
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (10): 3026-3037.doi: 10.12382/bgxb.2022.0430
李辉1,2,*( ), 宁峰平2, 郭辉1, 李瑞琴2
), 宁峰平2, 郭辉1, 李瑞琴2
收稿日期:2022-05-30
上线日期:2023-10-30
通讯作者:
基金资助:
LI Hui1,2,*(), NING Fengping2, GUO Hui1, LI Ruiqin2
Received:2022-05-30
Online:2023-10-30
摘要:
为设计一种结构合理、适宜患者使用的踝关节康复机构,针对踝关节运动特点,提出一种3-PRPS/RRR并联机器人。采用旋量理论描述机器人的数学模型,推导得出该机器人具有3转动自由度;使用闭环矢量法得到机器人的位置逆解方程,利用粒子群优化算法计算机器人的位置正解;设定一组机器人的设计参数,建立由初值不断迭代的数值算法得到机器人的工作空间;推导机器人的雅克比矩阵,计算机器人在其工作空间内的奇异位形;通过生物力学软件建立人体骨肌系统,仿真得到使用该机器人进行踝关节康复训练时踝关节处肌肉的激活程度;搭建试验样机进行试验,验证机器人位置正/逆解、工作空间和奇异位形。研究结果表明:CAD模型和理论计算结果一致,结合试验验证了机器人位置正/逆解的正确性;试验样机的工作空间能够满足踝关节康复训练所需的运动范围,且机器人在其工作空间内不存在奇异位形;使用该机器人进行康复训练时能够有效地激活肌肉,达到康复训练的目的。
中图分类号:
李辉, 宁峰平, 郭辉, 李瑞琴. 3-PRPS/RRR踝关节康复机器人运动机理研究与试验[J]. 兵工学报, 2023, 44(10): 3026-3037.
LI Hui, NING Fengping, GUO Hui, LI Ruiqin. Research and Experiment on the Motion Mechanism of a 3-PRPS/RRR Ankle Rehabilitation Mechanism[J]. Acta Armamentarii, 2023, 44(10): 3026-3037.

图1 踝关节康复机器人模型
Fig.1 Ankle rehabilitation robot model

图2 PSO算法流程图
Fig.2 Flow chart of the PSO algorithm
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| l11/mm | 160 | l23/mm | 60 |
| l12/mm | 147.5 | l4/mm | 265 |
| l13/mm | 147.5 | p1/mm | 156.4641 |
| l21/mm | 60 | p2/mm | 154.7974 |
| l22/mm | 60 | p3/mm | 154.7974 |
表1 机构的设计参数
Table 1 Design parameters of the mechanism
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| l11/mm | 160 | l23/mm | 60 |
| l12/mm | 147.5 | l4/mm | 265 |
| l13/mm | 147.5 | p1/mm | 156.4641 |
| l21/mm | 60 | p2/mm | 154.7974 |
| l22/mm | 60 | p3/mm | 154.7974 |
| 参数 | 数值 |
|---|---|
| D10/mm | [55 0 -89]T |
| D20/mm | [-30 45 -89]T |
| D30/mm | [-30 -45 -89]T |
表2 Di在动坐标系中的初始坐标
Table 2 Initial coordinates of Di in the moving coordinate system
| 参数 | 数值 |
|---|---|
| D10/mm | [55 0 -89]T |
| D20/mm | [-30 45 -89]T |
| D30/mm | [-30 -45 -89]T |
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| c1 | 1.49445 | ωmin | 0.2 |
| c2 | 1.49445 | tmax | 200 |
| ωmax | 0.8 |
表3 PSO算法参数
Table 3 PSO algorithm parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| c1 | 1.49445 | ωmin | 0.2 |
| c2 | 1.49445 | tmax | 200 |
| ωmax | 0.8 |
| 算例 | q1/mm | q2/mm | q3/mm | 卦限 | x/mm | y/mm | z/mm | α/(°) | β/(°) | γ/(°) | F |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 157.4 | 166.5 | 168.9 | 2 | 75.97 | 0.68 | 193.07 | -3.44 | 0.09 | 8.67 | 1.87×10-4 |
| 3 | 53.96 | 12.59 | 176.25 | -13.60 | -13.26 | 12.72 | 1.07×10-11 | ||||
| 2 | 166.5 | 149.5 | 164.8 | 4 | 75.42 | 38.12 | 203.32 | 14.78 | -20.72 | 15.72 | 2×10-6 |
| 8 | 86.73 | 9.84 | 209.42 | 16.07 | -24.12 | -2.44 | 0 | ||||
| 3 | 168.9 | 174.3 | 160.9 | 2 | 27.8 | -13.52 | 165.05 | -10.26 | -17.26 | 4.92 | 1.42×10-14 |
| 3 | 55.66 | 51.38 | 192.83 | 10.89 | -13.48 | 55.53 | 1.11×10-11 |
表4 位置正解算例
Table 4 Examples of forward kinematic solutions
| 算例 | q1/mm | q2/mm | q3/mm | 卦限 | x/mm | y/mm | z/mm | α/(°) | β/(°) | γ/(°) | F |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 157.4 | 166.5 | 168.9 | 2 | 75.97 | 0.68 | 193.07 | -3.44 | 0.09 | 8.67 | 1.87×10-4 |
| 3 | 53.96 | 12.59 | 176.25 | -13.60 | -13.26 | 12.72 | 1.07×10-11 | ||||
| 2 | 166.5 | 149.5 | 164.8 | 4 | 75.42 | 38.12 | 203.32 | 14.78 | -20.72 | 15.72 | 2×10-6 |
| 8 | 86.73 | 9.84 | 209.42 | 16.07 | -24.12 | -2.44 | 0 | ||||
| 3 | 168.9 | 174.3 | 160.9 | 2 | 27.8 | -13.52 | 165.05 | -10.26 | -17.26 | 4.92 | 1.42×10-14 |
| 3 | 55.66 | 51.38 | 192.83 | 10.89 | -13.48 | 55.53 | 1.11×10-11 |
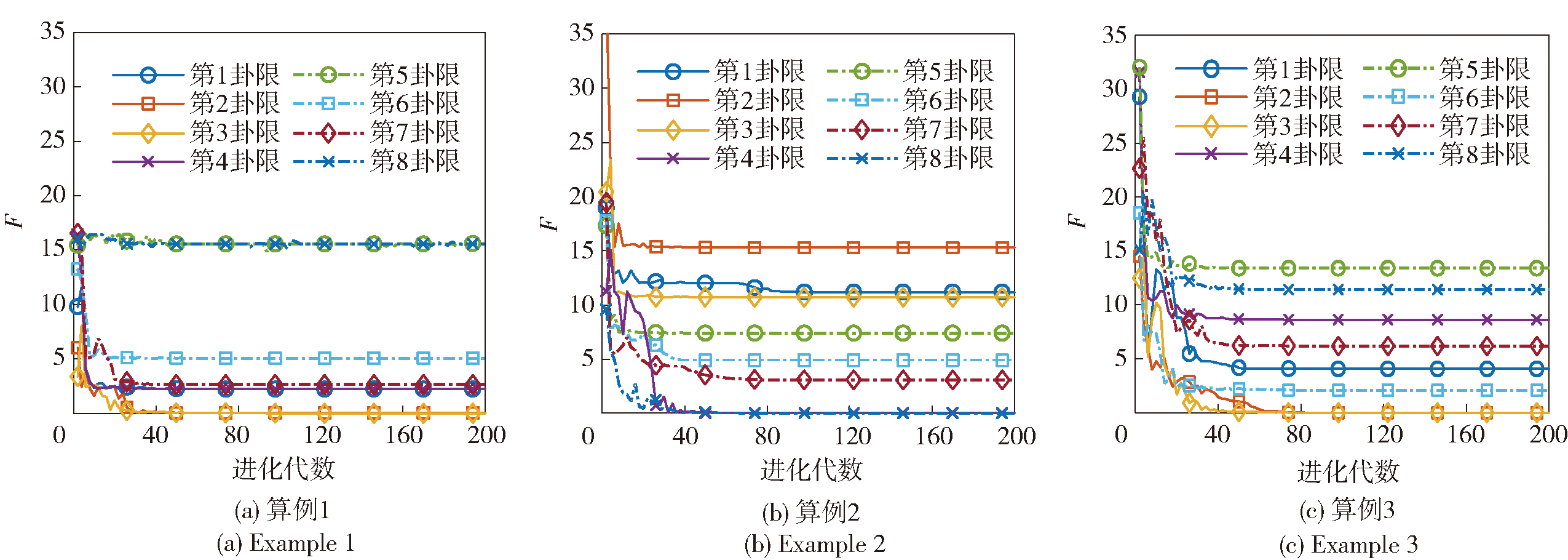
图3 适应度曲线
Fig.3 Fitness curves

图4 算例1的位姿
Fig.4 Poses of example 1
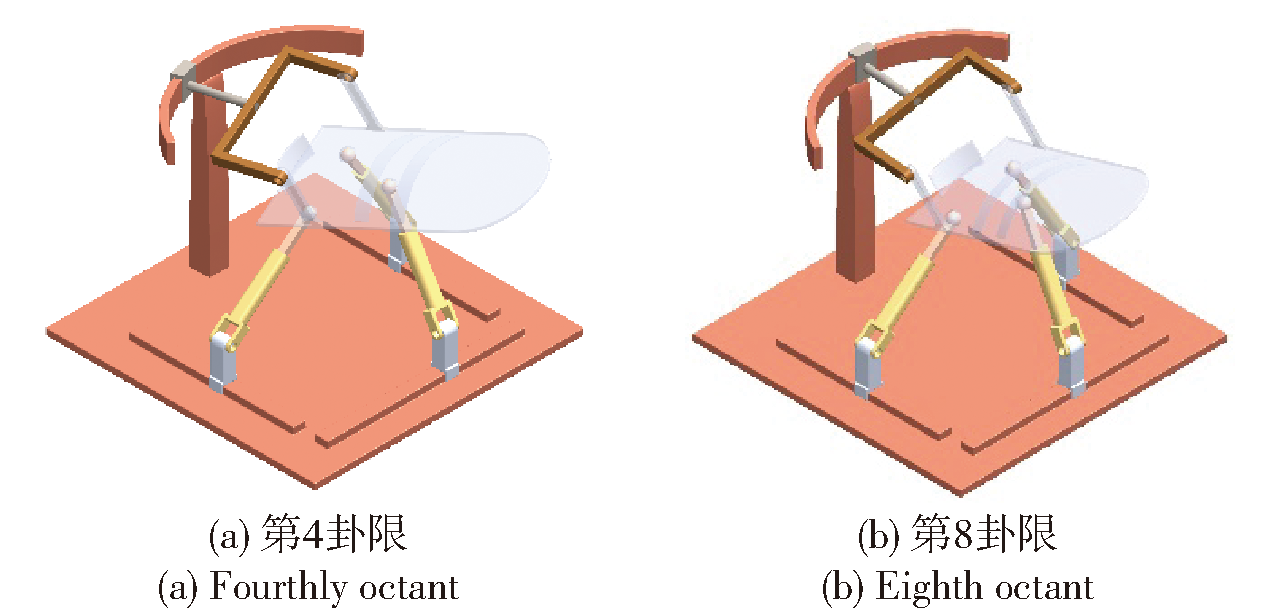
图5 算例2的位姿
Fig.5 Poses of example 2
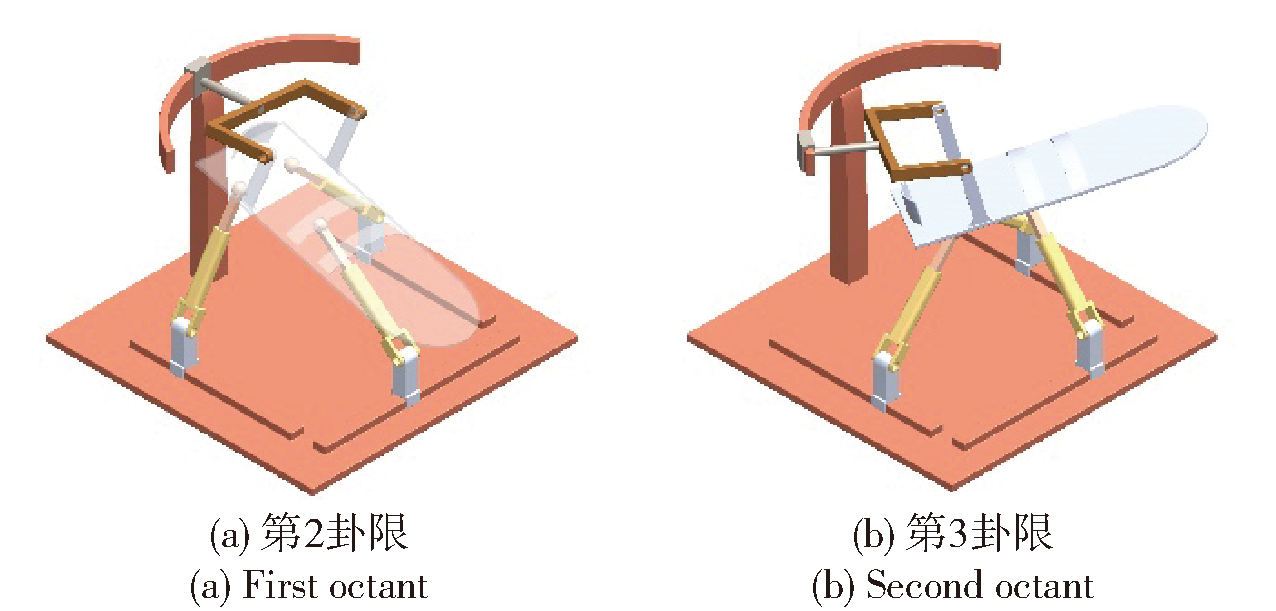
图6 算例3的位姿
Fig.6 Poses of example 3

图7 机构的工作空间
Fig.7 Workspace of the mechanism
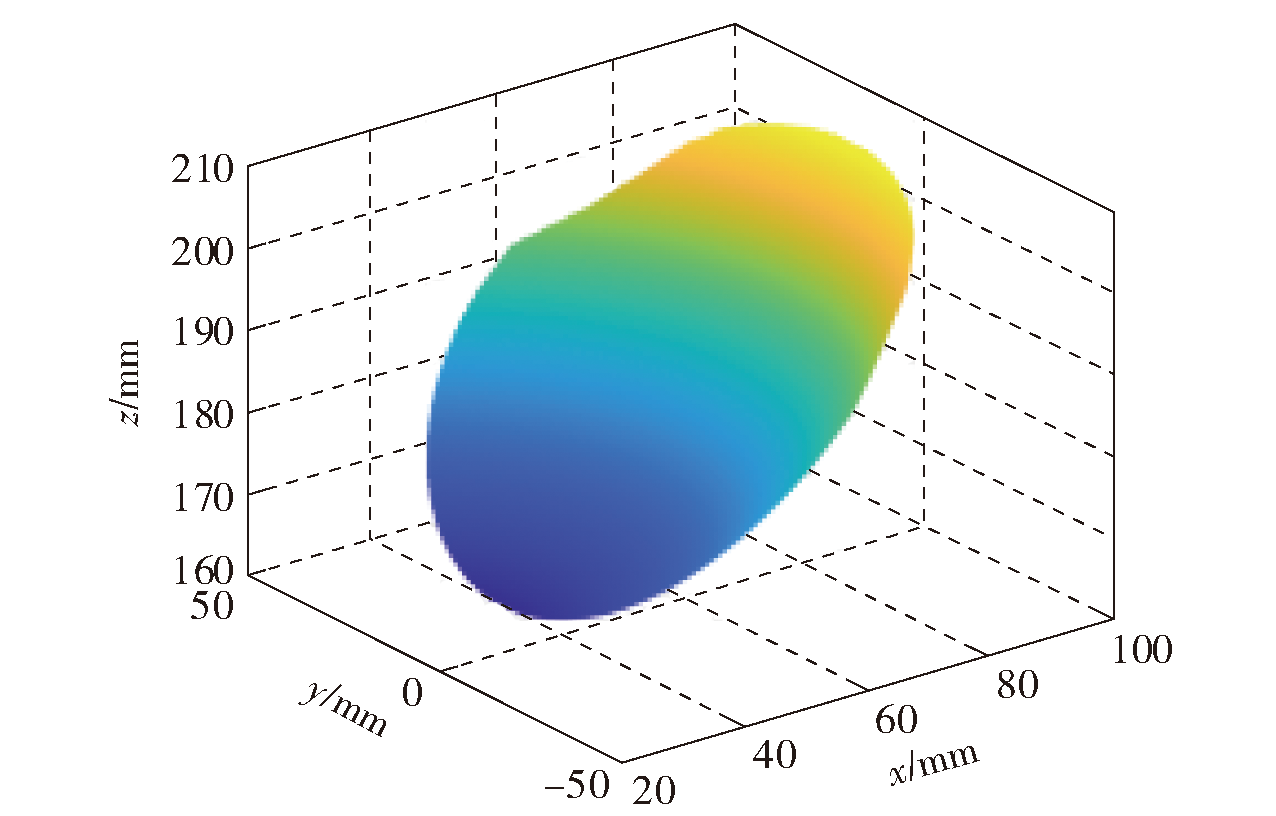
图8 D1的工作空间
Fig.8 Workspace of D1
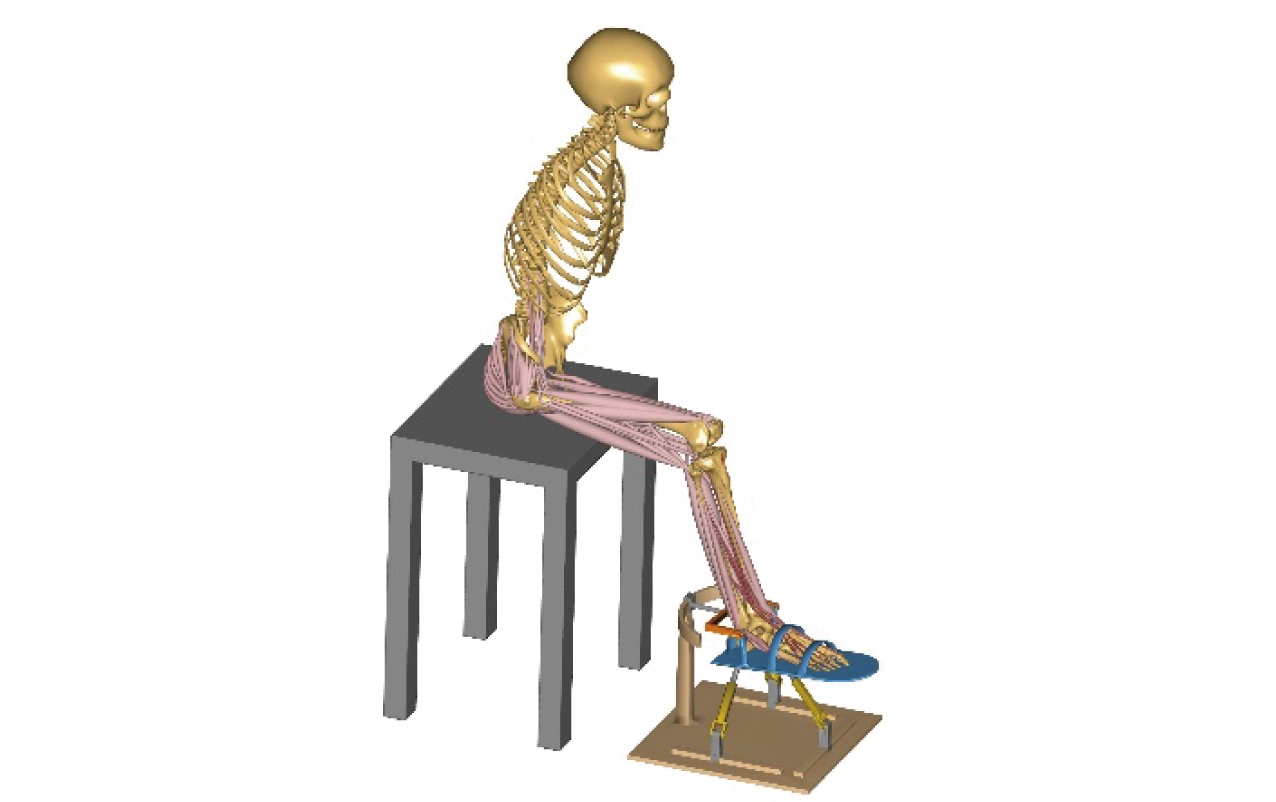
图9 坐姿下踝关节康复机器人-人体骨肌耦合系统
Fig.9 Ankle rehabilitation robot-human musculoskeletal coupling system under sitting posture
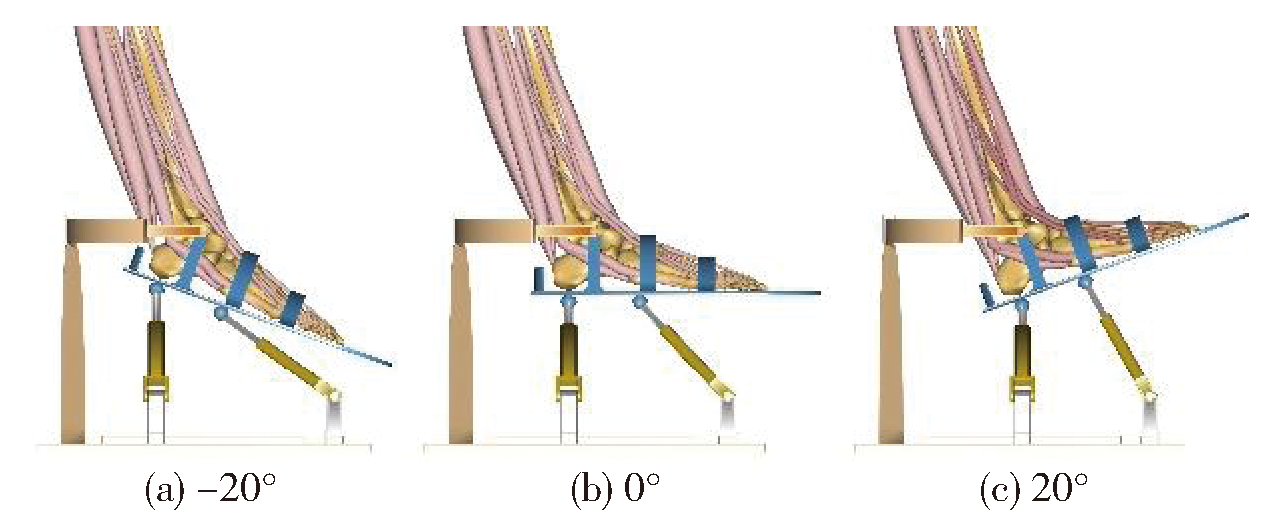
图10 跖屈/背屈运动
Fig.10 Plantarflexion/dorsiflexion motion 】
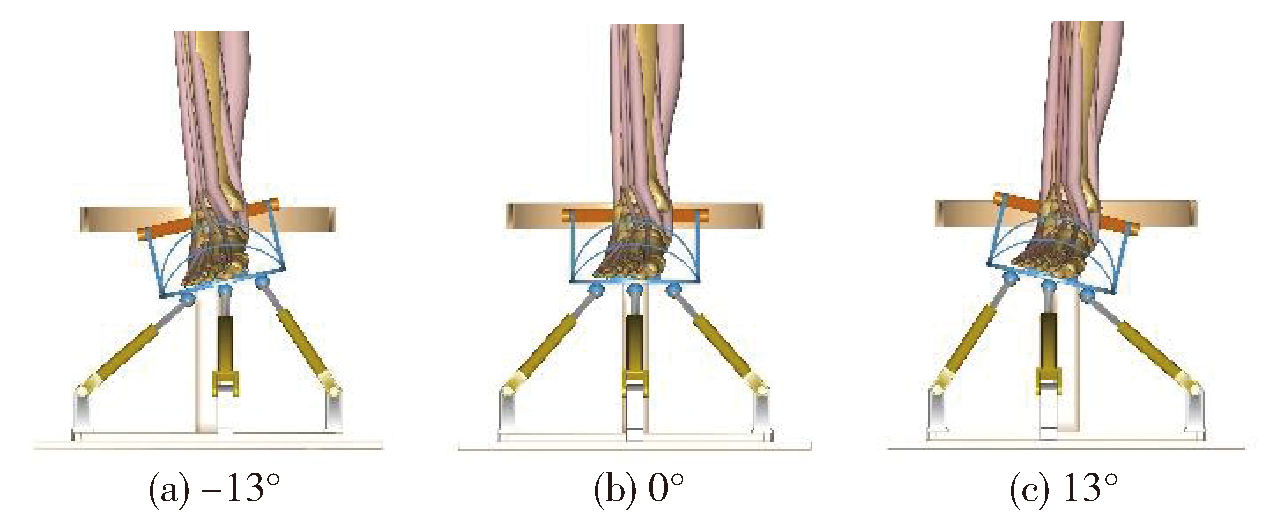
图11 内翻/外翻运动
Fig.11 Inversion/eversion motion
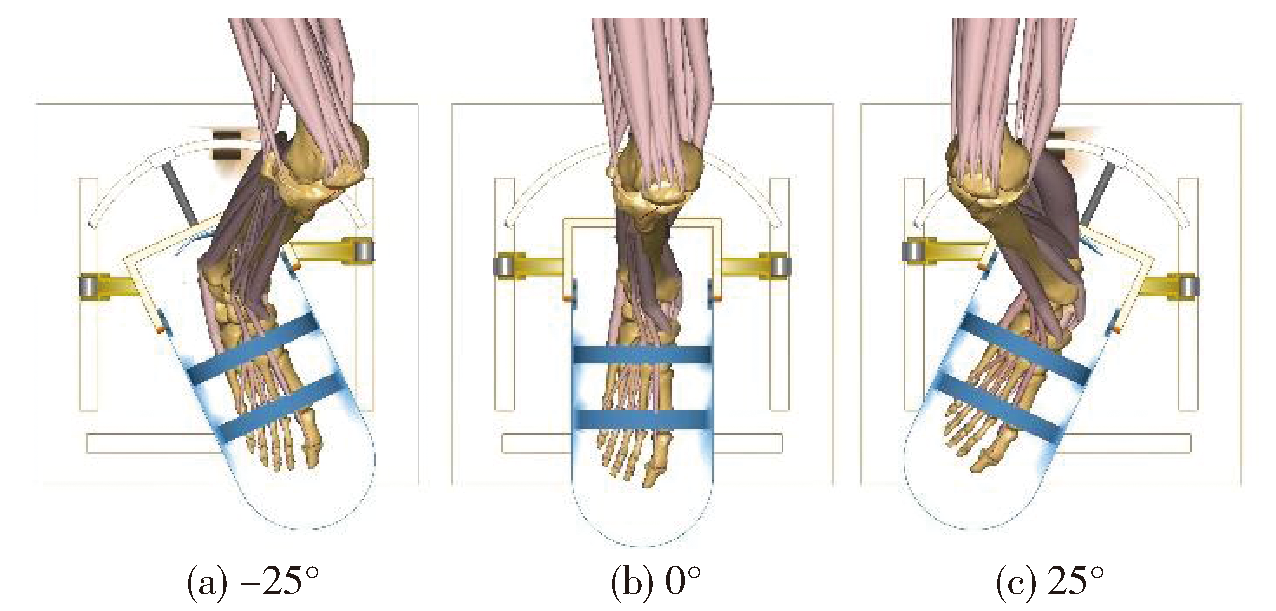
图12 内收/外展运动
Fig.12 Adduction/abduction motion
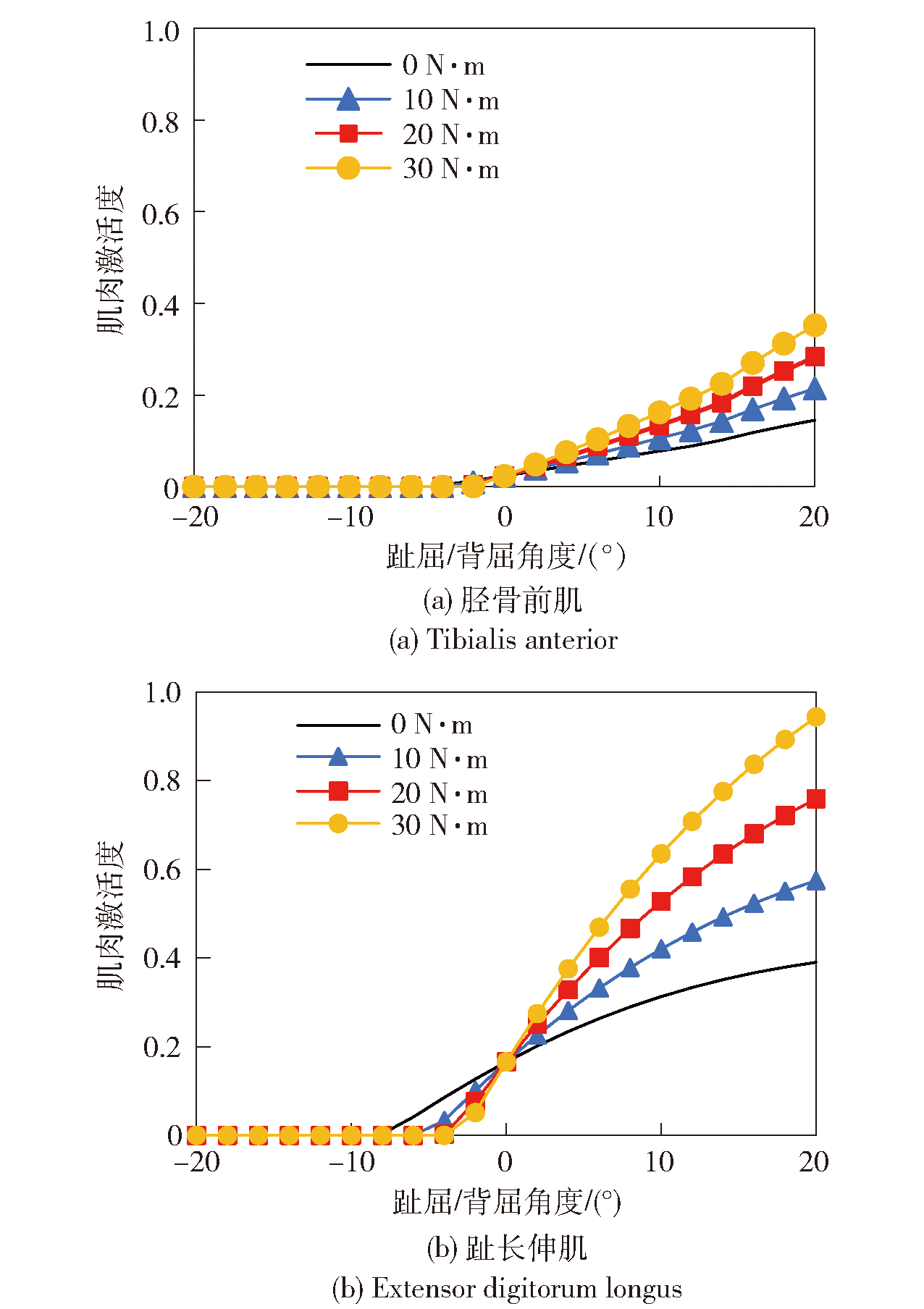
图13 跖屈/背屈时肌肉激活度
Fig.13 Muscle activation during plantarflexion/dorsiflexion motion
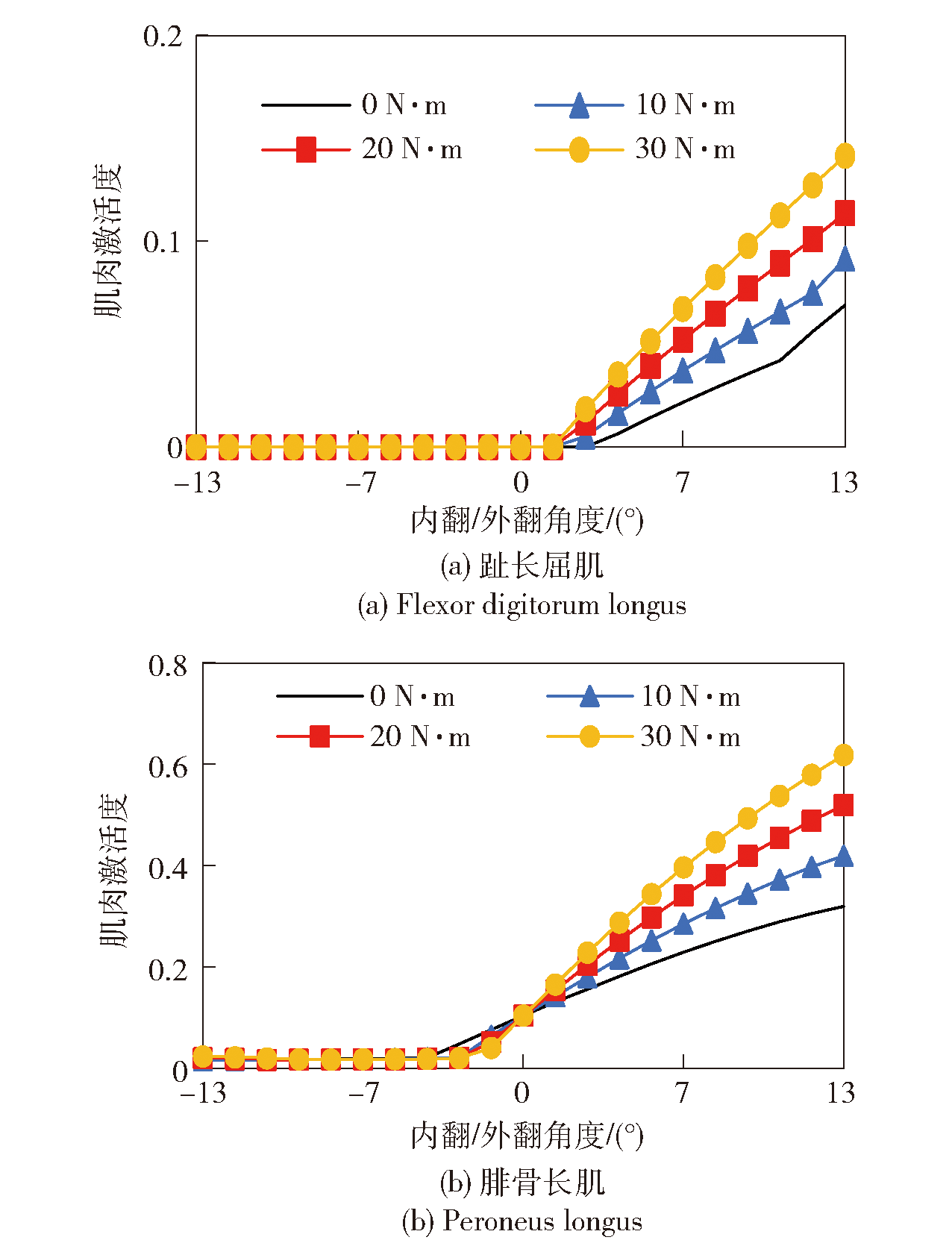
图14 内翻/外翻时肌肉激活度
Fig.14 Muscle activation during inversion/eversion motion
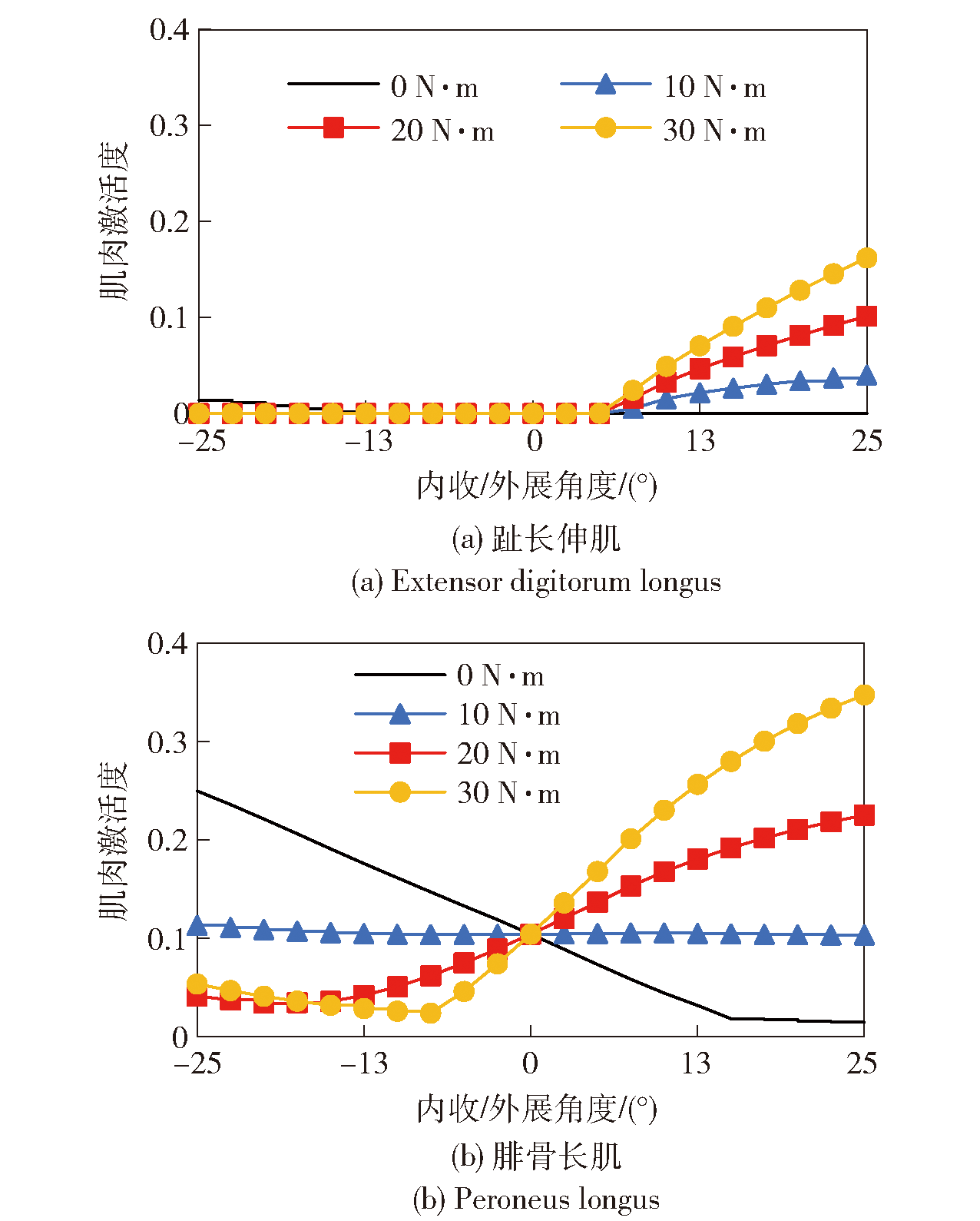
图15 内收/外展时肌肉激活度
Fig.15 Muscle activation during adduction/abduction motion
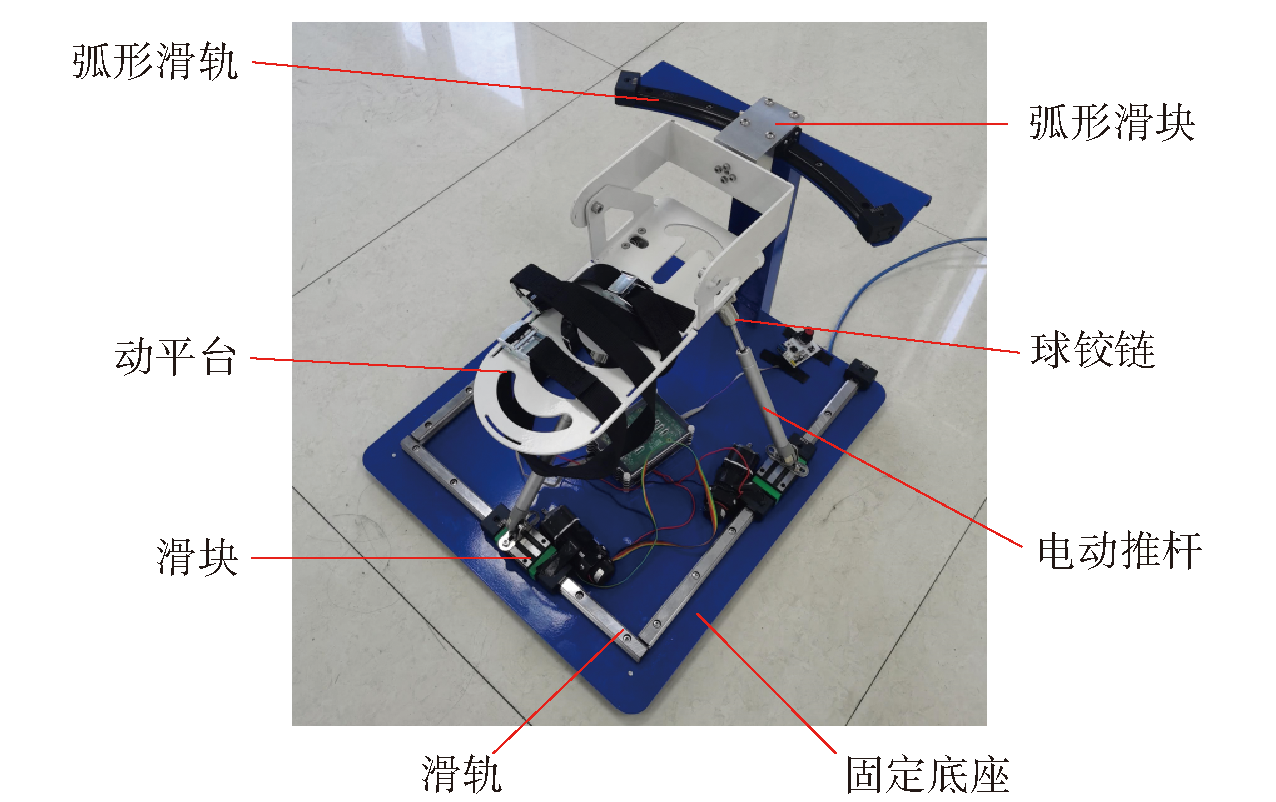
图16 试验样机
Fig.16 The experimental prototype
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| l11/mm | 197 | l23/mm | 43 |
| l12/mm | 152.5 | l4/mm | 293 |
| l13/mm | 152.5 | p1/mm | 195 |
| l21/mm | 43 | p2/mm | 174 |
| l22/mm | 43 | p3/mm | 174 |
表5 试验样机的设计参数
Table 5 Design parameters of the experimental prototype
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| l11/mm | 197 | l23/mm | 43 |
| l12/mm | 152.5 | l4/mm | 293 |
| l13/mm | 152.5 | p1/mm | 195 |
| l21/mm | 43 | p2/mm | 174 |
| l22/mm | 43 | p3/mm | 174 |
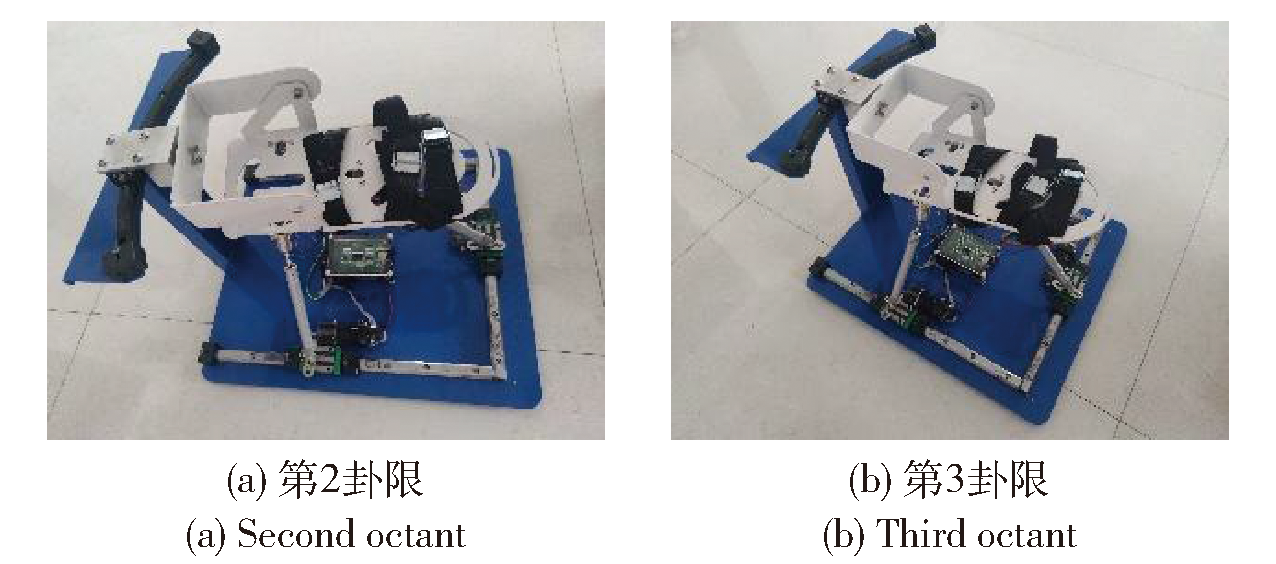
图17 算例1的验证
Fig.17 Verification of example 1
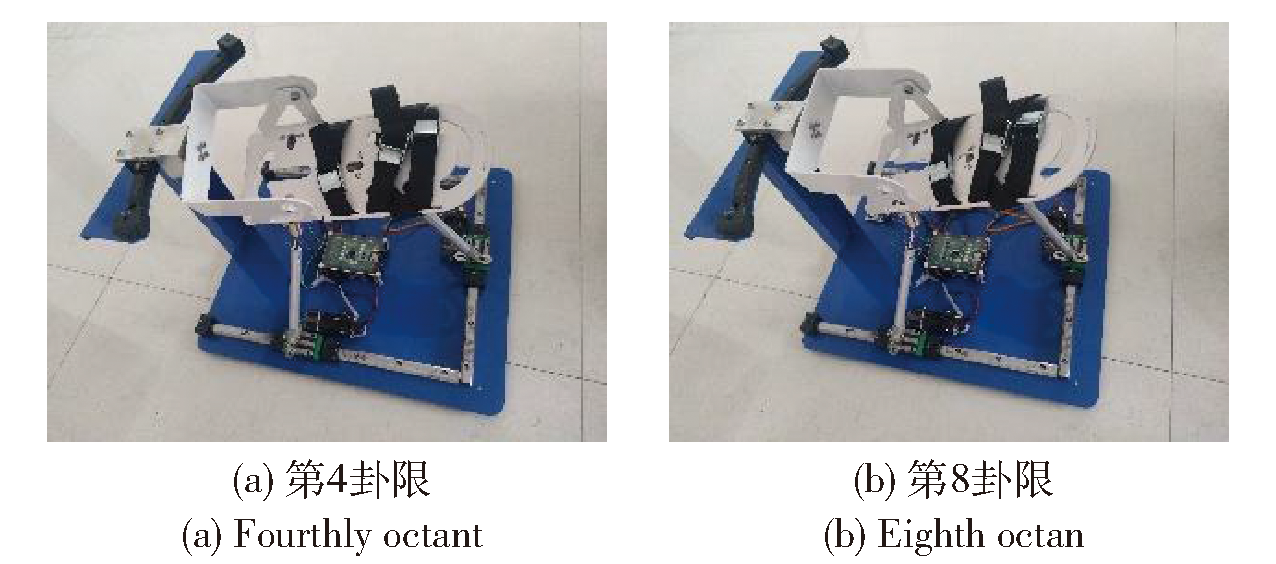
图18 算例2的验证
Fig.18 Verification of example 2

图19 算例3的验证
Fig.19 Verification of example 3
| 算例 | 卦限 | 理论输入值 | 实测输入值 | ||||
|---|---|---|---|---|---|---|---|
| q1 | q2 | q3 | q1 | q2 | q3 | ||
| 1 | 2 | 157.40 | 164.80 | 149.30 | 156.04 | 163.46 | 150.74 |
| 3 | 157.40 | 164.80 | 149.30 | 155.88 | 163.65 | 148.98 | |
| 2 | 4 | 166.50 | 149.50 | 164.80 | 168.01 | 151.12 | 164.77 |
| 8 | 157.40 | 164.80 | 149.30 | 164.69 | 148.93 | 164.82 | |
| 3 | 2 | 168.90 | 174.30 | 160.90 | 170.19 | 175.34 | 159.51 |
表6 位置正解验证
Table 6 Verification of forward kinematic solutions mm
| 算例 | 卦限 | 理论输入值 | 实测输入值 | ||||
|---|---|---|---|---|---|---|---|
| q1 | q2 | q3 | q1 | q2 | q3 | ||
| 1 | 2 | 157.40 | 164.80 | 149.30 | 156.04 | 163.46 | 150.74 |
| 3 | 157.40 | 164.80 | 149.30 | 155.88 | 163.65 | 148.98 | |
| 2 | 4 | 166.50 | 149.50 | 164.80 | 168.01 | 151.12 | 164.77 |
| 8 | 157.40 | 164.80 | 149.30 | 164.69 | 148.93 | 164.82 | |
| 3 | 2 | 168.90 | 174.30 | 160.90 | 170.19 | 175.34 | 159.51 |
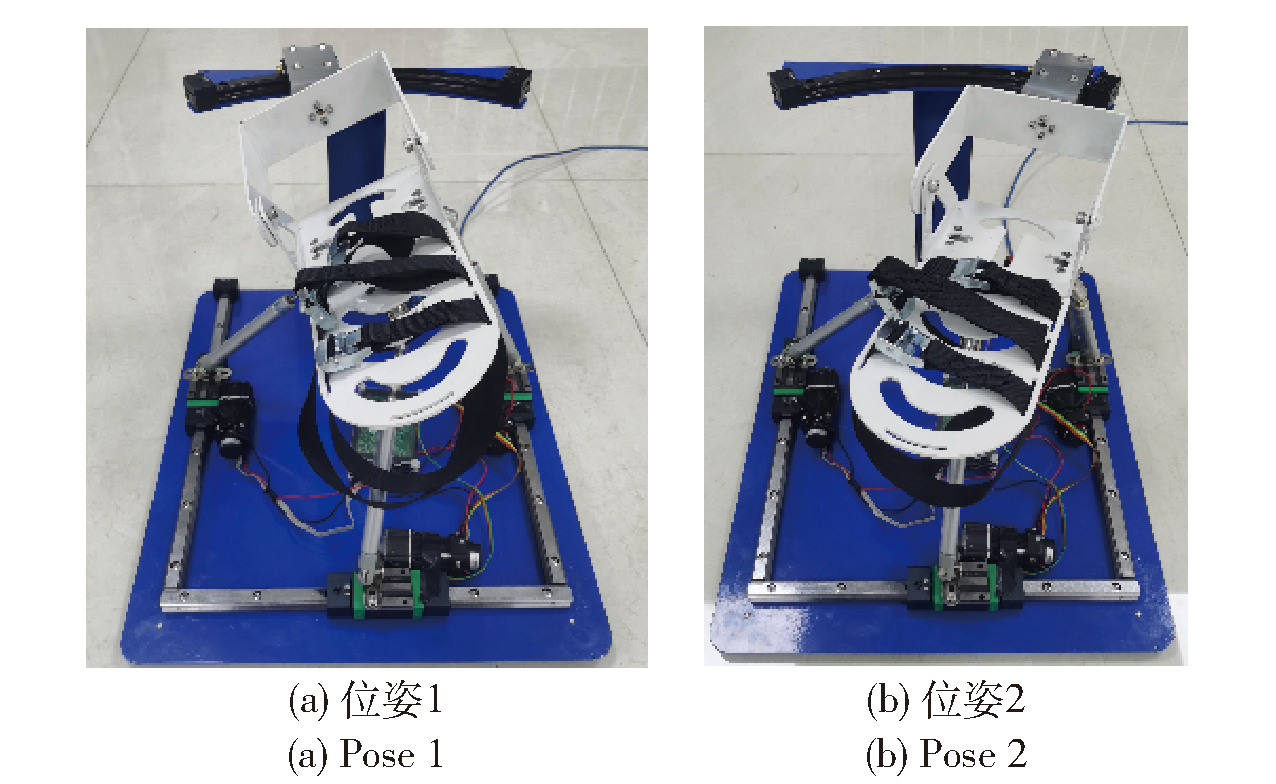
图20 两个指定位姿
Fig.20 Two specified poses
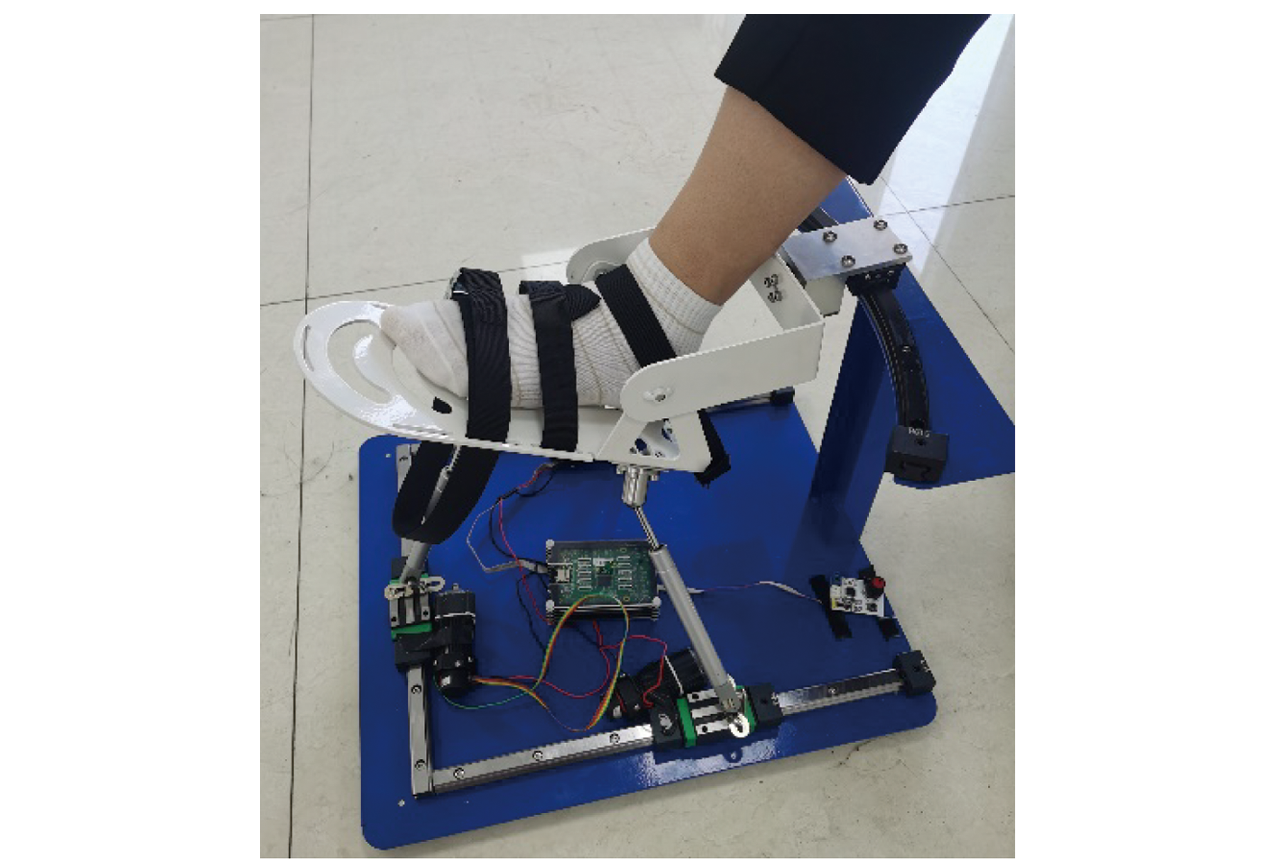
图21 工作空间试验
Fig.21 Workspace experiment
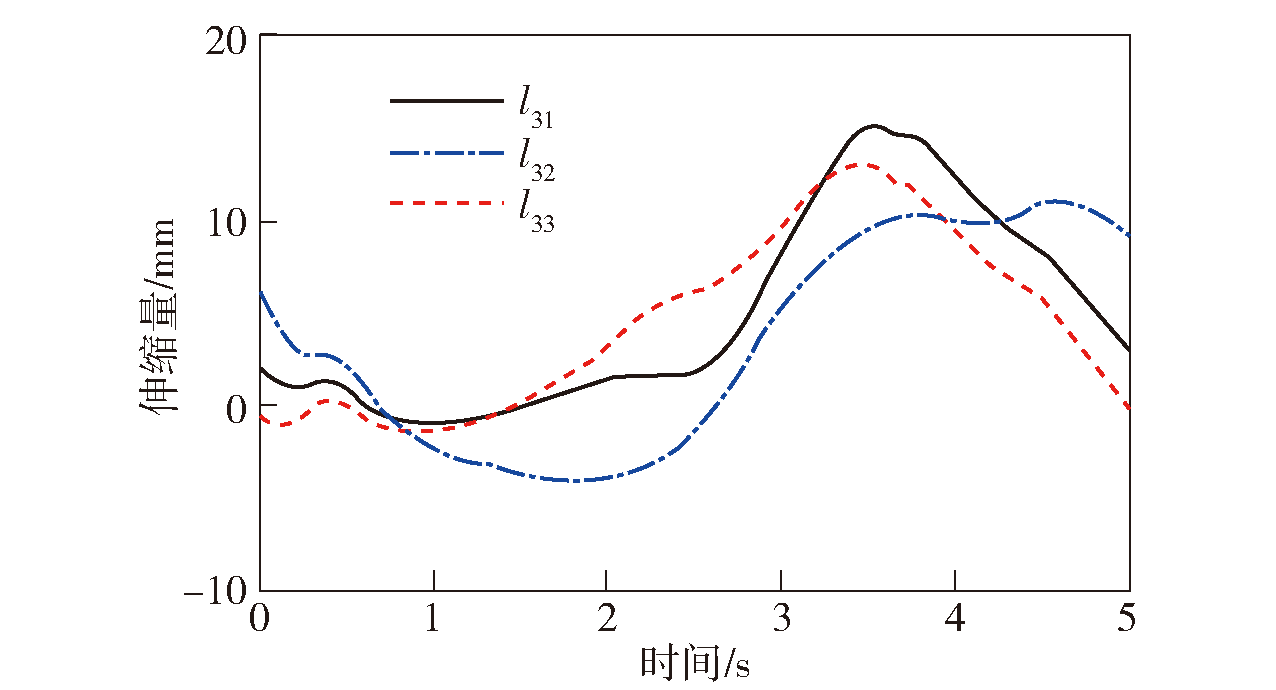
图22 电动推杆伸缩量变化
Fig.22 Variation of the stroke of the linear actuator
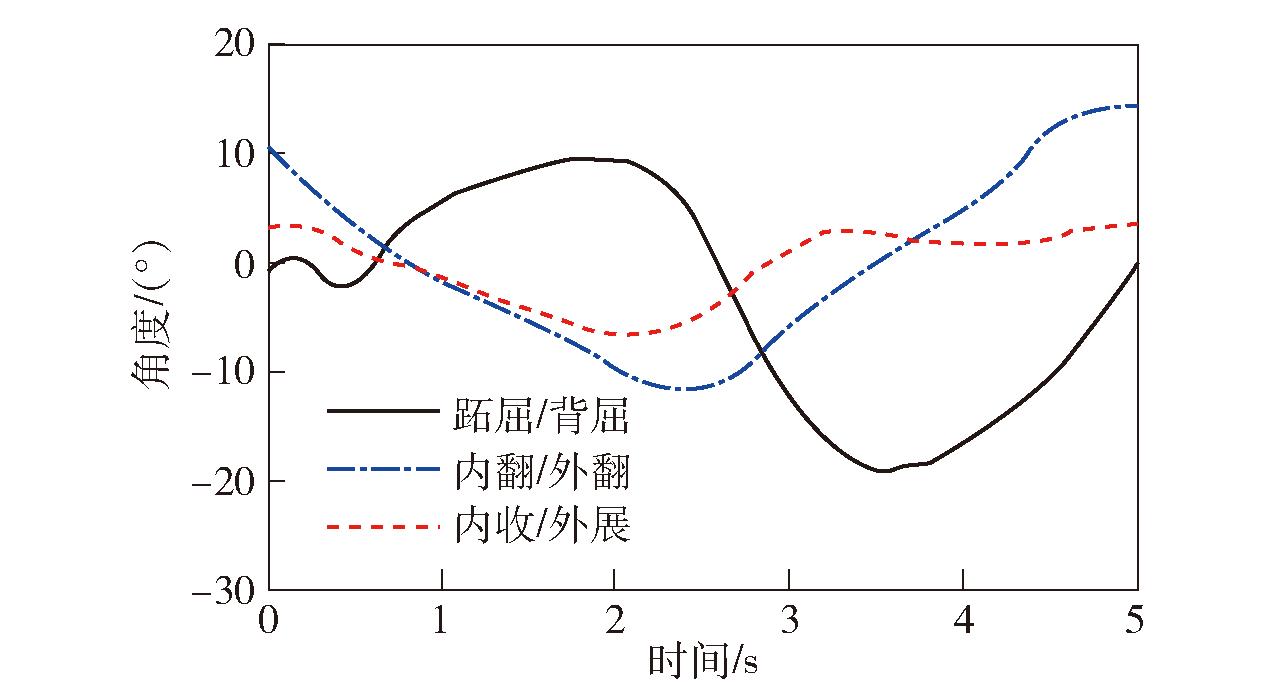
图23 动平台角度变化
Fig.23 Variation of the angle of the moving platform
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
doi: 10.1177/0954411915585597 URL |
| [5] |
|
| [6] |
doi: 10.1016/j.clinbiomech.2016.04.013 URL |
| [7] |
doi: 10.23736/S1973-9087.18.04832-3 pmid: 29600688 |
| [8] |
|
| [9] |
赵磊, 闫照方, 栾倩倩, 等. 大空间运动3-RRRU并联机器人运动学标定与误差分析[J]. 农业机械学报, 2021, 52(11): 411-420.
|
|
|
|
| [10] |
doi: 10.1177/0954411917737584 URL |
| [11] |
|
| [12] |
|
| [13] |
doi: 10.1017/S0263574714001210 URL |
| [14] |
|
| [15] |
doi: 10.1016/j.mechmachtheory.2018.12.017 URL |
| [16] |
doi: 10.3390/s18010066 URL |
| [17] |
王海芳, 陈晓波, 张瑶, 等. 3-SPS/S踝关节并联式康复机器人设计[J]. 中国工程机械学报, 2020, 18(3): 237-241,247.
|
|
|
|
| [18] |
张彦斌, 荆献领, 韩建海, 等. 新型RR-RURU踝关节康复机器人机构的设计与分析[J]. 中国机械工程, 2019, 30(14): 1734-1741.
|
|
|
|
| [19] |
|
| [20] |
李庠, 李瑞琴, 李辉, 等. 可重构单驱动3-RRR平面并联机构连杆曲线与姿态的数值解法[J]. 兵工学报, 2021, 42(5): 1074-1082.
doi: 10.3969/j.issn.1000-1093.2021.05.020 |
|
doi: 10.3969/j.issn.1000-1093.2021.05.020 |
|
| [21] |
中国成年人人体尺寸:GB/T 10000—1988[S]. 北京: 中国标准出版社, 1988.
|
|
Human dimensions of Chinese adults: GB/T 10000—1988[S]. Beijing: China Standard Press, 1988. (in Chinese)
|
|
| [22] |
doi: 10.1016/j.jbiomech.2014.12.034 URL |
| [23] |
|
| [24] |
doi: 10.1177/0954411915585597 URL |
| [1] | 严浩, 王洪波, 陈鹏, 张雷雷, 李云贵. 具有广义肩关节的上肢康复机器人优化设计[J]. 兵工学报, 2021, 42(11): 2491-2502. |
| [2] | 孙鹏, 李研彪, 郭明飞. 一种仿人肩关节的运动学和工作空间分析[J]. 兵工学报, 2019, 40(2): 384-394. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4