
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (S2): 223-234.doi: 10.12382/bgxb.2023.0664
所属专题: 群体协同与自主技术
• • 上一篇
张继雄1,2, 李宗刚1,2,*( ), 宁小刚1,2, 陈引娟1,2
), 宁小刚1,2, 陈引娟1,2
收稿日期:2023-07-15
上线日期:2024-01-10
通讯作者:
基金资助:
ZHANG Jixiong1,2, LI Zonggang1,2,*(), NING Xiaogang1,2, CHEN Yinjuan1,2
Received:2023-07-15
Online:2024-01-10
摘要:
针对事件触发下一般线性多智能体系统一致性问题研究中,现有算法多采用静态触发方式、一致性协议设计中存在全局信息、无法实现完全分布式控制的问题,提出一种基于动态事件触发的一致性协议。通过引入时变耦合权重自适应地调整图的标量增益,实现一致性问题的完全分布式求解。针对事件触发控制中需要持续检测触发条件的问题,引入基于个体的状态估计器,用于在触发间隔期内对自身状态进行估计,减少了智能体间的通信次数。基于所选择的Lyapunov函数,设计一种耦合系统状态估计值、测量误差和自适应参数的动态触发函数,显著地减少了系统的触发次数、降低了系统的能耗。数值计算表明所提一致性协议能够实现渐近一致性,且不发生Zeno行为。仿真结果表明所提协议能有效降低系统能耗、节省通信资源。
中图分类号:
张继雄, 李宗刚, 宁小刚, 陈引娟. 动态事件触发下一般线性多智能体系统完全分布式一致性控制[J]. 兵工学报, 2023, 44(S2): 223-234.
ZHANG Jixiong, LI Zonggang, NING Xiaogang, CHEN Yinjuan. Fully Distributed Consensus Control of General Linear Multi-agent System Based on Dynamic Event-trigger[J]. Acta Armamentarii, 2023, 44(S2): 223-234.
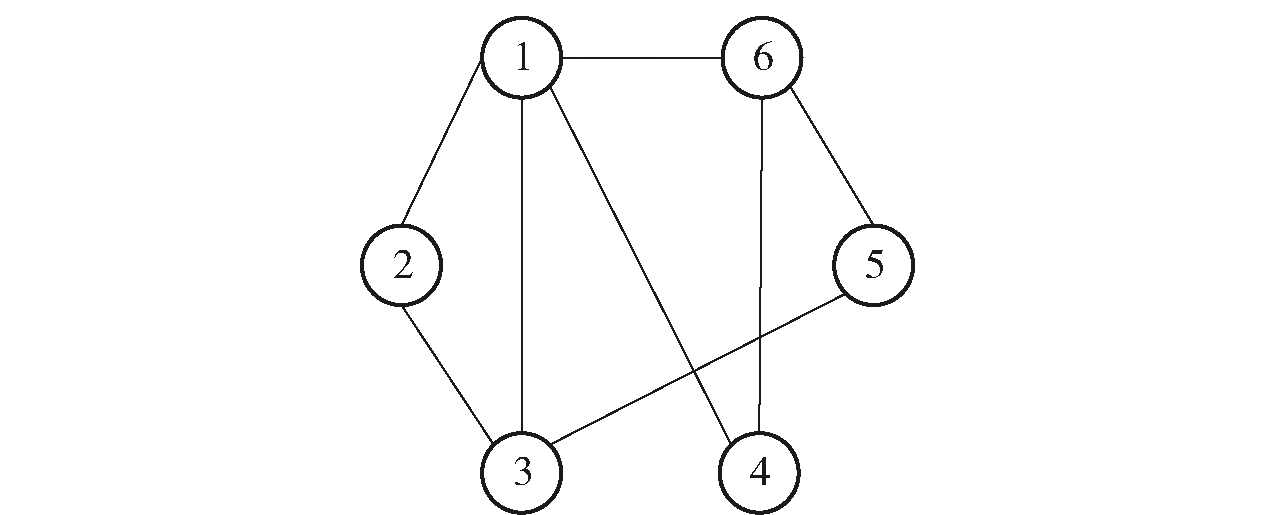
图1 智能体间无向通信拓扑
Fig.1 Undirected communication topology among agents
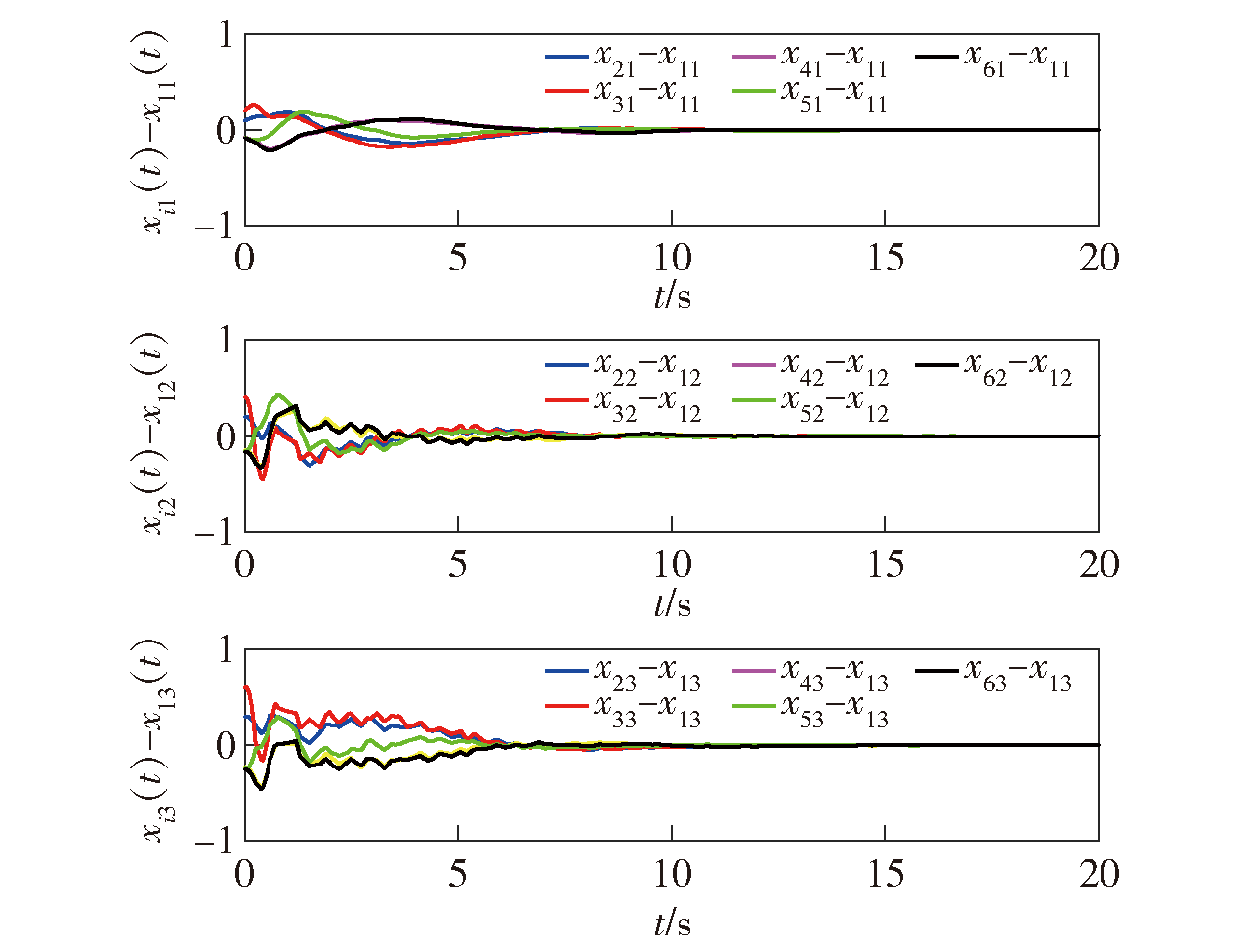
图2 一致性误差
Fig.2 Consensus error

图3 时变耦合权重
Fig.3 Time-varying coupling weight
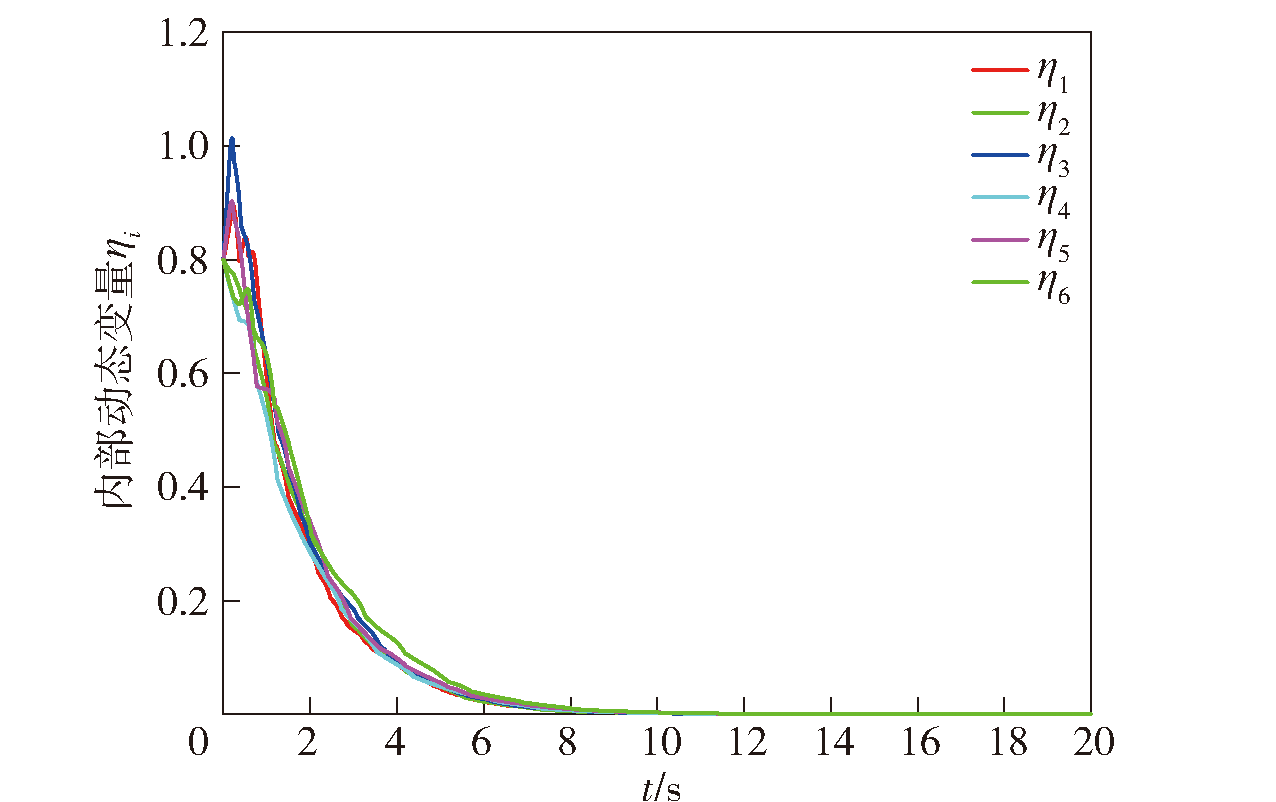
图4 内部动态变量
Fig.4 Internal dynamic variables
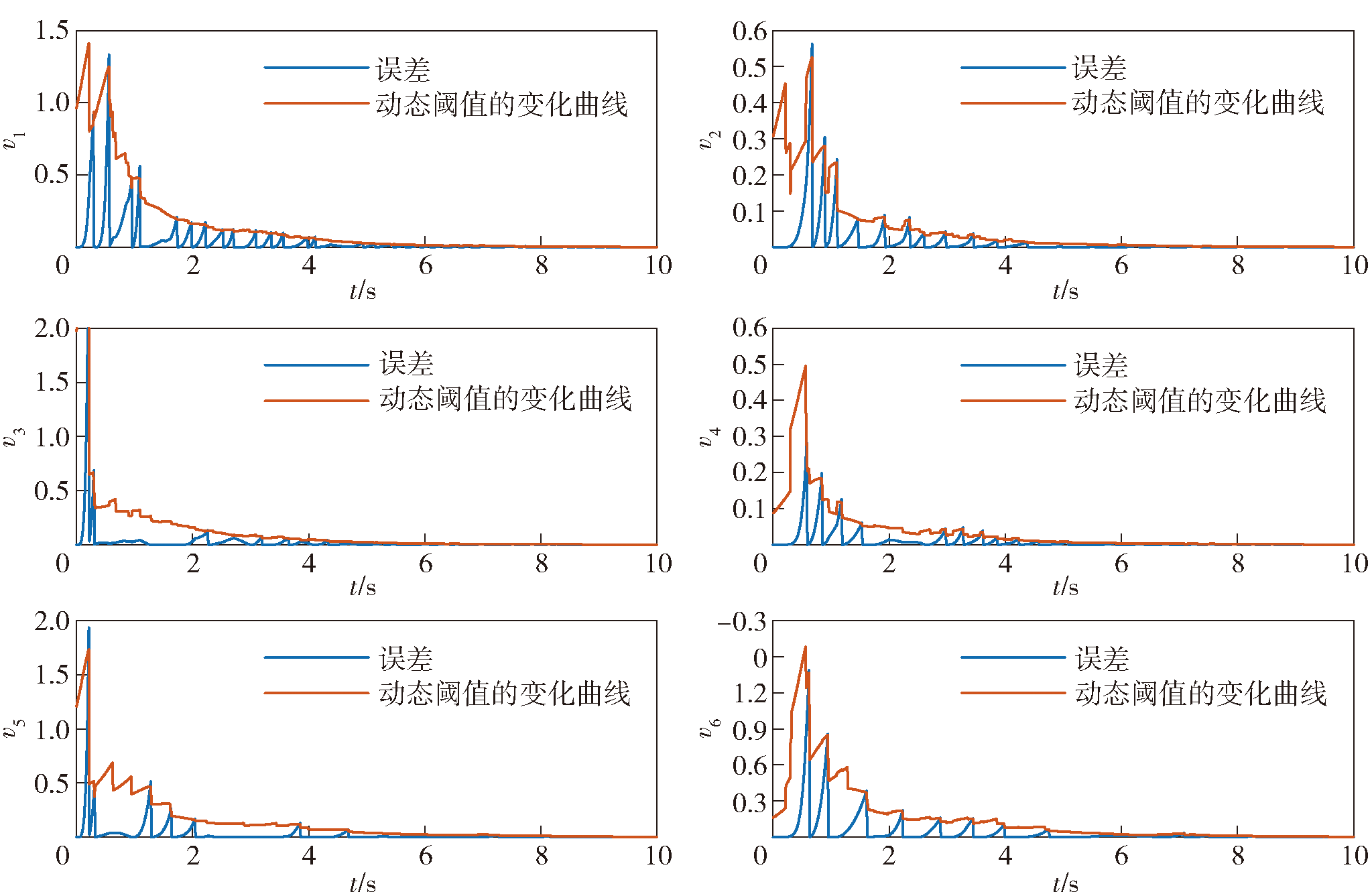
图5 智能体vi误差和动态触发阈值的变化曲线
Fig.5 Curves of error and dynamic trigger threshold
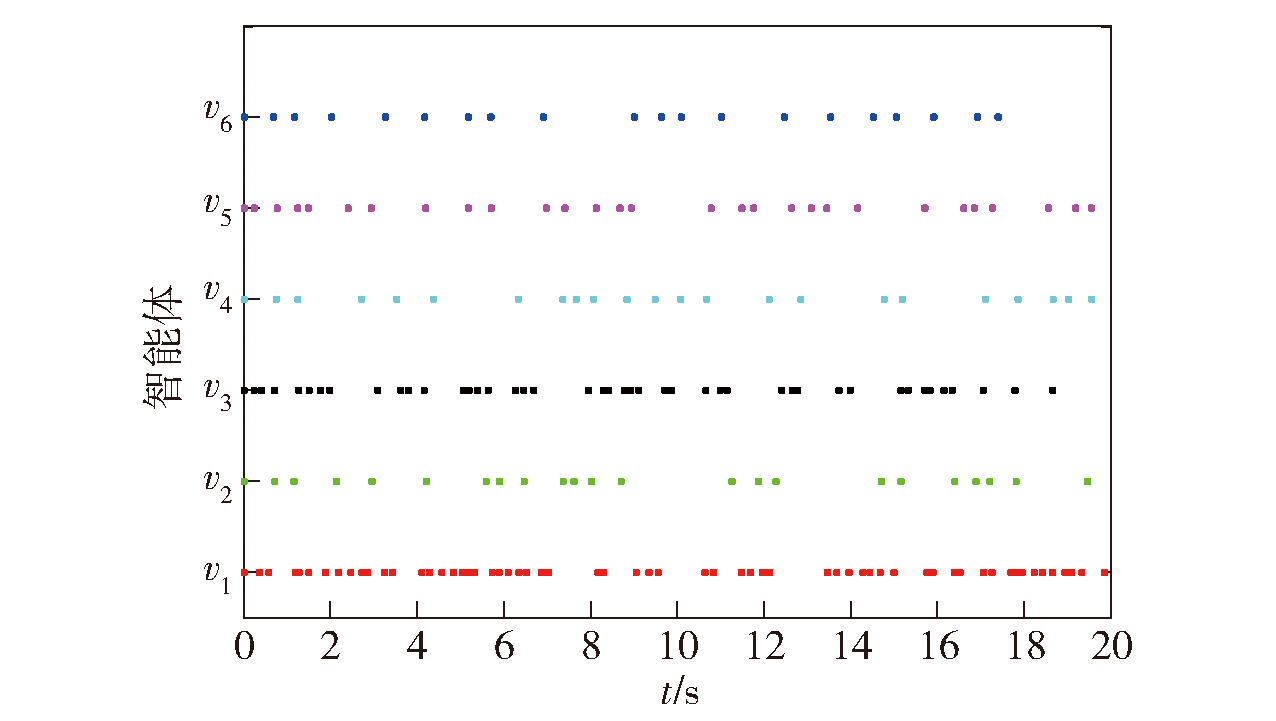
图6 动态事件触发机制下各智能体的触发时刻
Fig.6 Trigger-time of each agent under dynamic event-triggered mechanism
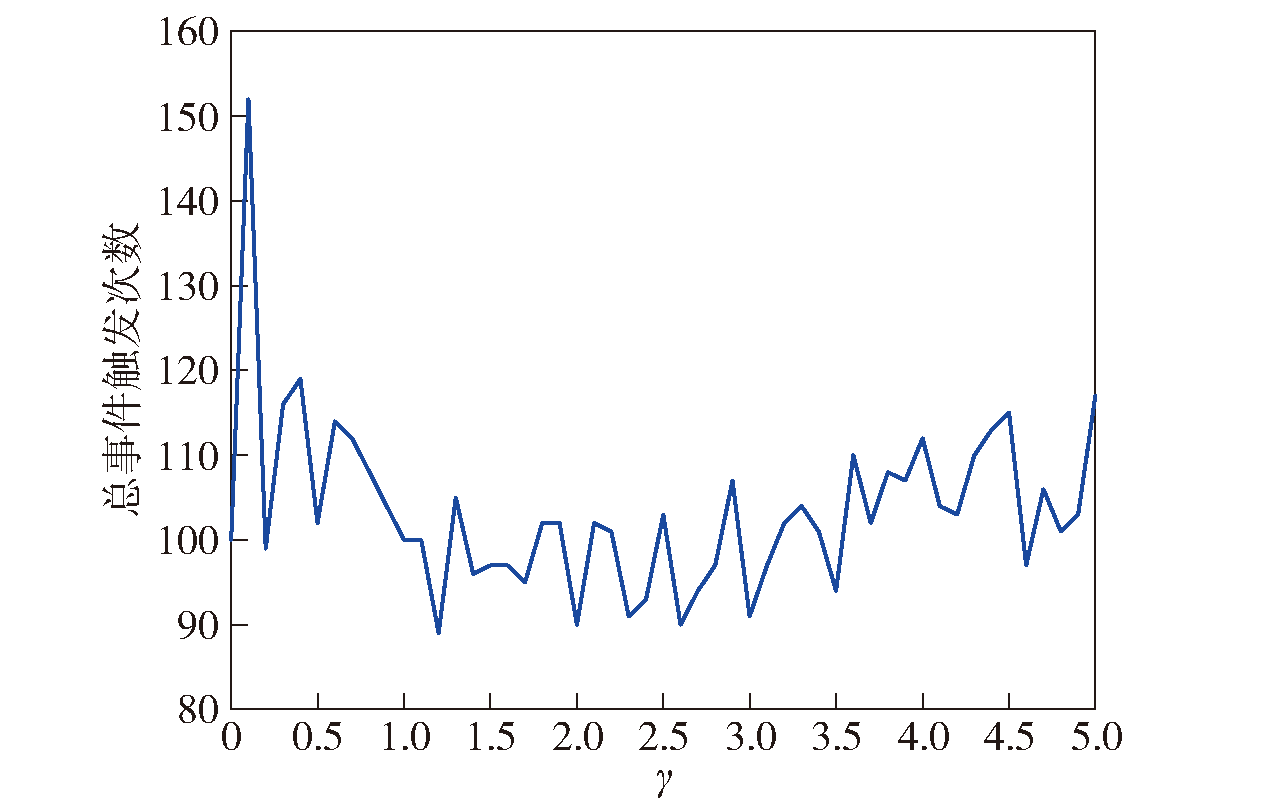
图7 总事件触发次数随参数γ的变化曲线
Fig.7 Total event trigger times vs. parameter γ
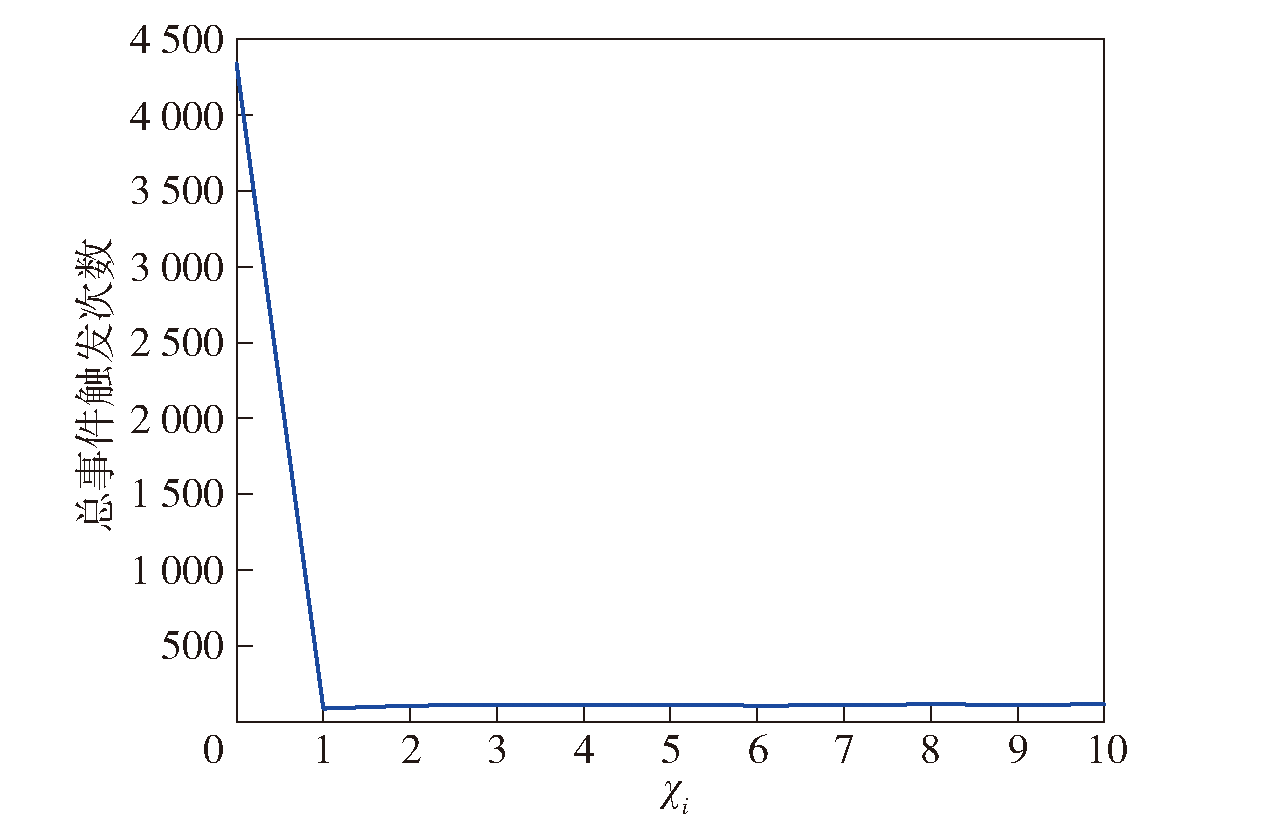
图8 总事件触发次数随参数χi的变化曲线
Fig.8 Total event trigger times vs. parameter χi
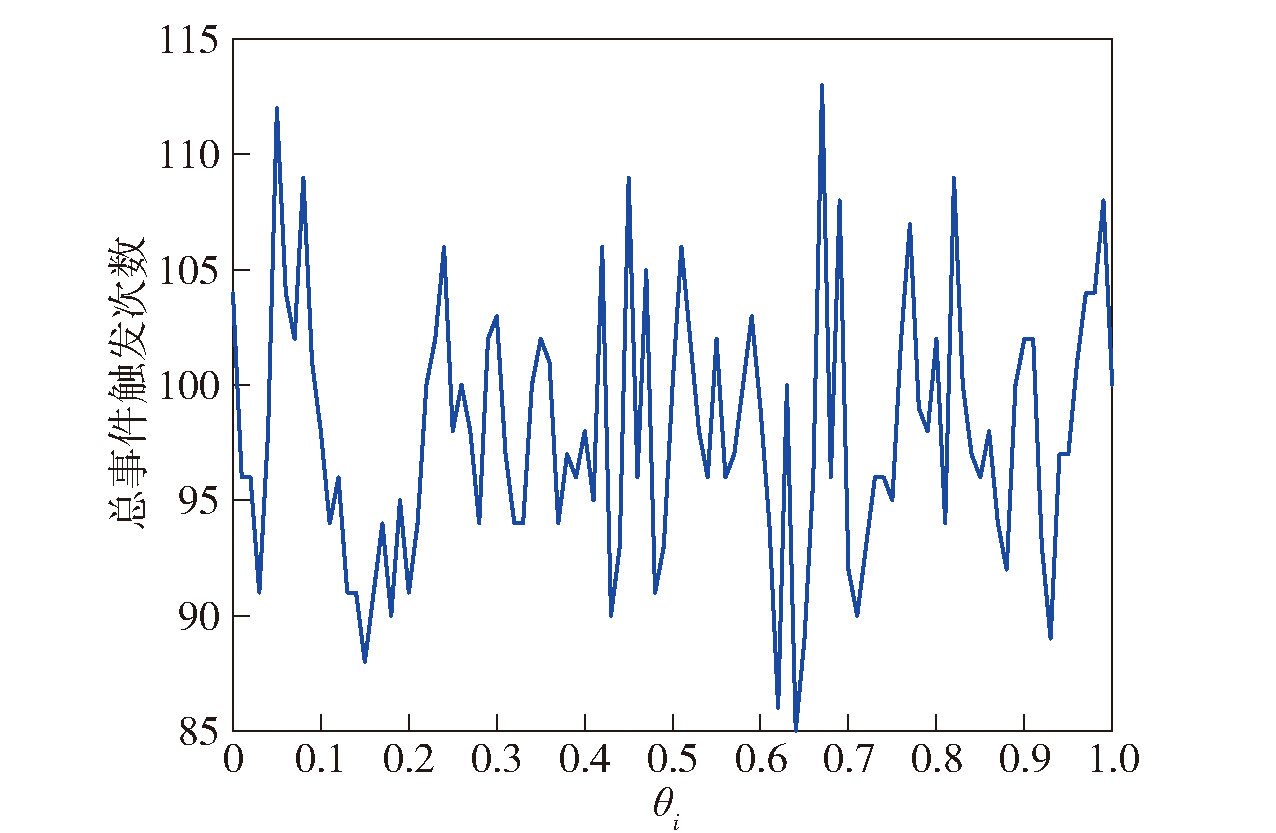
图9 总事件触发次数随参数θi的变化曲线
Fig.9 Total event trigger times vs. parameter θi
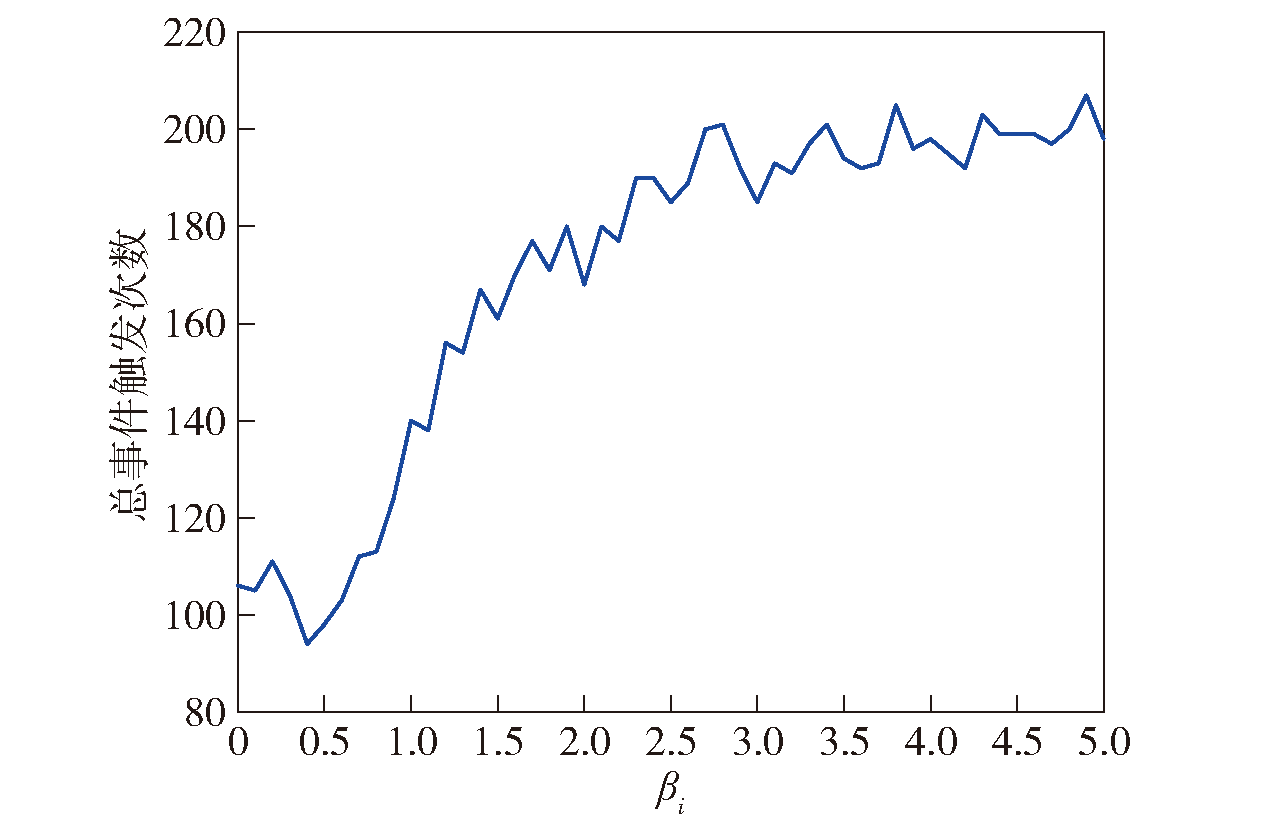
图10 总事件触发次数随参数βi的变化曲线
Fig.10 Total event trigger times vs. parameter βi

图11 总事件触发次数随内部动态变量的初值 ηi(0)的变化曲线
Fig.11 Changing curve of the total number of event triggers with the initial value of internal dynamic variable ηi(0)
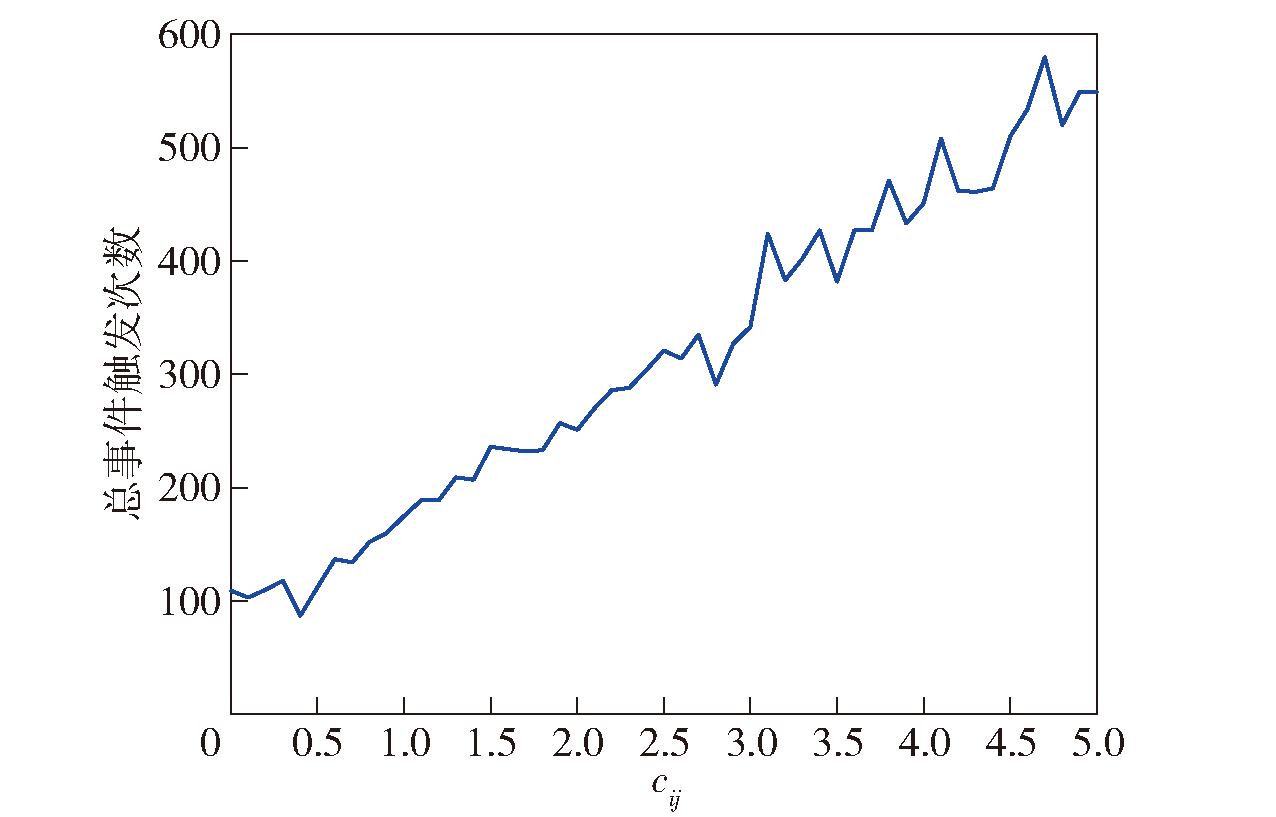
图12 总事件触发次数随自适应参数初值cij(0)的变化曲线
Fig.12 Changing curve of the total number of event triggers with the initial value of adaptive parameter cij(0)
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18] | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 文献[21] | 81 | 153 | 238 | 177 | 91 | 102 | 842 |
| 文献[22] | 99 | 54 | 124 | 58 | 45 | 63 | 443 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
表1 触发次数对比
Table 1 Comparison of trigger times
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18] | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 文献[21] | 81 | 153 | 238 | 177 | 91 | 102 | 842 |
| 文献[22] | 99 | 54 | 124 | 58 | 45 | 63 | 443 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
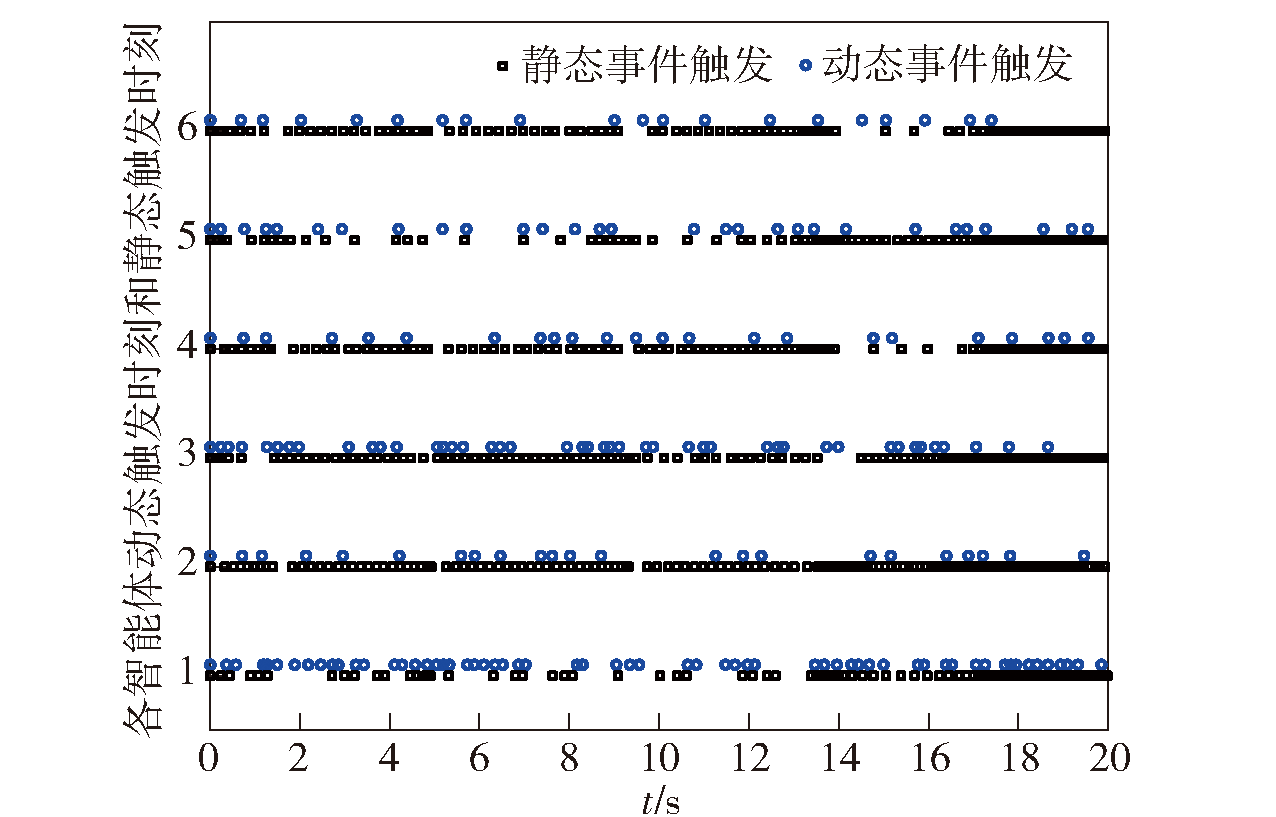
图13 动态和静态触发机制下各智能体的触发时刻
Fig.13 Trigger-time of each agent under dynamic and static trigger mechanisms
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18]ETC | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
表2 通信次数对比
Table 2 omparison of communication times
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18]ETC | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
| [1] |
于镝, 王亚洁, 赵博, 等. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5):1403-1413.
|
|
doi: 10.12382/bgxb.2022.1267 |
|
| [2] |
张栋, 马苏慧, 吕石, 等. 多智能体系统事件触发一致性研究综述[J]. 北京理工大学学报, 2022, 42(10):1059-1072.
|
|
|
|
| [3] |
|
| [4] |
doi: 10.1016/S1474-6670(17)56852-4 URL |
| [5] |
doi: 10.1109/TCYB.6221036 URL |
| [6] |
doi: 10.1109/TAC.1959.1104845 URL |
| [7] |
doi: 10.1016/j.ins.2018.12.037 URL |
| [8] |
|
| [9] |
doi: 10.1109/TAC.9 URL |
| [10] |
doi: 10.1177/01423312221138887 URL |
| [11] |
doi: 10.1016/j.patrec.2023.08.015 URL |
| [12] |
doi: 10.1016/j.automatica.2012.11.010 URL |
| [13] |
doi: 10.1109/TAC.2017.2693824 URL |
| [14] |
doi: 10.1016/j.automatica.2023.111248 URL |
| [15] |
doi: 10.1016/j.ins.2023.119629 URL |
| [16] |
doi: 10.1016/j.automatica.2013.01.029 URL |
| [17] |
doi: 10.1016/j.automatica.2016.03.003 URL |
| [18] |
doi: 10.1109/TAC.9 URL |
| [19] |
doi: 10.1016/j.automatica.2022.110188 URL |
| [20] |
doi: 10.1177/01423312231156665 URL |
| [21] |
doi: 10.1109/TCYB.6221036 URL |
| [22] |
doi: 10.1002/asjc.v24.3 URL |
| [23] |
doi: 10.1109/TAC.2012.2220443 URL |
| [24] |
doi: 10.1016/j.jfranklin.2022.10.045 URL |
| [25] |
doi: 10.1177/01423312221147948 URL |
| [26] |
doi: 10.1109/LCSYS.2022.3172791 URL |
| [27] |
doi: 10.1016/j.oceaneng.2022.113422 URL |
| [28] |
doi: 10.1109/TAC.9 URL |
| [29] |
doi: 10.1016/j.jfranklin.2022.05.022 URL |
| [30] |
doi: 10.1016/j.automatica.2022.110188 URL |
| [31] |
邓甲, 王付永, 刘忠信, 等. 动态事件触发机制下二阶多智能体系统完全分布式控制[J/OL]. 控制理论与应用, 2023(2023-10-17)[2023-11-26]. http://kns.cnki.net/kcms/detail/44.1240.TP.20230106.1723.01.html.
|
|
|
|
| [32] |
doi: 10.1109/TCYB.2020.2981210 URL |
| [1] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [2] | 于镝, 王亚洁, 赵博, 刘琼. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5): 1403-1413. |
| [3] | 孔国杰, 冯时, 于会龙, 巨志扬, 龚建伟. 无人集群系统协同运动规划技术综述[J]. 兵工学报, 2023, 44(1): 11-26. |
| [4] | 周绍磊, 赵学远, 祁亚辉, 王帅磊. 有向切换拓扑条件下考虑暂态响应的多智能体H∞一致性控制[J]. 兵工学报, 2020, 41(2): 356-365. |
| [5] | 曹昊哲, 吴炎烜, 周峰, 王正杰. 带有避碰机制的2阶非线性多智能体系统包围编队研究[J]. 兵工学报, 2016, 37(9): 1646-1654. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4