
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (4): 1117-1128.doi: 10.12382/bgxb.2022.1089
Previous Articles Next Articles
PAN Zuodong1,2, ZHOU Yue1,*( ), GUO Wei2,3,**(), XU Gaofei2, SUN Yu2
), GUO Wei2,3,**(), XU Gaofei2, SUN Yu2
Received:2022-11-23
Online:2024-04-30
Contact:
ZHOU Yue, GUO Wei
CLC Number:
PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm[J]. Acta Armamentarii, 2024, 45(4): 1117-1128.
Add to citation manager EndNote|Ris|BibTeX
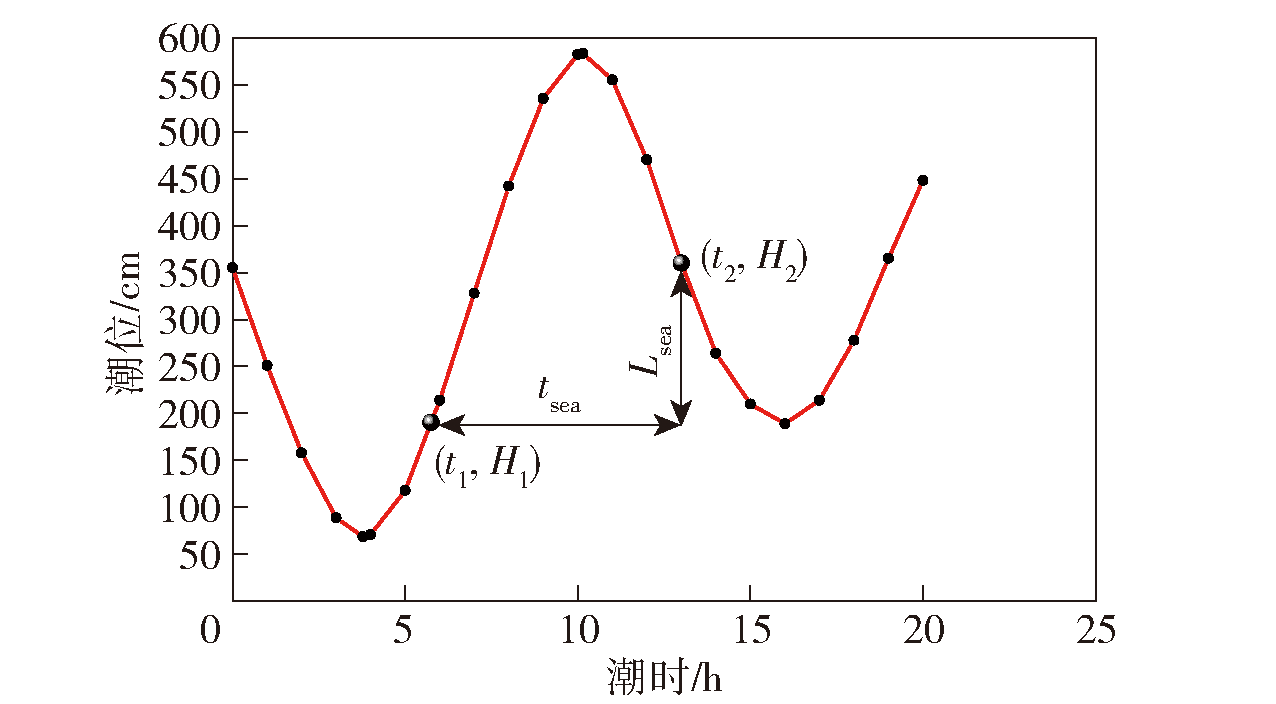
Fig.1 Tidal data
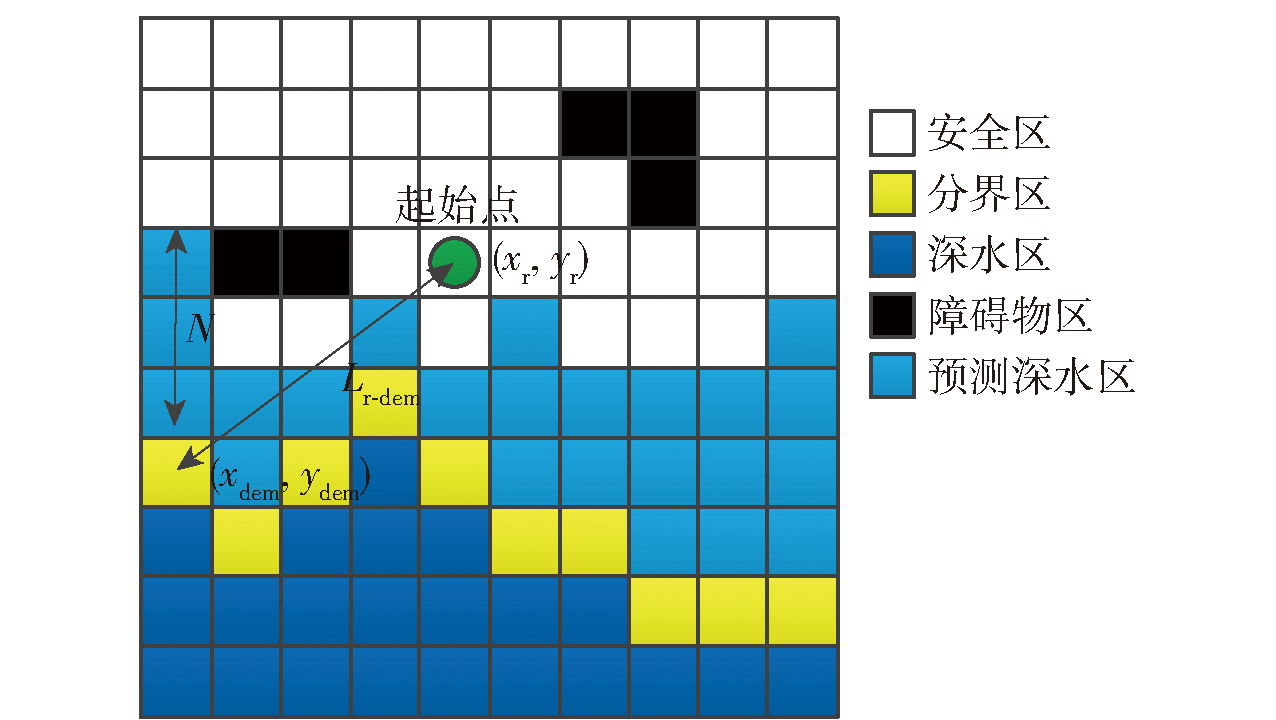
Fig.2 Tidal flat prediction model

Fig.3 CB-RRT* algorithm flowchart
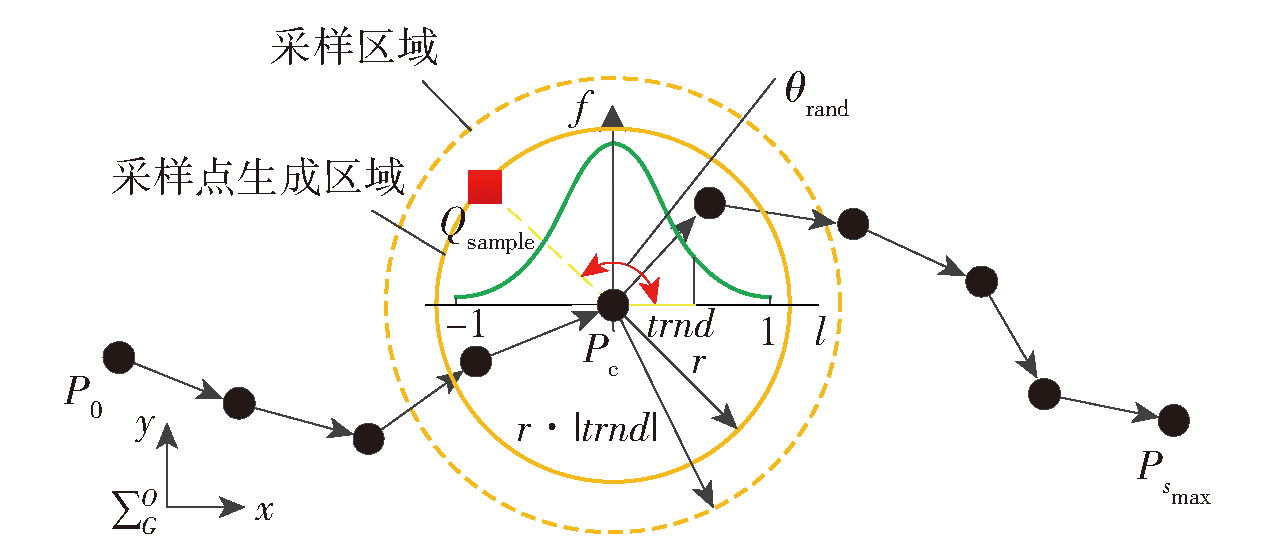
Fig.4 Cauchy probability density function sampling
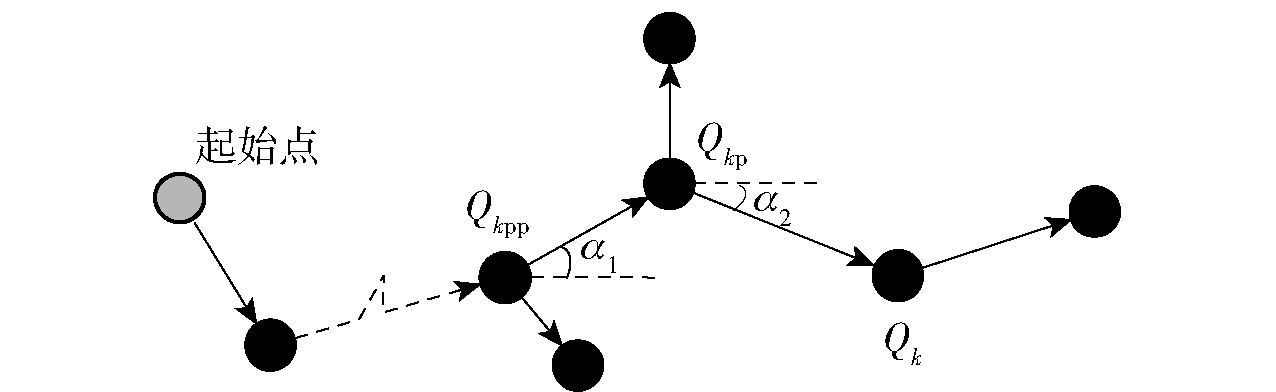
Fig.5 Node angle correspondence
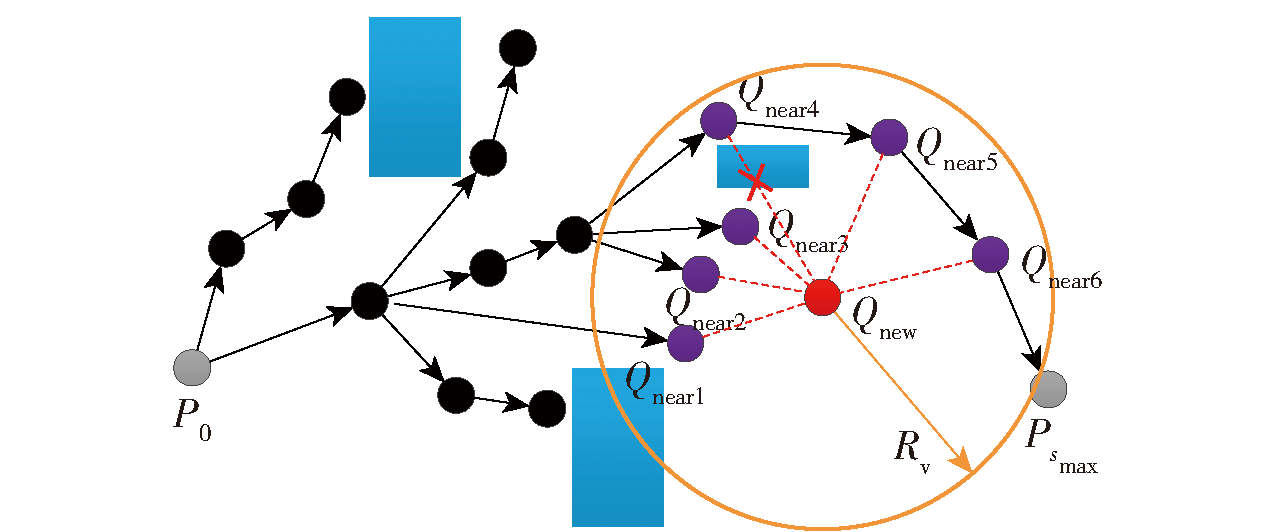
Fig.6 Setting the parent node of new node
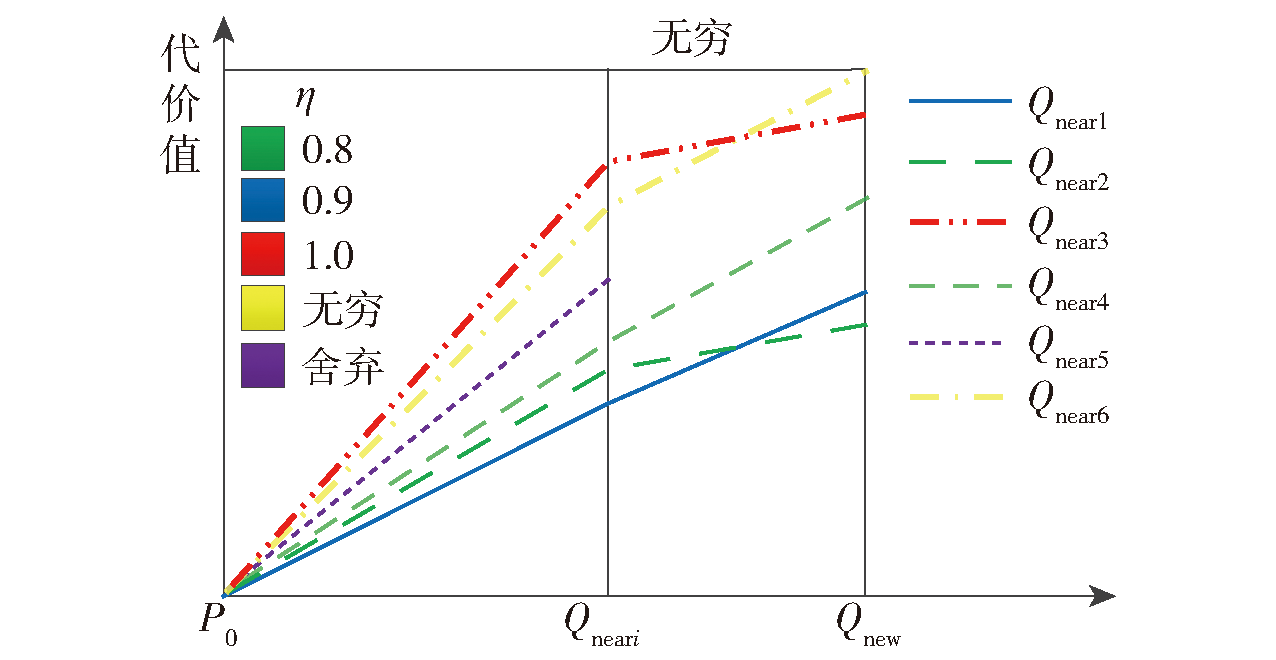
Fig.7 Cost function value
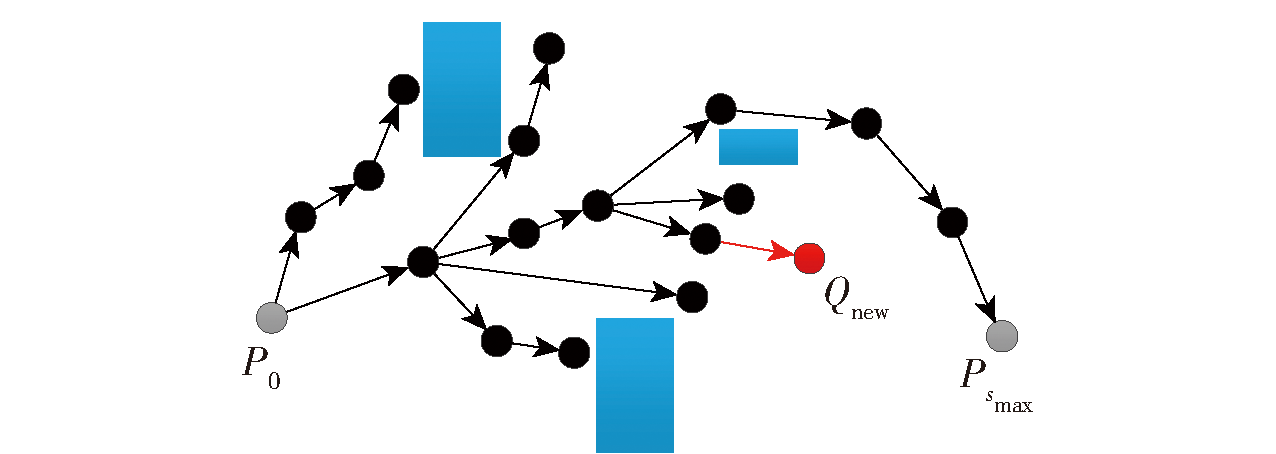
Fig.8 Update parent node
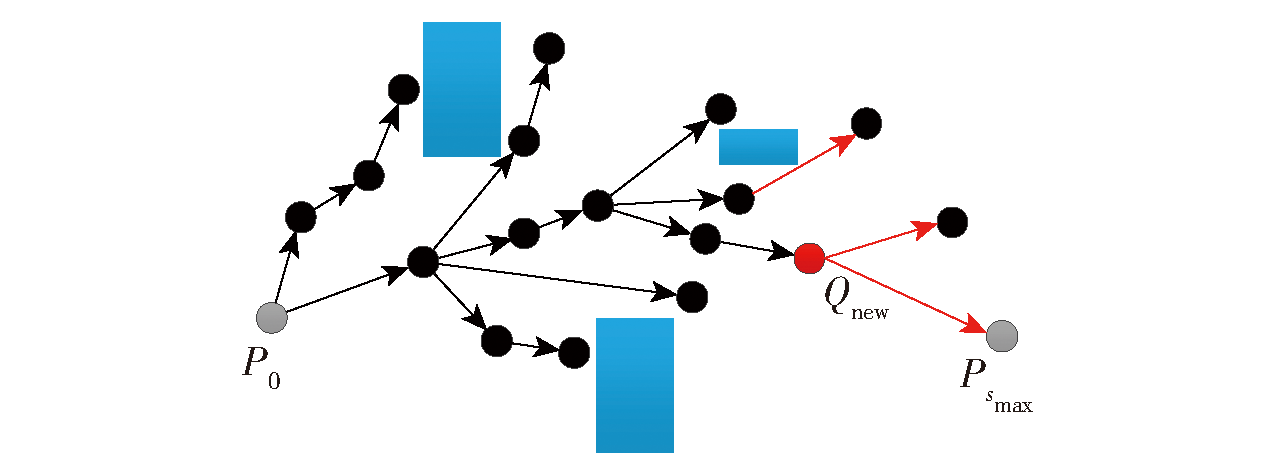
Fig.9 Rewiring
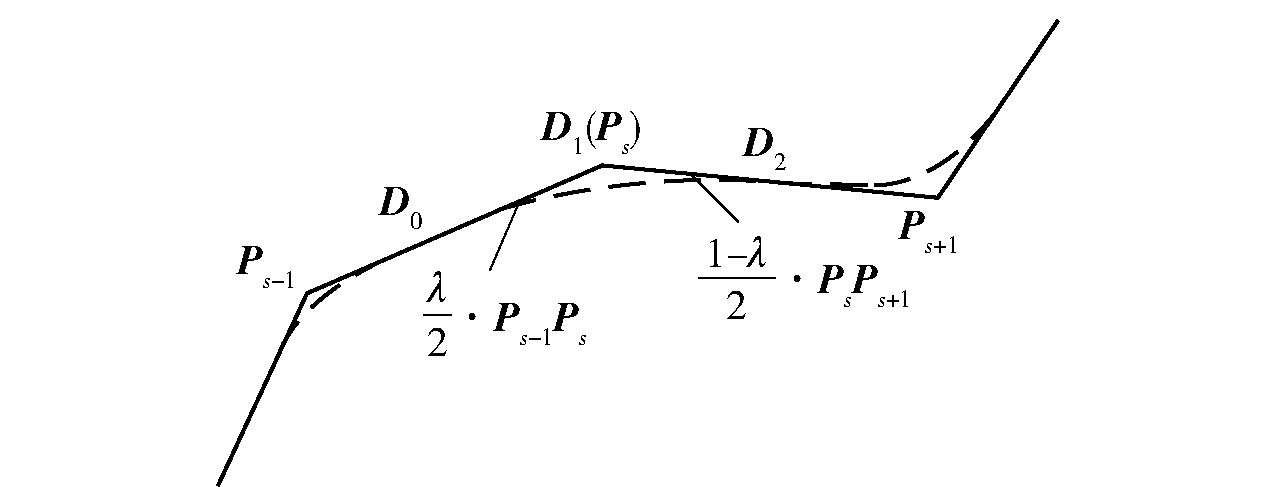
Fig.10 Local path model
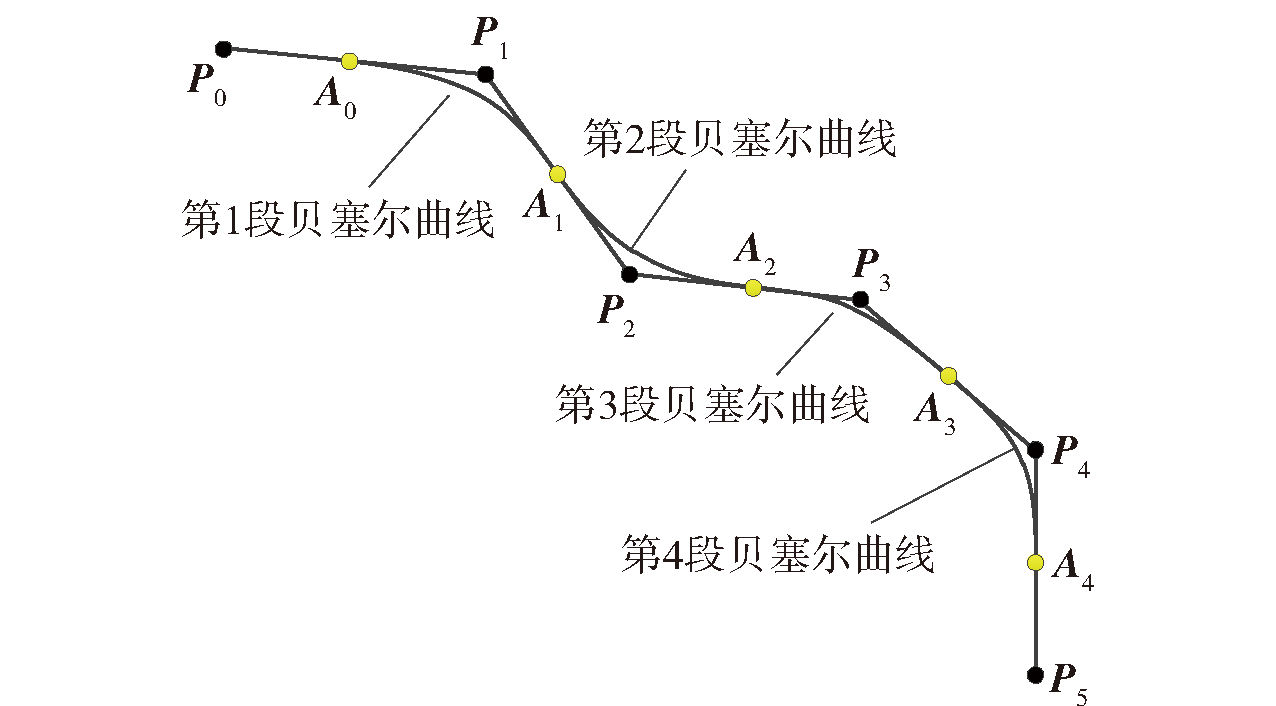
Fig.11 Bezier curve fitting path

Fig.12 Experimental results of maximum rotation angle parameter
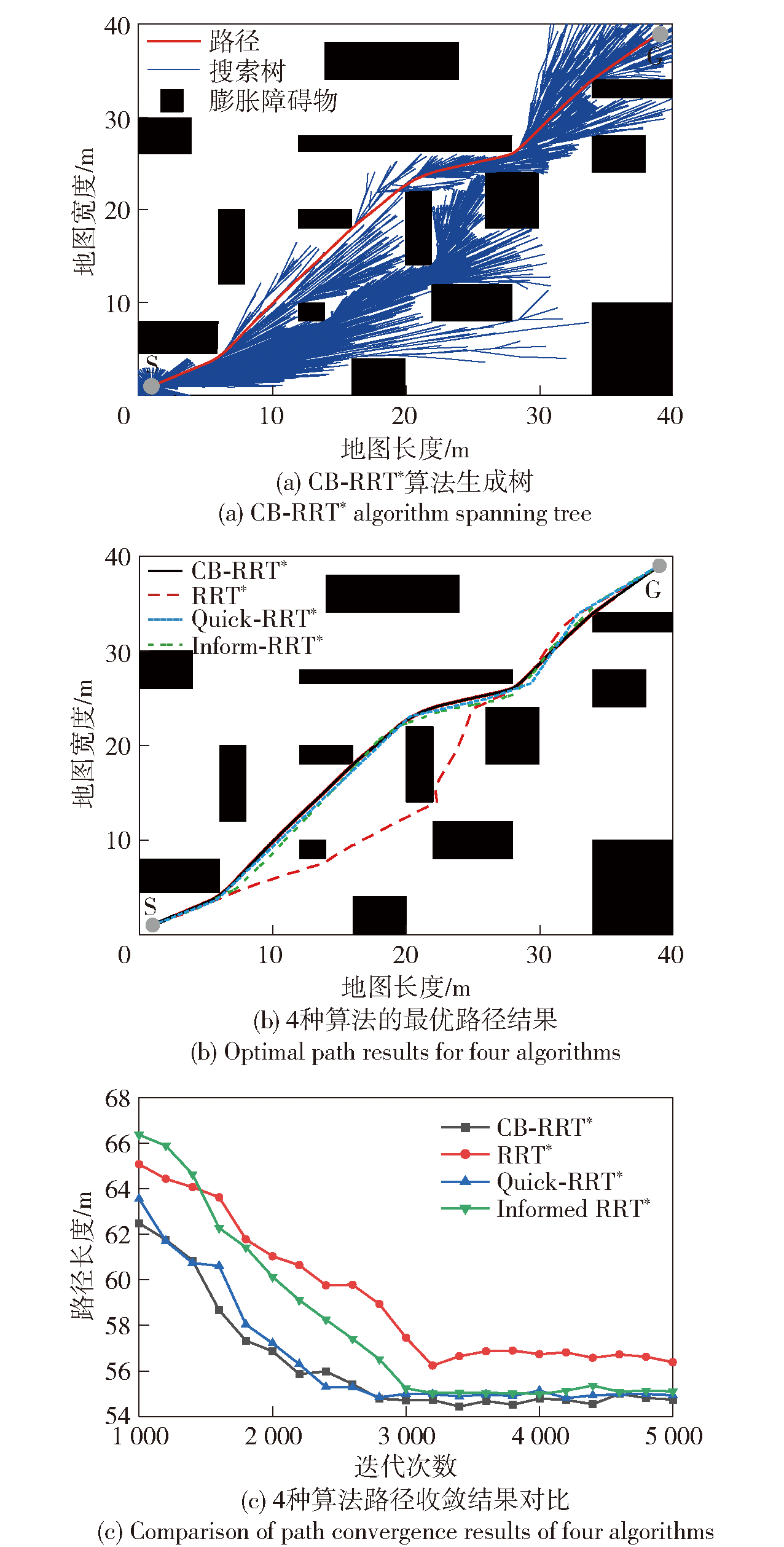
Fig.13 Experimental results of dense obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 56.73 | 58.34 | 0.215 |
| Informed RRT* | 55.23 | 55.02 | 0.127 |
| Quick-RRT* | 55.16 | 59.80 | 0.139 |
| CB-RRT* | 54.80 | 56.51 | 0.024 |
Table 1 Performance comparison of four algorithms in dense obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 56.73 | 58.34 | 0.215 |
| Informed RRT* | 55.23 | 55.02 | 0.127 |
| Quick-RRT* | 55.16 | 59.80 | 0.139 |
| CB-RRT* | 54.80 | 56.51 | 0.024 |
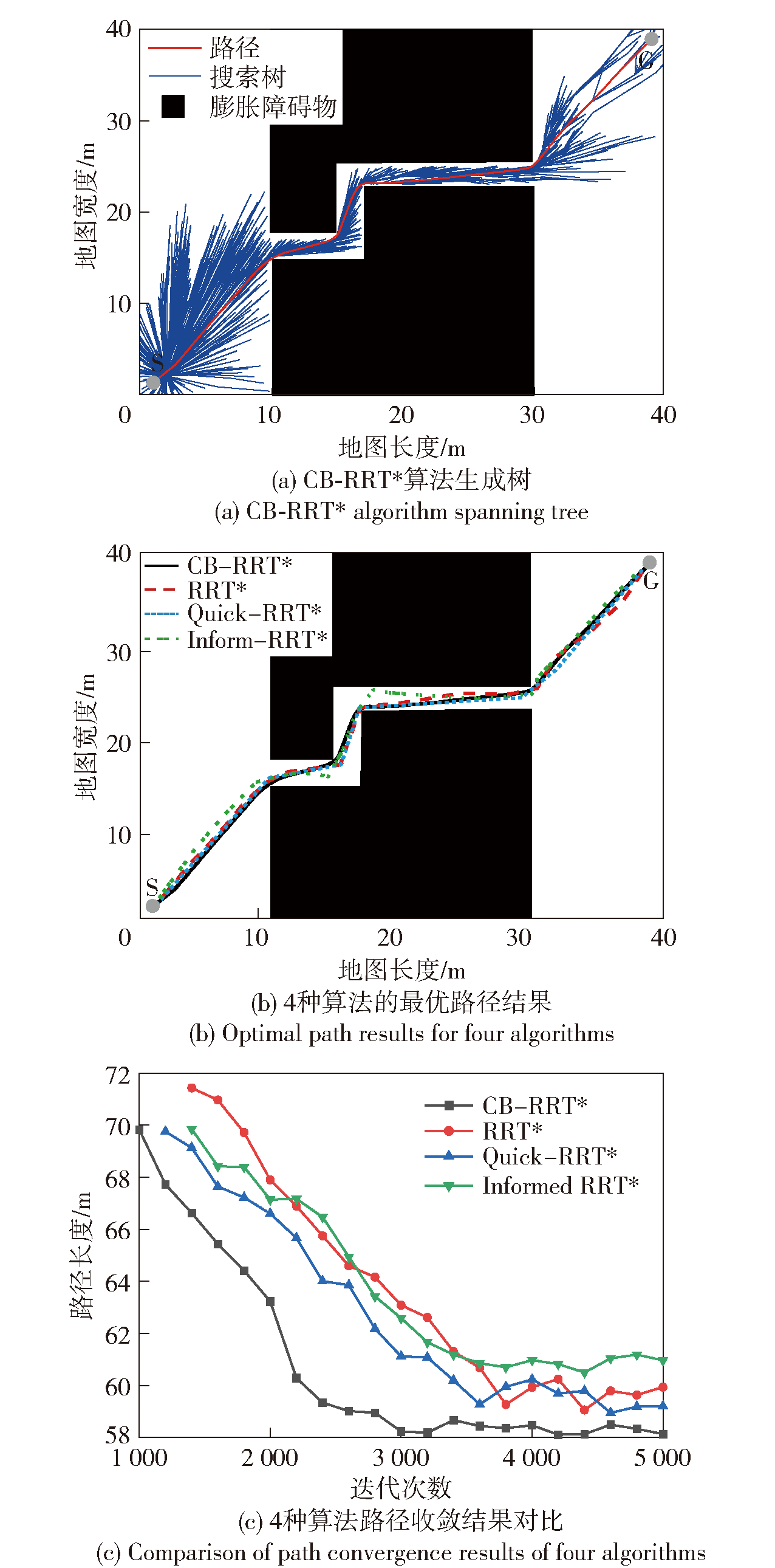
Fig.14 Experimental results in a single-channel environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 59.13 | 39.38 | 0.149 |
| Informed RRT* | 61.27 | 37.89 | 0.274 |
| Quick-RRT* | 59.22 | 38.86 | 0.116 |
| CB-RRT* | 58.23 | 33.76 | 0.037 |
Table 2 Performance comparison of four algorithms in a unique channel environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 59.13 | 39.38 | 0.149 |
| Informed RRT* | 61.27 | 37.89 | 0.274 |
| Quick-RRT* | 59.22 | 38.86 | 0.116 |
| CB-RRT* | 58.23 | 33.76 | 0.037 |
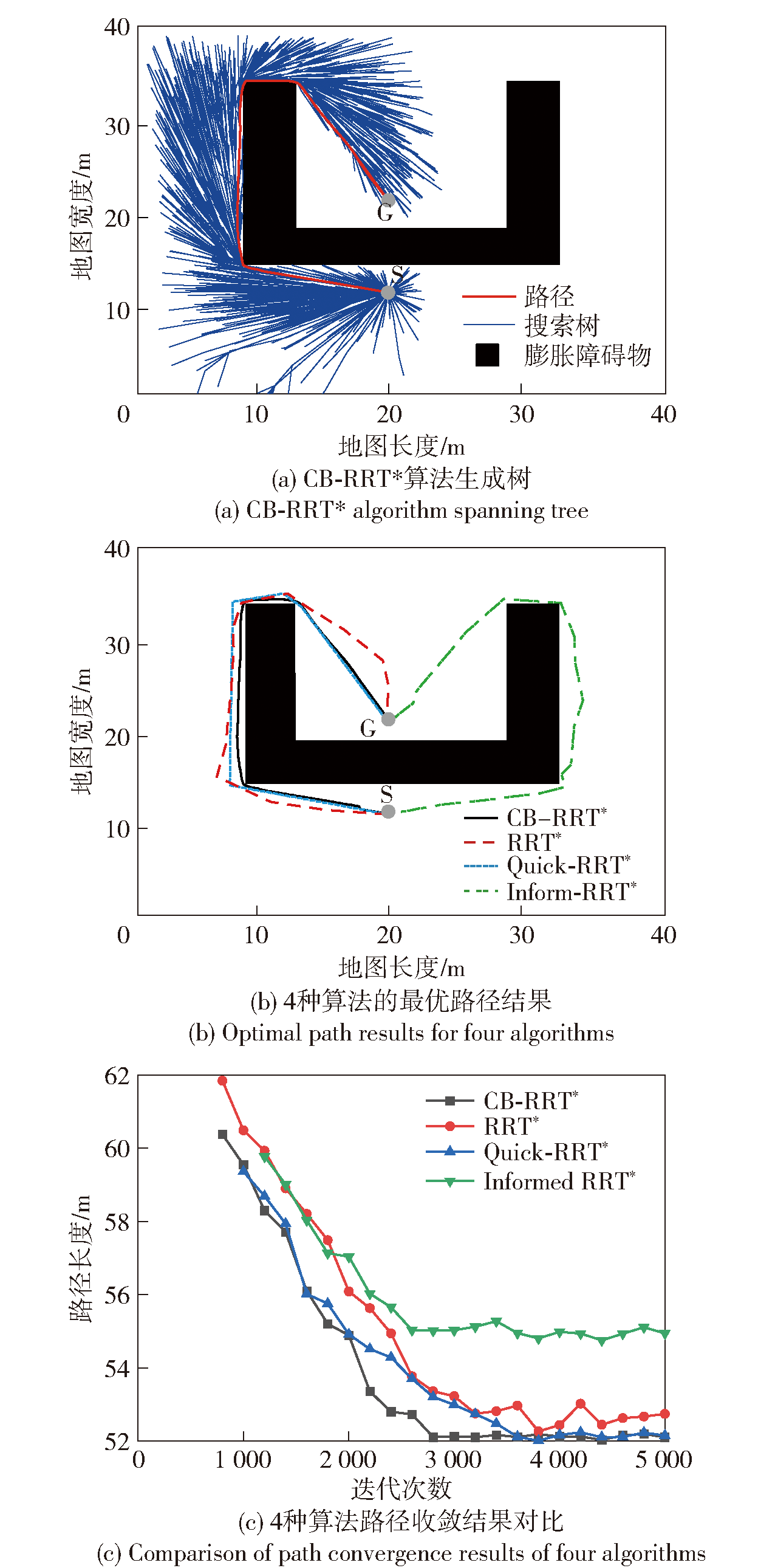
Fig.15 Experimental results in U-shaped obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 53.63 | 76.48 | 0.230 |
| Informed RRT* | 55.06 | 69.67 | 0.272 |
| Quick-RRT* | 52.54 | 72.75 | 0.174 |
| CB-RRT* | 52.10 | 71.32 | 0.057 |
Tab.3 Performance comparison of four algorithms in U-shaped obstacle environment
| 算法 | 路径长度/m | 时间/s | 曲率 |
|---|---|---|---|
| RRT* | 53.63 | 76.48 | 0.230 |
| Informed RRT* | 55.06 | 69.67 | 0.272 |
| Quick-RRT* | 52.54 | 72.75 | 0.174 |
| CB-RRT* | 52.10 | 71.32 | 0.057 |
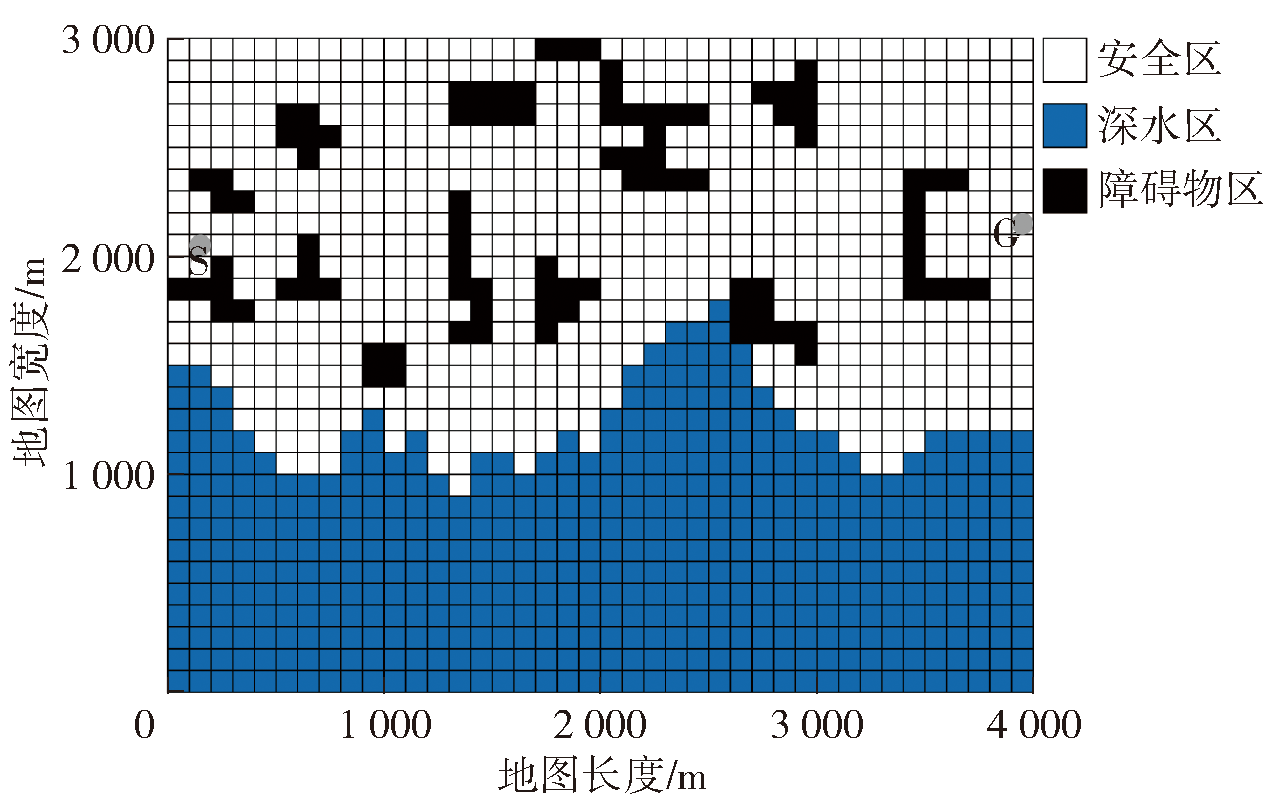
Fig.16 Dynamic tidal flat environment
| 算法 | 路径规划序号 | 长度/m | 时间/s | 曲率 |
|---|---|---|---|---|
| RRT* | 1 | 4229.61 | 96.71 | 0.105 |
| 2 | 1541.34 | 59.60 | 0.114 | |
| Informed RRT* | 1 | 4474.95 | 90.36 | 0.179 |
| 2 | 1736.04 | 64.28 | 0.137 | |
| Quick-RRT* | 1 | 4297.38 | 98.47 | 0.162 |
| 2 | 1640.25 | 63.91 | 0.130 | |
| CB-RRT* | 1 | 4154.26 | 82.04 | 0.047 |
| 2 | 1534.79 | 37.44 | 0.037 |
Table 4 Performance comparison of four algorithms in dynamic tidal flat environment
| 算法 | 路径规划序号 | 长度/m | 时间/s | 曲率 |
|---|---|---|---|---|
| RRT* | 1 | 4229.61 | 96.71 | 0.105 |
| 2 | 1541.34 | 59.60 | 0.114 | |
| Informed RRT* | 1 | 4474.95 | 90.36 | 0.179 |
| 2 | 1736.04 | 64.28 | 0.137 | |
| Quick-RRT* | 1 | 4297.38 | 98.47 | 0.162 |
| 2 | 1640.25 | 63.91 | 0.130 | |
| CB-RRT* | 1 | 4154.26 | 82.04 | 0.047 |
| 2 | 1534.79 | 37.44 | 0.037 |

Fig.17 Path planning results of four algorithms in tidal flat environment
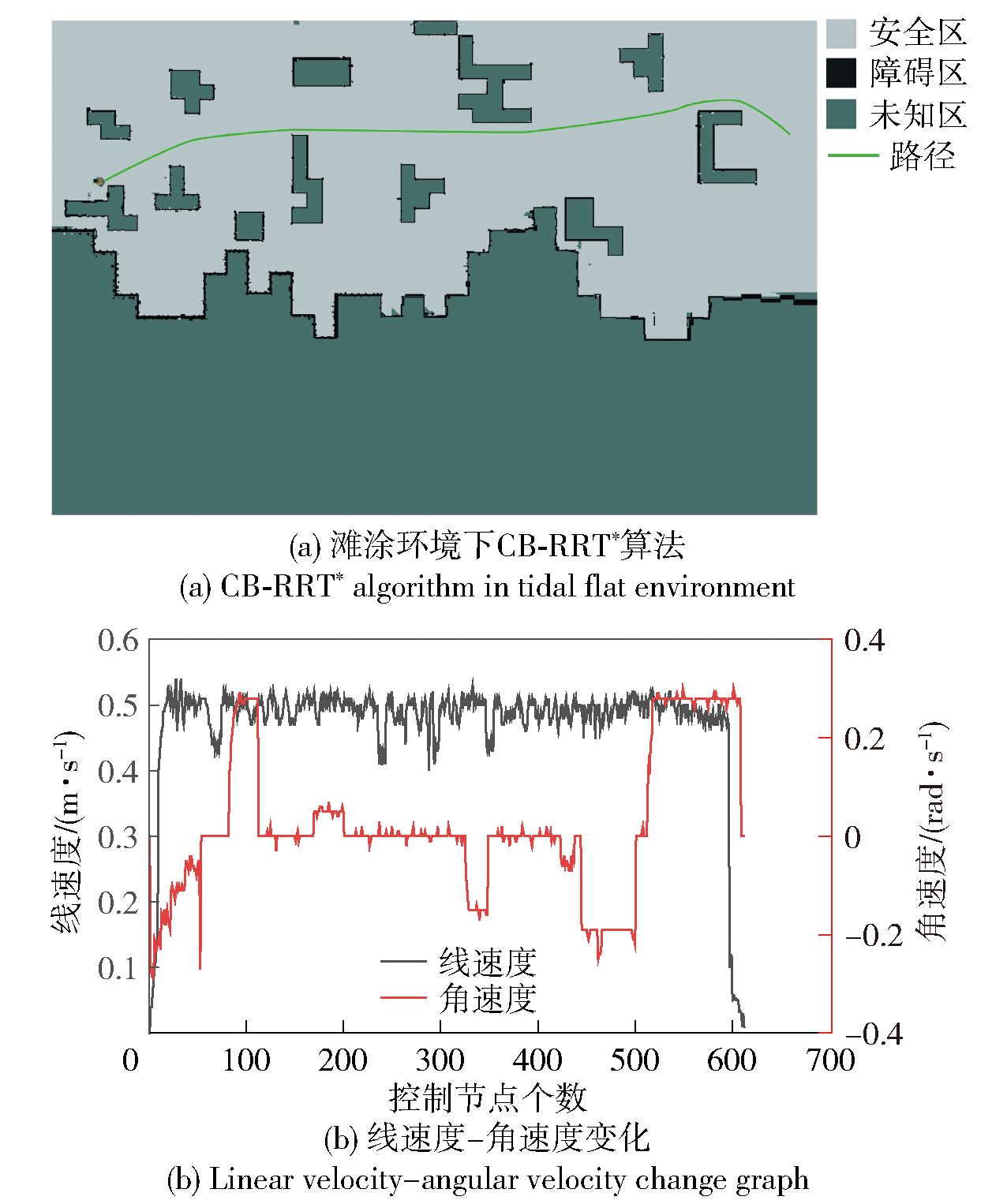
Fig.18 Result of tidal flat environment path planning
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
李东方, 王超, 邓宏彬, 等. 基于人工势场和RRT算法的机器蛇水下三维避障算法[J]. 兵工学报, 2017, 38(增刊1): 205-214.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
徐唐进, 张安民, 高邈, 等. 动态水深环境下的无人艇路径规划[J]. 测绘科学, 2021, 46(6): 180-189.
|
|
|
|
| [9] |
|
| [10] |
|
| [11] |
陈秋莲, 蒋环宇, 郑以君. 机器人路径规划的快速扩展随机树算法综述[J]. 计算机工程与应用, 2019, 55(16): 10-17.
doi: 10.3778/j.issn.1002-8331.1905-0061 |
|
|
|
| [12] |
|
| [13] |
|
| [14] |
张卫波, 肖继亮. 改进RRT算法在复杂环境下智能车路径规划中的应用[J]. 中国公路学报, 2021, 34(3): 225-234.
doi: 10.19721/j.cnki.1001-7372.2021.03.017 |
|
|
|
| [15] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
|
|
| [16] |
|
| [17] |
徐岩, 崔媛媛. 基于Q-IGA动态拟合贝塞尔曲线的路径规划[J]. 湖南大学学报(自然科学版), 2020, 47(10): 68-75.
|
|
|
|
| [18] |
谭建豪, 潘豹, 王耀南, 等. 基于改进RRT*FN算法的机器人路径规划[J]. 控制与决策, 2021, 36(8): 1834-1840.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [1] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [2] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [3] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| [4] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [5] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [6] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [7] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [8] | ZHANG Lei, FANG Yang-wang, CHAI Dong, YONG Xiao-ju. Cruise Missile Path Planning Based on Improved Quantum Evolutionary Algorithm [J]. Acta Armamentarii, 2014, 35(11): 1820-1827. |
| [9] | FU Yang-guang, ZHOU Cheng-ping2, HU Han-ping2. Research on Differential Evolution Algorithm for Path Planning for Unmanned Aerial Vehicle inOcean Environment [J]. Acta Armamentarii, 2012, 33(3): 295-300. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||