
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (8): 2245-2262.doi: 10.12382/bgxb.2022.0282
Previous Articles Next Articles
DU Wanshan1, ZHOU Zhou1,*( ), BAI Yu1, ZHANG Zhilin2, WANG Keilei1
), BAI Yu1, ZHANG Zhilin2, WANG Keilei1
Received:2022-04-20
Online:2023-08-30
Contact:
ZHOU Zhou
CLC Number:
DU Wanshan, ZHOU Zhou, BAI Yu, ZHANG Zhilin, WANG Keilei. Study on Multibody Dynamics Modeling and Flight Dynamic Characteristics of Combined Aircraft[J]. Acta Armamentarii, 2023, 44(8): 2245-2262.
Add to citation manager EndNote|Ris|BibTeX
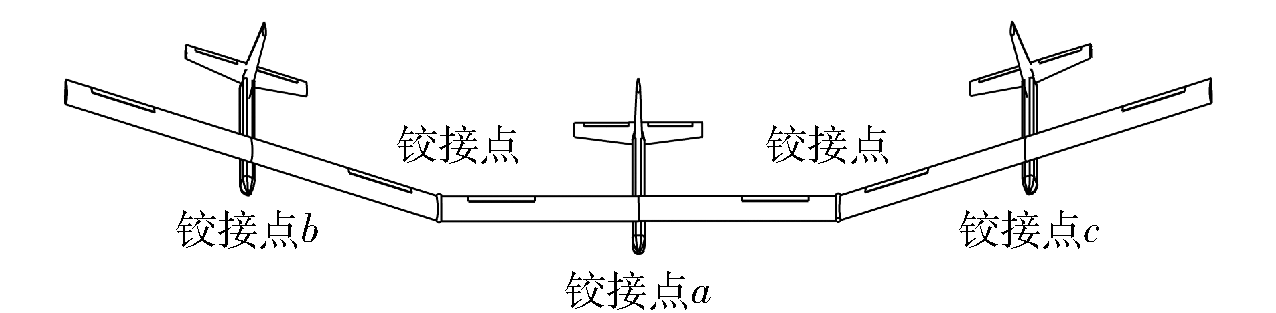
Fig.1 Diagram of combined three-body aircraft
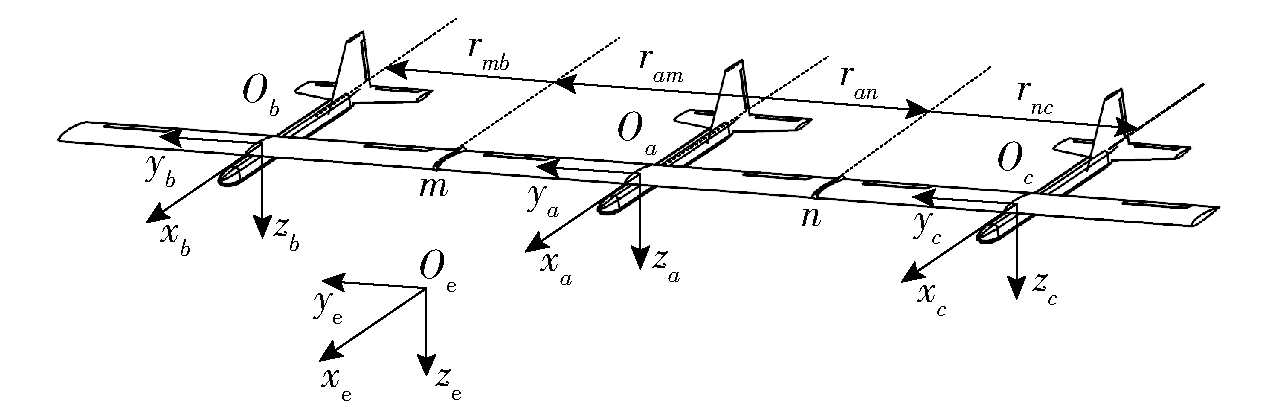
Fig.2 Diagram of coordinate system of combined three-body aircraft
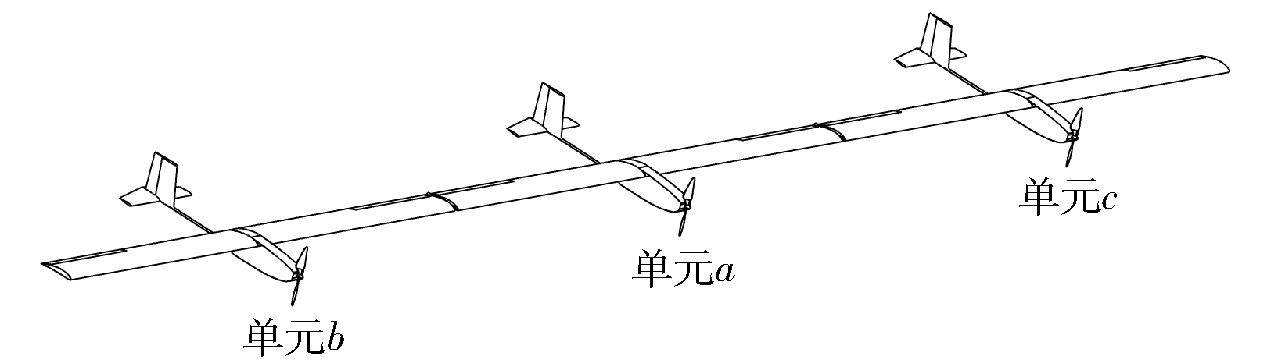
Fig.3 Example model of combined three-body aircraft
| 参数 | 数值 |
|---|---|
| 质量/kg | 3.75 |
| 参考展长/m | 3.2 |
| 平均气动弦长/m | 0.3 |
| 展弦比 | 10.6 |
| 参考面积/m2 | 0.87 |
| 对轴Ox的惯量Ixx/(kg·m2) | 0.734 |
| 对轴Oy的惯量Iyy/(kg·m2) | 0.41 |
| 对轴Oz的惯量Izz/(kg·m2) | 1.1 |
| 对轴Oz和Ox的惯性积Izx/(kg·m2) | -0.01 |
Table 1 Basic parameters of single aircraft
| 参数 | 数值 |
|---|---|
| 质量/kg | 3.75 |
| 参考展长/m | 3.2 |
| 平均气动弦长/m | 0.3 |
| 展弦比 | 10.6 |
| 参考面积/m2 | 0.87 |
| 对轴Ox的惯量Ixx/(kg·m2) | 0.734 |
| 对轴Oy的惯量Iyy/(kg·m2) | 0.41 |
| 对轴Oz的惯量Izz/(kg·m2) | 1.1 |
| 对轴Oz和Ox的惯性积Izx/(kg·m2) | -0.01 |
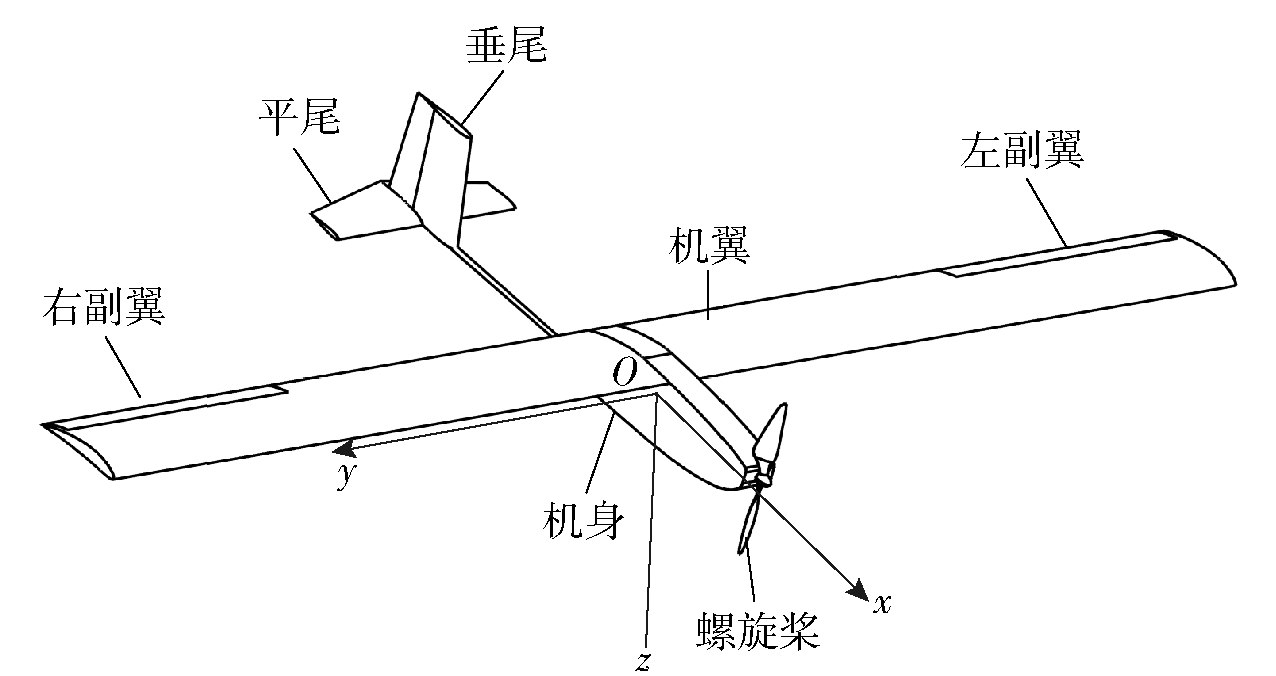
Fig.4 Model of single aircraft
| CFD仿真内容 | 气动参数 | 计算方法 |
|---|---|---|
| 基本气动参数项 | CD0、CL0等 | 雷诺平均Navier-Stokes (RANS)方法 |
| 气动耦合项 | C 、C 等 | |
| 静导数项 | CDα、CLα等 | |
| 操纵导数项 | C 、C 等 | |
| 动导数项 | CLq、CYp等 | 涡格法 |
Table 2 Method of establishing aerodynamic database
| CFD仿真内容 | 气动参数 | 计算方法 |
|---|---|---|
| 基本气动参数项 | CD0、CL0等 | 雷诺平均Navier-Stokes (RANS)方法 |
| 气动耦合项 | C 、C 等 | |
| 静导数项 | CDα、CLα等 | |
| 操纵导数项 | C 、C 等 | |
| 动导数项 | CLq、CYp等 | 涡格法 |
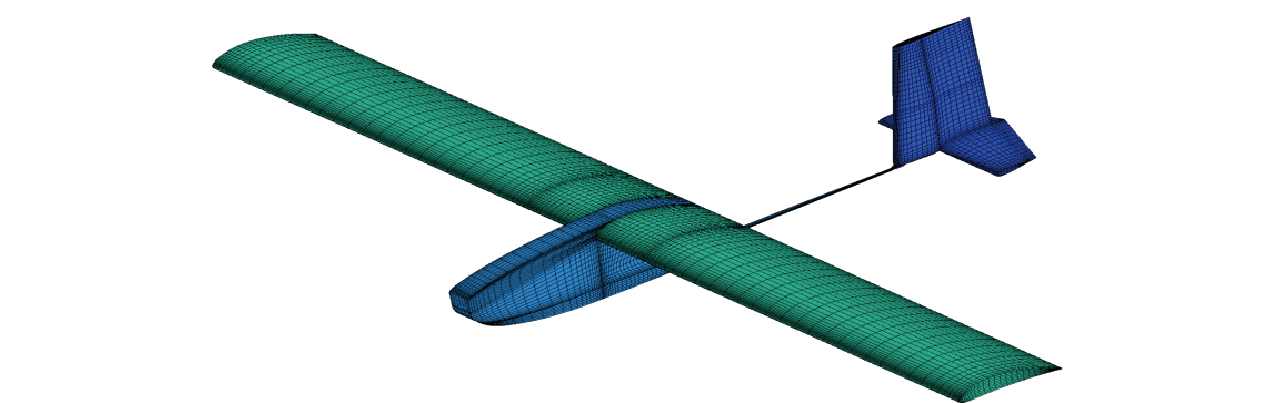
Fig.5 Diagram of grid distribution of single aircraft

Fig.6 Diagram of grid distribution of combined three-body aircraft
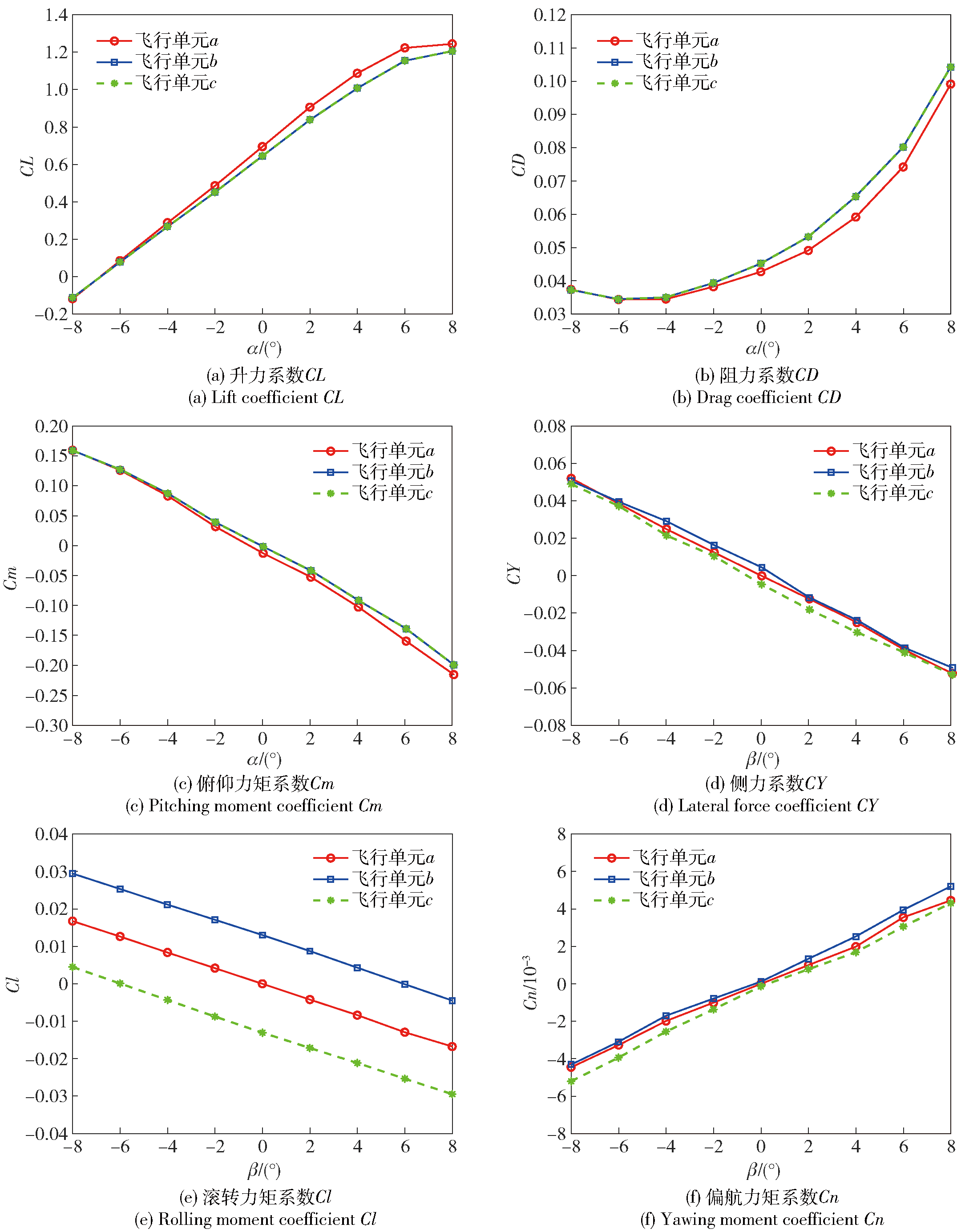
Fig.7 Curve of aerodynamic parameters of single aircraft varying with attack angle α and sideslip angle β
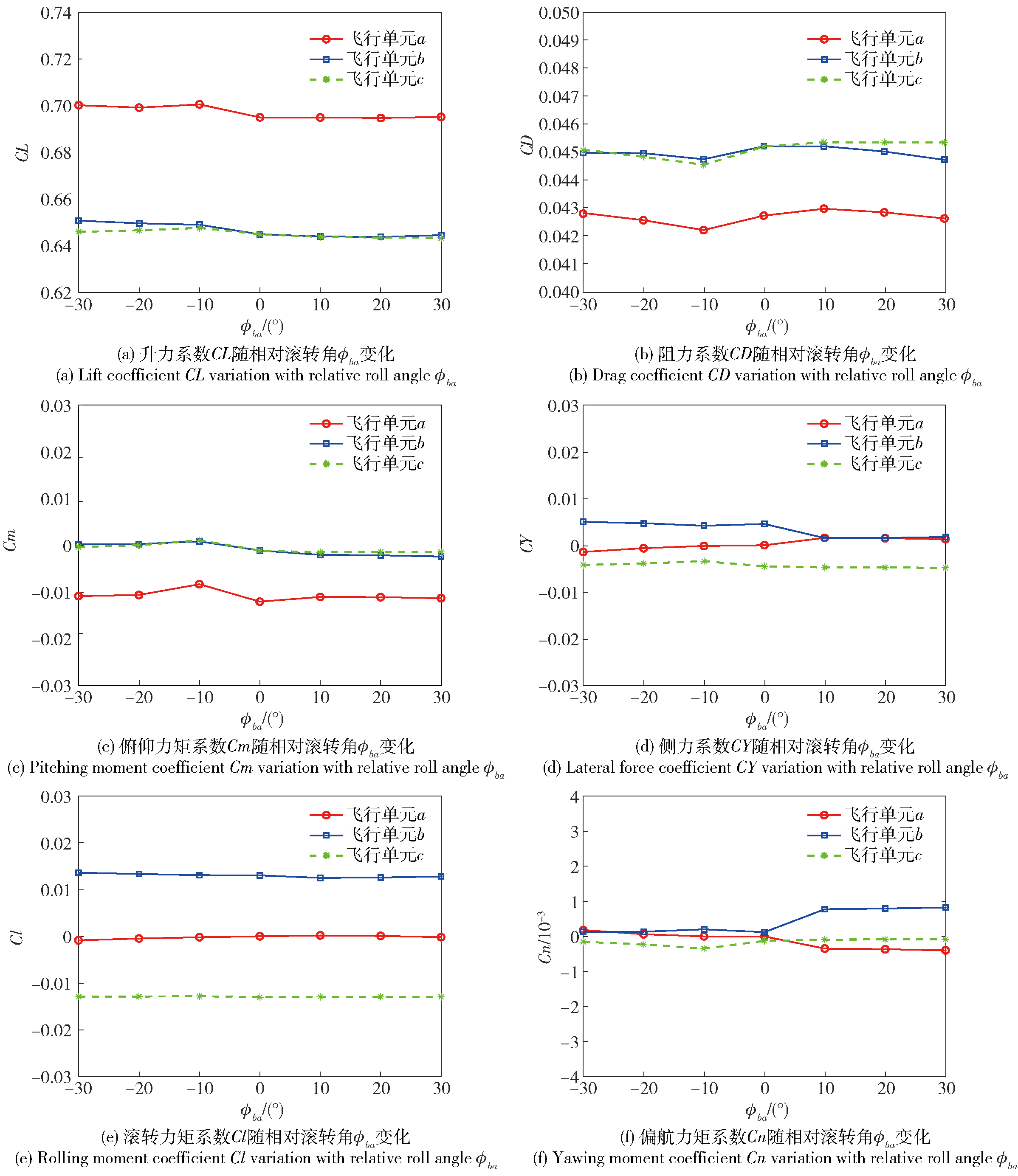
Fig.8 Curve of aerodynamic parameters of single aircraft varying with relative roll angle ϕba
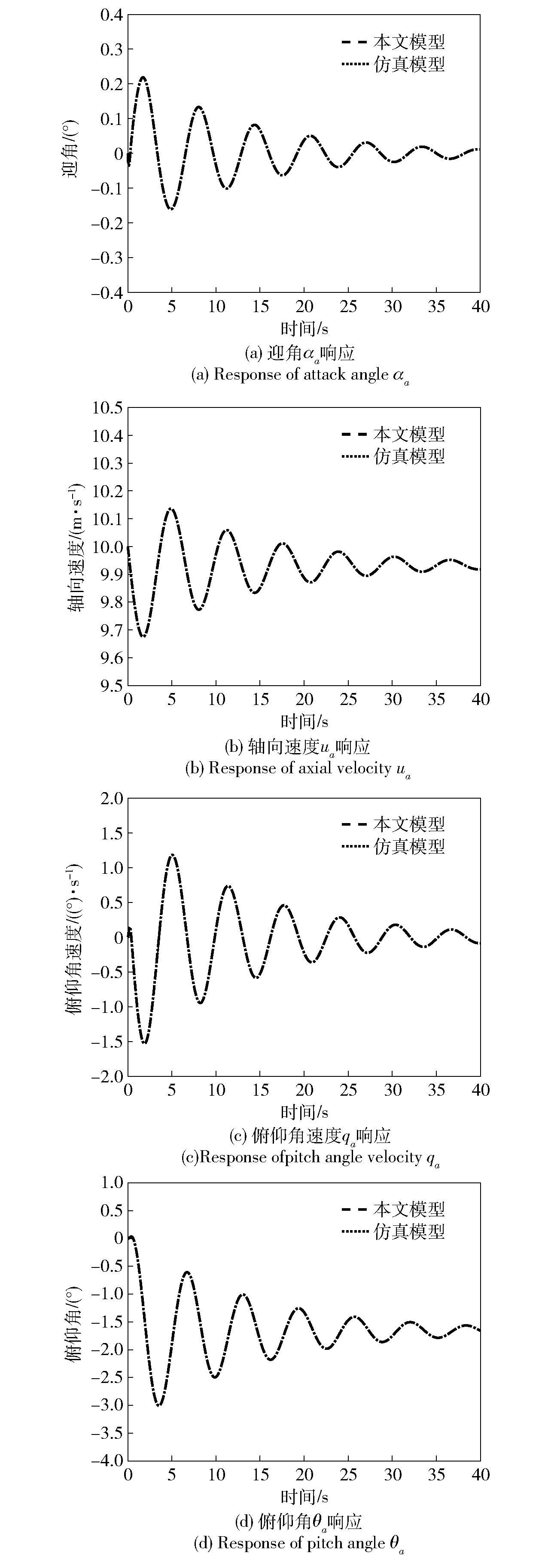
Fig.9 Diagram of state response of single aircraft a
| 初始状态 | ϕba/(°) | ϕca/(°) |
|---|---|---|
| 1 | 10 | -10 |
| 2 | -10 | 10 |
Table 3 Relative roll angles at different initial states
| 初始状态 | ϕba/(°) | ϕca/(°) |
|---|---|---|
| 1 | 10 | -10 |
| 2 | -10 | 10 |
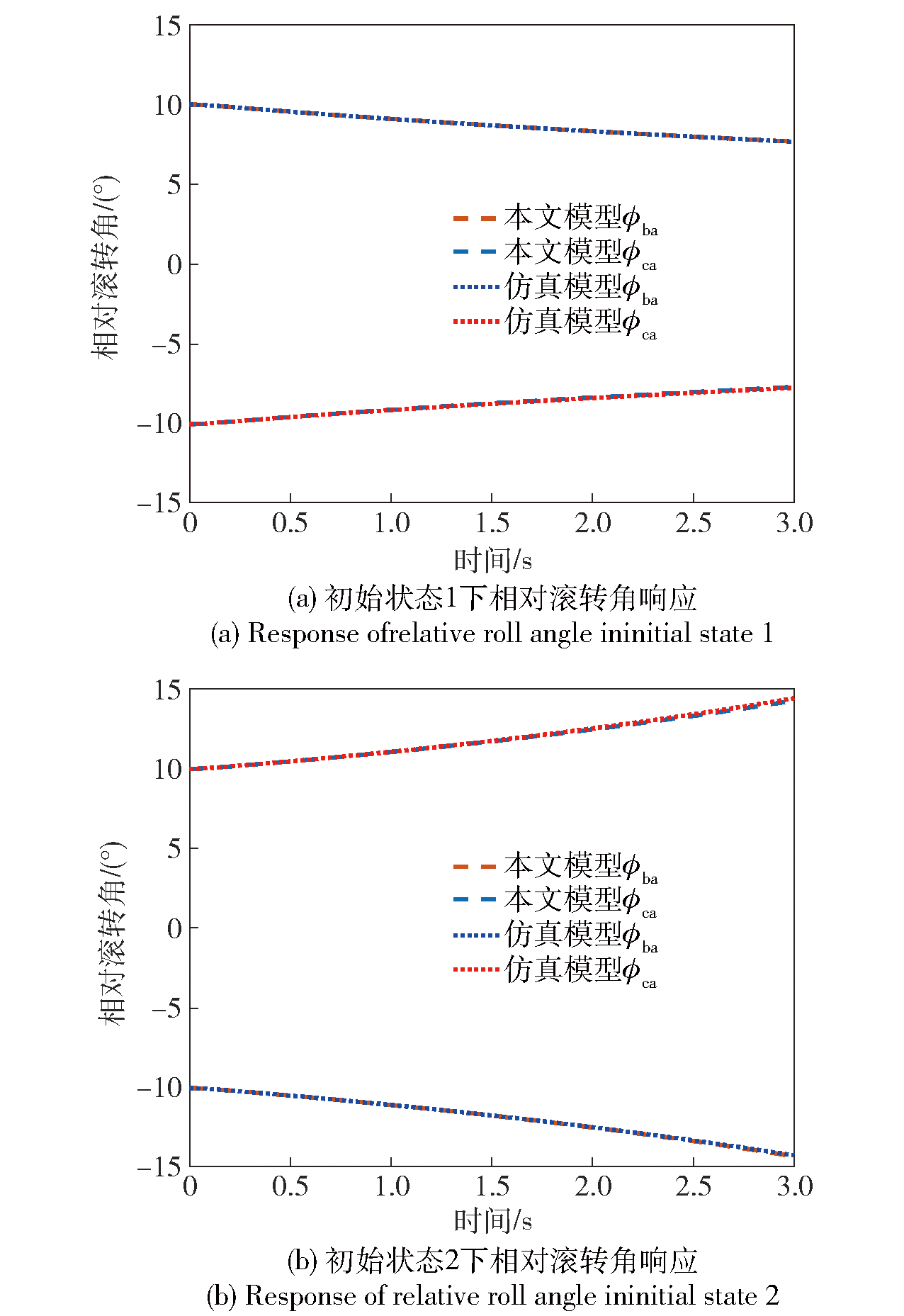
Fig.10 Diagram of relative roll angle response in different initial states
| 未知配平量 | 配平状态1 | 配平状态2 |
|---|---|---|
| 升降舵偏角/(°) | -0.2622 | -0.1347 |
| 油门杆操纵量/% | 35.5 | 35.5 |
| 方向舵偏角/(°) | 0 | 0 |
| 飞行单元a副翼偏角/(°) | 0 | 0 |
| 飞行单元b副翼偏角/(°) | 1.6809 | 2.0557 |
| 飞行单元c副翼偏角/(°) | -1.6809 | 2.0557 |
| 相对滚转角ϕba/(°) | 6.4393 | -6.6386 |
| 相对滚转角ϕca/(°) | -6.4393 | 6.6386 |
Table 4 Result of trim analysis
| 未知配平量 | 配平状态1 | 配平状态2 |
|---|---|---|
| 升降舵偏角/(°) | -0.2622 | -0.1347 |
| 油门杆操纵量/% | 35.5 | 35.5 |
| 方向舵偏角/(°) | 0 | 0 |
| 飞行单元a副翼偏角/(°) | 0 | 0 |
| 飞行单元b副翼偏角/(°) | 1.6809 | 2.0557 |
| 飞行单元c副翼偏角/(°) | -1.6809 | 2.0557 |
| 相对滚转角ϕba/(°) | 6.4393 | -6.6386 |
| 相对滚转角ϕca/(°) | -6.4393 | 6.6386 |
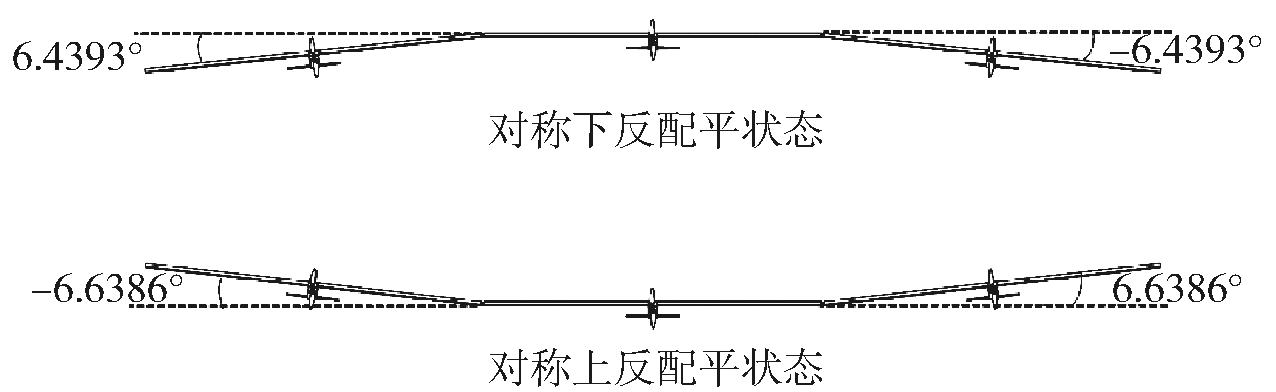
Fig.11 Diagram of two trim states
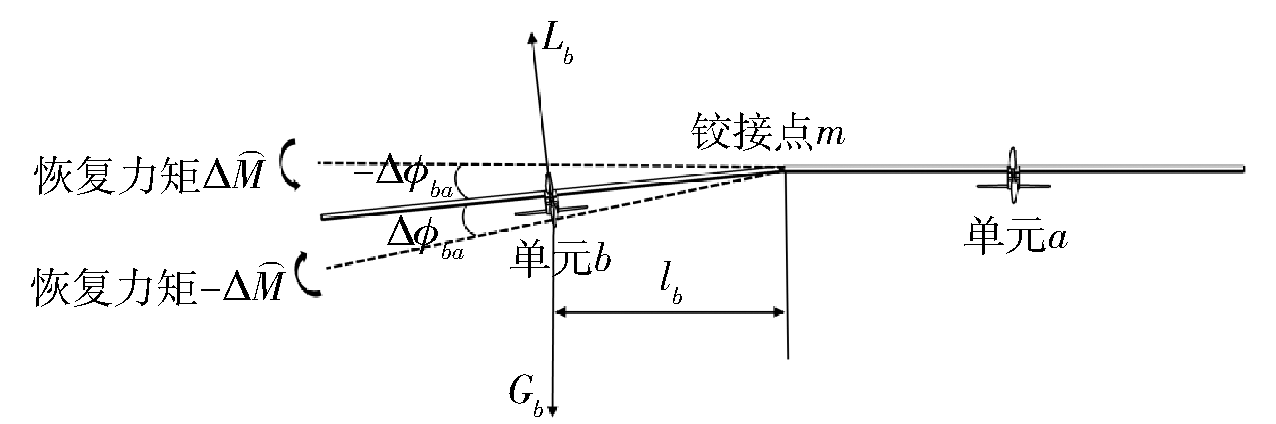
Fig.12 Static stability analysis of relative rolling motion of “symmetrical lower inverse”
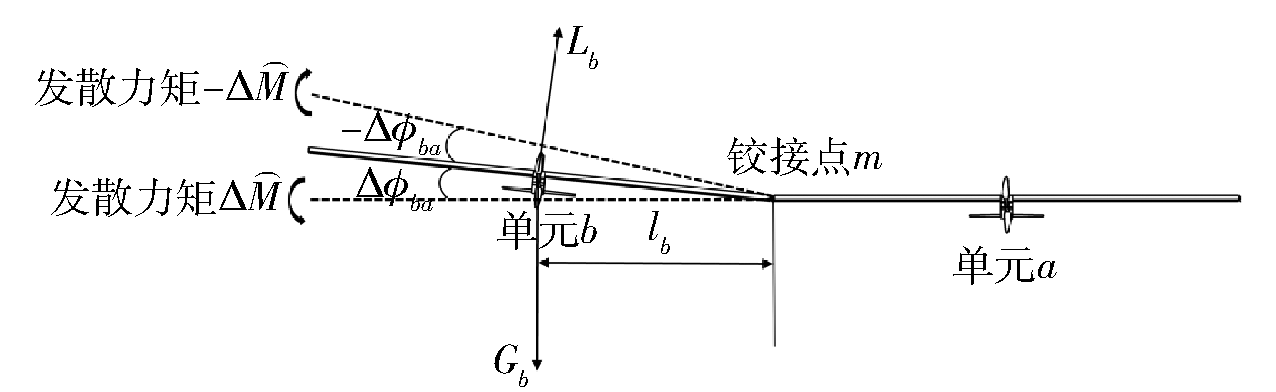
Fig.13 Static stability analysis of relative rolling motion of “symmetrical upper inverse”
| 运动模态 | “对称下反”配平点1 | “对称上反”配平点2 | ||||||
|---|---|---|---|---|---|---|---|---|
| 特征根 | 模态特征 | 阻尼比 | 时间常数/s | 特征根 | 模态特征 | 阻尼比 | 时间常数/s | |
| 短周期模态 | -7.1334±5.9653j | 收敛 | 0.7671 | 1.0533 | -7.1254±5.8959j | 收敛 | 0.7704 | 1.0657 |
| 长周期模态 | -0.0363±0.9628j | 收敛 | 0.0377 | 6.5260 | -0.0372±0.9639j | 收敛 | 0.0386 | 6.5185 |
| 滚转模态 | -56.2923 | 收敛 | 1 | 0.0123 | -57.9442 | 收敛 | 1 | 0.0120 |
| 螺旋模态 | 0.1874 | 发散 | 1 | 3.6988 | -0.1297 | 收敛 | 1 | 5.3442 |
| 荷兰滚模态 | -0.6013±0.5190j | 收敛 | 0.7570 | 12.1063 | -0.3580±0.7475j | 收敛 | 0.4319 | 8.4056 |
| 复合对称运动模态1 | -17.288 | 收敛 | 1 | 0.0401 | -17.8852 | 收敛 | 1 | 0.0388 |
| 复合对称运动模态2 | -0.1579 | 收敛 | 1 | 4.3898 | 0.1200 | 发散 | 1 | 5.7762 |
| 复合反对称运动模态1 | -9.4704 | 收敛 | 1 | 0.0732 | -9.6093 | 收敛 | 1 | 0.0721 |
| 复合反对称运动模态2 | -0.3058 | 收敛 | 1 | 2.2667 | 0.2888 | 发散 | 1 | 2.4001 |
Table 5 Motion mode analysis of trim states
| 运动模态 | “对称下反”配平点1 | “对称上反”配平点2 | ||||||
|---|---|---|---|---|---|---|---|---|
| 特征根 | 模态特征 | 阻尼比 | 时间常数/s | 特征根 | 模态特征 | 阻尼比 | 时间常数/s | |
| 短周期模态 | -7.1334±5.9653j | 收敛 | 0.7671 | 1.0533 | -7.1254±5.8959j | 收敛 | 0.7704 | 1.0657 |
| 长周期模态 | -0.0363±0.9628j | 收敛 | 0.0377 | 6.5260 | -0.0372±0.9639j | 收敛 | 0.0386 | 6.5185 |
| 滚转模态 | -56.2923 | 收敛 | 1 | 0.0123 | -57.9442 | 收敛 | 1 | 0.0120 |
| 螺旋模态 | 0.1874 | 发散 | 1 | 3.6988 | -0.1297 | 收敛 | 1 | 5.3442 |
| 荷兰滚模态 | -0.6013±0.5190j | 收敛 | 0.7570 | 12.1063 | -0.3580±0.7475j | 收敛 | 0.4319 | 8.4056 |
| 复合对称运动模态1 | -17.288 | 收敛 | 1 | 0.0401 | -17.8852 | 收敛 | 1 | 0.0388 |
| 复合对称运动模态2 | -0.1579 | 收敛 | 1 | 4.3898 | 0.1200 | 发散 | 1 | 5.7762 |
| 复合反对称运动模态1 | -9.4704 | 收敛 | 1 | 0.0732 | -9.6093 | 收敛 | 1 | 0.0721 |
| 复合反对称运动模态2 | -0.3058 | 收敛 | 1 | 2.2667 | 0.2888 | 发散 | 1 | 2.4001 |
| 配平状态 | 运动模态 | Δpa | Δϕa | Δqa | Δθa | Δra | Δψa | Δωba | Δϕba | Δωca | Δϕca |
|---|---|---|---|---|---|---|---|---|---|---|---|
| “对称下反” 配平点1 | 复合对称运动 模态1 | -1.90× 10-15 | 1.10× 10-16 | -0.0244 | 0.0014 | 2.37× 10-18 | -1.37× 10-19 | 0.5766 | -0.0334 | -0.5766 | 0.0334 |
| 复合对称运动 模态2 | 1.01× 10-15 | -1.07× 10-14 | -0.0007 | 0.0043 | -3.79× 10-15 | 2.39× 10-14 | 0.0942 | -0.5962 | -0.0942 | 0.5962 | |
| 复合反对称 运动模态1 | -0.7885 | 0.0833 | -1.21× 10-15 | 9.12× 10-17 | -0.0488 | 0.0052 | 0.4221 | -0.0446 | 0.4221 | -0.0446 | |
| 复合反对称 运动模态2 | -0.1118 | 0.3658 | -8.87× 10-16 | 1.32× 10-15 | -0.0208 | 0.0681 | 0.1840 | -0.6018 | 0.1840 | -0.6018 | |
| “对称上反” 配平点2 | 复合对称 运动模态1 | -1.89× 10-16 | 1.39× 10-18 | -0.0261 | 0.0015 | 1.10× 10-16 | -6.16× 10-18 | -0.5566 | 0.0311 | 0.5566 | -0.0311 |
| 复合对称 运动模态2 | -5.98× 10-14 | -5.05× 10-13 | -0.0026 | -0.0216 | -1.27× 10-14 | -1.06× 10-13 | 0.0755 | 0.6291 | -0.0755 | -0.6291 | |
| 复合反对称 运动模态1 | -0.7924 | 0.0825 | 1.07× 10-14 | -1.07× 10-15 | -0.0486 | 0.0051 | 0.3863 | -0.0402 | 0.3863 | -0.0402 | |
| 复合反对称 运动模态2 | 0.1039 | 0.3596 | -5.83× 10-14 | -2.06× 10-13 | -0.0345 | -0.1195 | -0.1795 | -0.6214 | -0.1795 | -0.6214 |
Table 6 Feature vector analysis of new motion modes
| 配平状态 | 运动模态 | Δpa | Δϕa | Δqa | Δθa | Δra | Δψa | Δωba | Δϕba | Δωca | Δϕca |
|---|---|---|---|---|---|---|---|---|---|---|---|
| “对称下反” 配平点1 | 复合对称运动 模态1 | -1.90× 10-15 | 1.10× 10-16 | -0.0244 | 0.0014 | 2.37× 10-18 | -1.37× 10-19 | 0.5766 | -0.0334 | -0.5766 | 0.0334 |
| 复合对称运动 模态2 | 1.01× 10-15 | -1.07× 10-14 | -0.0007 | 0.0043 | -3.79× 10-15 | 2.39× 10-14 | 0.0942 | -0.5962 | -0.0942 | 0.5962 | |
| 复合反对称 运动模态1 | -0.7885 | 0.0833 | -1.21× 10-15 | 9.12× 10-17 | -0.0488 | 0.0052 | 0.4221 | -0.0446 | 0.4221 | -0.0446 | |
| 复合反对称 运动模态2 | -0.1118 | 0.3658 | -8.87× 10-16 | 1.32× 10-15 | -0.0208 | 0.0681 | 0.1840 | -0.6018 | 0.1840 | -0.6018 | |
| “对称上反” 配平点2 | 复合对称 运动模态1 | -1.89× 10-16 | 1.39× 10-18 | -0.0261 | 0.0015 | 1.10× 10-16 | -6.16× 10-18 | -0.5566 | 0.0311 | 0.5566 | -0.0311 |
| 复合对称 运动模态2 | -5.98× 10-14 | -5.05× 10-13 | -0.0026 | -0.0216 | -1.27× 10-14 | -1.06× 10-13 | 0.0755 | 0.6291 | -0.0755 | -0.6291 | |
| 复合反对称 运动模态1 | -0.7924 | 0.0825 | 1.07× 10-14 | -1.07× 10-15 | -0.0486 | 0.0051 | 0.3863 | -0.0402 | 0.3863 | -0.0402 | |
| 复合反对称 运动模态2 | 0.1039 | 0.3596 | -5.83× 10-14 | -2.06× 10-13 | -0.0345 | -0.1195 | -0.1795 | -0.6214 | -0.1795 | -0.6214 |
| 运动模态 | 特征根 | 模态特征 |
|---|---|---|
| 短周期模态 | -1.0419±2.1693j | 收敛 |
| 长周期模态 | 0.0643±0.0489j | 发散 |
| 滚转模态 | -4.4588 | 收敛 |
| 荷兰滚模态 | -0.2048±0.8746j | 收敛 |
| 复合运动模态1 | -0.9696 | 收敛 |
| 复合运动模态2 | 0.9625 | 发散 |
Table 7 Motion modes of combined two-body aircraft
| 运动模态 | 特征根 | 模态特征 |
|---|---|---|
| 短周期模态 | -1.0419±2.1693j | 收敛 |
| 长周期模态 | 0.0643±0.0489j | 发散 |
| 滚转模态 | -4.4588 | 收敛 |
| 荷兰滚模态 | -0.2048±0.8746j | 收敛 |
| 复合运动模态1 | -0.9696 | 收敛 |
| 复合运动模态2 | 0.9625 | 发散 |
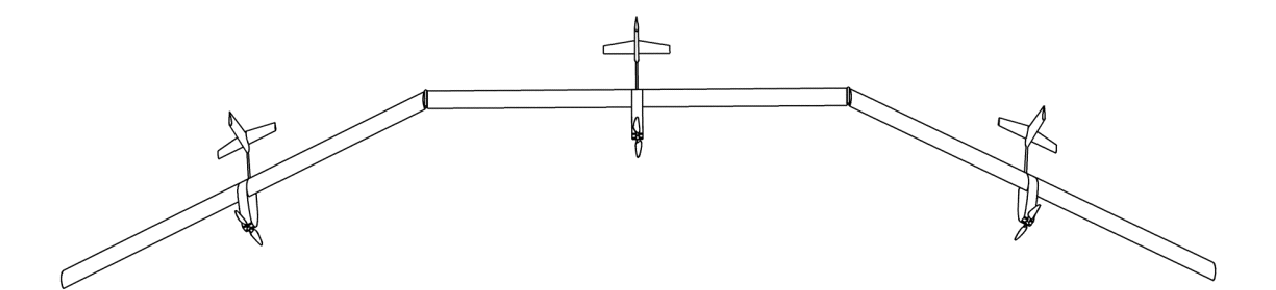
Fig.14 Composite symmetric motion

Fig.15 Composite antisymmetric motion
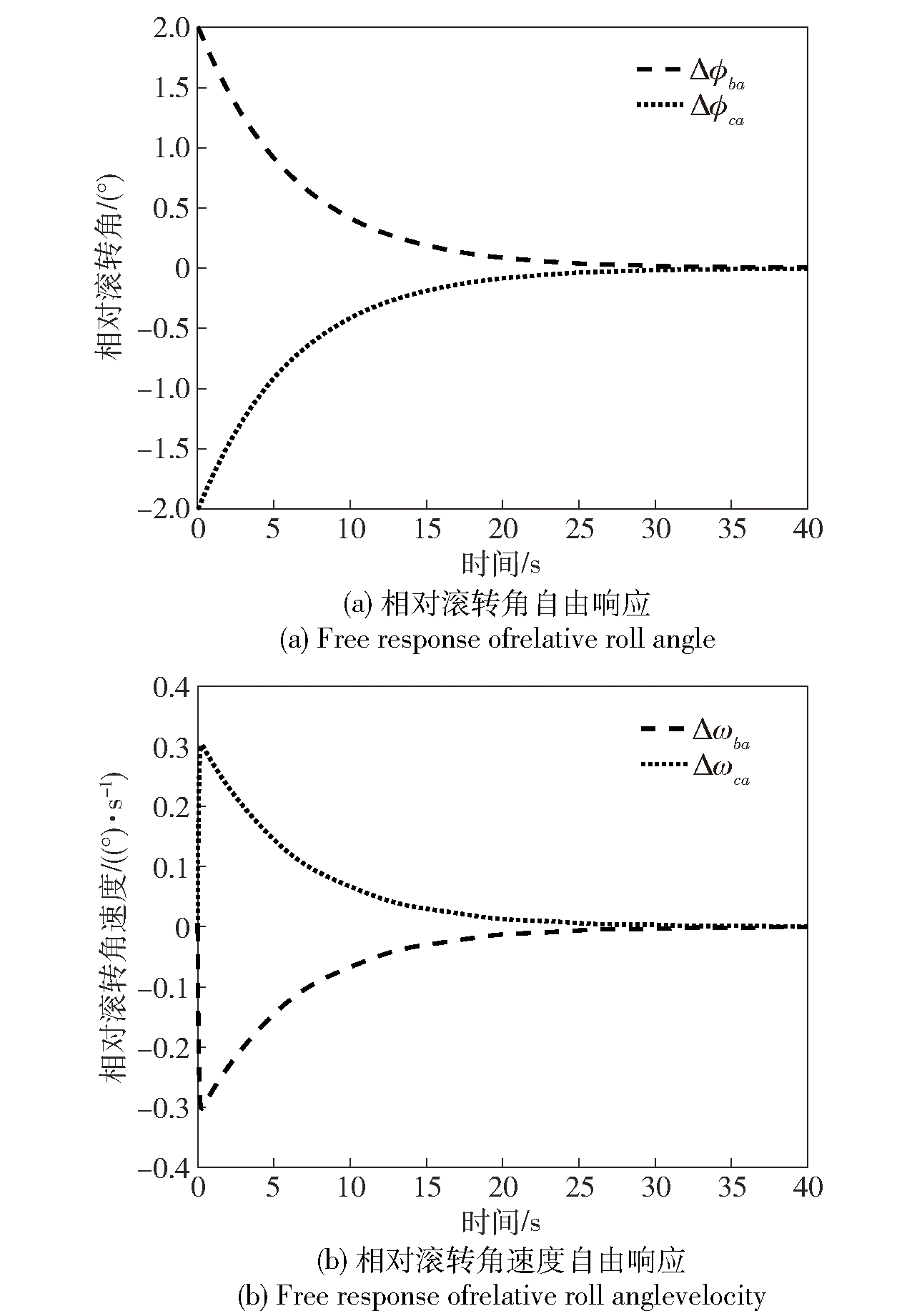
Fig.16 System free response of “symmetrical lower inverse”
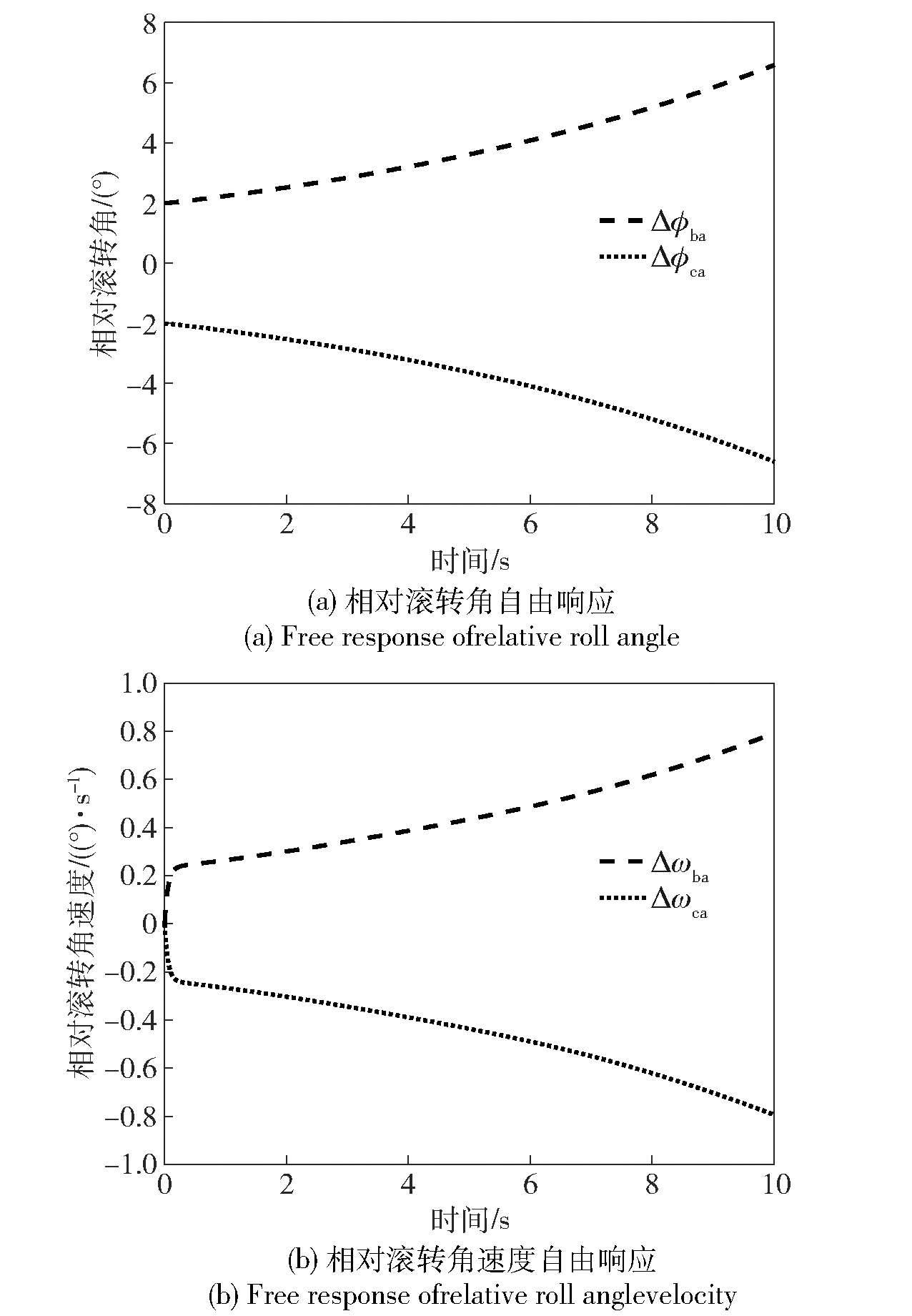
Fig.17 System free response of “symmetrical upper inverse” at trim point 2
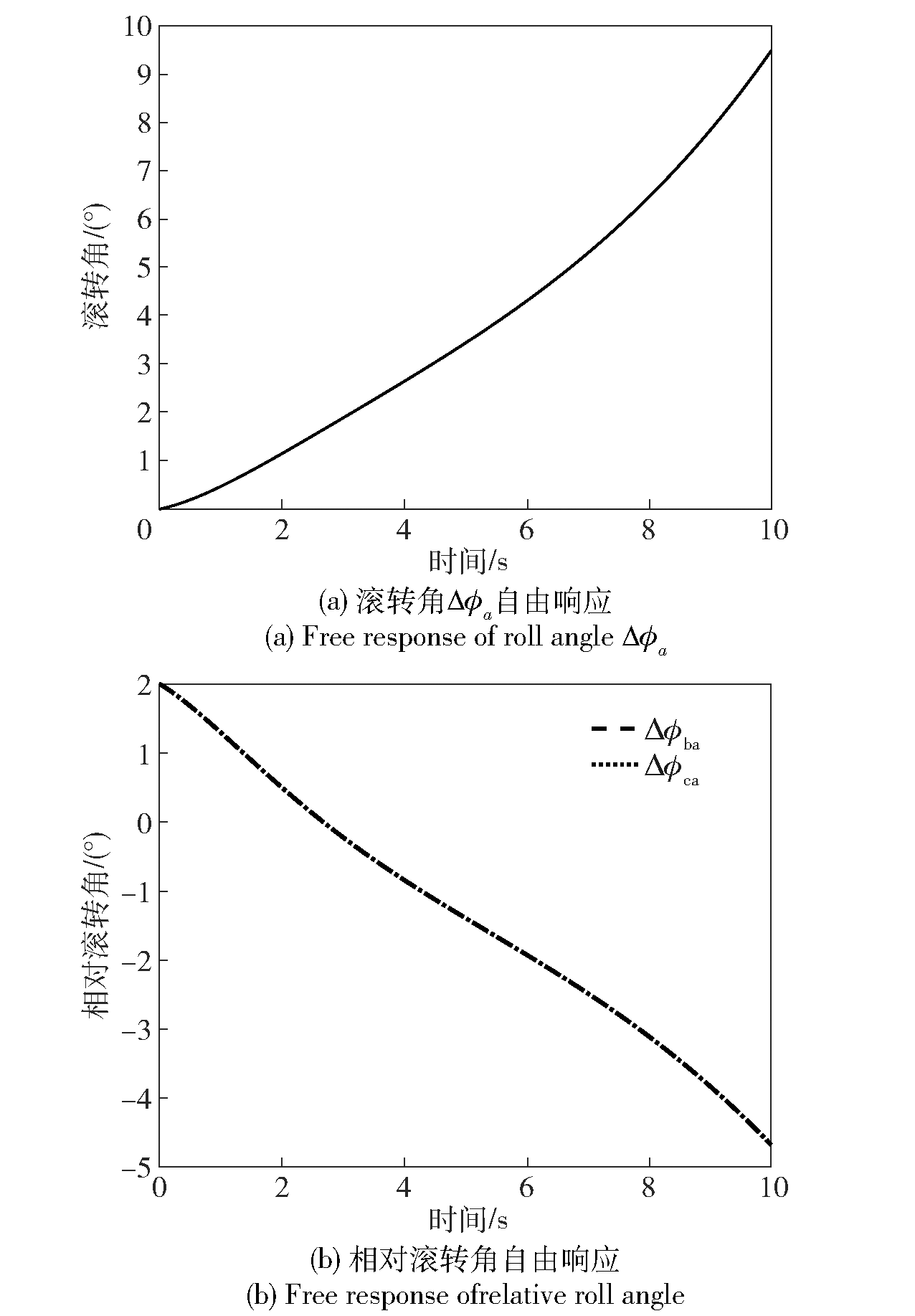
Fig.18 System free response under asymmetric disturbance at trim point 1
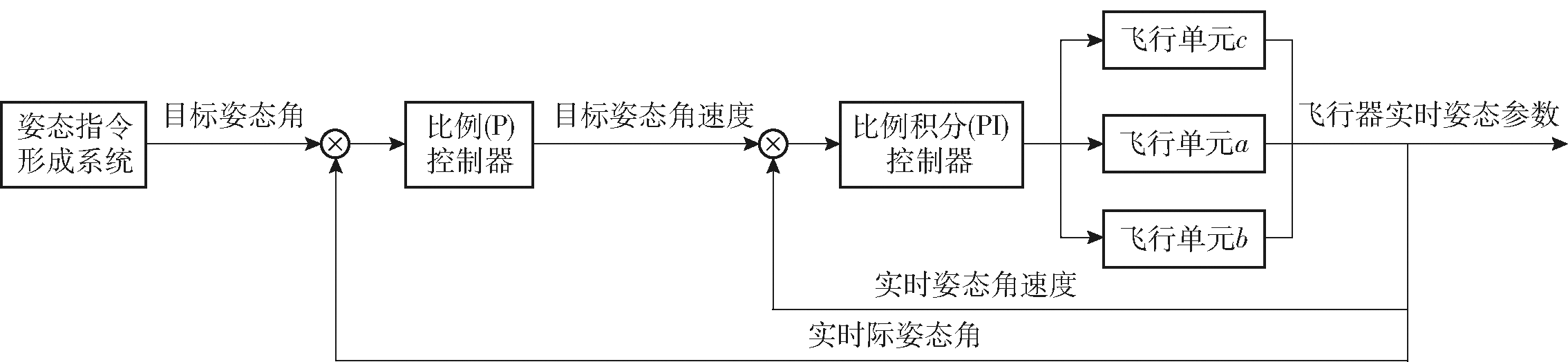
Fig.19 Diagram of design of stability augmentation control system
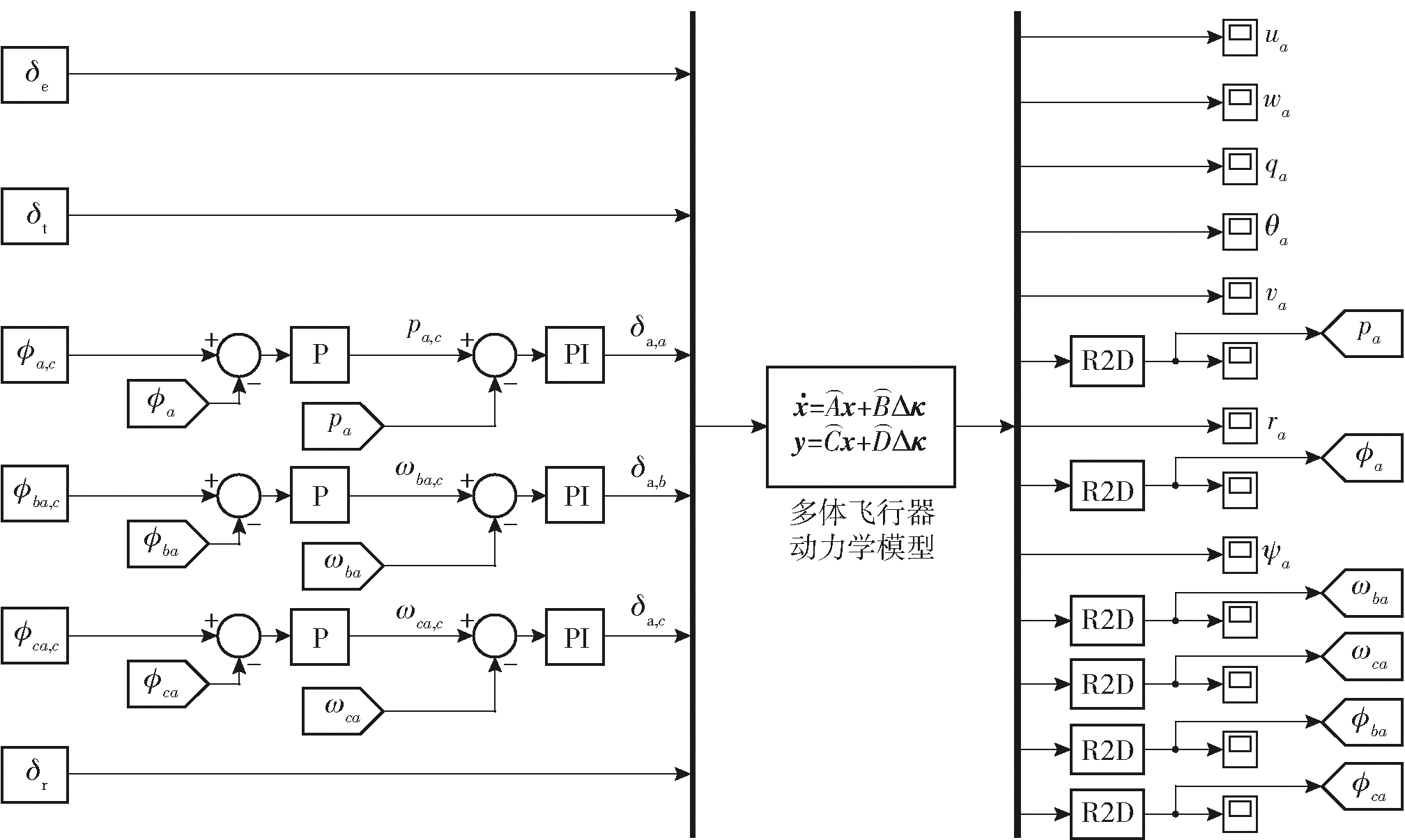
Fig.20 Diagram of Simulink simulation
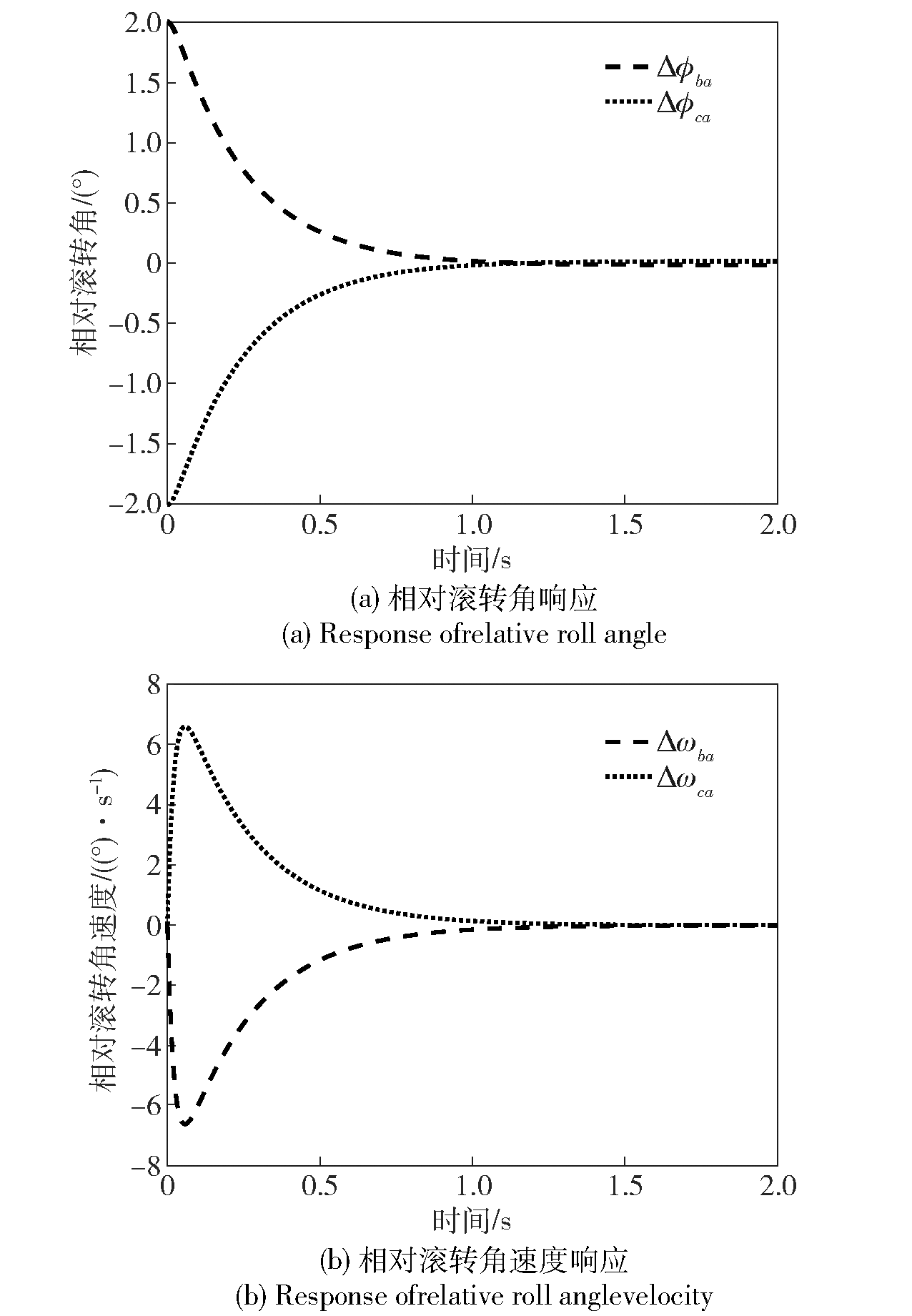
Fig.21 Response under symmetric disturbance at trim point 2 after stability augmentation control
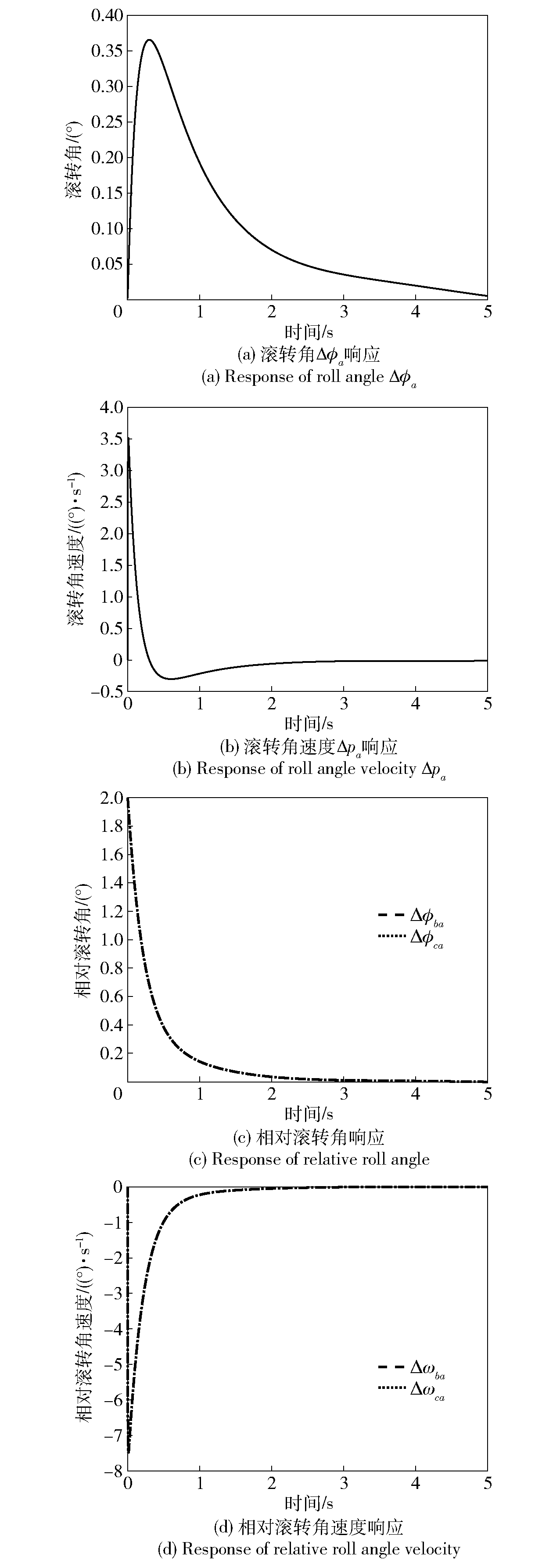
Fig.22 Response under asymmetric disturbance at trim point 1 after stability augmentation control
| [1] |
周伟, 马培洋, 郭正, 等. 基于翼尖链翼的组合固定翼无人机研究进展[J]. 航空学报, 2022, 43(9): 325946.
|
|
|
|
| [2] |
杨延平, 张子健, 应培, 等. 集群组合式柔性无人机:创新,机遇及技术挑战[J]. 飞行力学, 2021, 39(2):1-9, 15.
|
|
|
|
| [3] |
武明建. 变体太阳能无人机设计与能量优化[D]. 南京: 南京航空航天大学, 2018.
|
|
|
|
| [4] |
doi: 10.1016/j.ast.2020.106404 URL |
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
安朝, 谢长川, 孟杨, 等. 多体组合式无人机飞行力学稳定性分析及增稳控制研究[J]. 工程力学, 2021, 38(11):248-256.
|
|
|
|
| [10] |
刘东旭, 谢长川, 洪冠新. 翼尖铰接复合飞行器动力学特性研究[J]. 北京航空航天大学学报, 2021, 47(11):2311-2321.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
doi: 10.2514/1.C032634 URL |
| [14] |
|
| [15] |
|
| [16] |
张青斌, 高峰, 郭锐, 等. 动力翼伞系统拟坐标形式的多体动力学建模[J]. 兵工学报, 2019, 40(9):1935-1942.
doi: 10.3969/j.issn.1000-1093.2019.09.019 |
|
doi: 10.3969/j.issn.1000-1093.2019.09.019 |
|
| [17] |
高峰, 郭锐, 丰志伟, 等. 翼伞系统5段归航轨迹优化研究[J]. 兵工学报, 2020, 41(5):1025-1033.
doi: 10.3969/j.issn.1000-1093.2020.05.022 |
|
doi: 10.3969/j.issn.1000-1093.2020.05.022 |
|
| [18] |
蒋国江. 扑翼变形飞行器的动力学建模与飞行仿真[D]. 长沙: 国防科学技术大学, 2015.
|
|
|
|
| [19] |
郭锐. 翼伞系统多体动力学与试验[D]. 长沙: 国防科学技术大学, 2017.
|
|
|
|
| [20] |
|
| [21] |
doi: 10.1016/j.cja.2013.06.004 URL |
| [22] |
doi: 10.1016/j.cja.2016.10.010 URL |
| [23] |
刘沛清. 空气螺旋桨理论及其应用[M]. 北京: 北京航空航天大学出版社, 2006.
|
|
|
|
| [24] |
班度·N. 帕玛迪. 飞机的性能、稳定性、动力学与控制[M]. 商重阳, 左英桃, 夏露, 等, 译. 第2版. 北京: 航空工业出版社, 2013.
|
|
|
|
| [25] |
方振平, 陈万春, 张曙光. 航空飞行器飞行动力学[M]. 北京: 北京航空航天大学出版社, 2012.
|
|
|
|
| [26] |
阙志宏. 线性系统理论[M]. 西安: 西北工业大学出版社, 1995.
|
|
|
| [1] | XIAO Wangang, ZHOU Yunbo, FU Yaoyu, ZHANG Ming, ZHOU Jun, GE Jitao. Analysis of the Influence of Soil on the Maneuverability of Military Off-road Vehicles [J]. Acta Armamentarii, 2024, 45(1): 288-298. |
| [2] | ZHANG Qingbin, GAO Feng, GUO Rui, FENG Zhiwei, GE Jianquan. Multibody Dynamics Modeling of Powered Parafoil System Using Equations with Quasi-coordinates [J]. Acta Armamentarii, 2019, 40(9): 1935-1942. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||