
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (3): 240062-.doi: 10.12382/bgxb.2024.0062
Previous Articles Next Articles
CAI Hua1,*( ), ZHOU Hongce1, FU Qiang2, ZHAO Yiwu2
), ZHOU Hongce1, FU Qiang2, ZHAO Yiwu2
Received:2024-01-18
Online:2025-03-26
Contact:
CAI Hua
CLC Number:
CAI Hua, ZHOU Hongce, FU Qiang, ZHAO Yiwu. Single Object Tracking Algorithm Based on Multilayer Feature Embedding[J]. Acta Armamentarii, 2025, 46(3): 240062-.
Add to citation manager EndNote|Ris|BibTeX
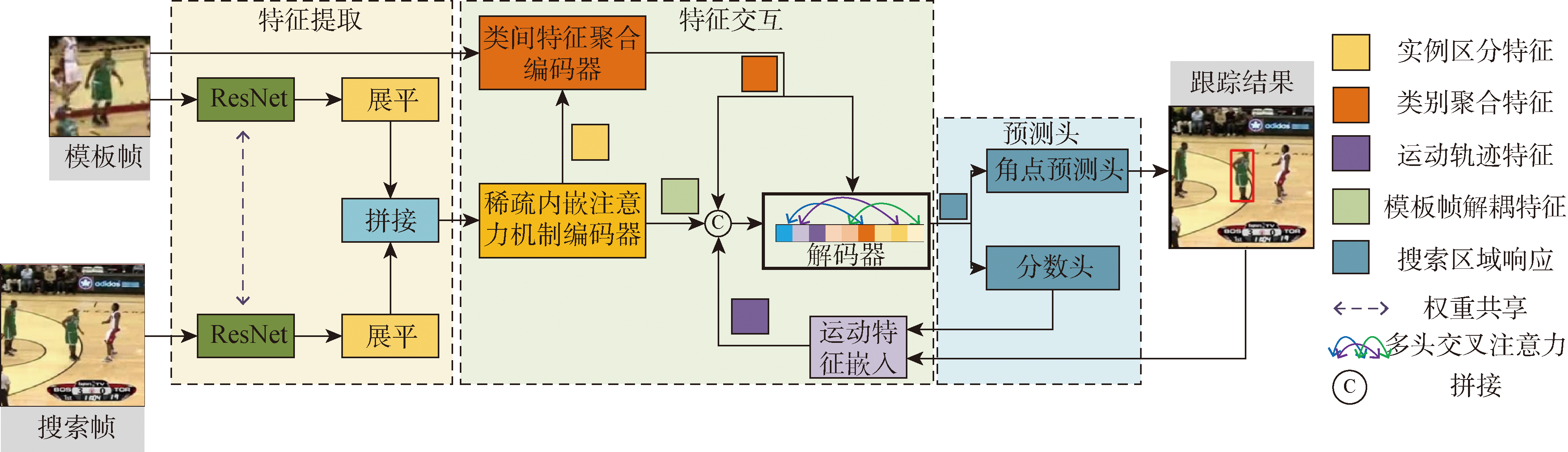
Fig.1 The overall framework of the proposed tracking algorithm

Fig.2 Sparse inner attention mechanism
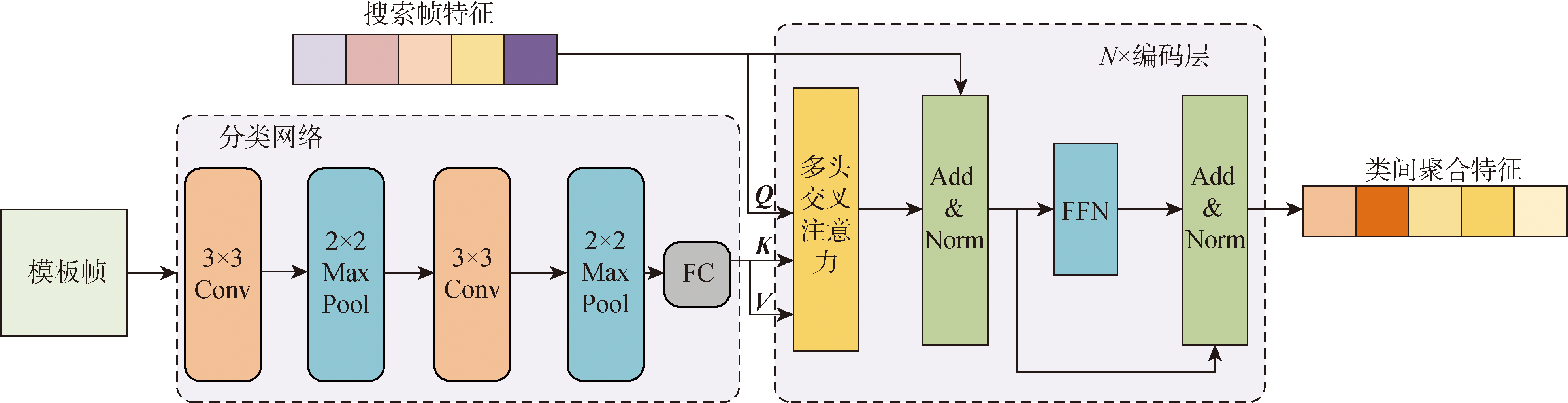
Fig.3 Category feature aggregation encoder
| 序号 | 搜索区域 | 原始特征 | 实例增强特征 | 类别聚合特征 |
|---|---|---|---|---|
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |
Table 1 Encoder output feature visualization
| 序号 | 搜索区域 | 原始特征 | 实例增强特征 | 类别聚合特征 |
|---|---|---|---|---|
| 1 | | | | |
| 2 | | | | |
| 3 | | | | |
| 4 | | | | |

Fig.4 Schematic diagram of decoder structure
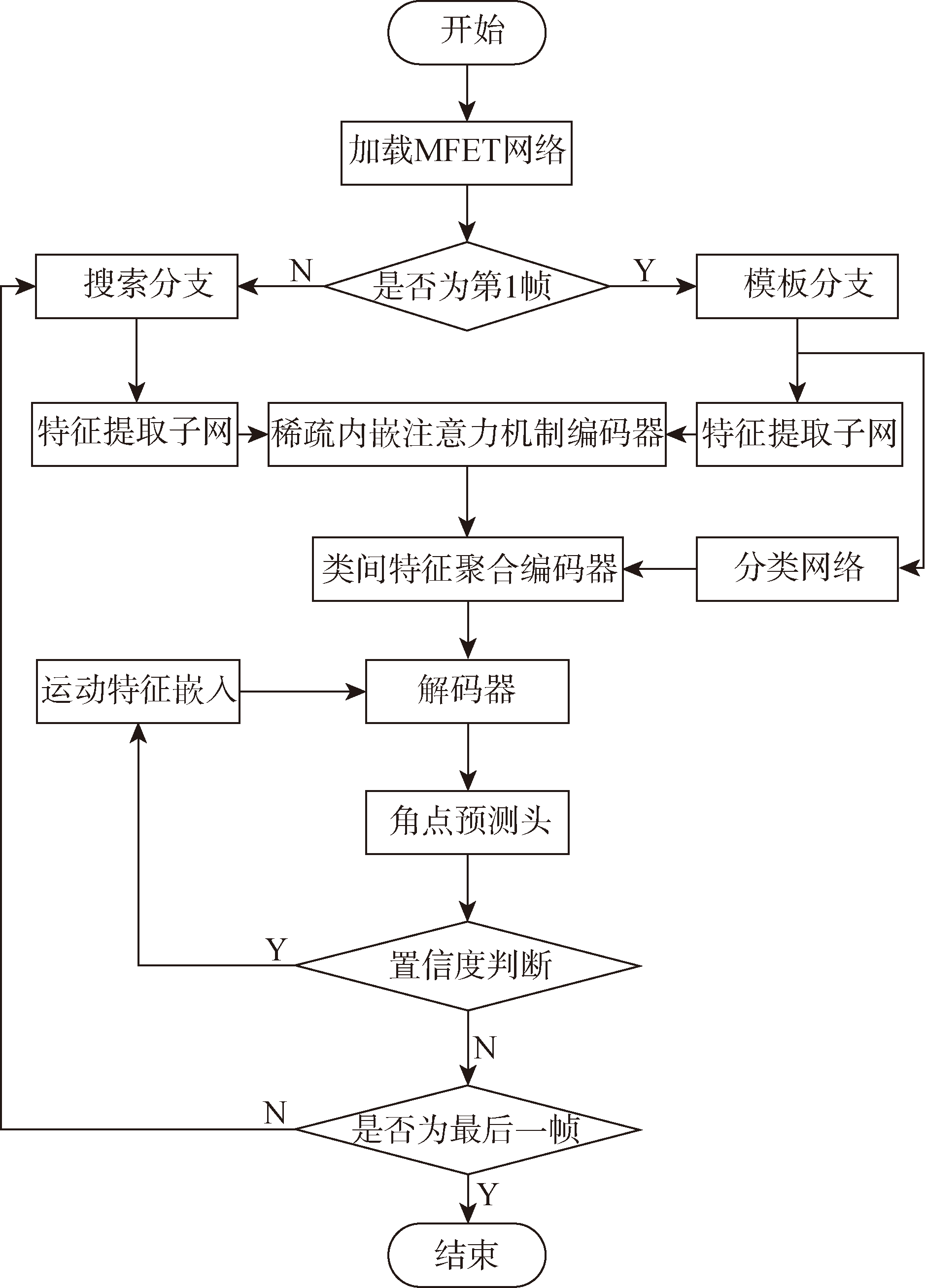
Fig.5 MFET tracking process
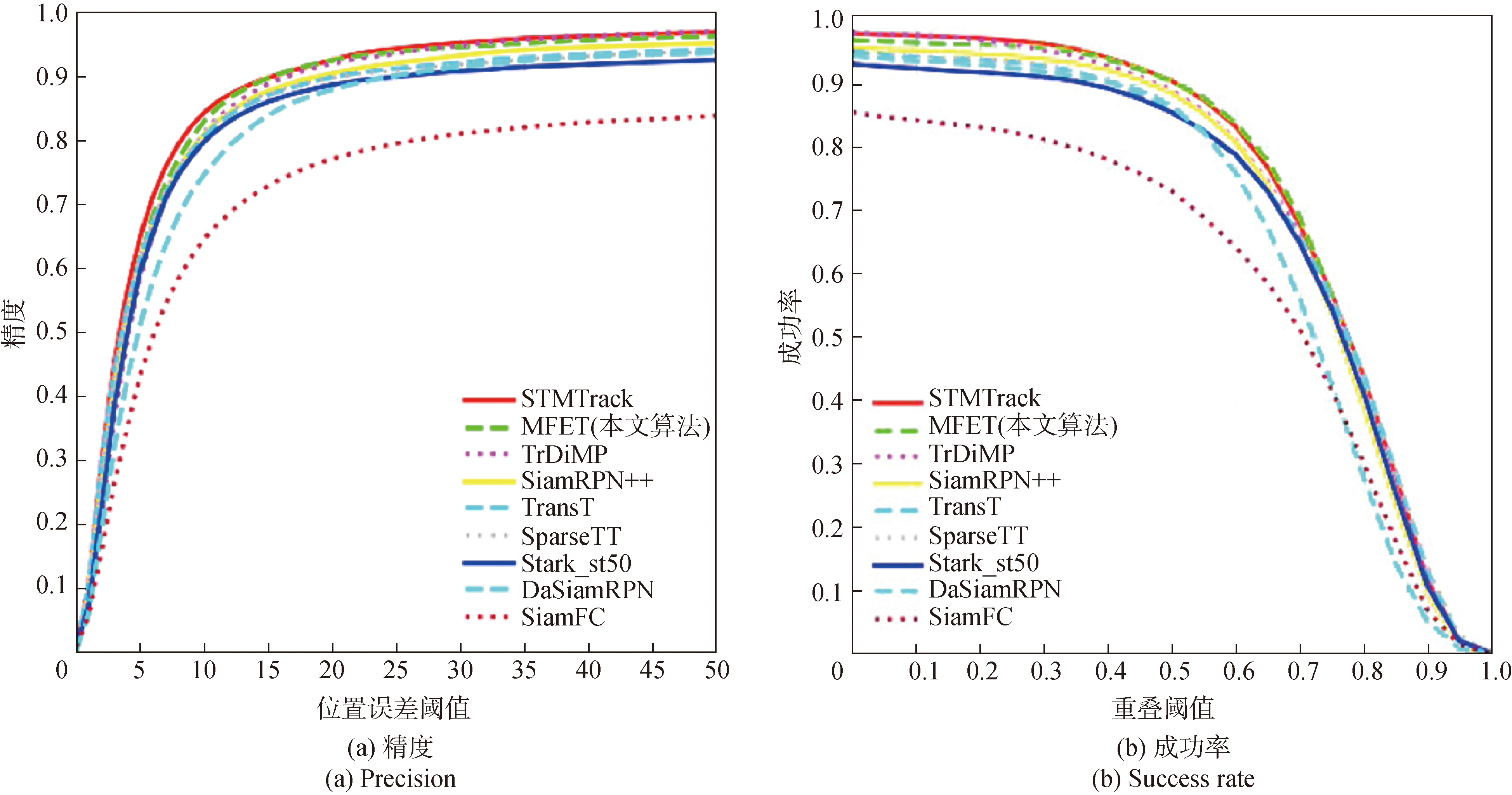
Fig.6 Quantitative experimental results on OTB100 dataset
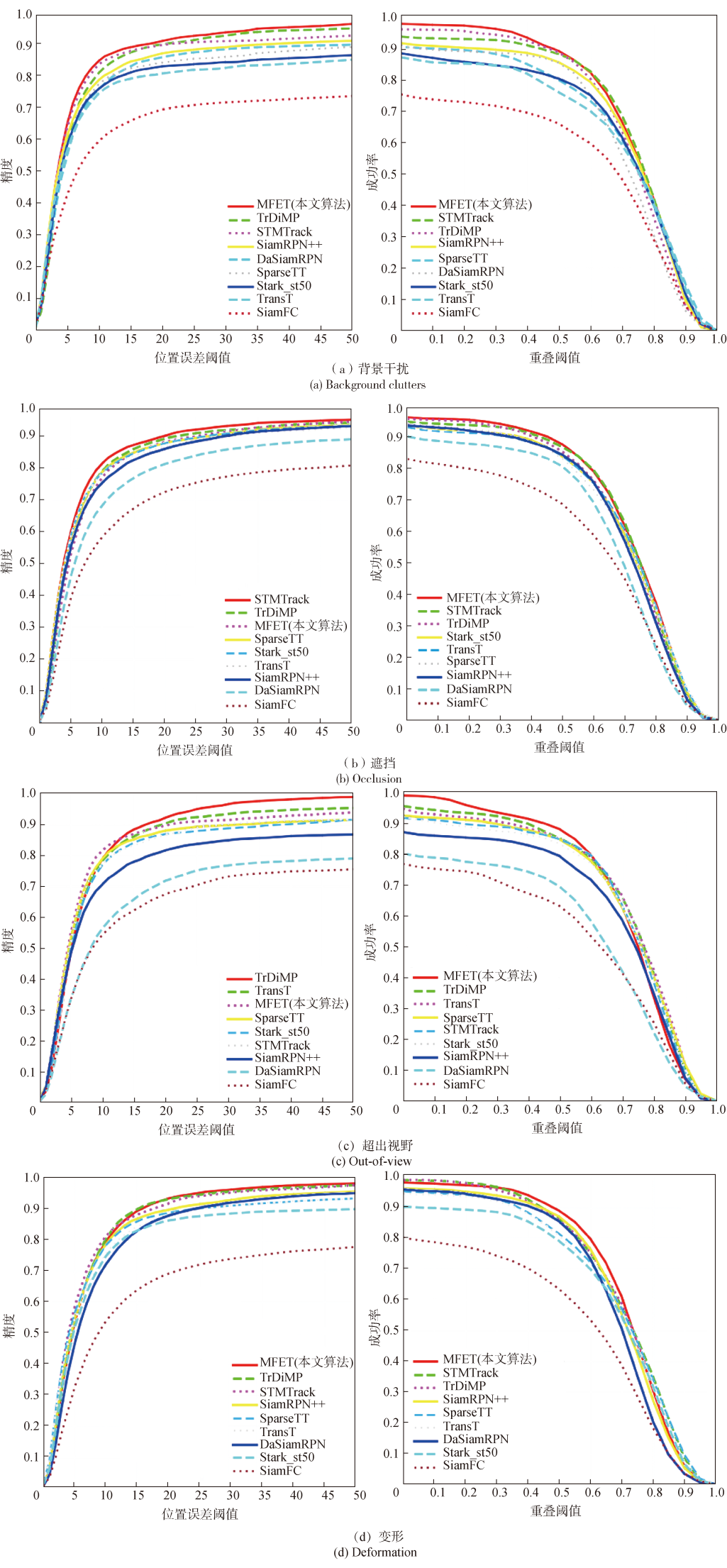
Fig.7 Comparison of accuracies and success rates of 4 attributes on OTB100 dataset
| 视频序列 | 不同算法的跟踪结果 |
|---|---|
| 自行车 | |
| 鸟 | |
| 盒子 | |
| 女孩 | |
| 液体 | |
Table 2 Qualitative results of selected video sequence on the OTB100 Dataset
| 视频序列 | 不同算法的跟踪结果 |
|---|---|
| 自行车 | |
| 鸟 | |
| 盒子 | |
| 女孩 | |
| 液体 | |
| 模型编号 | 稀疏内嵌 注意力 编码器 | 类间特征 聚合编 码器 | 运动特 征嵌入 | 成功率 | 精度 |
|---|---|---|---|---|---|
| MFET(0) | √ | 0.671 | 0.887 | ||
| MFET(1) | √ | √ | 0.694 | 0.900 | |
| MFET(2) | √ | √ | 0.692 | 0.897 | |
| MFET(3) | √ | √ | √ | 0.714 | 0.926 |
Table 3 Ablation study of each module of the proposed algorithm
| 模型编号 | 稀疏内嵌 注意力 编码器 | 类间特征 聚合编 码器 | 运动特 征嵌入 | 成功率 | 精度 |
|---|---|---|---|---|---|
| MFET(0) | √ | 0.671 | 0.887 | ||
| MFET(1) | √ | √ | 0.694 | 0.900 | |
| MFET(2) | √ | √ | 0.692 | 0.897 | |
| MFET(3) | √ | √ | √ | 0.714 | 0.926 |
| 数据集 | 评价指标 | 算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| SiamFC | SiamRPN++ | TrDiMP | TransT | SparseTT | STARK-ST101 | MFET | ||
| LaSOT | 归一化精度 | 0.420 | 0.570 | 0.730 | 0.738 | 0.740 | 0.765 | 0.768 |
| 准确率 | 0.399 | 0.493 | 0.622 | 0.690 | 0.701 | 0.714 | 0.720 | |
| AUC | 0.336 | 0.495 | 0.639 | 0.649 | 0.660 | 0.668 | 0.670 | |
| GOT-10K | 平均重叠率 | 0.348 | 0.517 | 0.688 | 0.723 | 0.693 | 0.688 | 0.691 |
| SR0.5 | 0.353 | 0.616 | 0.805 | 0.824 | 0.791 | 0.781 | 0.788 | |
| SR0.75 | 0.098 | 0.325 | 0.597 | 0.682 | 0.638 | 0.641 | 0.649 | |
| TrackingNet | 归一化精度 | 0.663 | 0.800 | 0.833 | 0.867 | 0.866 | 0.869 | 0.867 |
| 准确率 | 0.533 | 0.694 | 0.731 | 0.803 | 0.795 | - | 0.787 | |
| AUC | 0.571 | 0.733 | 0.784 | 0.814 | 0.817 | 0.820 | 0.821 | |
Table 4 Comparison of three tracking benchmarks
| 数据集 | 评价指标 | 算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| SiamFC | SiamRPN++ | TrDiMP | TransT | SparseTT | STARK-ST101 | MFET | ||
| LaSOT | 归一化精度 | 0.420 | 0.570 | 0.730 | 0.738 | 0.740 | 0.765 | 0.768 |
| 准确率 | 0.399 | 0.493 | 0.622 | 0.690 | 0.701 | 0.714 | 0.720 | |
| AUC | 0.336 | 0.495 | 0.639 | 0.649 | 0.660 | 0.668 | 0.670 | |
| GOT-10K | 平均重叠率 | 0.348 | 0.517 | 0.688 | 0.723 | 0.693 | 0.688 | 0.691 |
| SR0.5 | 0.353 | 0.616 | 0.805 | 0.824 | 0.791 | 0.781 | 0.788 | |
| SR0.75 | 0.098 | 0.325 | 0.597 | 0.682 | 0.638 | 0.641 | 0.649 | |
| TrackingNet | 归一化精度 | 0.663 | 0.800 | 0.833 | 0.867 | 0.866 | 0.869 | 0.867 |
| 准确率 | 0.533 | 0.694 | 0.731 | 0.803 | 0.795 | - | 0.787 | |
| AUC | 0.571 | 0.733 | 0.784 | 0.814 | 0.817 | 0.820 | 0.821 | |
| 算法 | 搜索区域 尺寸 | 速度/ (帧·s-1) | 浮点数/G | 参数/M |
|---|---|---|---|---|
| SiamRPN++ | 255×255 | 5.17 | 48.92 | 53.95 |
| SiamBAN | 255×255 | 23.71 | 48.84 | 53.93 |
| SiamDW | 255×255 | 52.58 | 12.90 | 2.46 |
| AiATrack | 320×320 | 31 | 9.45 | 17.95 |
| STARK-ST101 | 320×320 | 17.9 | 18.48 | 47.17 |
| TransT | 256×256 | 21.15 | 16.71 | 23.02 |
| SparseTT | 289×289 | 30.50 | 9.21 | 46.33 |
| GRM | 256×256 | 36.02 | 30.90 | 99.83 |
| SwinTrack | 384×384 | 11.92 | 61.85 | 90.96 |
| MFET(本文算法) | 320×320 | 24.41 | 22.12 | 65.75 |
Table 5 Comparison of the speeds,FLOPs and parameters
| 算法 | 搜索区域 尺寸 | 速度/ (帧·s-1) | 浮点数/G | 参数/M |
|---|---|---|---|---|
| SiamRPN++ | 255×255 | 5.17 | 48.92 | 53.95 |
| SiamBAN | 255×255 | 23.71 | 48.84 | 53.93 |
| SiamDW | 255×255 | 52.58 | 12.90 | 2.46 |
| AiATrack | 320×320 | 31 | 9.45 | 17.95 |
| STARK-ST101 | 320×320 | 17.9 | 18.48 | 47.17 |
| TransT | 256×256 | 21.15 | 16.71 | 23.02 |
| SparseTT | 289×289 | 30.50 | 9.21 | 46.33 |
| GRM | 256×256 | 36.02 | 30.90 | 99.83 |
| SwinTrack | 384×384 | 11.92 | 61.85 | 90.96 |
| MFET(本文算法) | 320×320 | 24.41 | 22.12 | 65.75 |
| 序列 | 跟踪结果 |
|---|---|
| 飞机-9 | |
| 飞机-13 | |
| 坦克-14 | |
| 坦克-16 | |
Table 6 LaSOT dataset simulation test
| 序列 | 跟踪结果 |
|---|---|
| 飞机-9 | |
| 飞机-13 | |
| 坦克-14 | |
| 坦克-16 | |
| 序列 | 跟踪结果 |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 | |
Table 7 Real scene verification results
| 序列 | 跟踪结果 |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| [1] |
陆康亮, 薛俊, 陶重犇. 融合空间掩膜预测与点云投影的多目标跟踪[J]. 光电工程, 2022, 49(9):49-63.
|
|
|
|
| [2] |
才华, 寇婷婷, 杨依宁, 等. 基于轨迹优化的三维车辆多目标跟踪[J/OL]. 吉林大学学报(工学版), 2023(2023-05-09)[2024-01-11].https://doi.org/10.13229/j.cnki.Jdxbgxb.20221373.
|
|
|
|
| [3] |
姜珊, 底晓强, 韩成. 融合时空特性的孪生网络视觉跟踪[J]. 兵工学报, 2021, 42(9):1940-1950.
doi: 10.3969/j.issn.1000-1093.2021.09.015 |
|
doi: 10.3969/j.issn.1000-1093.2021.09.015 |
|
| [4] |
梁杰, 李磊, 任君, 等. 基于深度学习的红外图像遮挡干扰检测方法[J]. 兵工学报, 2019, 40(7):1401-1410.
doi: 10.3969/j.issn.1000-1093.2019.07.009 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.009 |
|
| [5] |
陈瑞东, 秦会斌. 多特征融合与Kalman滤波的CAMShift跟踪算法[J]. 计算机仿真, 2024, 41(3):200-205,236.
|
|
|
|
| [10] |
孙家伟. 基于域不变投影的全天候目标跟踪方法研究[D]. 南京: 南京邮电大学, 2023.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
才华, 王学伟, 付强, 等. 基于动态模板更新的孪生网络目标跟踪算法[J]. 吉林大学学报(工学版), 2022, 52(5):1106-1116.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
刘广文, 谢欣月, 付强, 等. 基于时空模板焦点注意的Transformer目标跟踪算法[J/OL]. 吉林大学学报(工学版), 2024(2023-10-18)[2024-01-11].https://doi.org/10.13229/j.cnki.Jdxbgxb.20230544.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
doi: 10.1109/TPAMI.2014.2388226 pmid: 26353130 |
| [30] |
|
| [6] |
阴国华, 齐咏生, 刘利强, 等. 基于Ghost-TiFPN的轻量化快速目标跟踪算法[J]. 兵工学报, 45(5):1703-1716.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [1] | YANG Xuqi, TAN Qifan, SU Hang, TAN Hao. Guidance-Tracker:An Adaptive UAV Siamese Tracker for Visual Guidance [J]. Acta Armamentarii, 2025, 46(2): 240284-. |
| [2] | QIAO Xinbo, ZHAO Yongqiang, ZHANG Jingcheng. Object Tracking Based on Spatial-polarization Aliasing for Infrared Polarization Video [J]. Acta Armamentarii, 2024, 45(9): 3274-3287. |
| [3] | XIONG Guangming, LUO Zhen, SUN Dong, TAO Junfeng, TANG Zeyue, WU Chao. Object Detection and Tracking for Unmanned Vehicles Based on Fusion of Infrared Camera and MMW Radar in Smoke-obscured Environment [J]. Acta Armamentarii, 2024, 45(3): 893-906. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||