
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (8): 2477-2485.doi: 10.12382/bgxb.2022.0292
杜永刚*( ), 王雪松, 王禺林
), 王雪松, 王禺林
收稿日期:2022-04-22
上线日期:2023-08-30
通讯作者:
DU Yonggang*(), WANG Xuesong, WANG Yuling
Received:2022-04-22
Online:2023-08-30
摘要:
实现高指向精度是单级控制指向系统的主要技术难题,消除指向机构的位置浮动环节可提高其指向精度,为此提出一种单级控制的高精度指向系统。采用一种无位置浮动环节的RPS-SPS并联指向机构,通过研究其传动模型和误差消除算法,验证所提指向系统原理的正确性,进行了原型机研制和实验测试。测试结果表明:在加载和空载两种状态下,原型机的单轴指向误差均不大于0.004°,其合成指向误差均优于0.006°,其指向稳定时间均小于100ms,原型机具备了两轴的指向功能,其工作空间可达到两轴±9°。理论和实验研究均证明了该指向系统的可行性和有效性,研究成果为该单级控制的高精度指向系统的工程应用奠定了技术基础。
中图分类号:
杜永刚, 王雪松, 王禺林. 一种单级控制的高精度指向系统研究[J]. 兵工学报, 2023, 44(8): 2477-2485.
DU Yonggang, WANG Xuesong, WANG Yuling. Research on a High-Precision Pointing System with Single-Stage Control[J]. Acta Armamentarii, 2023, 44(8): 2477-2485.
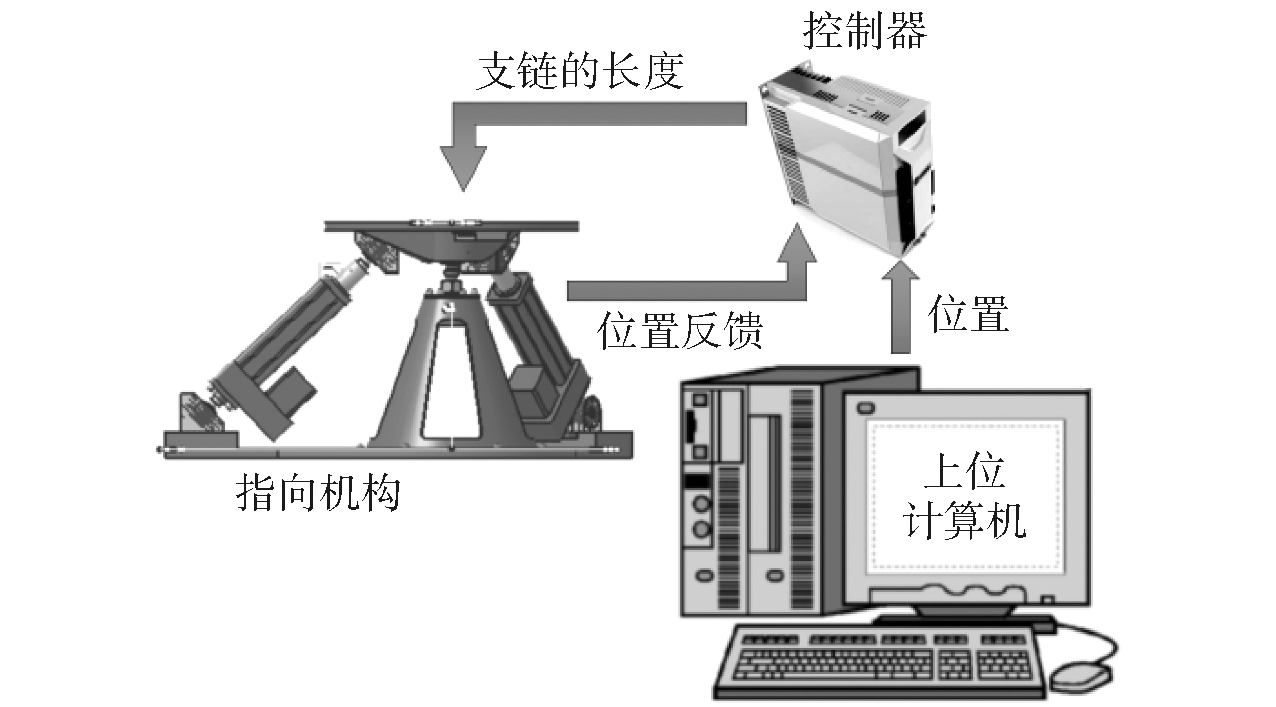
图1 高精度指向系统的组成结构
Fig.1 Configuration of the high-precision pointing system
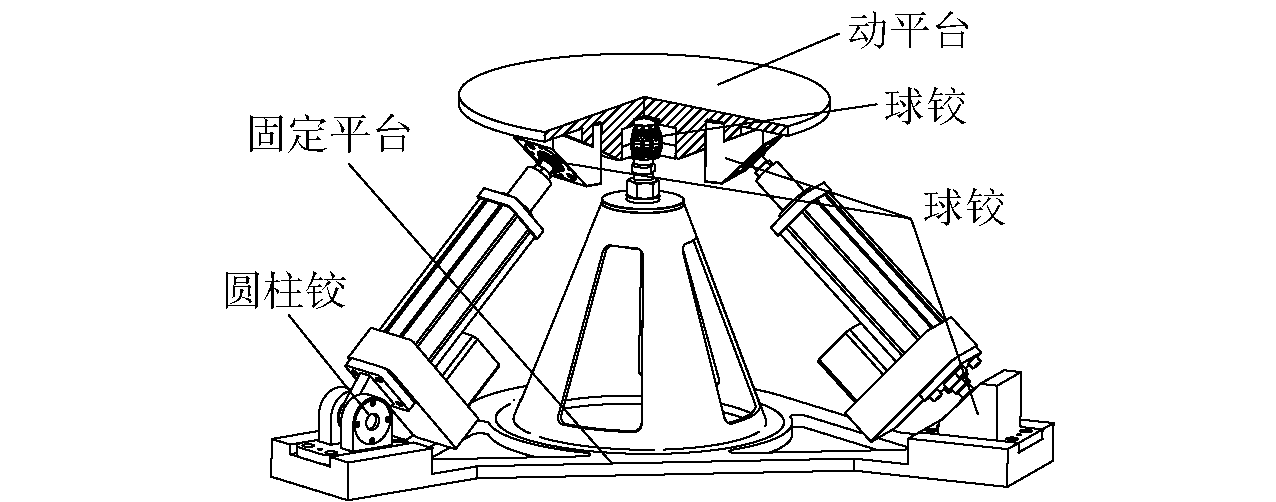
图2 并联机构的组成
Fig.2 Composition of the parallel mechanism
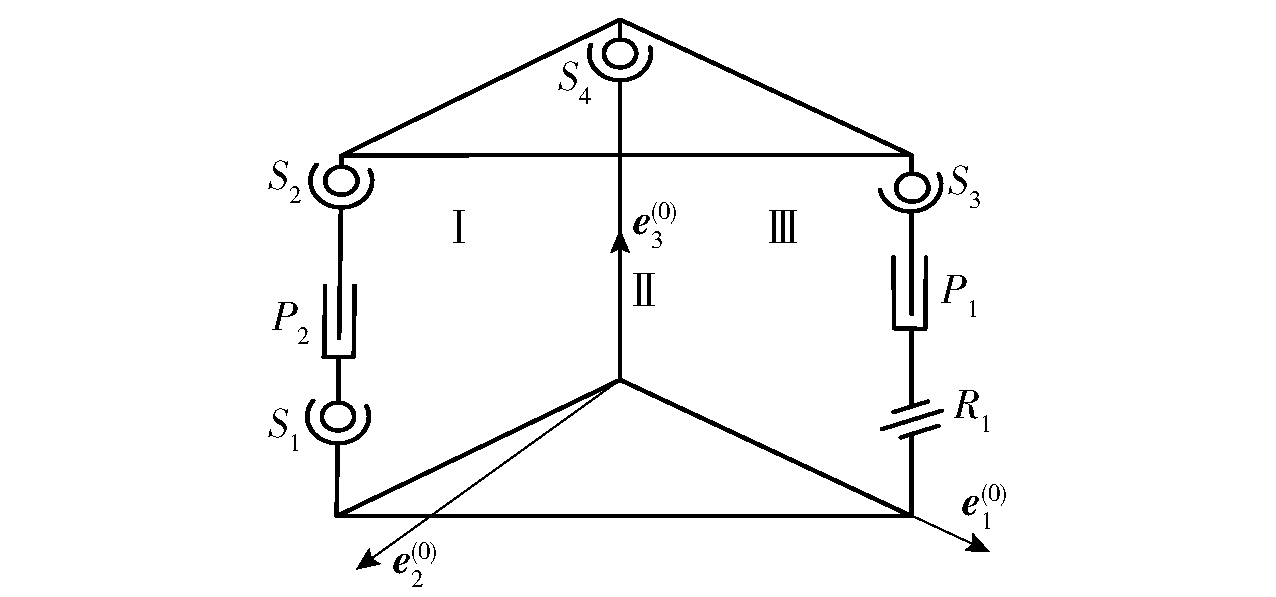
图3 机构原理图
Fig.3 Schematic diagram of the mechanism
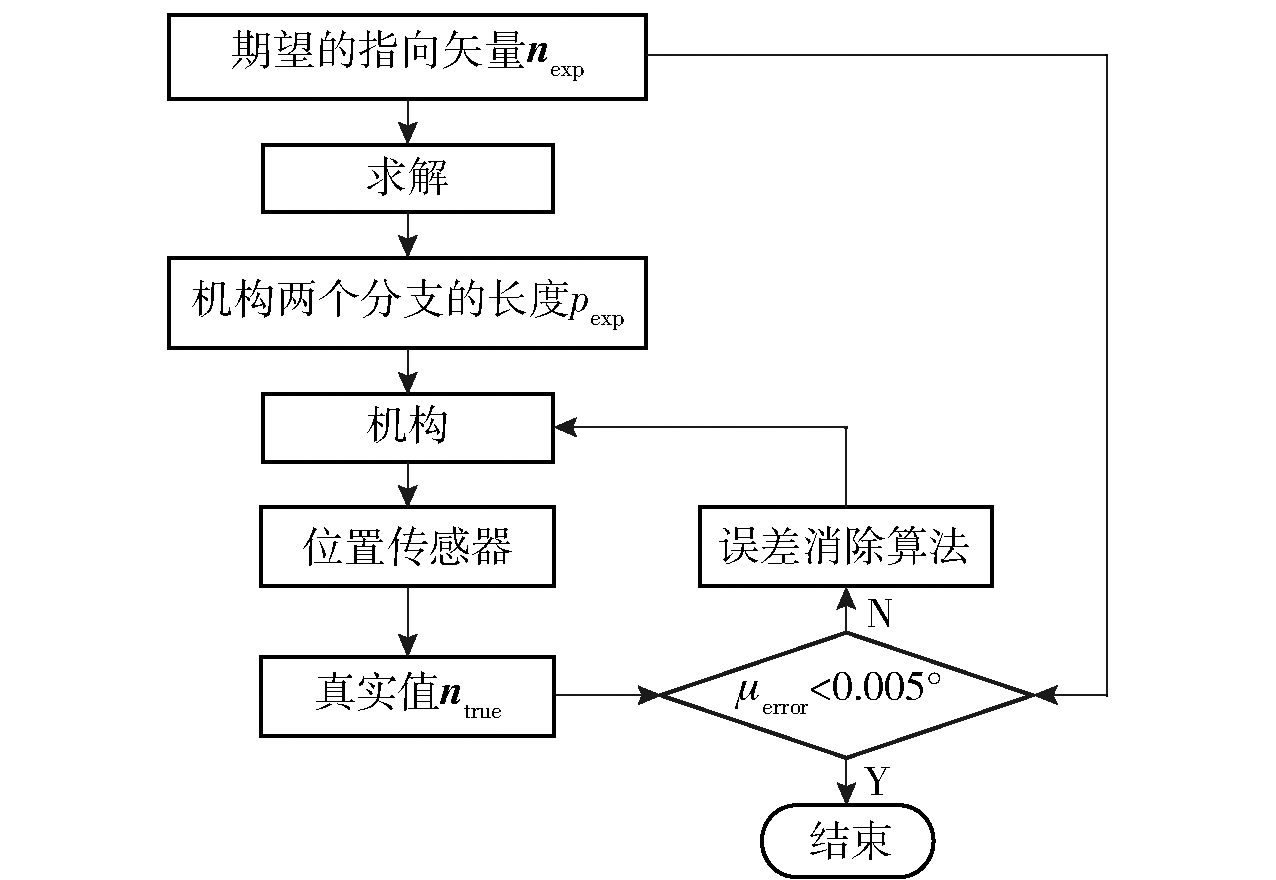
图4 指向机构的控制策略
Fig.4 Control process of the pointing mechanism
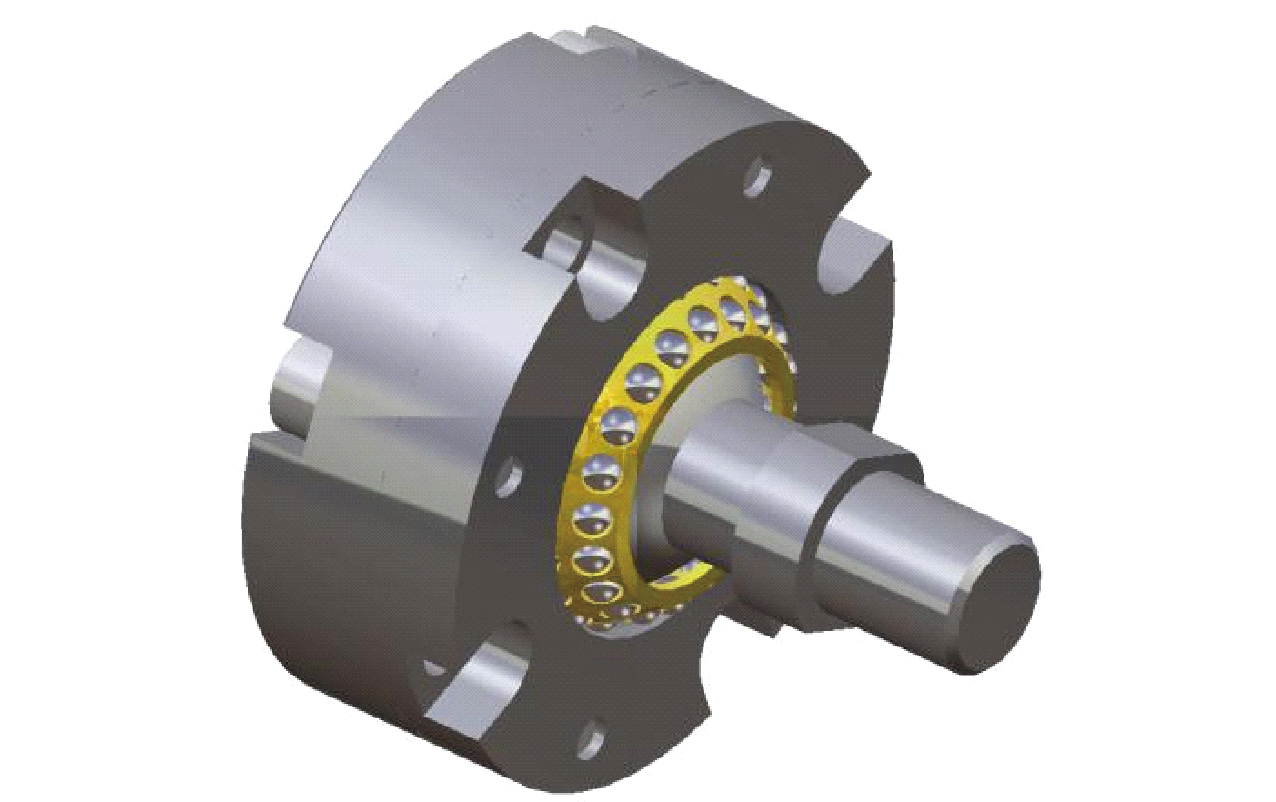
图5 指向机构的滚动球轴承
Fig.5 Rolling ball bearing of the pointing mechanism
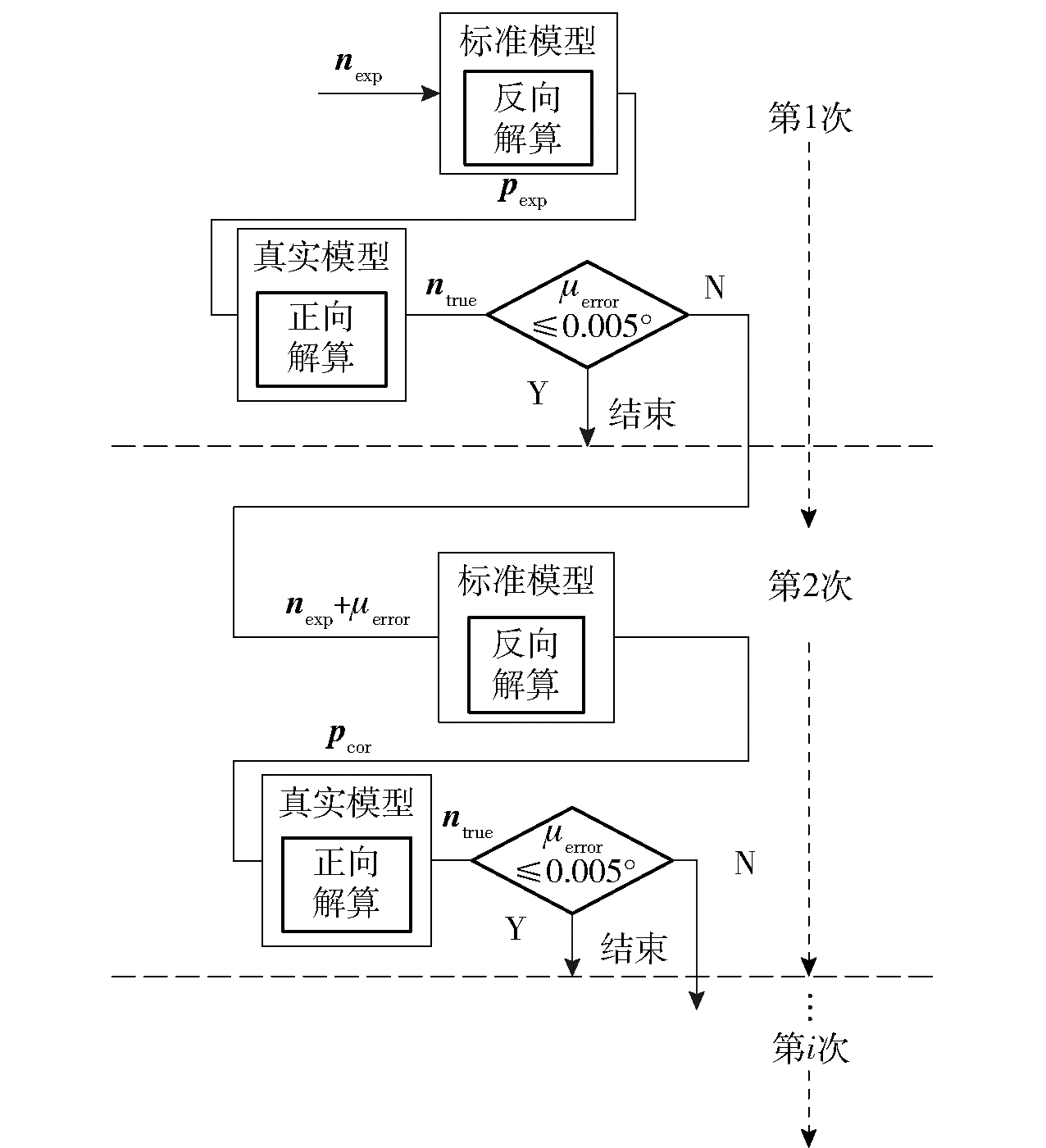
图6 指向机构的误差消除算法流程
Fig.6 Error elimination algorithm of the pointing mechanism
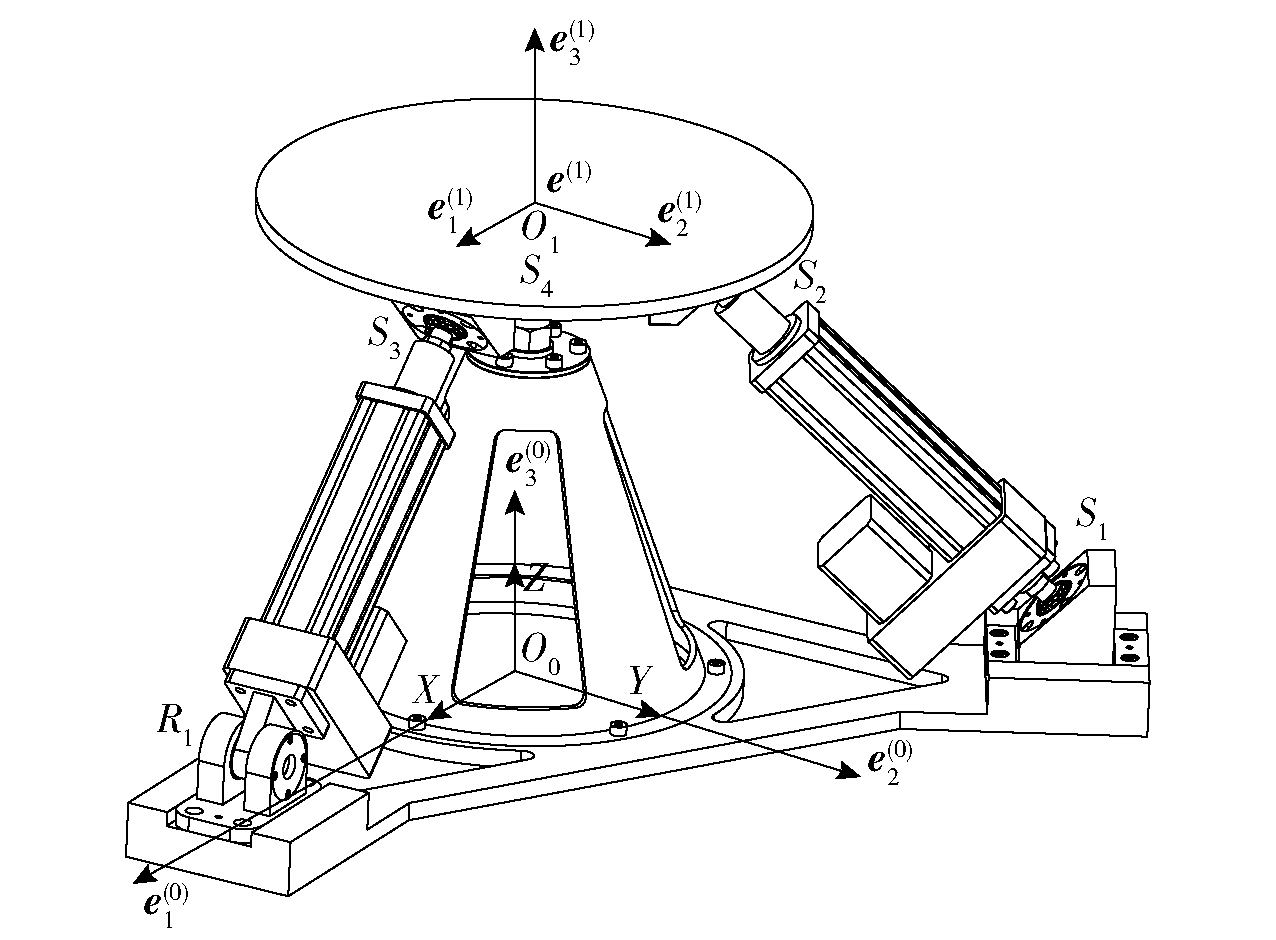
图7 空间坐标系的定义
Fig.7 Definition of the spatial coordinate system
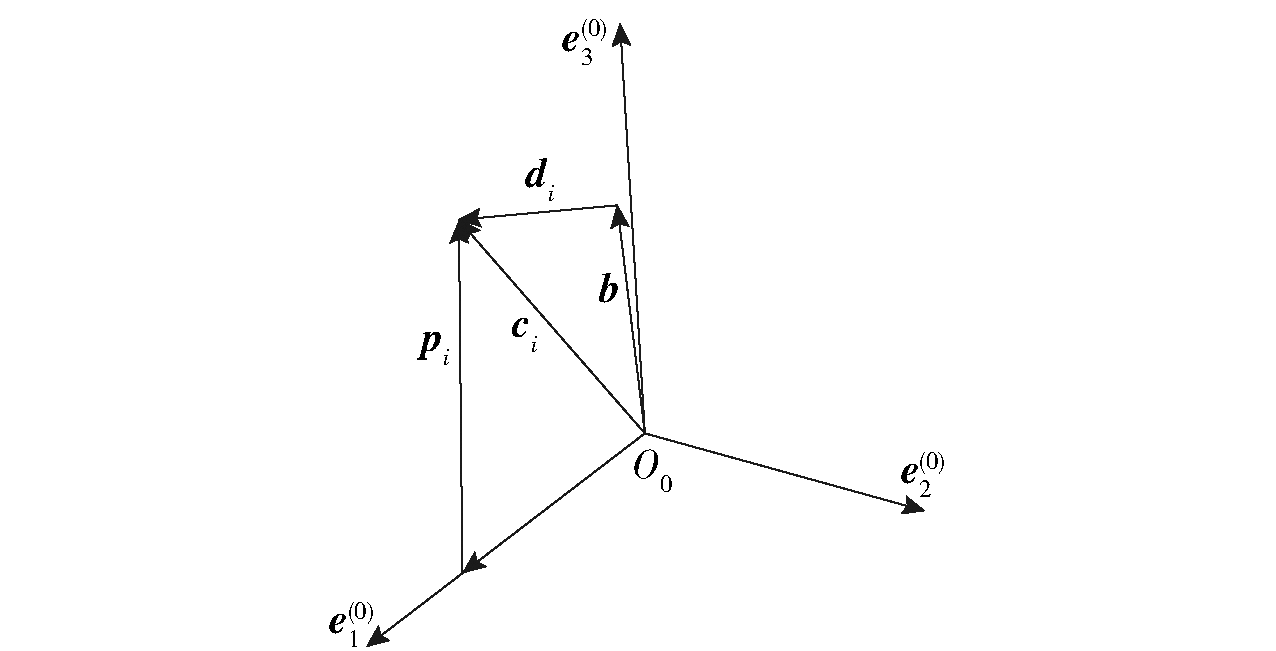
图8 单分支的矢量定义
Fig.8 Vector definition of single leg
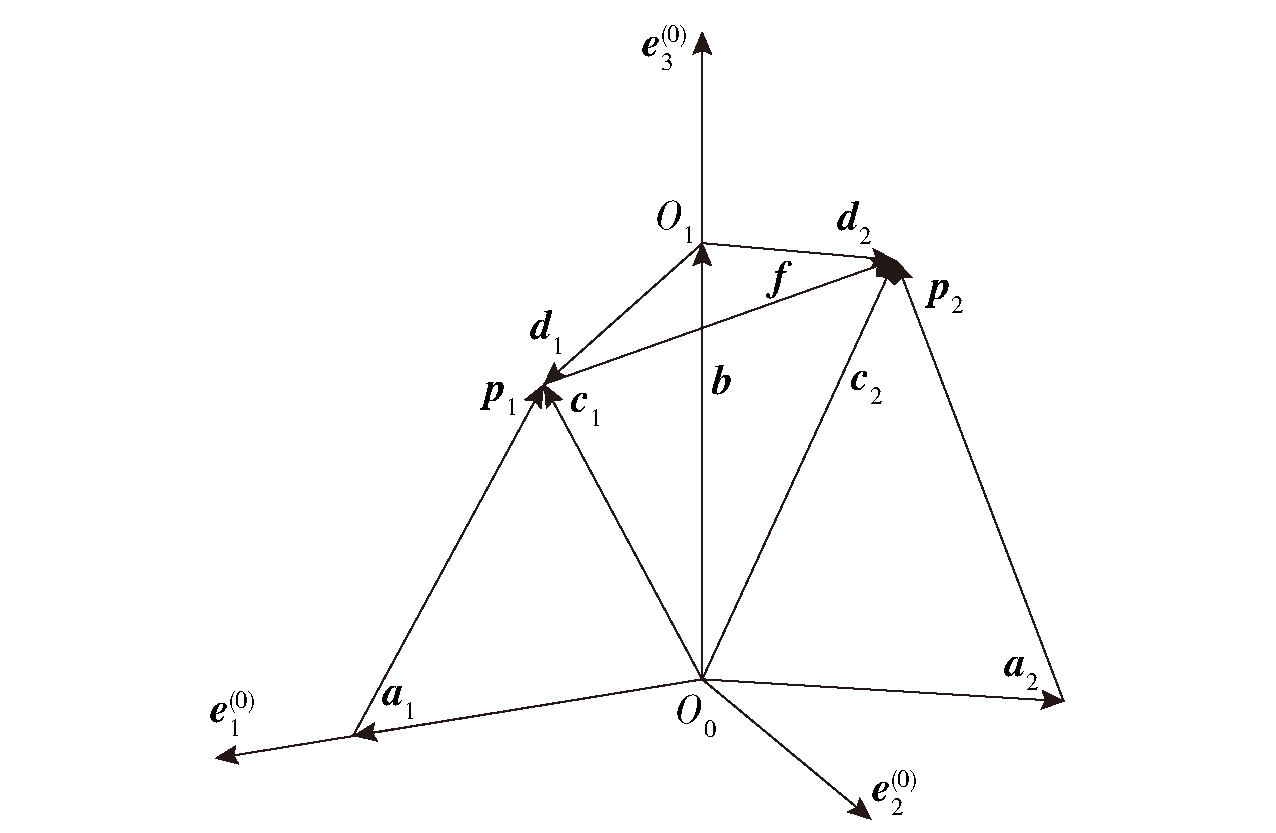
图9 双分支的矢量定义
Fig.9 Vector graph of double legs
| a/mm | b/mm | d/mm | α/(°) |
|---|---|---|---|
| 388.0 | 377.0 | 135.6 | 120 |
表1 指向机构的参数
Table 1 Parameters of the pointing mechanism
| a/mm | b/mm | d/mm | α/(°) |
|---|---|---|---|
| 388.0 | 377.0 | 135.6 | 120 |
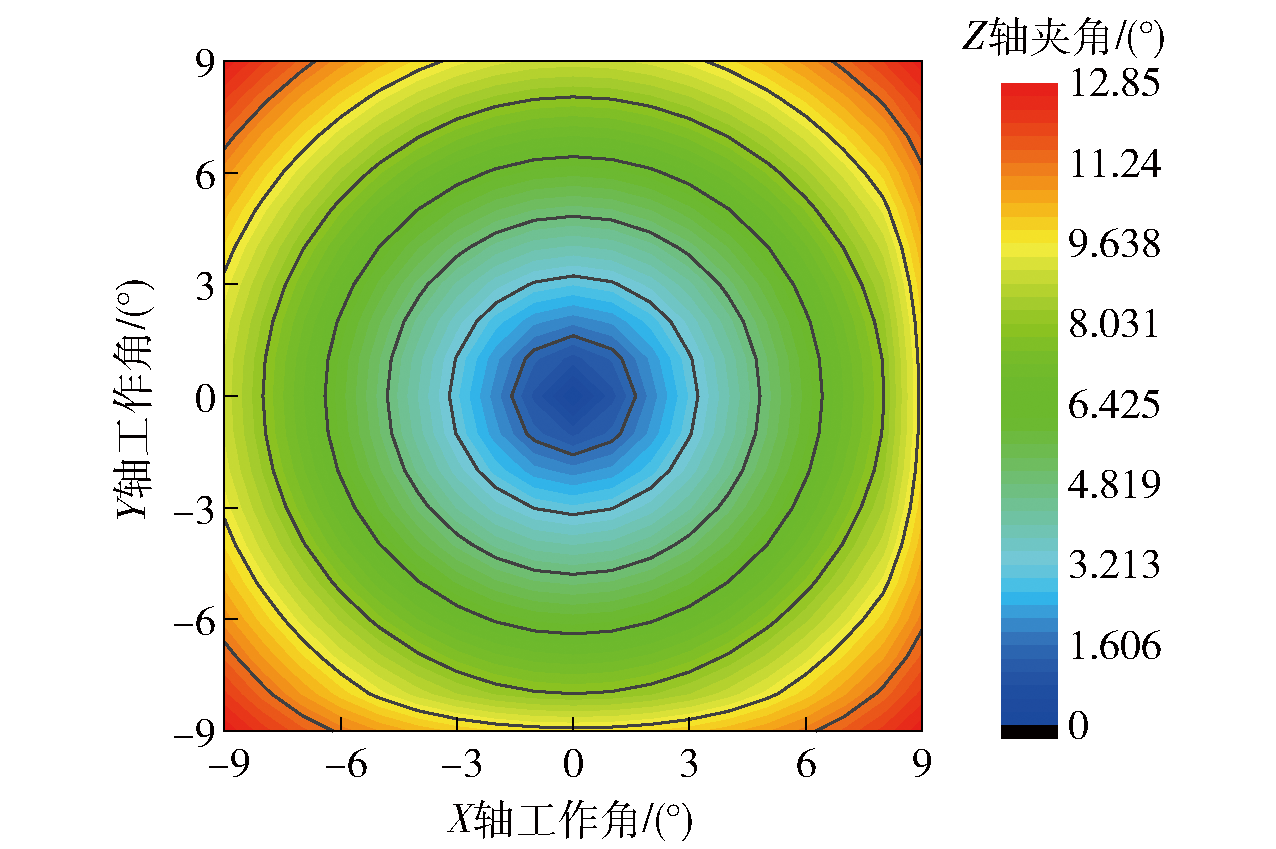
图10 机构工作空间的仿真结果
Fig.10 Simulation results of the mechanism workspace
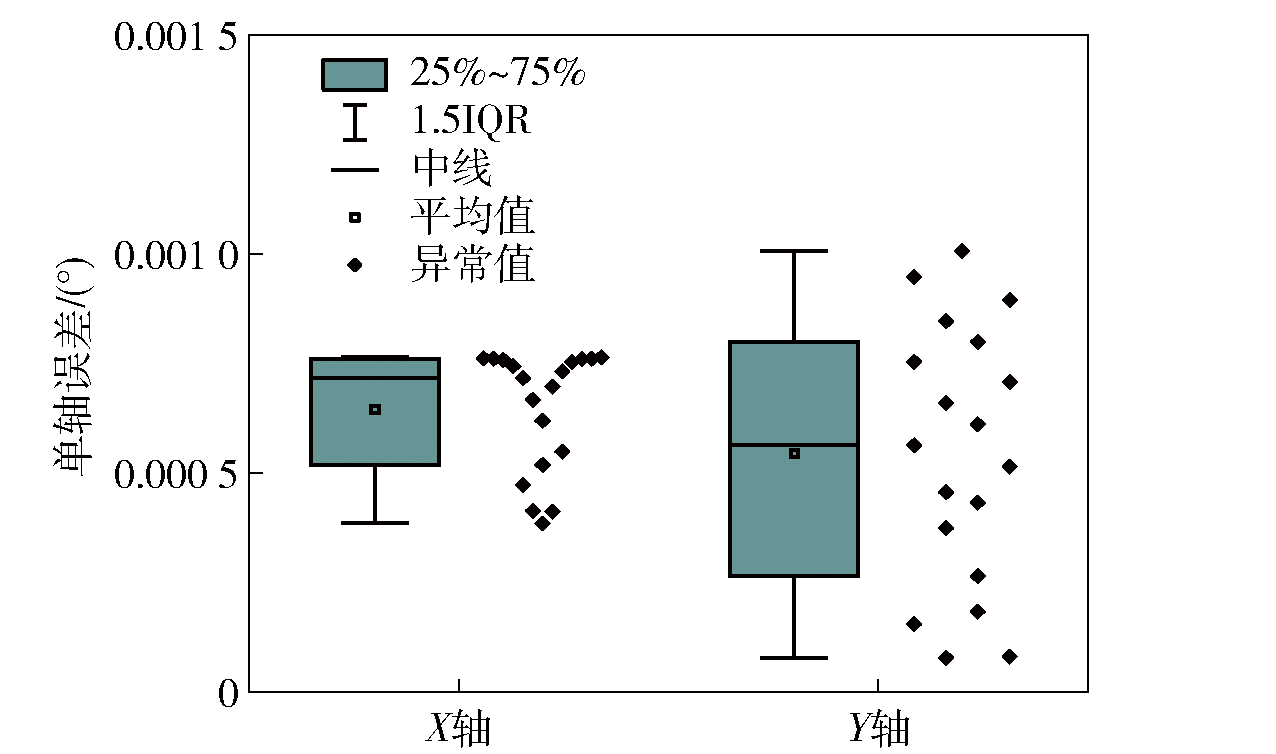
图11 单轴误差的仿真结果
Fig.11 Simulation results of uniaxial errors
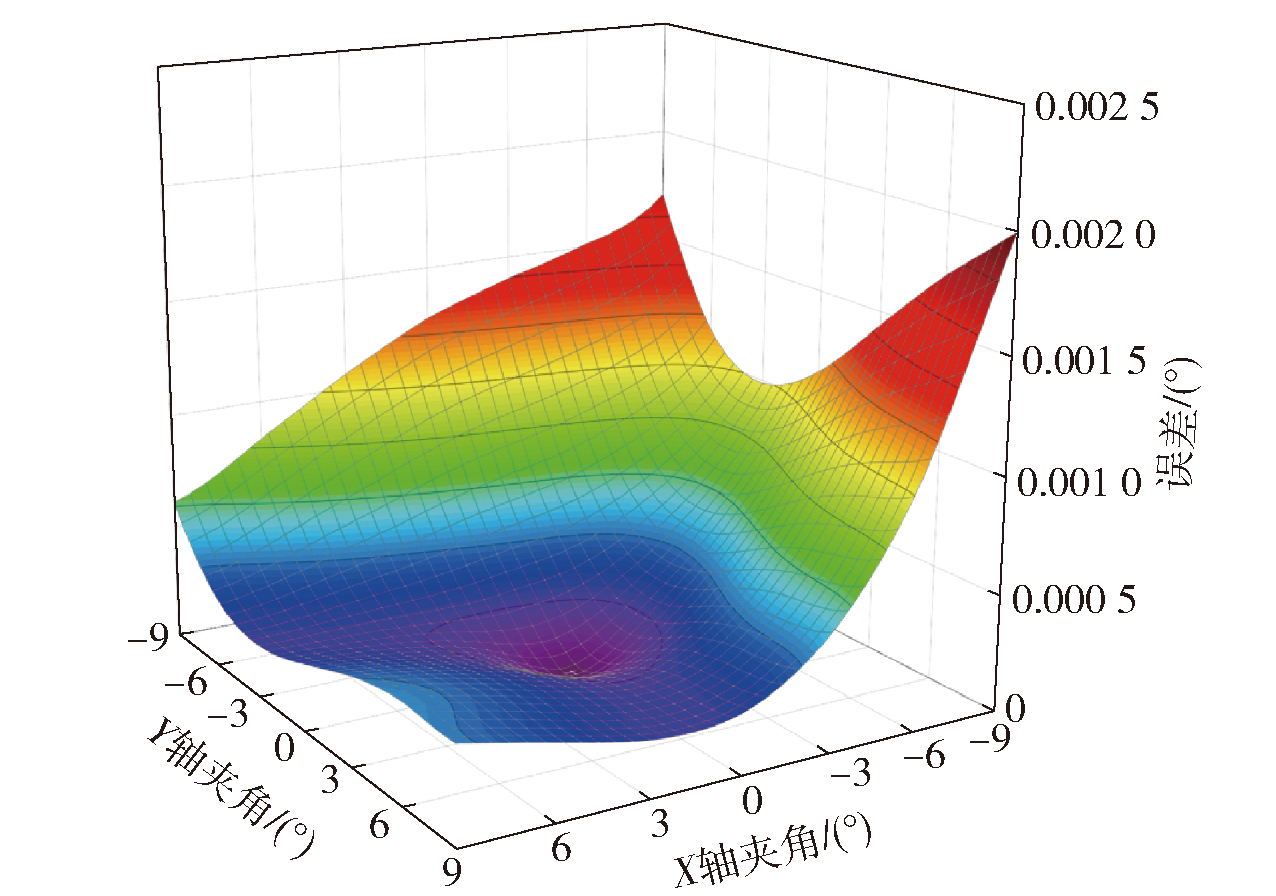
图12 合成指向误差的仿真结果
Fig.12 Simulation results of synthetic pointing errors
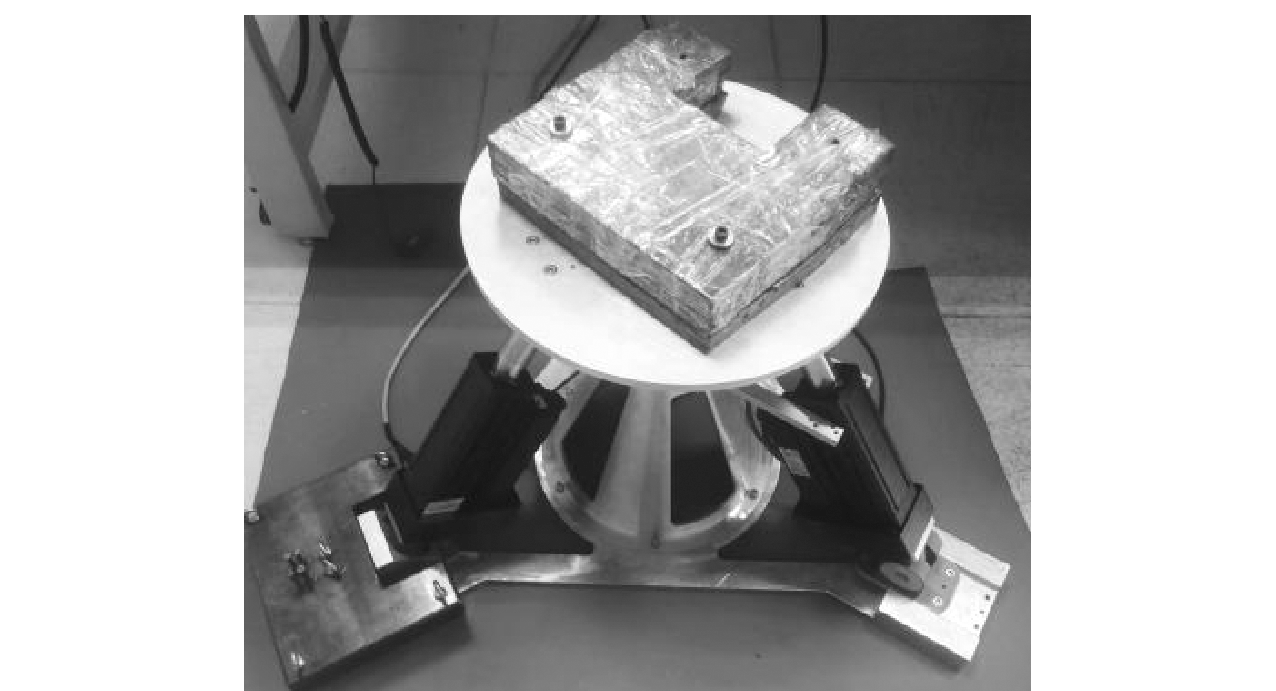
图13 系统原型机的外观照片
Fig.13 Photograph of the prototype
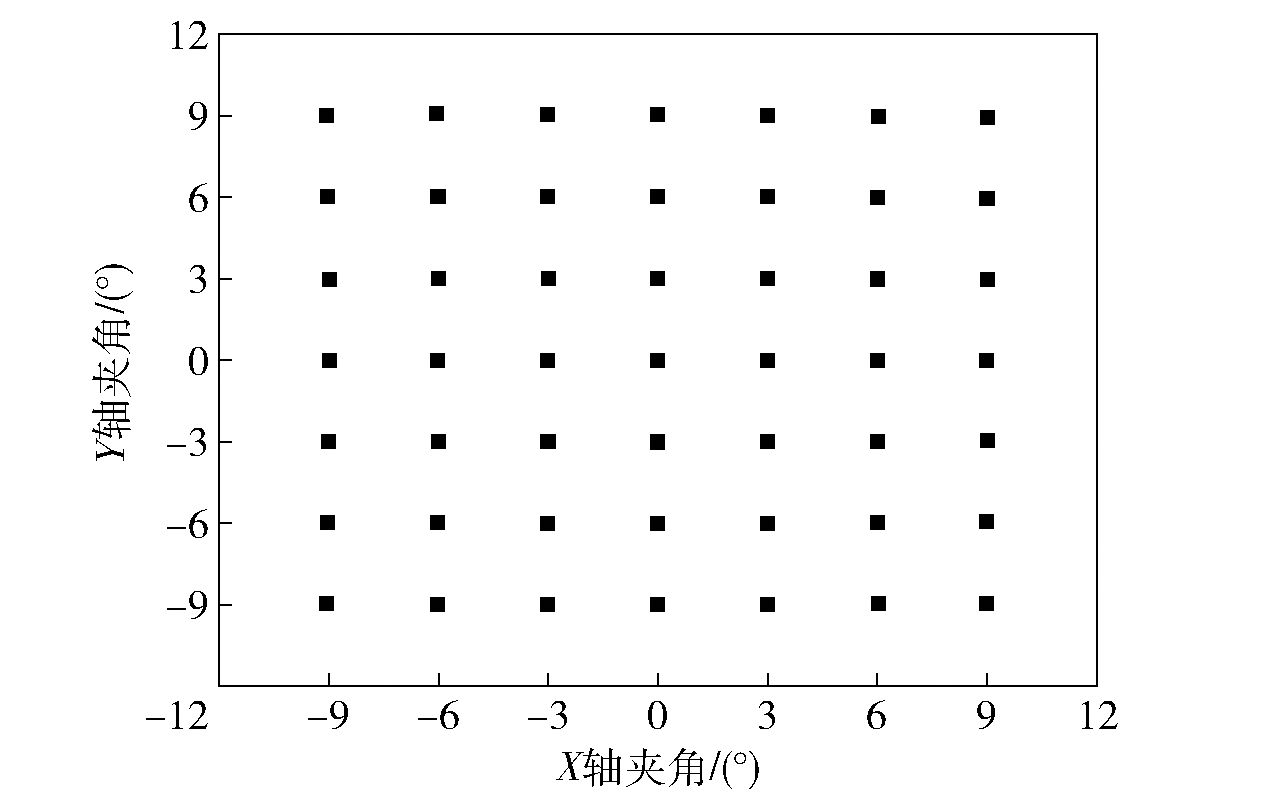
图14 工作空间的测试结果
Fig.14 Test results of the workspace
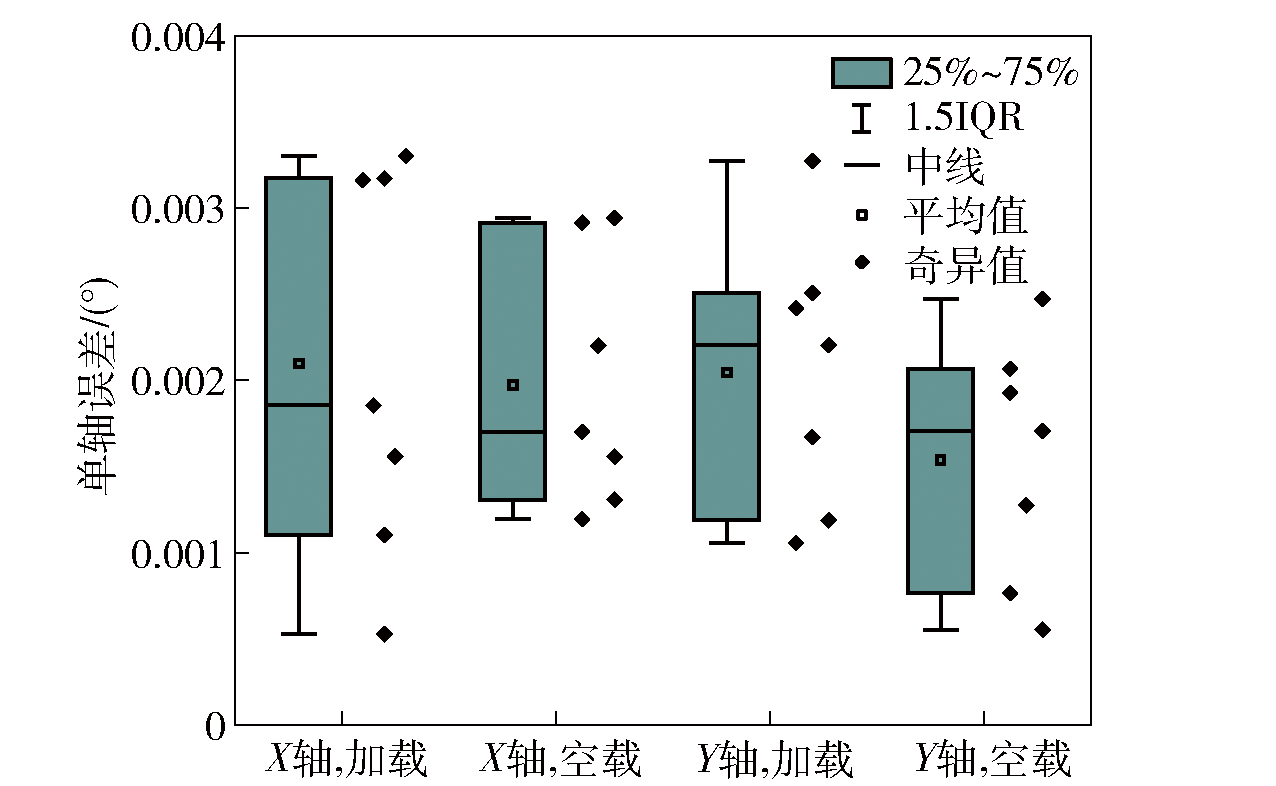
图15 单轴误差的测试结果
Fig.15 Test results of uniaxial error
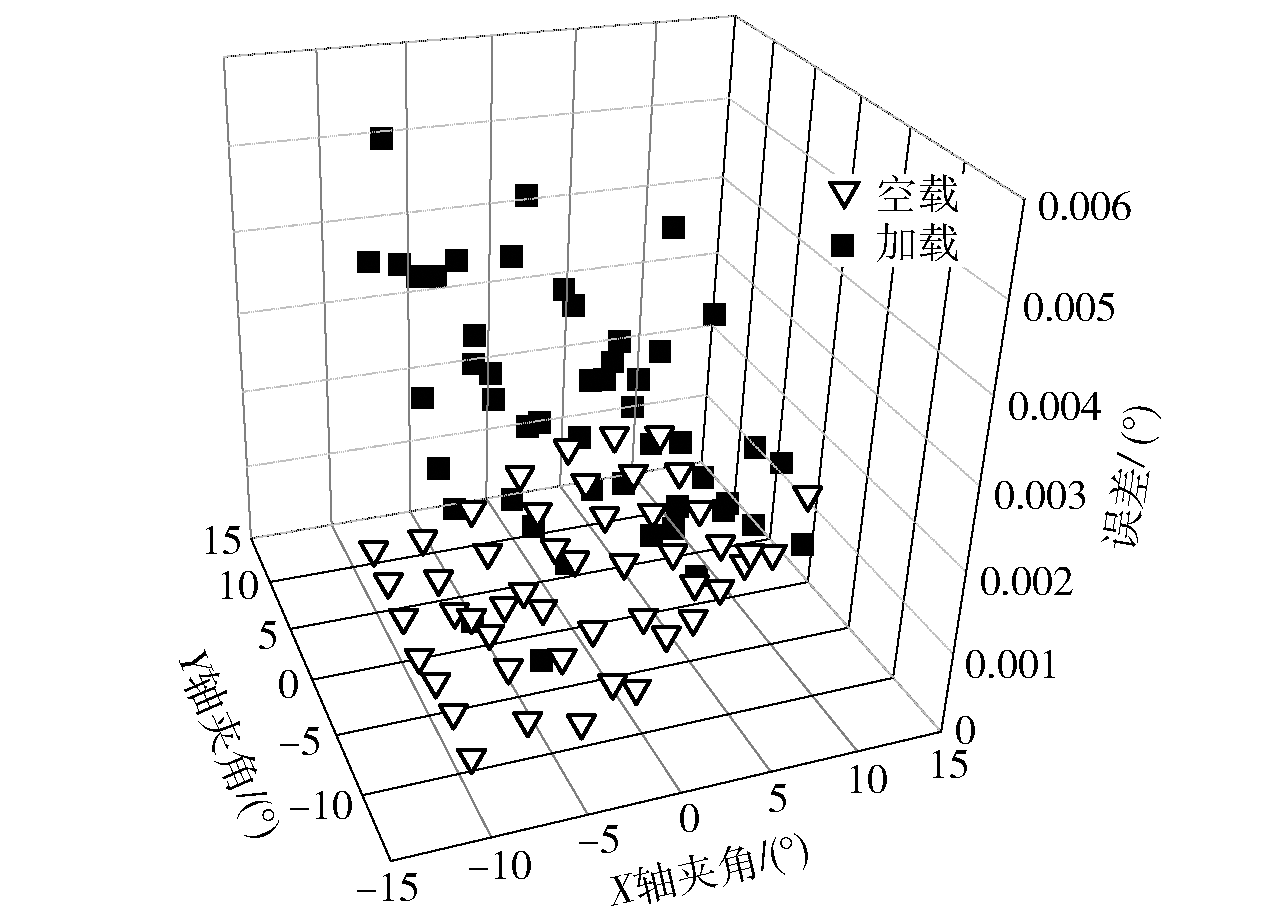
图16 合成误差的测试结果
Fig.16 Test results of synthesis error
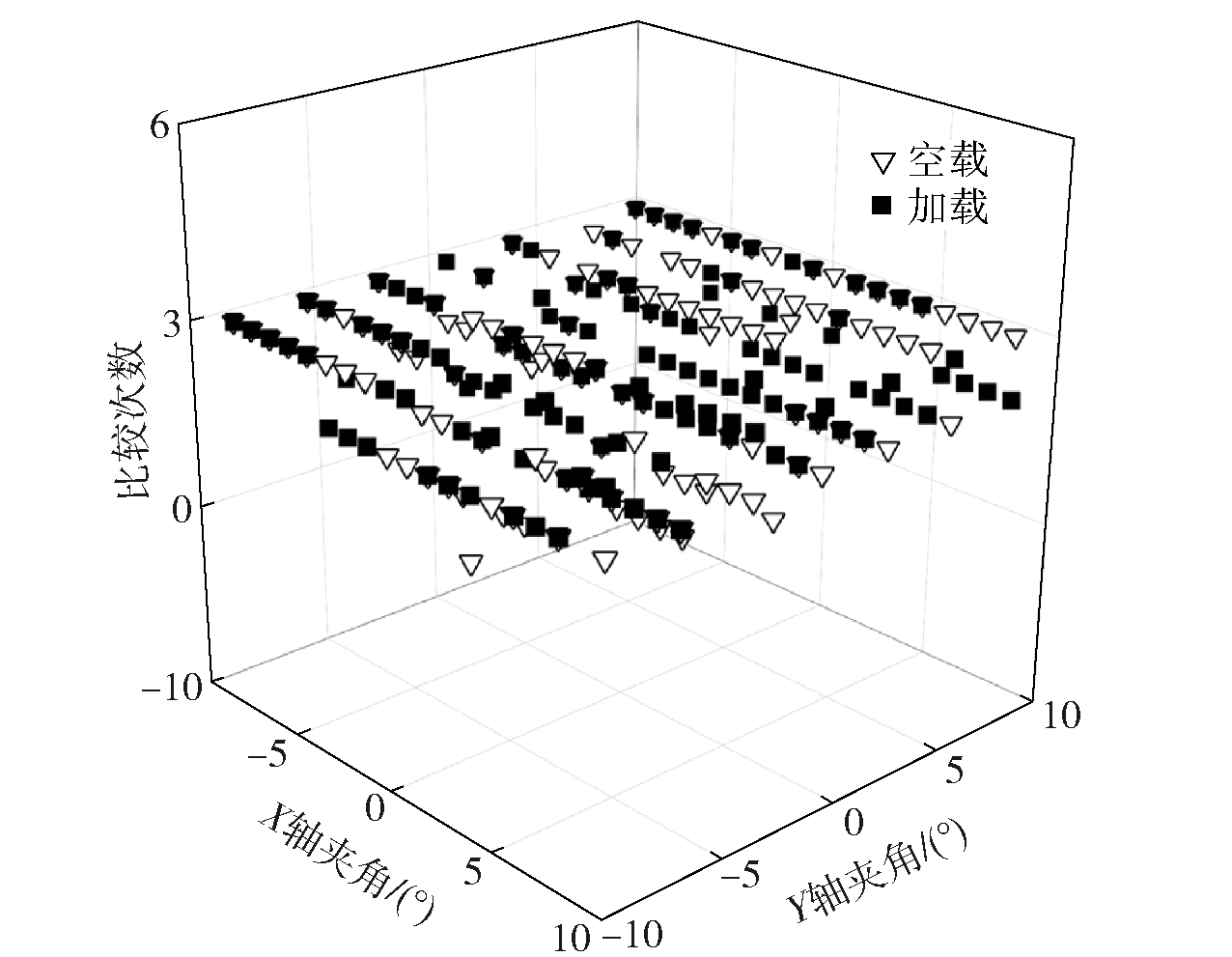
图17 比较次数的测试结果
Fig.17 Test results of comparison times
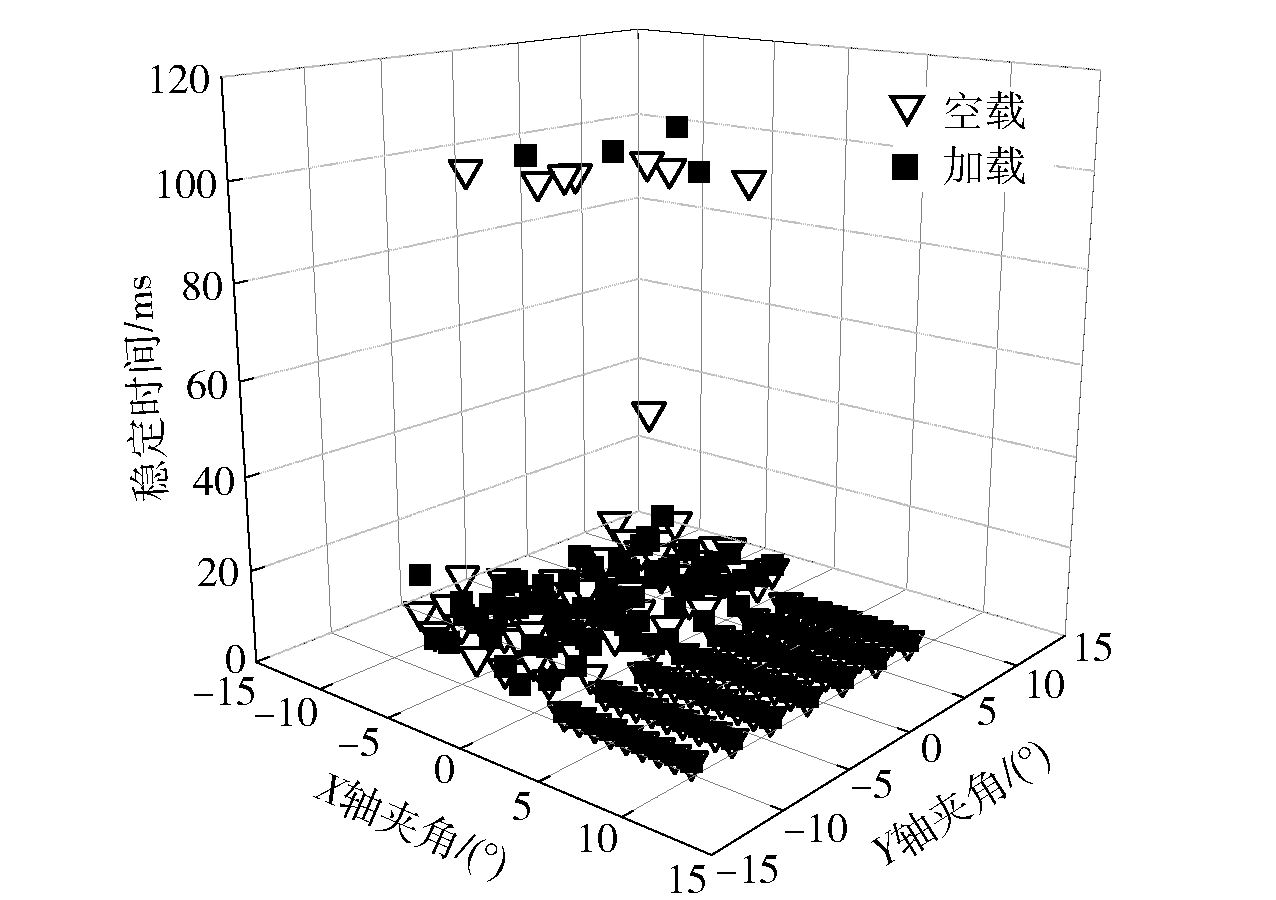
图18 稳定时间的测试结果
Fig.18 Test results of stability time
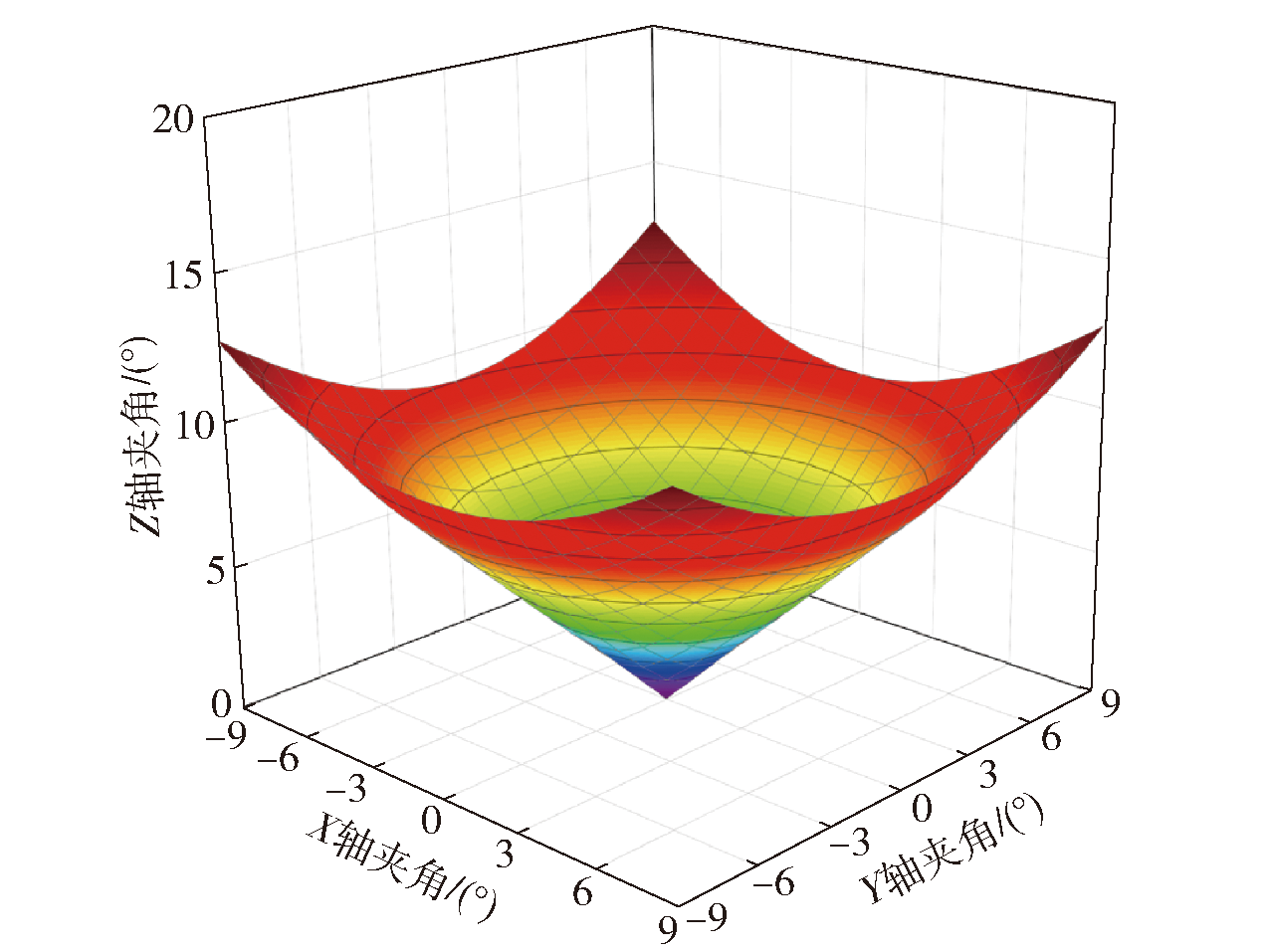
图19 空间坐标系中的指向位置
Fig.19 Pointing position in the spatial coordinate system
| [1] |
|
| [2] |
|
| [3] |
陆强. 60°二维指向镜的面阵相机几何模型标定方法[J]. 红外与毫米波学报, 2020, 39(3):356-362.
|
|
|
|
| [4] |
喻福, 苏杨, 张哲. ASO-S/HXI太阳指向镜算法研究[J]. 天文学报, 2020, 61(4):401-408.
|
|
|
|
| [5] |
丛爽, 段士奇. 基于量子卫星“墨子号”的量子测距过程仿真实验研究[J]. 系统仿真学报, 2021, 33(2):543-550.
|
|
|
|
| [6] |
孟立新, 赵丁选, 张立中. 机载激光通信稳瞄吊舱设计与跟踪精度测试[J]. 兵工学报, 2015, 36(10):94-101.
|
|
|
|
| [7] |
葛兵, 高慧斌, 余毅. 光电着舰引导系统的视轴稳定[J]. 光电精密工程, 2014, 22(6):77-83.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
doi: 10.1016/j.cja.2019.07.021 URL |
| [12] |
|
| [13] |
doi: 10.1109/TSMC.6221021 URL |
| [14] |
|
| [15] |
李仕华, 孙静, 单彦霞, 等. 空间光学镜并联指向机构优化[J]. 光学精密工程, 2019, 27(3):132-139.
|
|
|
|
| [16] |
田少乾. 新型并联指向机构控制方法研究与控制系统设计[D]. 秦皇岛: 燕山大学, 2021.
|
|
|
|
| [17] |
白智龙. 高精度指向机构位置伺服控制技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
|
|
|
|
| [18] |
王玫羽, 田大鹏, 郭立红, 等. 面向机载光电平台的串联球面机构运动学建模与验模[J]. 光学精密工程, 2020, 28(8): 1725-1732.
|
|
|
|
| [19] |
殷康程, 永强, 霍银龙, 等. 星载双反射面偏置天线可展开双轴指向机构设计[J]. 光学精密工程, 2021(3):582-591.
|
|
|
|
| [20] |
赵颖, 王旭东, 刘曦, 等. 重叠可展开天线双轴指向机构的设计及应用[J]. 空间电子技术, 2020, 17(1): 83-87.
|
|
|
|
| [21] |
杨鹏, 李晓, 赵鑫, 等. 高精度二维指向光电跟踪平台设计[J]. 航天返回与遥感, 2020, 41(4): 83-91.
|
|
|
|
| [22] |
|
| [23] |
欧阳富, 刘彦华, 孙东民. 关于重新建立空间机构自由度计算公式的探索[J]. 机械工程学报, 2003, 39(1):60-64.
|
|
|
|
| [24] |
黄真. 论机构自由度[M]. 北京: 科学出版社, 2011.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
doi: 10.3390/robotics10010001 URL |
| [29] |
刘延柱, 潘振宽, 戈新生. 多体系统动力学[M].第2版. 北京: 高等教育出版社, 2016.
|
|
|
|
| [30] |
李继成, 魏战线. 线性代数与解析几何[M].第3版. 北京: 高等教育出版社, 2019.
|
|
|
|
| [31] |
李林, 袁利, 王立, 等. 从哈勃太空望远镜剖析微振动对高性能航天器指向测量与控制系统的影响[J]. 光学精密工程, 2020, 28(11):91-100.
|
|
|
| [1] | 戴宗武, 张少甫, 刘乃强, 胡月, 王喆, 段岑薇, 孙宇哲. 用于自主导航的SAR/多普勒雷达一体化技术设计[J]. 兵工学报, 2022, 43(12): 3093-3102. |
| [2] | 李庠, 李瑞琴, 李辉, 宁峰平. 可重构单驱动3-RRR平面并联机构连杆曲线与姿态的数值解法[J]. 兵工学报, 2021, 42(5): 1074-1082. |
| [3] | 王立栋, 陈原. 绳驱动刚柔混合式波浪运动补偿机构的运动学建模与碰撞干涉检测[J]. 兵工学报, 2020, 41(4): 737-749. |
| [4] | 孙鹏, 李研彪, 郭明飞. 一种仿人肩关节的运动学和工作空间分析[J]. 兵工学报, 2019, 40(2): 384-394. |
| [5] | 谢克峰, 张合, 刘善增, 李豪杰. 海上柔性并联平台空间动力学建模与分析[J]. 兵工学报, 2017, 38(3): 512-519. |
| [6] | 李豪杰, 张合, 李珂翔, 谢克峰. 考虑铰链间隙的水面并联稳定平台动力学分析[J]. 兵工学报, 2017, 38(1): 129-134. |
| [7] | 郭浩, 冯进良, 张尧禹, 才存良, 李思琦. 药筒容积的高精度测量分析[J]. 兵工学报, 2015, 36(4): 758-762. |
| [8] | 李研彪, 李景敏, 计时鸣, 郑超, 赵章风. 一种3自由度并联拟人机械腿的动力学建模及伺服电机峰值力矩预估[J]. 兵工学报, 2014, 35(11): 1928-1936. |
| [9] | 延皓, 李长春, 张金英. 基于外部坐标测量的六自由度并联机构标定方法[J]. 兵工学报, 2013, 34(5): 649-656. |
| [10] | 赵海涛, 王成. 空中爆炸问题的高精度数值模拟研究[J]. 兵工学报, 2013, 34(12): 1536-1546. |
| [11] | 延皓, 李长春, 孙会鹏. 可移动六自由度并联机构的位姿参数辨识及误差分析[J]. 兵工学报, 2012, 33(10): 1276-1280. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4