
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (9): 3297-3306.doi: 10.12382/bgxb.2023.0738
Previous Articles Next Articles
ZENG Xin, XIAN Sujie, WANG Kang, SI Peng, WU Zhilin*
Received:2023-08-10
Online:2023-10-28
Contact:
WU Zhilin
CLC Number:
ZENG Xin, XIAN Sujie, WANG Kang, SI Peng, WU Zhilin. A Random Error Compensation Method for MEMS Gyroscope Based on Improved EMD and ARMA[J]. Acta Armamentarii, 2024, 45(9): 3297-3306.
Add to citation manager EndNote|Ris|BibTeX
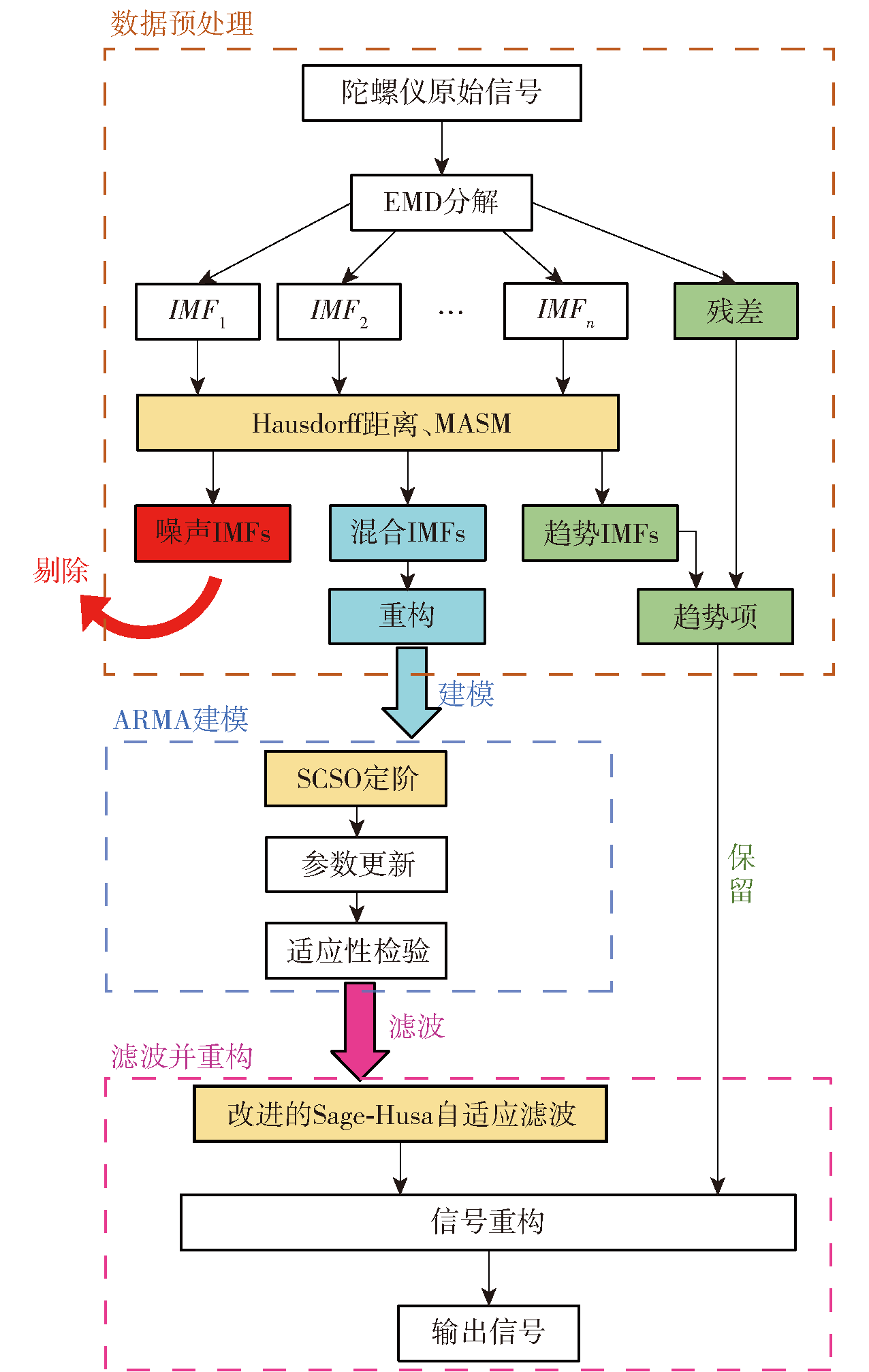
Fig.1 Flowchart of the proposed method
| Xk | Vk | A | B |
|---|---|---|---|
| $\left[\begin{array}{ll}\hat{x}_{k} & \hat{x}_{k-1}\end{array}\right]^{\mathrm{T}}$ | [ak ak-1]T |
Table 1 Parameters of the equation of state
| Xk | Vk | A | B |
|---|---|---|---|
| $\left[\begin{array}{ll}\hat{x}_{k} & \hat{x}_{k-1}\end{array}\right]^{\mathrm{T}}$ | [ak ak-1]T |
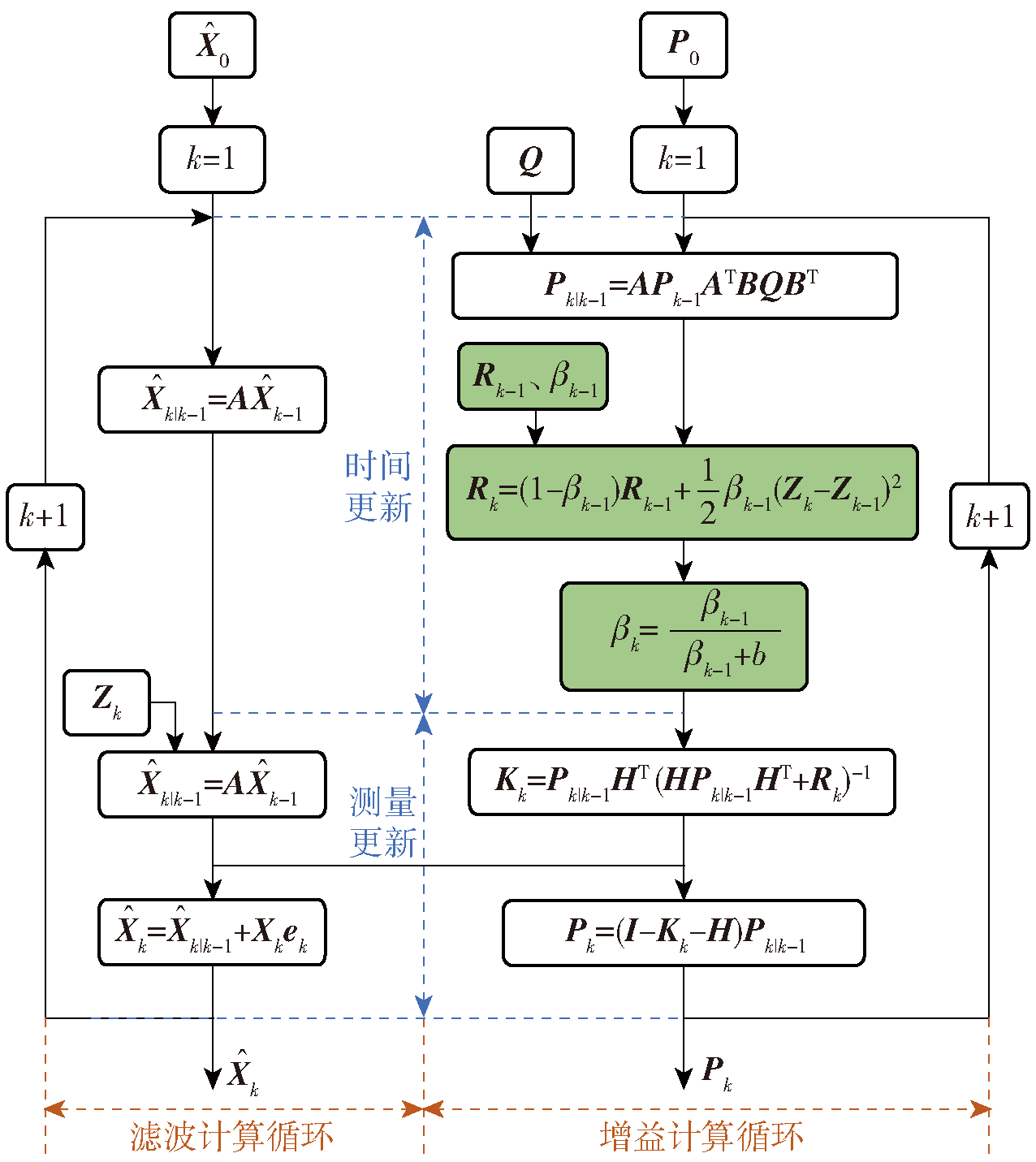
Fig.2 Loop and update process of AKF
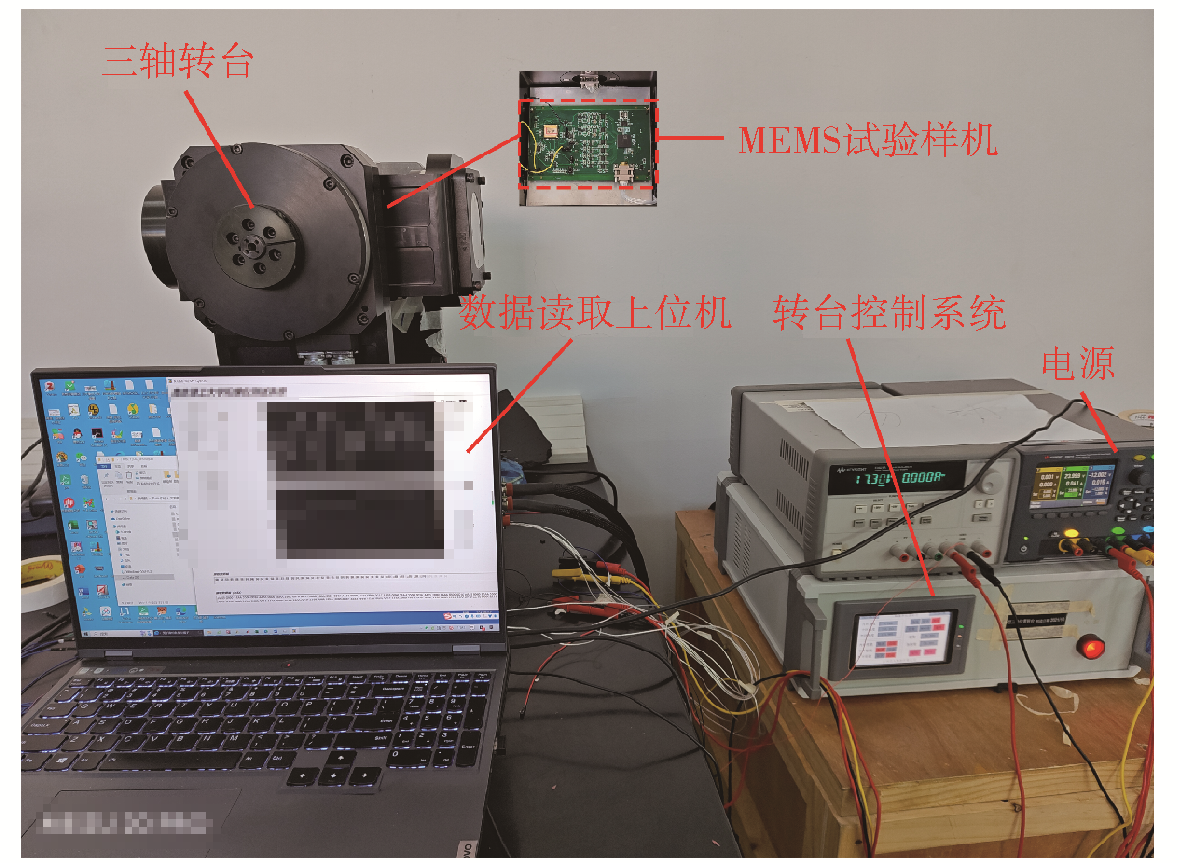
Fig.3 MEMS experimental platform
| 参数 | 数值 |
|---|---|
| 量程/(°) | ±200 |
| 标度因数/(LSB·((°)·s-1)) -1 | 210 |
| 角增益 | 0.3208 |
| 质量块/mg | 0.2315 |
| 电容量/pf | 0.4377 |
Table 2 Parameters of MEMS gyroscope
| 参数 | 数值 |
|---|---|
| 量程/(°) | ±200 |
| 标度因数/(LSB·((°)·s-1)) -1 | 210 |
| 角增益 | 0.3208 |
| 质量块/mg | 0.2315 |
| 电容量/pf | 0.4377 |
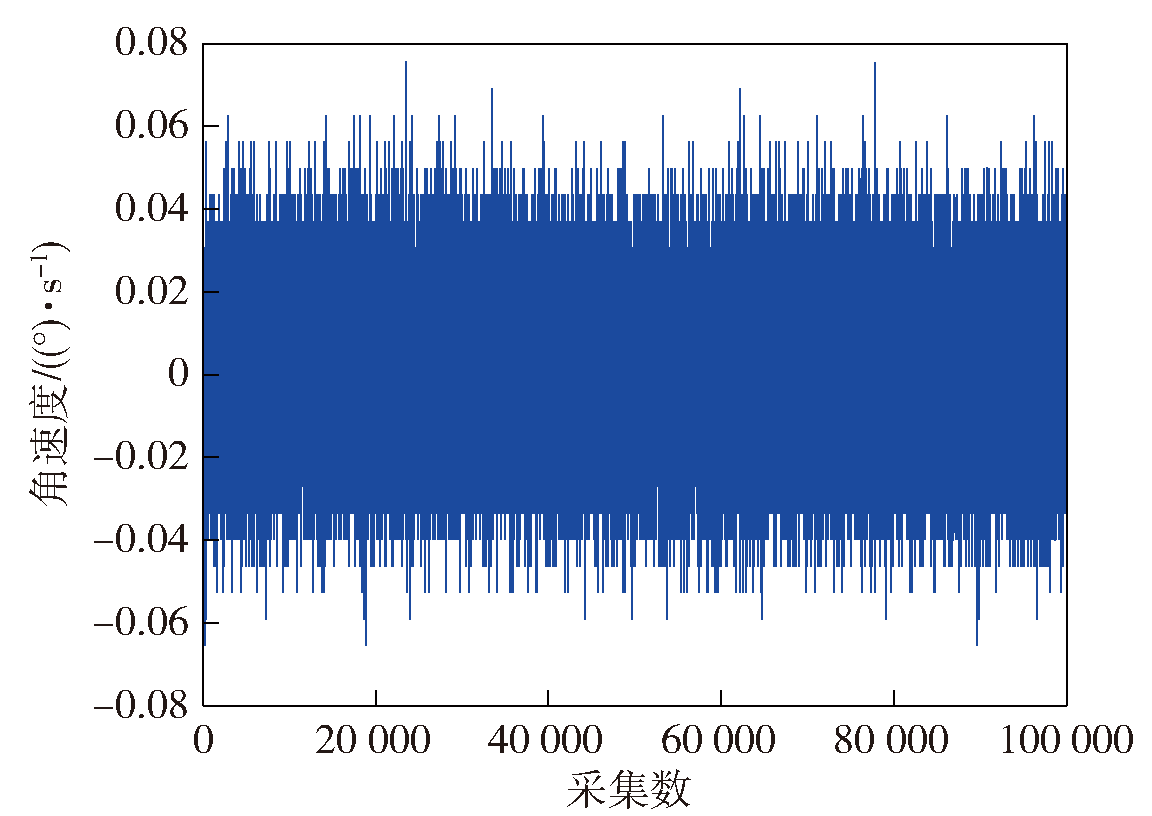
Fig.4 Static data for the x-axis of gyroscope
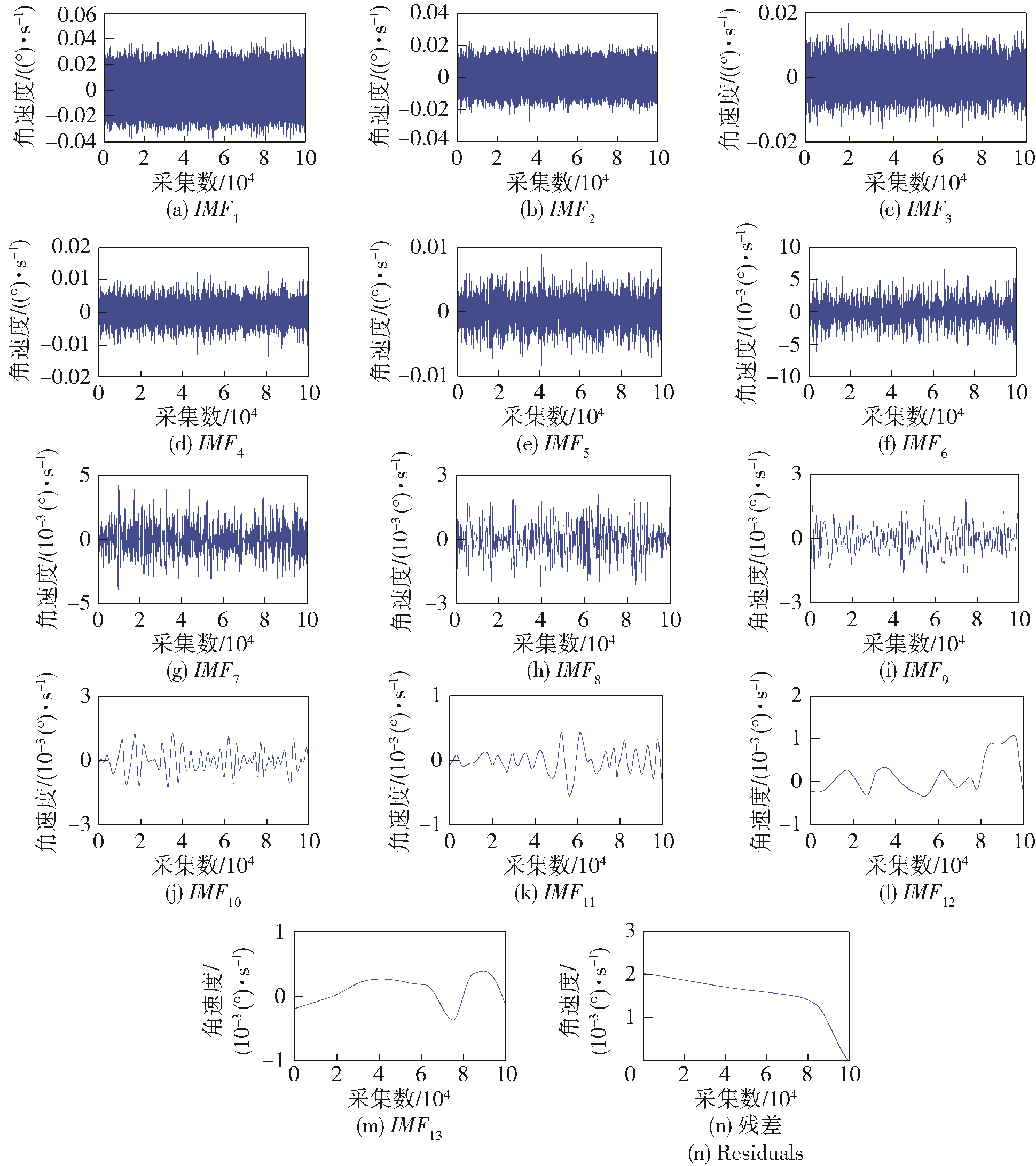
Fig.5 Each IMF and residuals obtained by EMD
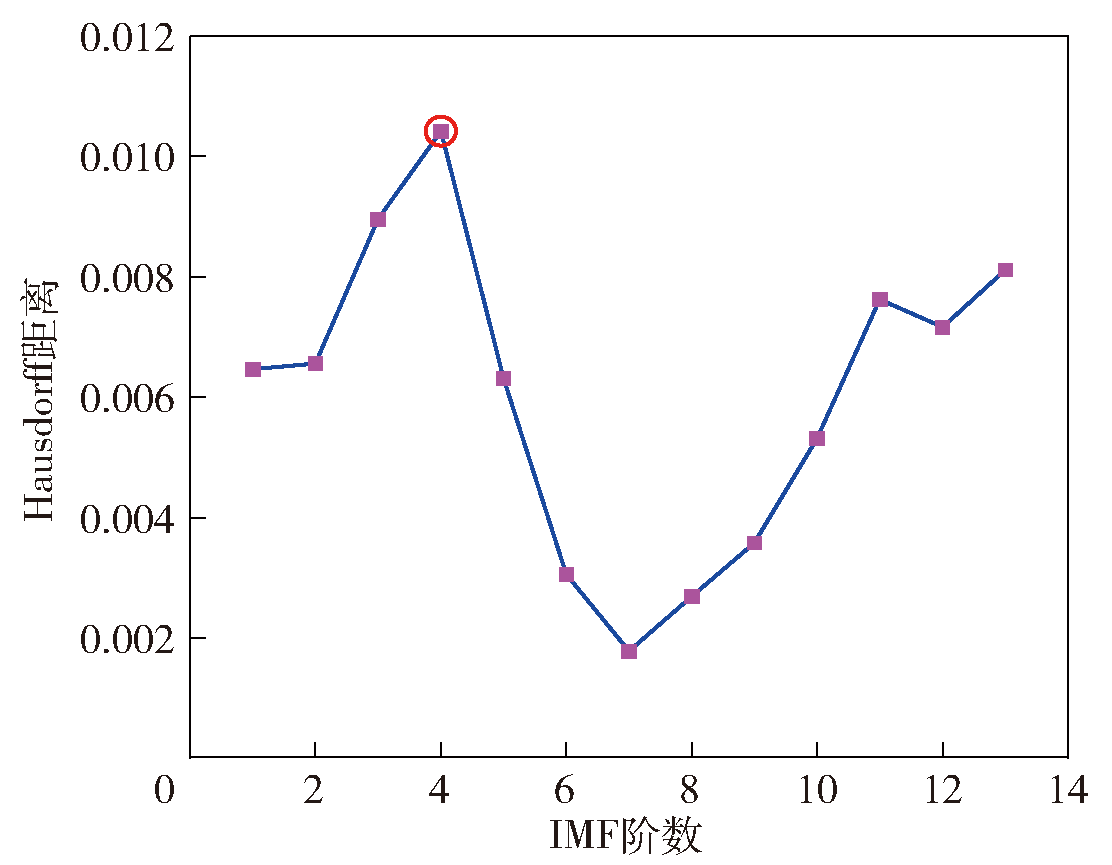
Fig.6 Hausdorff distance between original signal and each IMF
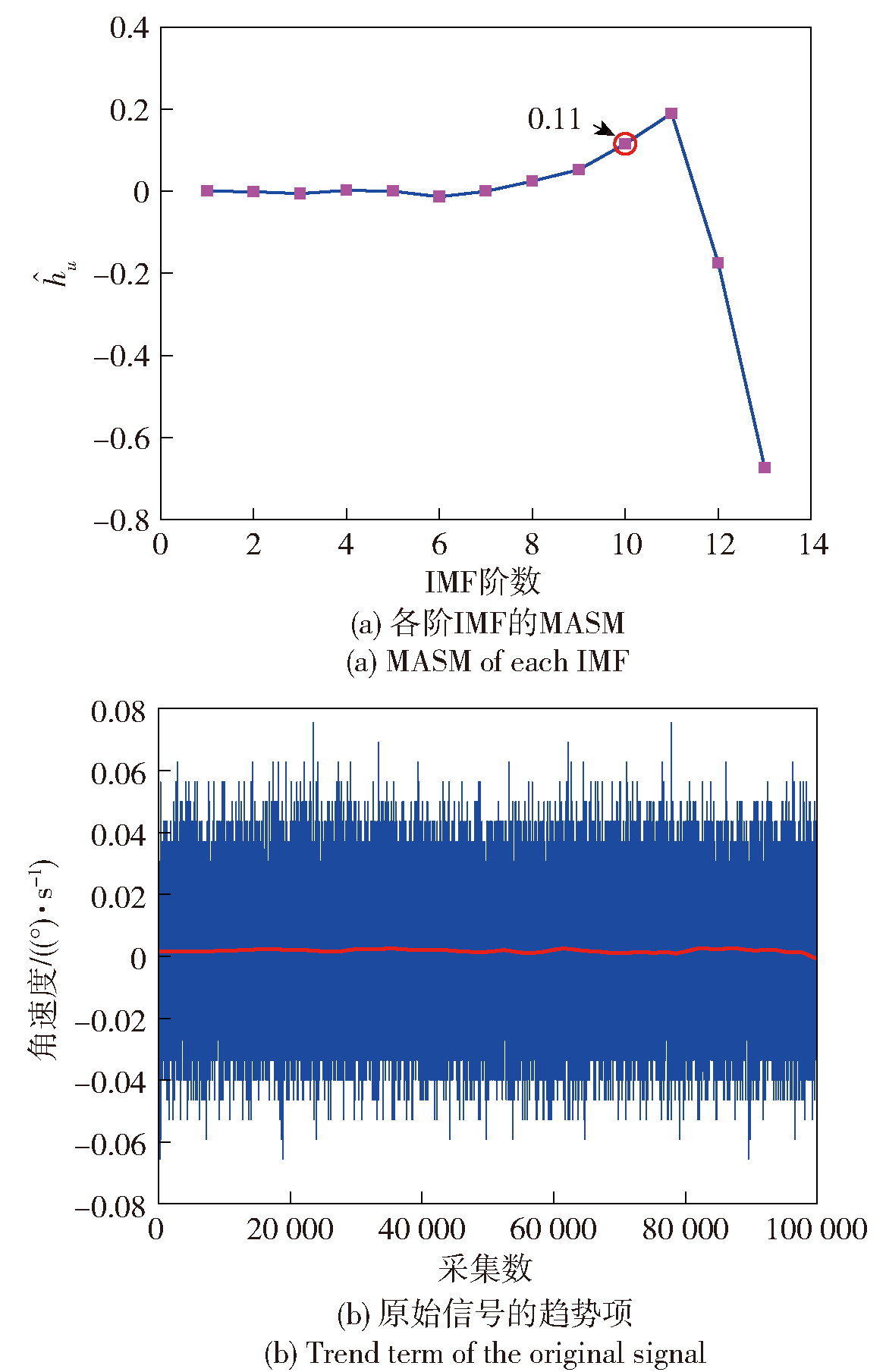
Fig.7 Extracting trend term based on MASM
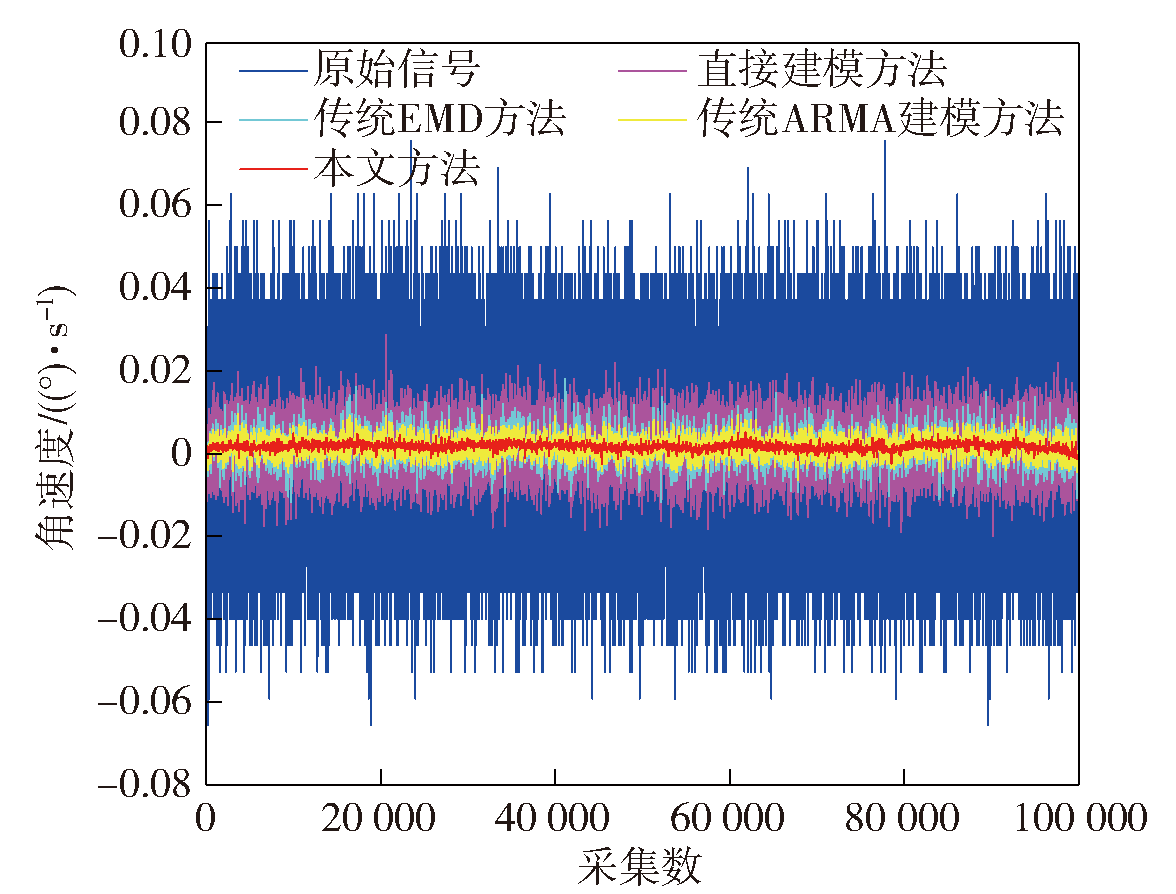
Fig.8 Comparison of compensation results in static test
| 原始信号与方法 | RMSE/((°)·s-1) | SD/((°)·s-1) |
|---|---|---|
| 原始信号 | 0.0161 | 1.6047×10-2 |
| 直接建模方法 | 0.0050 | 4.9900×10-3 |
| 传统EMD方法 | 0.0040 | 3.6415×10-3 |
| 传统ARMA建模方法 | 0.0029 | 2.3747×10-3 |
| 本文方法 | 0.0019 | 8.2046×10-4 |
Table 3 Static compensation results of each scheme
| 原始信号与方法 | RMSE/((°)·s-1) | SD/((°)·s-1) |
|---|---|---|
| 原始信号 | 0.0161 | 1.6047×10-2 |
| 直接建模方法 | 0.0050 | 4.9900×10-3 |
| 传统EMD方法 | 0.0040 | 3.6415×10-3 |
| 传统ARMA建模方法 | 0.0029 | 2.3747×10-3 |
| 本文方法 | 0.0019 | 8.2046×10-4 |
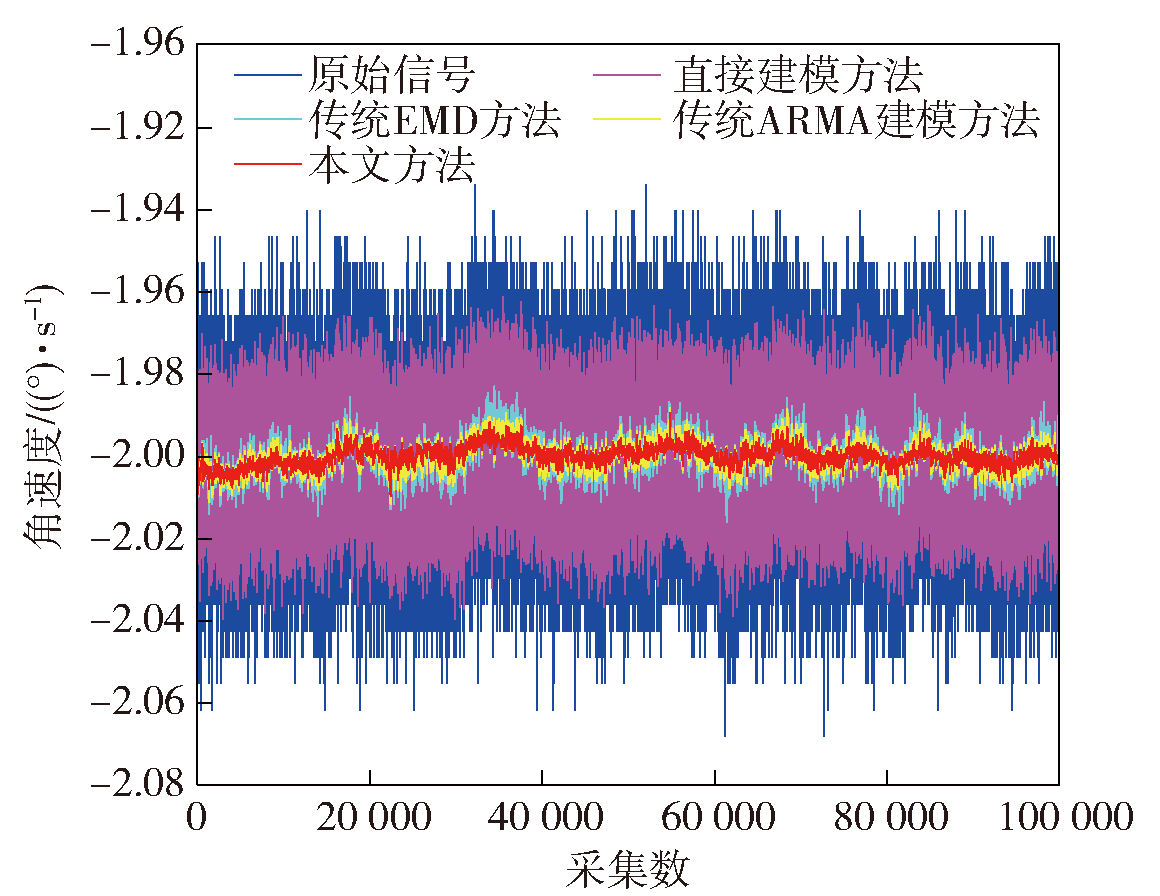
Fig.9 Comparison of compensation results in dynamic test
| 项目 | RMSE/((°)·s-1) | SNR/dB |
|---|---|---|
| 原始信号 | 0.1345 | 23.4445 |
| 直接建模方法 | 0.0123 | 45.5609 |
| 传统EMD方法 | 0.0046 | 52.8295 |
| 传统ARMA建模方法 | 0.0034 | 55.3855 |
| 本文方法 | 0.0023 | 58.6109 |
Table 4 Comparison of dynamic compensation results
| 项目 | RMSE/((°)·s-1) | SNR/dB |
|---|---|---|
| 原始信号 | 0.1345 | 23.4445 |
| 直接建模方法 | 0.0123 | 45.5609 |
| 传统EMD方法 | 0.0046 | 52.8295 |
| 传统ARMA建模方法 | 0.0034 | 55.3855 |
| 本文方法 | 0.0023 | 58.6109 |
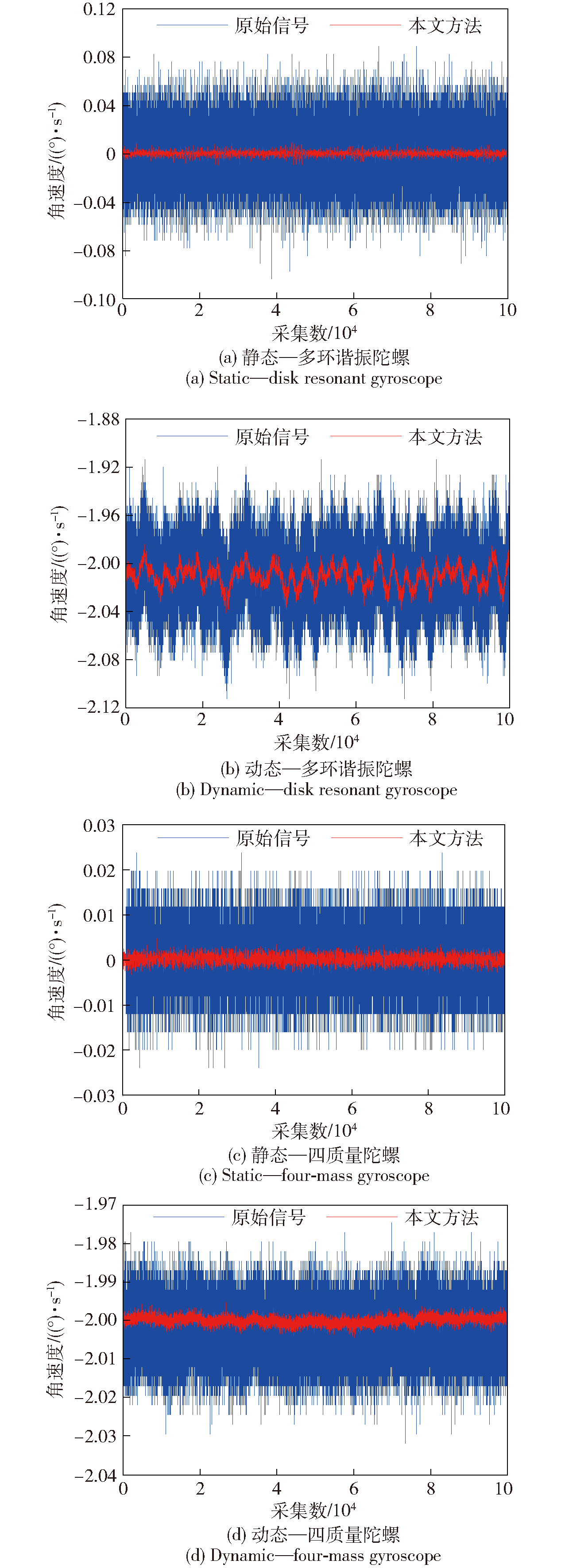
Fig.10 Experimental results of disk resonant gyroscope and four-mass gyroscope
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
丁明宽, 石志勇, 韩兰懿, 等. 基于EMD-DFA-小波阈值的MEMS陀螺信号去噪方法[J]. 火炮发射与控制学报, 2021, 42(2): 50-56.
|
|
|
|
| [6] |
|
| [7] |
杨菊花, 刘洋, 陈光武, 等. 基于改进EMD的微机械陀螺随机误差建模方法[J]. 仪器仪表学报, 2019, 40(12):196-204.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
万芯炜, 王晶, 杨辉, 等. BP神经网络结合粒子群优化卡尔曼滤波的MEMS陀螺随机误差补偿方法[J]. 兵工学报, 2023, 44(2): 556-565.
doi: 10.12382/bgxb.2022.0110 |
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
李杨, 胡柏青, 覃方君, 等. MEMS陀螺的抗野值自适应滤波降噪方法[J]. 压电与声光, 2015, 37(4):590-594.
|
|
|
| [1] | LIU Jinrong, LI Wei. Non-magnetic Heating and High-precision Temperature Control of the Alkali-metal Vapor Cell in SERF Atomic Spin Gyroscope [J]. Acta Armamentarii, 2024, 45(9): 3288-3296. |
| [2] | WANG Yong’an, LI Dongguang, WU Hao, LIU Yang. An Adaptive Filtering-disturbance Observer-based State Estimation Algorithm for Large Ships [J]. Acta Armamentarii, 2024, 45(7): 2318-2328. |
| [3] | LIU Bin, LI Xuemei. A Self-adaptive Dual Radius Filtering Algorithm Based on LiDAR Point Cloud [J]. Acta Armamentarii, 2023, 44(9): 2768-2777. |
| [4] | WAN Xinwei, WANG Jing, YANG Hui, LI Yi, ZHANG Yuanzai, WANG Lu. A Random Error Compensation Method of MEMS Gyroscope Based on BP Neural Network Combined with PSO-Optimized Kalman Filter [J]. Acta Armamentarii, 2023, 44(2): 556-565. |
| [5] | SUN Ning, XIA Yan, CHENG Xingqing. Optimal Design of High-precision Temperature Control System for FOG Detection [J]. Acta Armamentarii, 2022, 43(4): 910-918. |
| [6] | XU Baoxiang, XIONG Zhi, HUANG Jixun, YU Haicheng. Effect of Adhesive on the Zero Drift of Interferometric Fiber-optic Gyroscope in Low Temperature Environment [J]. Acta Armamentarii, 2021, 42(6): 1223-1229. |
| [7] | ZHENG Rui, LI Fangdong, ZHAO Chuanchao. Research on Sensitivity and Resolution of Superfluid Gyroscope [J]. Acta Armamentarii, 2020, 41(7): 1457-1463. |
| [8] | YANG Guanjinzi, LI Jianchen, HUANG Hai, GUO Linna. Non-turntable Field-calibration Method for Gyroscope Based on Optimal Analysis [J]. Acta Armamentarii, 2020, 41(3): 577-584. |
| [9] | ZHENG Rui, ZHAO Wei, FANG Ming-xing, DU You-wu. Noise Suppression Method for Superfluid Gyroscope Based on Multiple-turn Circling Structure [J]. Acta Armamentarii, 2017, 38(7): 1330-1335. |
| [10] | WANG Jie, XIONG Zhi, XING Li, DAI Yi-jie, HUA Bing, LIU Jian-ye. Online Calibration of IMU errors of Inertial Navigation System Based on Innovation-based Adaptive Filtering [J]. Acta Armamentarii, 2016, 37(7): 1203-1213. |
| [11] | LIU Ming-yong, ZHU Li, DONG Hai-xia. Research on Gyroscope Array Based on Kalman Filter [J]. Acta Armamentarii, 2016, 37(2): 272-278. |
| [12] | ZHAO Hui, XIONG Zhi, SHI Li-juan, YU Feng, LIN Ai-jun. A SINS/STAR Integrated Navigation Method Based on Online Estimation of Gyroscope Error in Inertial Coordinate [J]. Acta Armamentarii, 2016, 37(12): 2259-2267. |
| [13] | LIU Wang-sheng, PAN Hai-peng, LI Ya-an. A Fuzzy Adaptive Algorithm for Maneuvering Target Based on Current Statistical Model [J]. Acta Armamentarii, 2016, 37(11): 2037-2043. |
| [14] | TANG Xia-qing, CHENG Xu-wei, GAO Jun-qiang. Hybrid Theoretical Variance Analysis for Random Error Properties of Optic Gyroscope [J]. Acta Armamentarii, 2015, 36(9): 1688-1695. |
| [15] | CHEN He, ZHANG Zhi-li, ZHOU Zhao-fa, ZHAO Xiao-feng. Omni-bearing Fast Pre-orientation of Pendulous Gyroscope Based on Period-amplitude Measuring [J]. Acta Armamentarii, 2015, 36(8): 1458-1465. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||