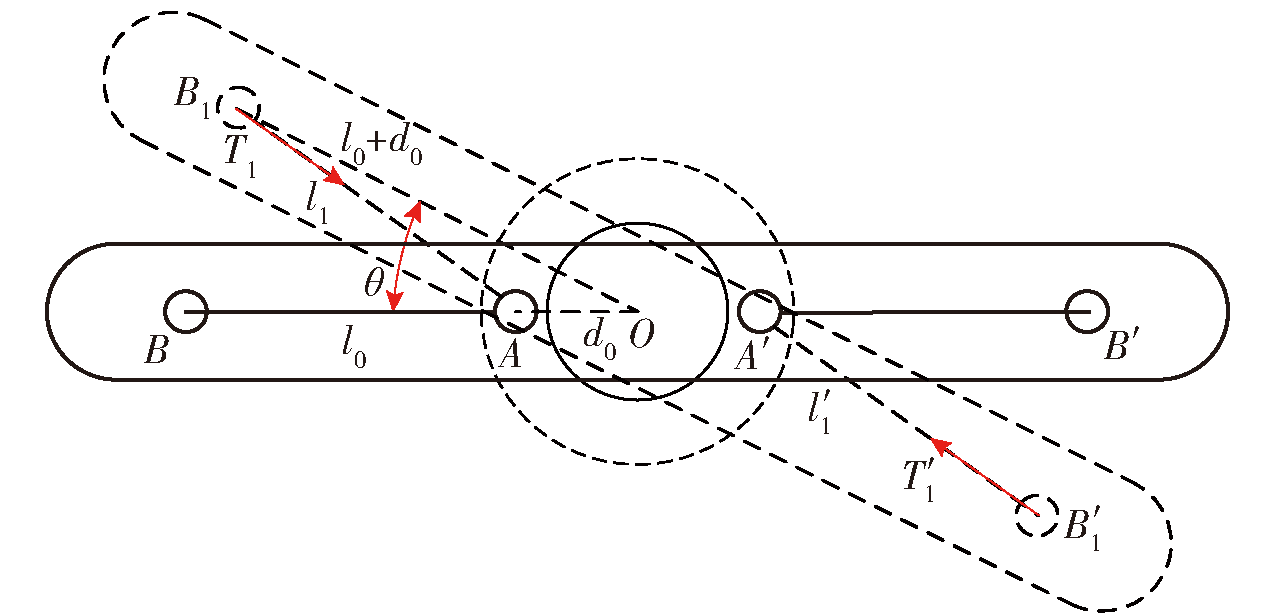
Fig.5 Principle diagram of shock absorption of tension spring
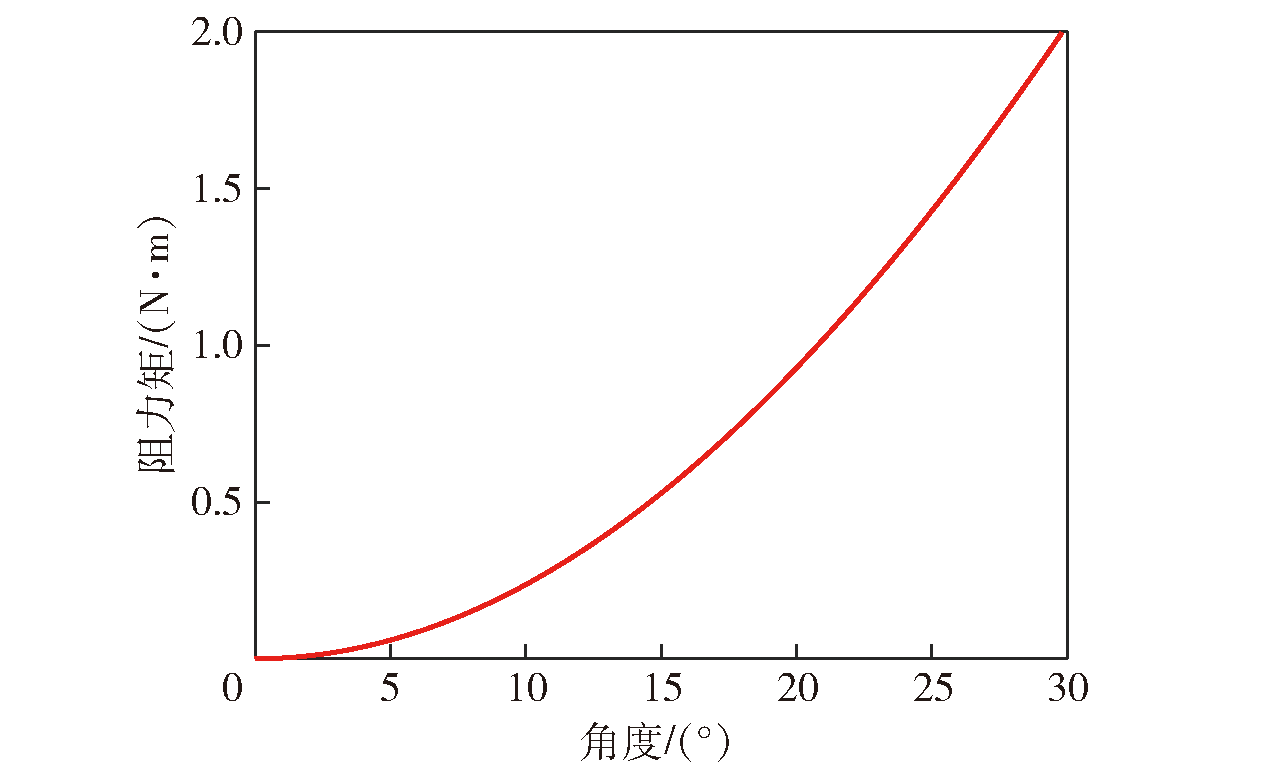
Fig.6 Relation curve of resistance moment
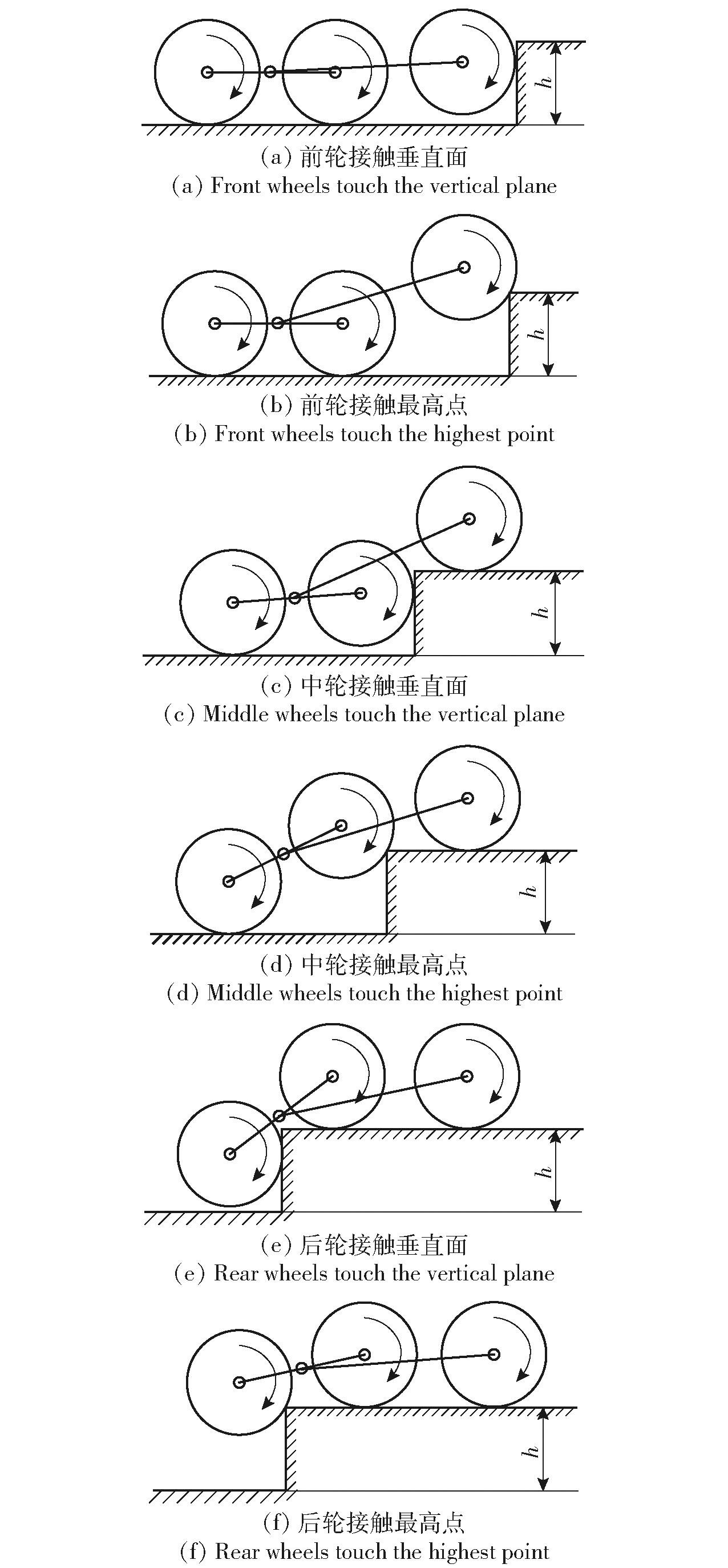
Fig.7 Obstacle surmounting process of robot
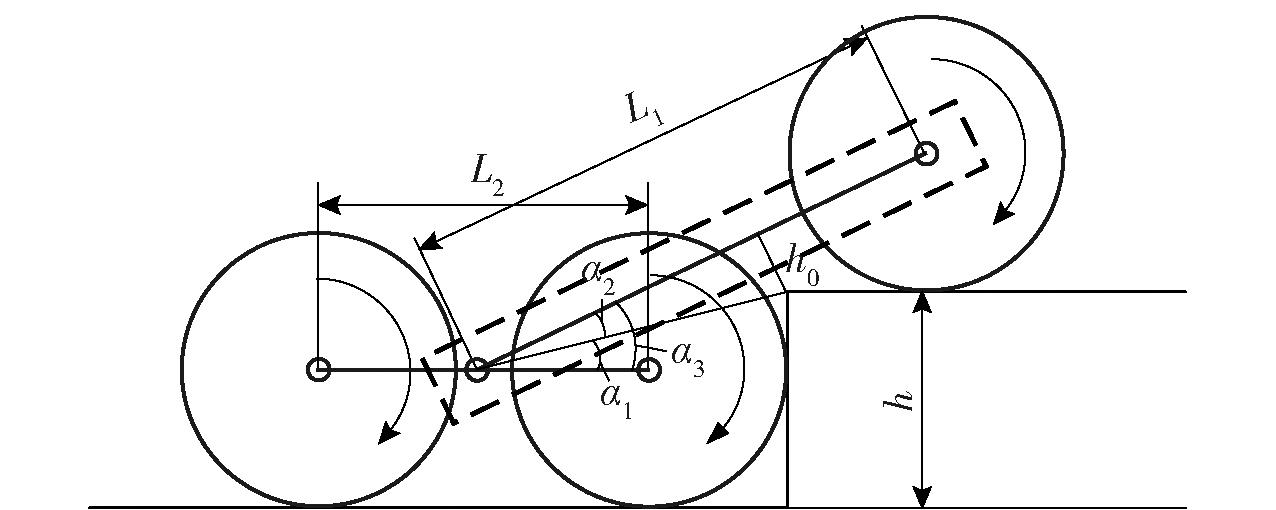
Fig.8 Geometric conditions for middle wheels to climb the steps
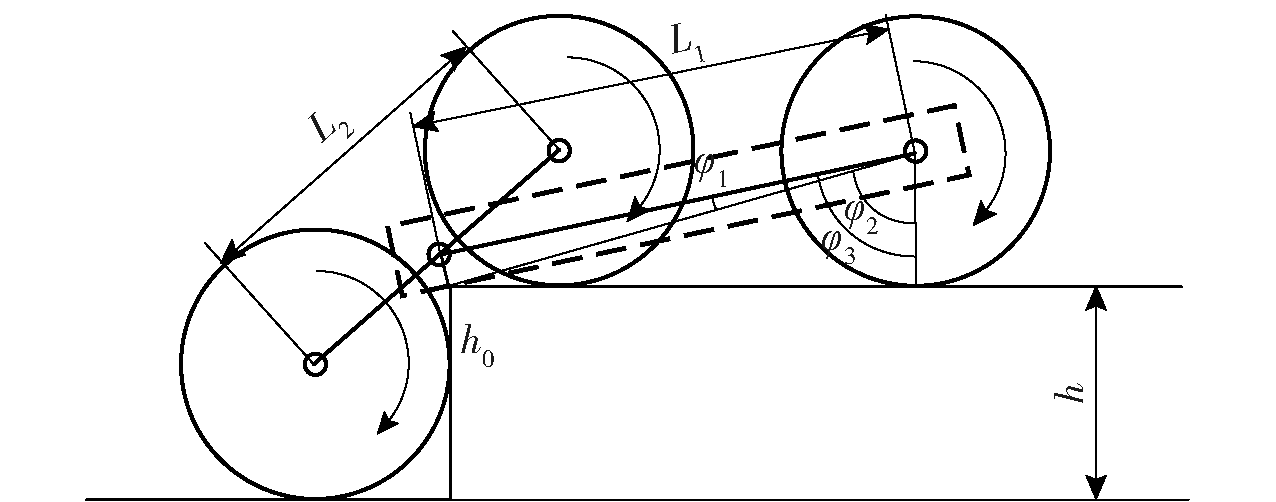
Fig.9 Geometric conditions for rear wheels to climb the steps
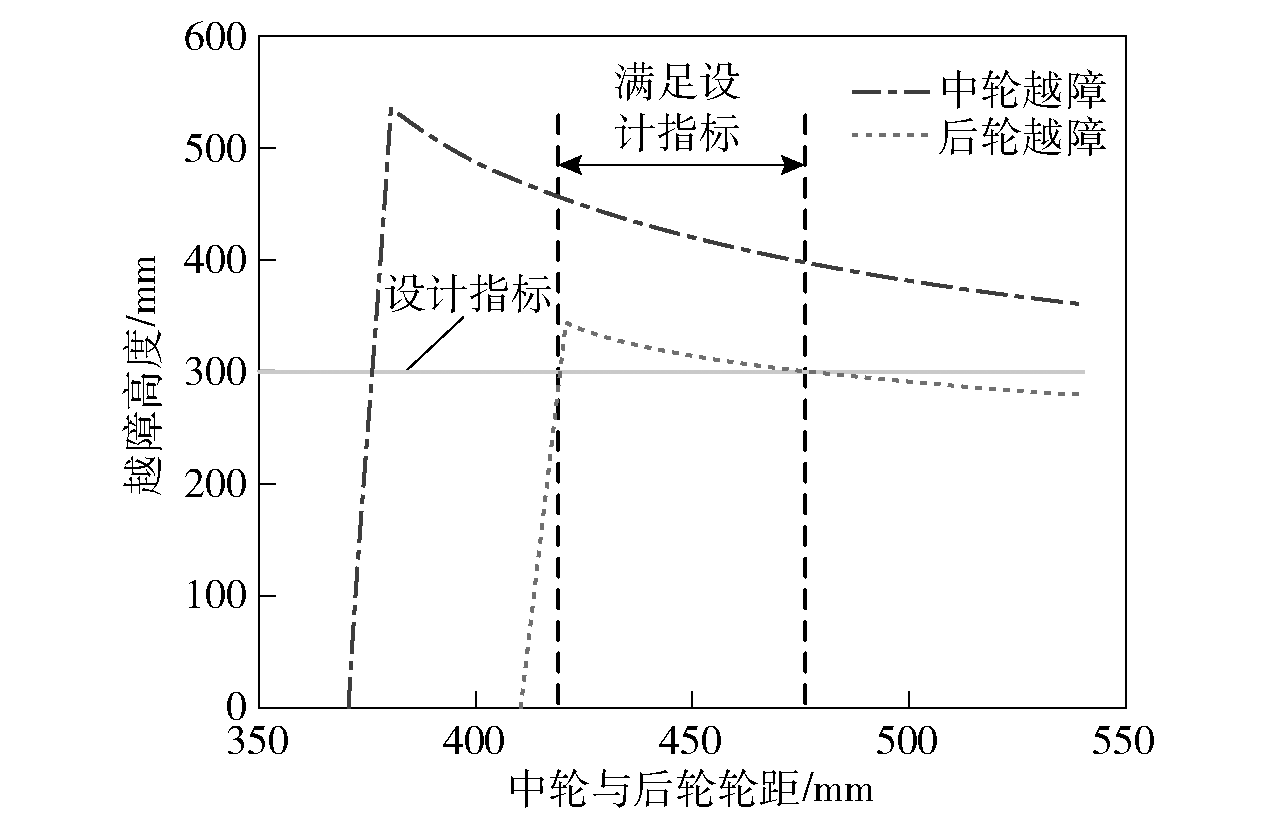
Fig.10 Relationship between wheel spacing and obstacle-surmounting height
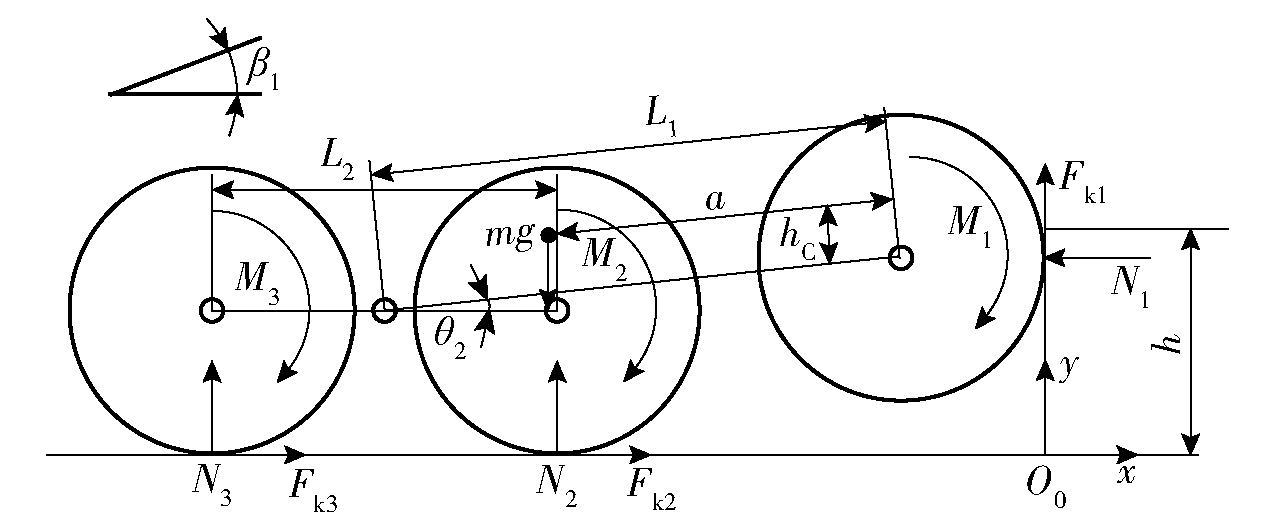
Fig.11 Force analysis of front wheels for obstacle surmounting
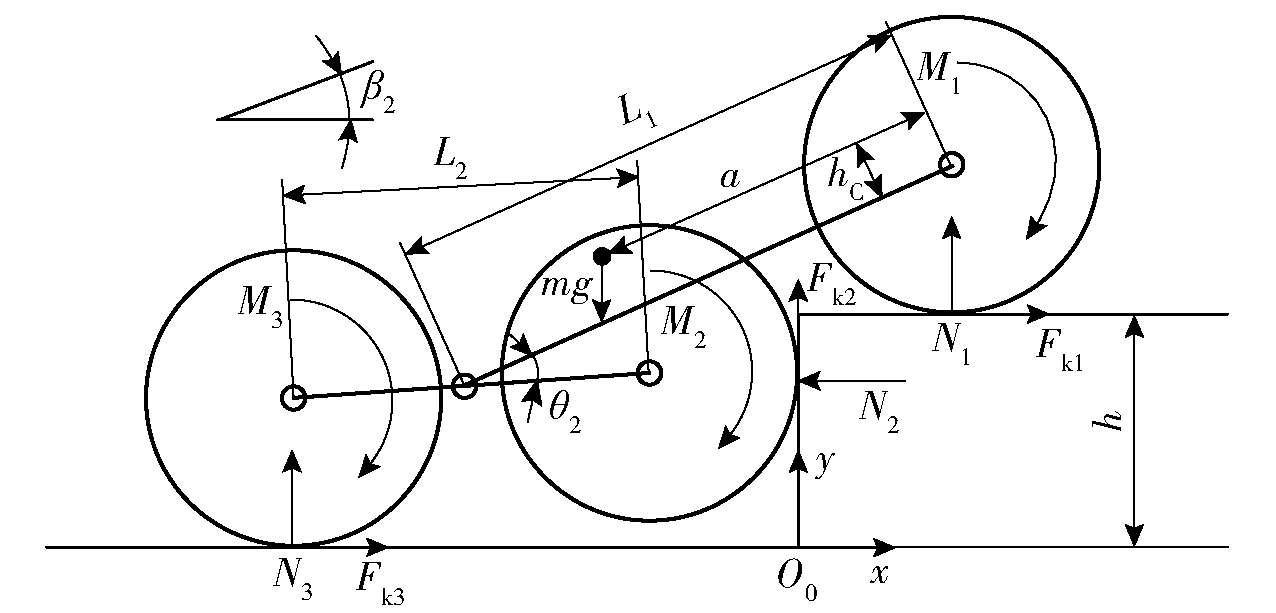
Fig.12 Force analysis of middle wheels for obstacle surmounting
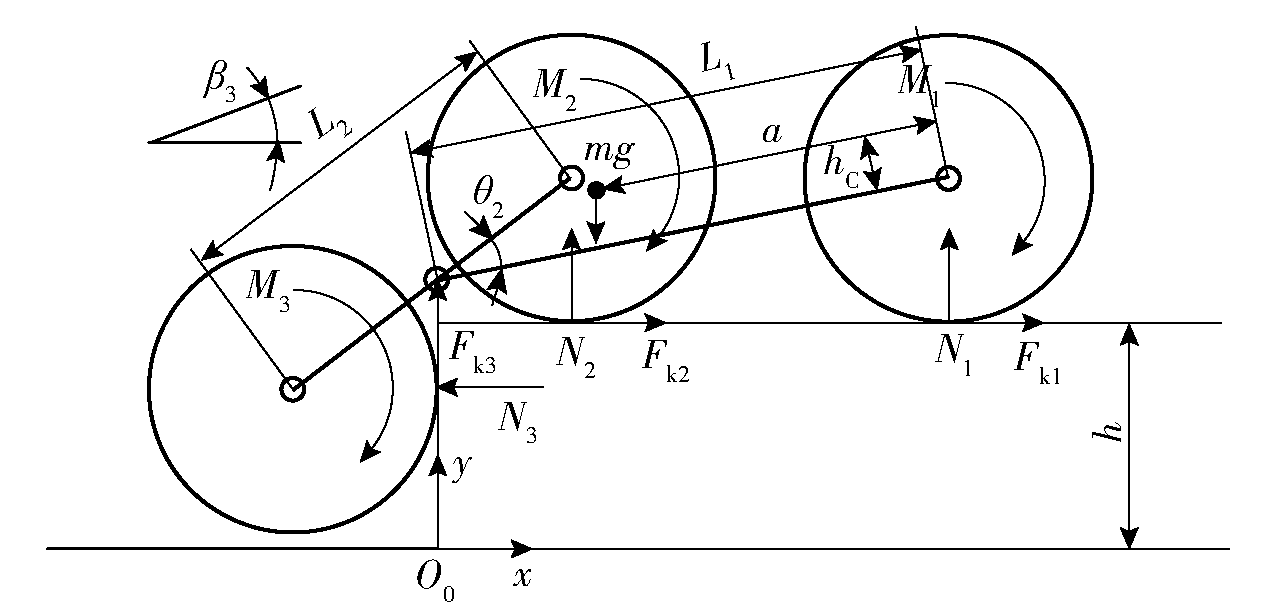
Fig.13 Force analysis of rear wheels for obstacle surmounting
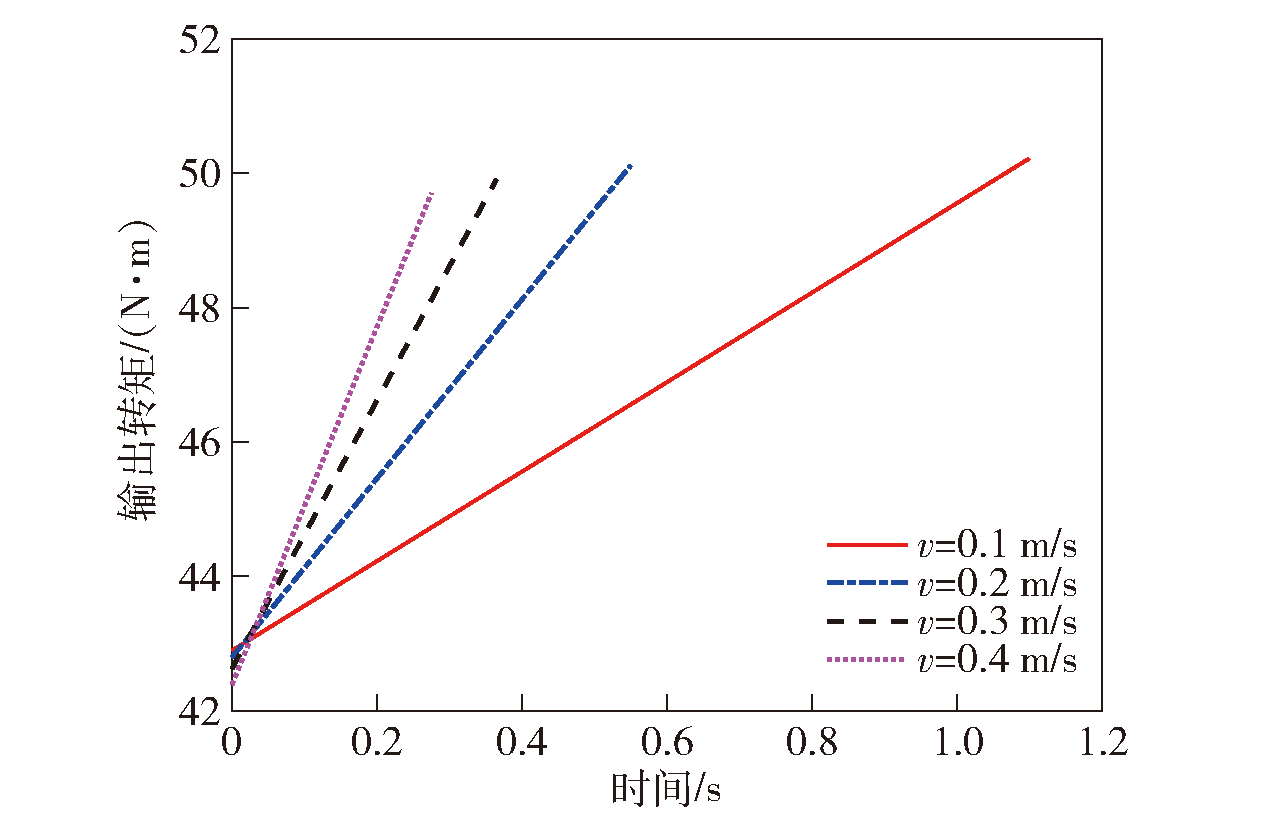
Fig.14 Effect of speed on output torques of rear wheel
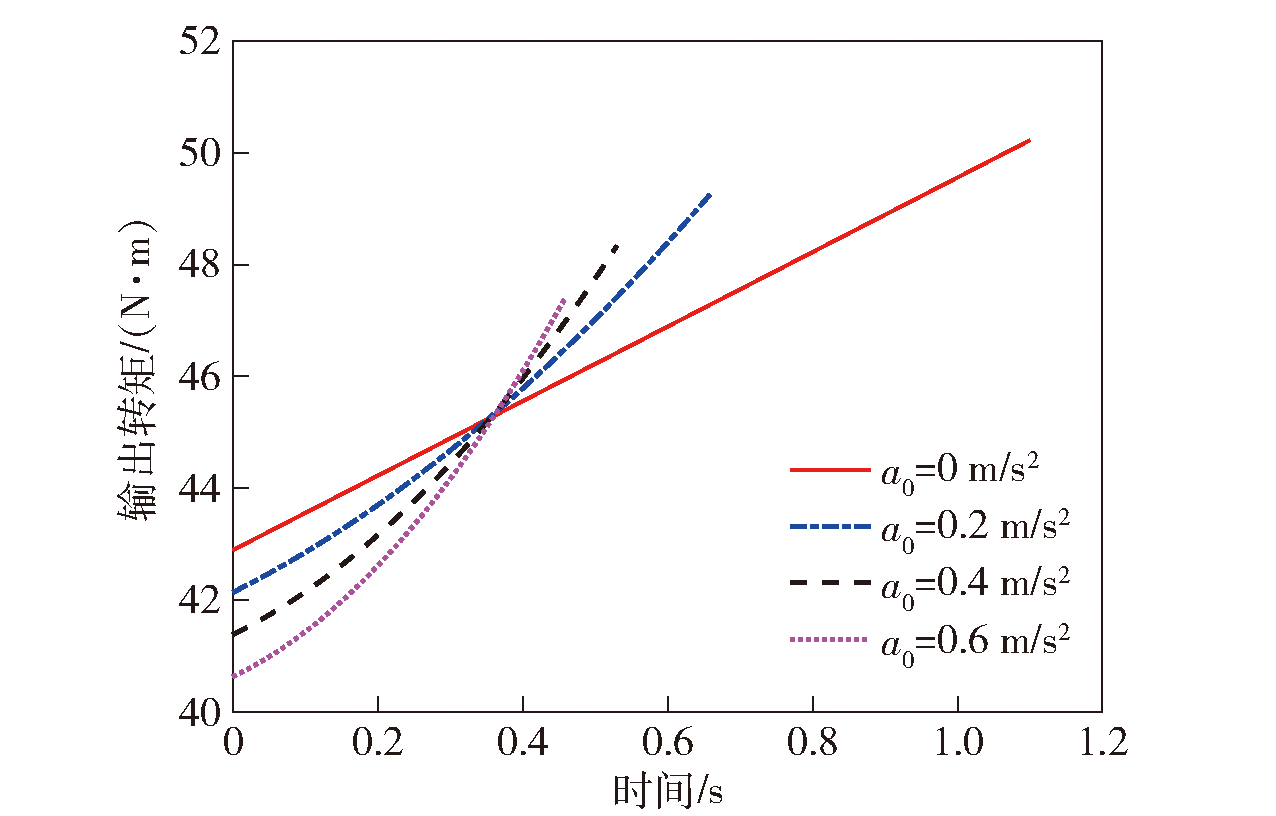
Fig.15 Effect of acceleration on output torques of rear wheel
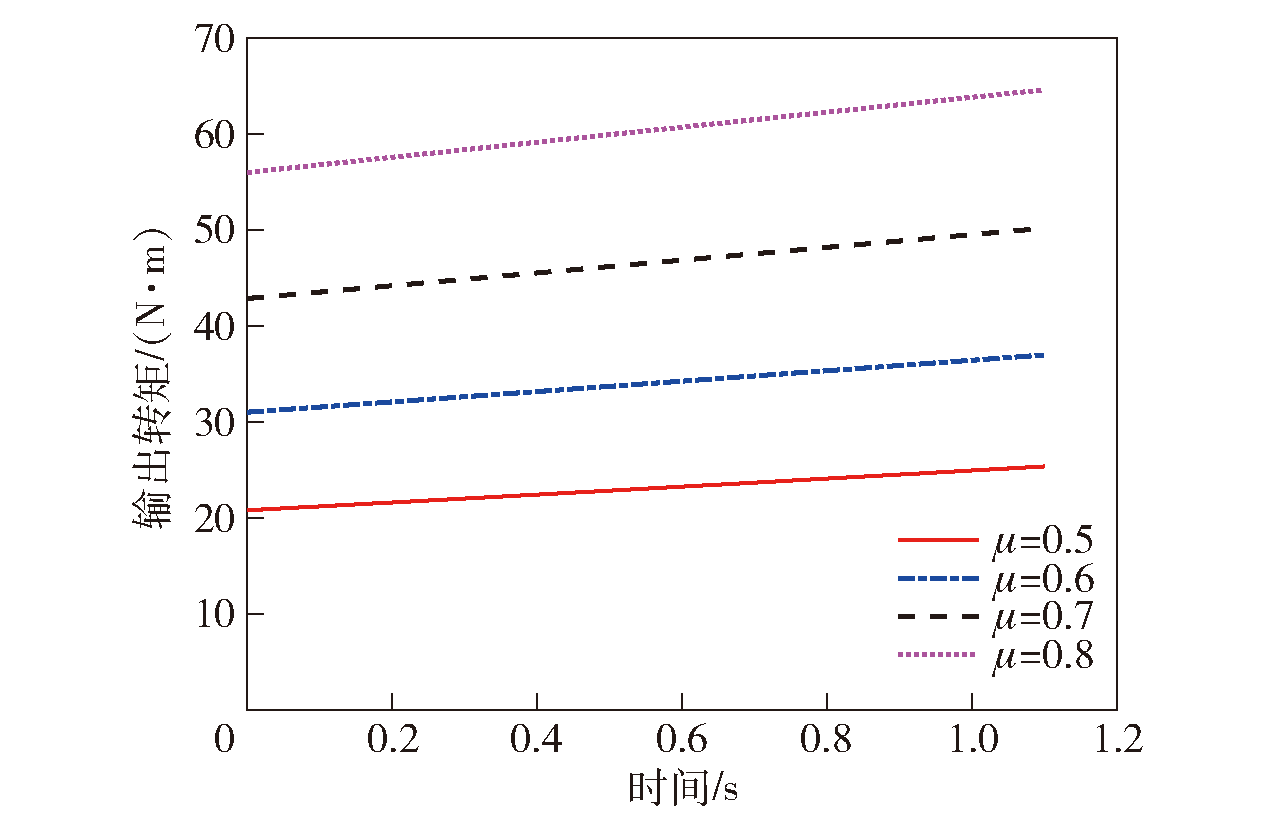
Fig.16 Effect of adhesion coefficient on output torques of rear wheel
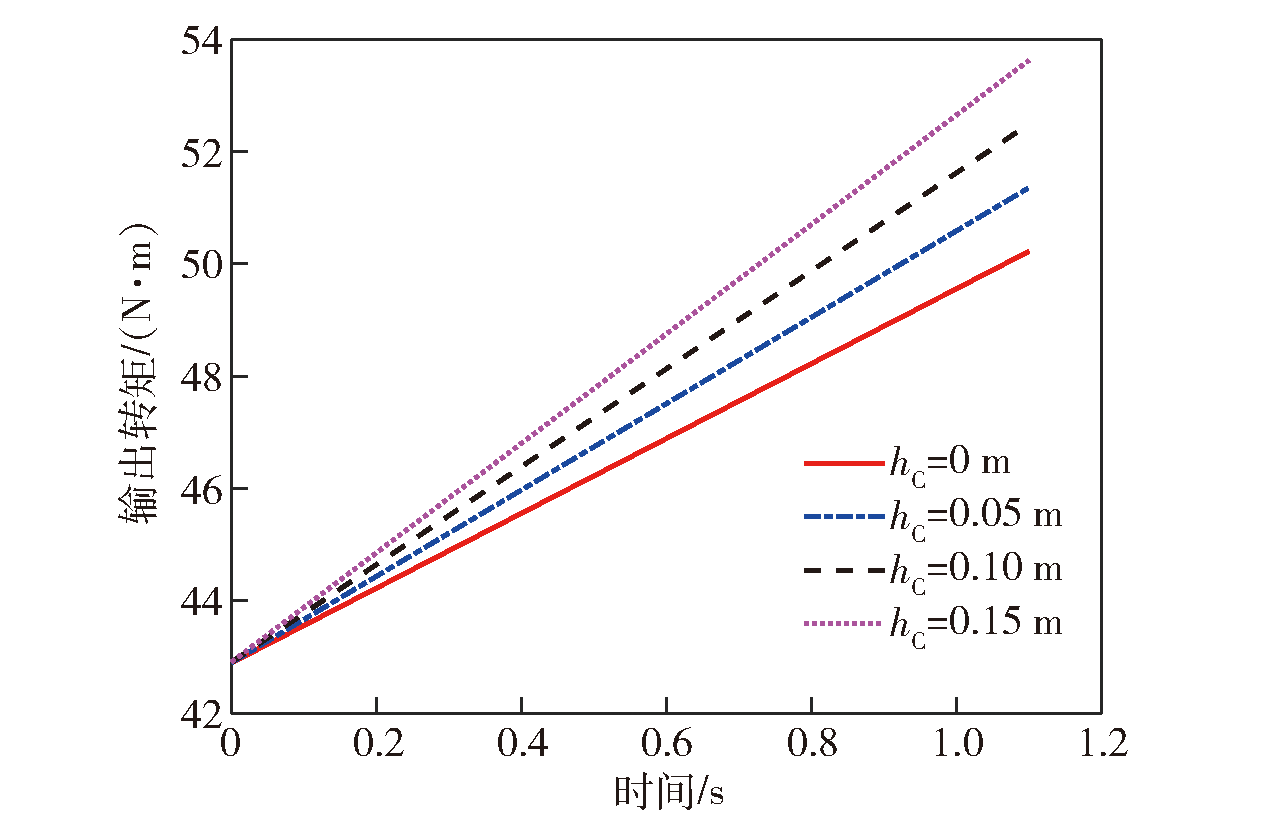
Fig.17 Effect of height of the center of gravity on output torques of rear wheel
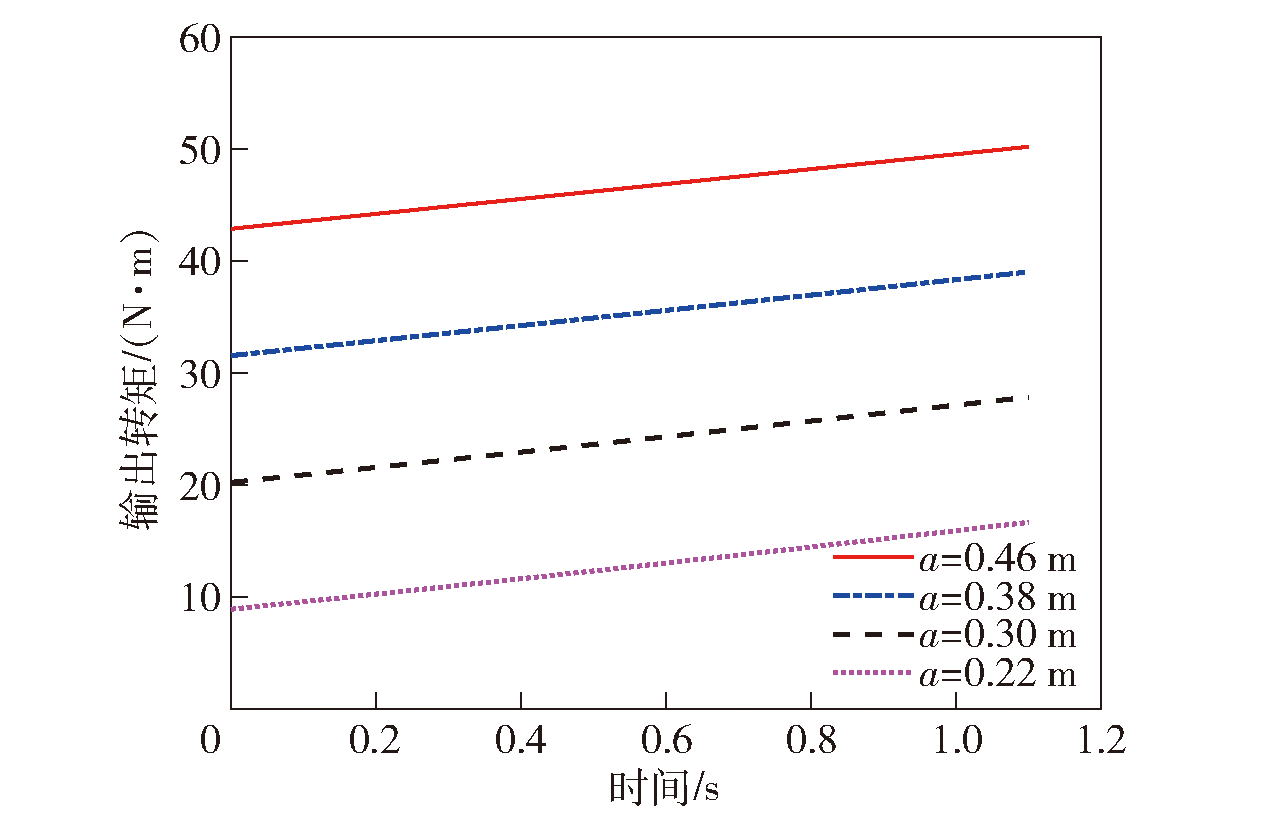
Fig.18 Effect of horizontal position of the center of gravity on output torques of rear wheel

Fig.19 Simulation of roboto bstacle-surmounting
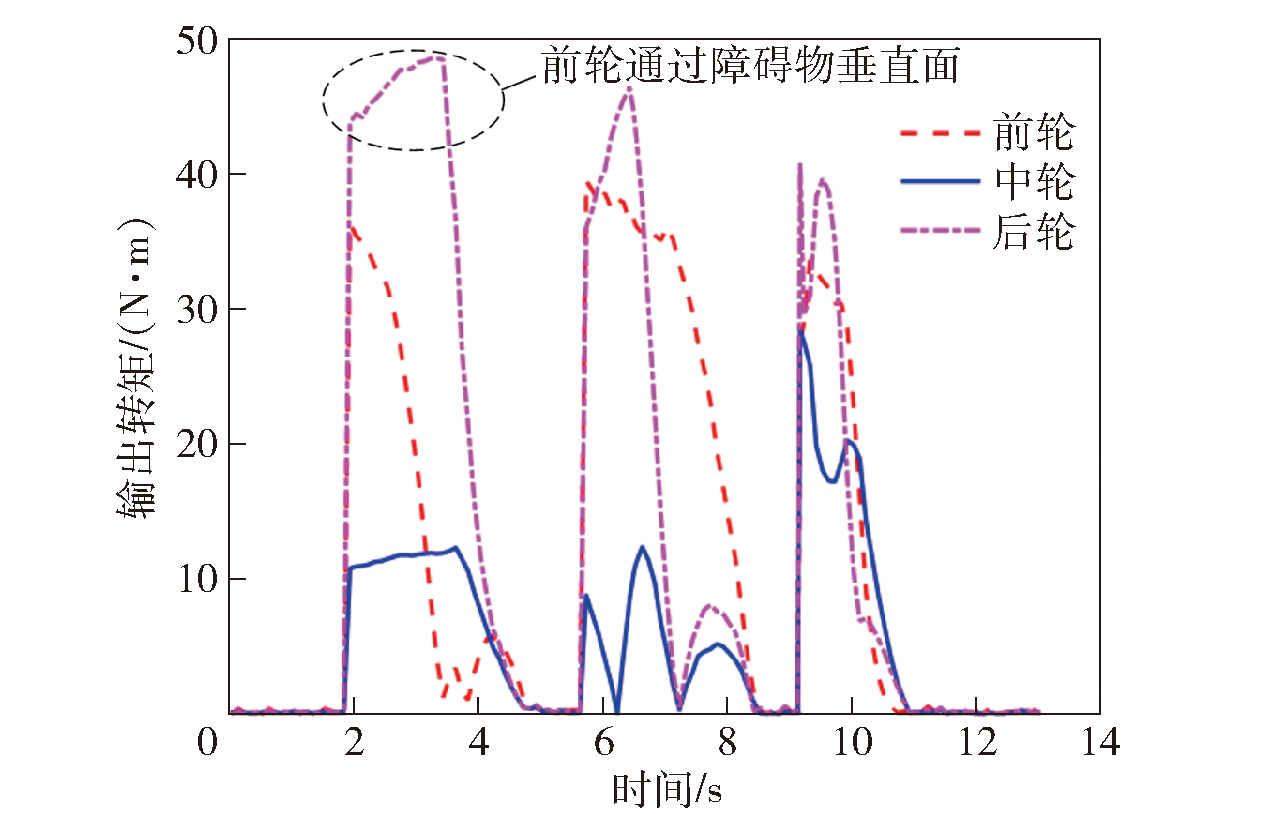
Fig.20 Driving moment curve of obstacle-surmounting
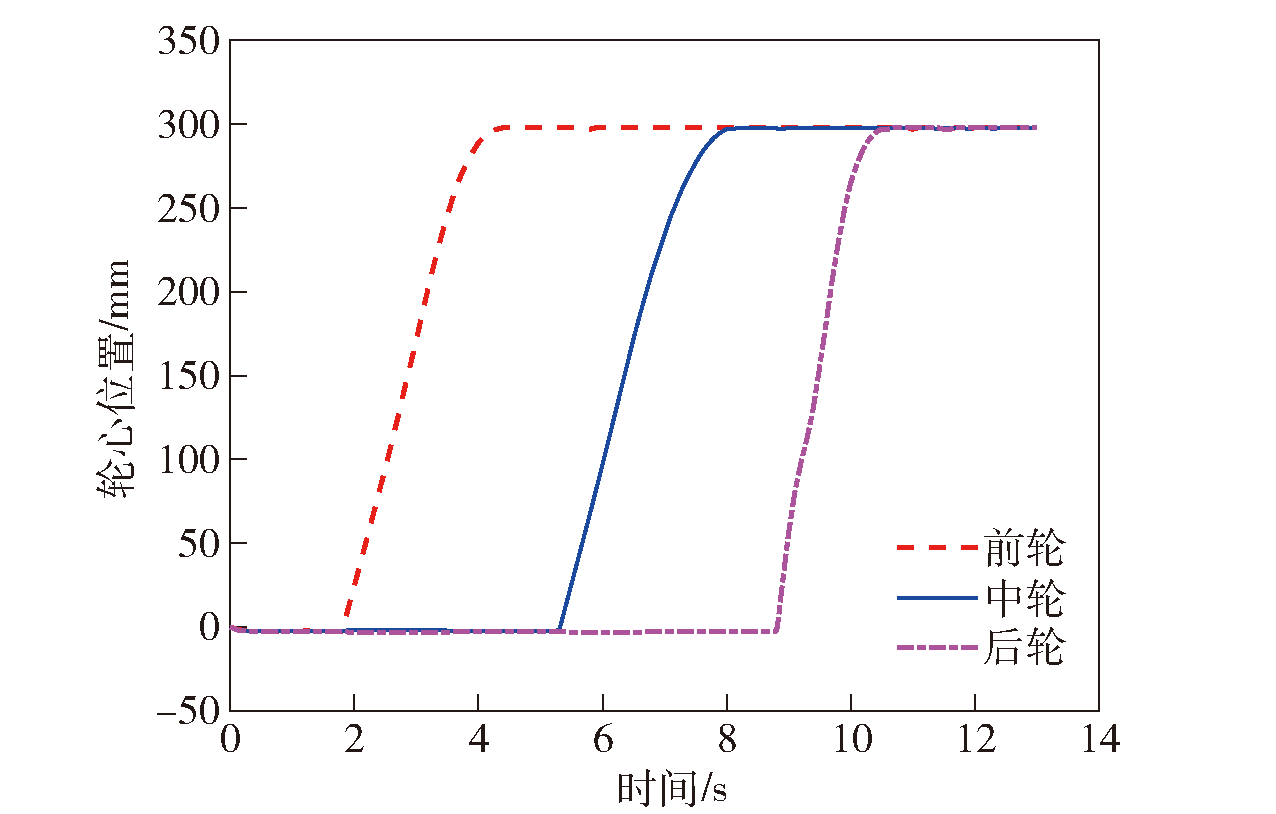
Fig.21 Curves of wheel center position
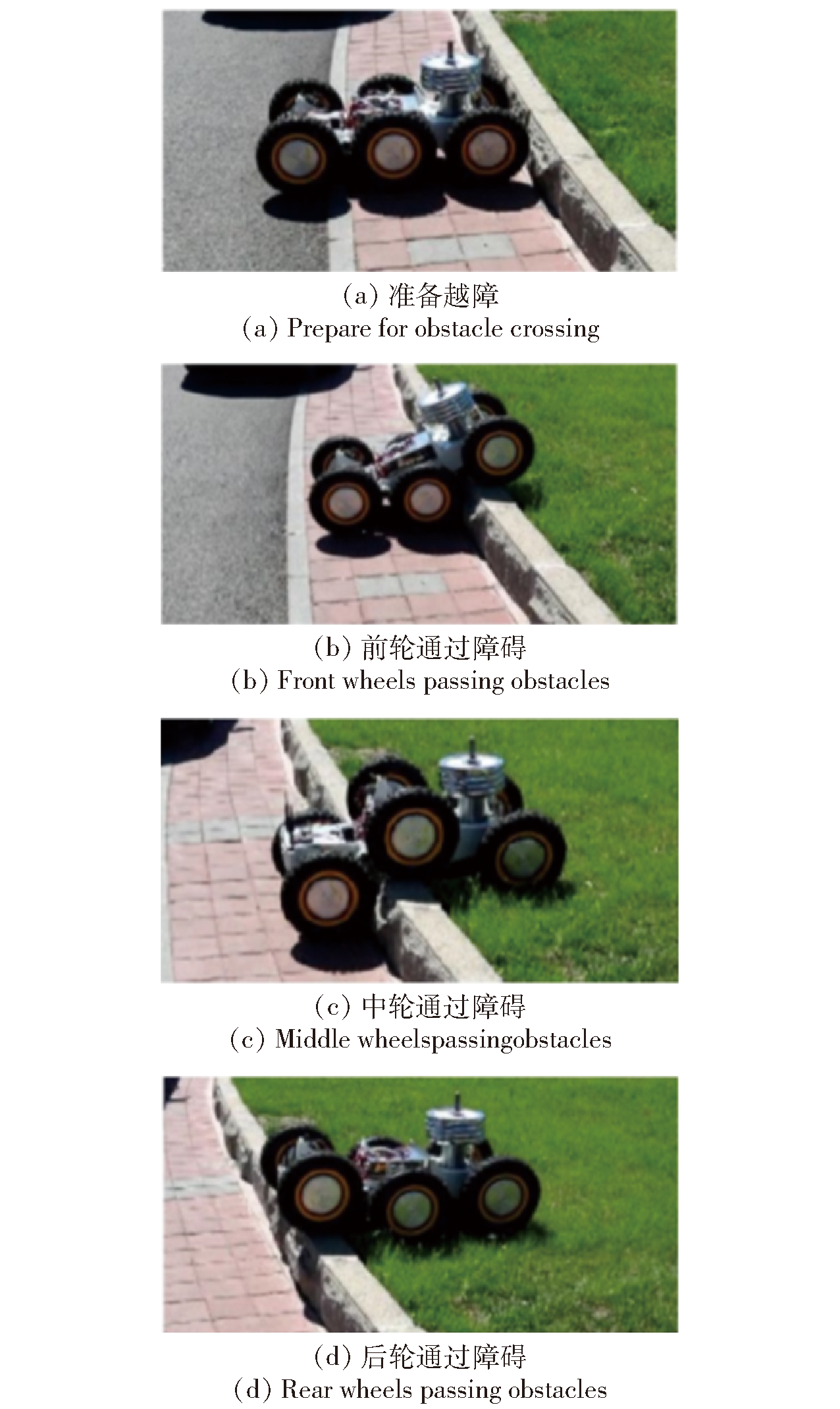
Fig.22 Experiment of robot passing 300mm height obstacle
| 垂直高度/mm | 现象 | 时间/s | 俯仰角/(゜) |
|---|---|---|---|
| 120 | 快速通过 | 4.72 | 10.86 |
| 180 | 顺利通过 | 6.35 | 16.42 |
| 240 | 颠簸通过 | 8.74 | 22.14 |
| 300 | 明显颠簸缓慢通过 | 9.87 | 29.05 |
| 340 | 不能通过 |
Table 3 Experimental results of obstacle-surmounting
| 垂直高度/mm | 现象 | 时间/s | 俯仰角/(゜) |
|---|---|---|---|
| 120 | 快速通过 | 4.72 | 10.86 |
| 180 | 顺利通过 | 6.35 | 16.42 |
| 240 | 颠簸通过 | 8.74 | 22.14 |
| 300 | 明显颠簸缓慢通过 | 9.87 | 29.05 |
| 340 | 不能通过 |
| 负载/kg | 垂直高度/mm | 现象 | 平均行驶时间/s |
|---|---|---|---|
| 20 | 300 | 顺利通过 | 9.35 |
| 40 | 300 | 顺利通过 | 9.60 |
| 60 | 300 | 顺利通过 | 10.18 |
Table 4 Experimental results of bearing capacity
| 负载/kg | 垂直高度/mm | 现象 | 平均行驶时间/s |
|---|---|---|---|
| 20 | 300 | 顺利通过 | 9.35 |
| 40 | 300 | 顺利通过 | 9.60 |
| 60 | 300 | 顺利通过 | 10.18 |
| [1] |
聂建军, 闫修鹏, 马宗正, 等. 新型弓腰式移动底盘的设计及通过性分析[J]. 吉林大学学报(工学版), 2022, 52(3): 515-524.
|
|
|
|
| [2] |
朱华, 由韶泽. 新型煤矿救援机器人研发与试验[J]. 煤炭学报, 2020, 45(6):2170-2181.
|
|
|
|
| [3] |
李所军, 高海波, 邓宗全, 等. 摇臂探测车折叠式悬架的综合评价与设计分析[J]. 宇航学报, 2010, 31(5): 1468-1474.
|
|
|
|
| [4] |
张硕, 姚建涛, 许允斗, 等. 形态可重构移动机器人行走机构设计与分析[J]. 农业机械学报, 2019, 50(8): 418-426.
|
|
|
|
| [5] |
马金猛, 李小凡, 姚辰, 等. 地面移动机器人越障动力学建模与分析[J]. 机器人, 2008, 30(3): 273-278.
|
|
|
|
| [6] |
doi: 10.1016/j.ymssp.2019.07.015 URL |
| [7] |
doi: 10.3390/s21051618 URL |
| [8] |
韩子勇, 苑士华, 裴伟亚, 等. 摇臂悬挂机动平台运动姿态调节最优控制研究[J]. 兵工学报, 2019, 40(11): 2184-2194.
doi: 10.3969/j.issn.1000-1093.2019.11.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.11.002 |
|
| [9] |
|
| [10] |
姜勇. 深海复合轮式采矿机器人越障性能研究[J]. 机器人, 2012, 34(2): 137-143.
doi: 10.3724/SP.J.1218.2012.00137 |
|
doi: 10.3724/SP.J.1218.2012.00137 |
|
| [11] |
贺继林, 任常吉, 吴钪, 等. 八轮四摆臂无人机动平台越障性能分析与试验[J]. 农业机械学报, 2019, 50(1):367-373.
|
|
|
|
| [12] |
刘本勇, 高峰, 姜惠, 等. 平衡摇臂式移动机器人姿态控制算法[J]. 北京航空航天大学学报, 2018, 44(2):391-398.
|
|
|
|
| [13] |
杨武林, 张静, 张俊俊. 具有被动摆臂的八轮机器人结构设计与仿真分析[J]. 机械传动, 2020, 44(3): 72-76.
doi: 10.16578/j.issn.1004.2539.2020.03.012 |
|
doi: 10.16578/j.issn.1004.2539.2020.03.012 |
|
| [14] |
田海波, 方宗德, 古玉锋. 轮腿式机器人越障动力学建模与影响因素分析[J]. 机器人, 2010, 32(3): 390-397.
|
|
doi: 10.3724/SP.J.1218.2010.00390 URL |
|
| [15] |
张超凡. 轮腿式无人运载平台垂直越障性能研究[D]. 长春: 吉林大学, 2020:21-38.
|
|
|
|
| [16] |
doi: 10.1109/TMECH.2016.2520085 URL |
| [17] |
doi: 10.5194/ms-12-1115-2021 URL |
| [18] |
曲梦可, 王洪波, 荣誉. 轮腿混合机器人机械腿动力学建模与驱动预估[J]. 兵工学报, 2017, 38(8): 1619-1629.
doi: 10.3969/j.issn.1000-1093.2017.08.021 |
|
|
|
| [19] |
|
| [20] |
王奉晨. 全地形轮式移动机器人设计与性能分析[D]. 成都: 西南交通大学, 2018: 39-45.
|
|
|
|
| [21] |
doi: 10.1109/LRA.2022.3188120 URL |
| [1] | LIANG Fuwen, MIAO Long, TIAN Feng, SONG Jiahui, BAI Song, HE Zihao, WANG Ningfei. Effect of Friction on Deployment Dynamics of Non-conductive Space Tether [J]. Acta Armamentarii, 2024, 45(4): 1158-1167. |
| [2] | WANG Yiming, WANG Hengdi, CUI Yongcun, LI Chang, DENG Sier. Thermal Characteristics of Large Span Double Row Tapered Roller Bearing [J]. Acta Armamentarii, 2024, 45(4): 1285-1296. |
| [3] | WANG Erlie, WANG Shuai, PI Dawei, WANG Hongliang, WANG Xianhui, XIE Boyuan. Energy Consumption Modeling for a Heavy-duty Purely Electric-powered Vehicle [J]. Acta Armamentarii, 2024, 45(4): 1229-1236. |
| [4] | WANG Yuchen, WANG Wei, LI Ning, ZHU Zejun, SHI Zhongjiao. A Control Method for Roll Stabilization of Guided Missile with Large Angle of Attack [J]. Acta Armamentarii, 2024, 45(3): 774-788. |
| [5] | XIAO Wangang, ZHOU Yunbo, FU Yaoyu, ZHANG Ming, ZHOU Jun, GE Jitao. Analysis of the Influence of Soil on the Maneuverability of Military Off-road Vehicles [J]. Acta Armamentarii, 2024, 45(1): 288-298. |
| [6] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [7] | JU Shuang, WANG Jing, WANG Hao, ZHOU Meng. Formation Reconfiguration Control of Multiple Mobile Robots with Severe Actuator Faults Based on GWO-WOA [J]. Acta Armamentarii, 2023, 44(S2): 114-125. |
| [8] | SU Bo, JIANG Lei, LIU Yufei, XING Boyang, LI Yongyao, TAN Senqi, WANG Zhirui. A Review of Key Technologies for Cross-domain and Trans-medium of Mobile Robotics [J]. Acta Armamentarii, 2023, 44(9): 2556-2567. |
| [9] | LI Dongyang, CHANG Sijiang, WANG Zhongyuan. Nonlinear Region of Attraction Estimation for Projectile’s Angular Motion [J]. Acta Armamentarii, 2023, 44(8): 2329-2341. |
| [10] | DU Wanshan, ZHOU Zhou, BAI Yu, ZHANG Zhilin, WANG Keilei. Study on Multibody Dynamics Modeling and Flight Dynamic Characteristics of Combined Aircraft [J]. Acta Armamentarii, 2023, 44(8): 2245-2262. |
| [11] | GUO Qing, LUO Kai, GENG Shaohang, QIN Kan. Numerical Study of Condensation Heat Transfer of Steam with Non-condensable Gas [J]. Acta Armamentarii, 2023, 44(7): 2080-2091. |
| [12] | LI Zhanlong, ZHANG Zheng, JIANG Wenwen, LIU Qi, REN Zhizhao, WANG Yao, SONG Yong. Dynamic Characteristics of Quasi-Zero Stiffness Vibration Isolation System with Magnetic Rings [J]. Acta Armamentarii, 2023, 44(6): 1784-1794. |
| [13] | WANG Jirui, WANG Chengxin, WANG Yini, TANG Kui, BO Qile. Equivalent Strength of Armour Steel against High-velocity Penetration of Long-rod Projectile [J]. Acta Armamentarii, 2023, 44(12): 3755-3770. |
| [14] | CHEN Jianwei, YU Chuanqiang, LIU Zhihao, TANG Shengjin, ZHANG Zhihao, SHU Hongbin. Data Modeling of Multi-Axle Special Vehicles and Lateral Dynamics Applications [J]. Acta Armamentarii, 2023, 44(1): 165-175. |
| [15] | JIANG Yi, WANG Ting, SHAO Peiyao, XU Yao, SHAO Shiliang. Gait Study and Obstacle-Surmounting Performance Analysis of a Wheel-Leg Hybrid Robot [J]. Acta Armamentarii, 2023, 44(1): 247-259. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||