
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (7): 2184-2196.doi: 10.12382/bgxb.2022.0229
Previous Articles Next Articles
SONG Qiuyu1, HU Jian1,2,*( ), YAO Jianyong1, BAI Yanchun1, YANG Zhengyin1
), YAO Jianyong1, BAI Yanchun1, YANG Zhengyin1
Received:2022-04-03
Online:2023-07-30
Contact:
HU Jian
SONG Qiuyu, HU Jian, YAO Jianyong, BAI Yanchun, YANG Zhengyin. Output Feedback Control for Launch Platform Using Neural Network Observer and Output Constraint[J]. Acta Armamentarii, 2023, 44(7): 2184-2196.
Add to citation manager EndNote|Ris|BibTeX
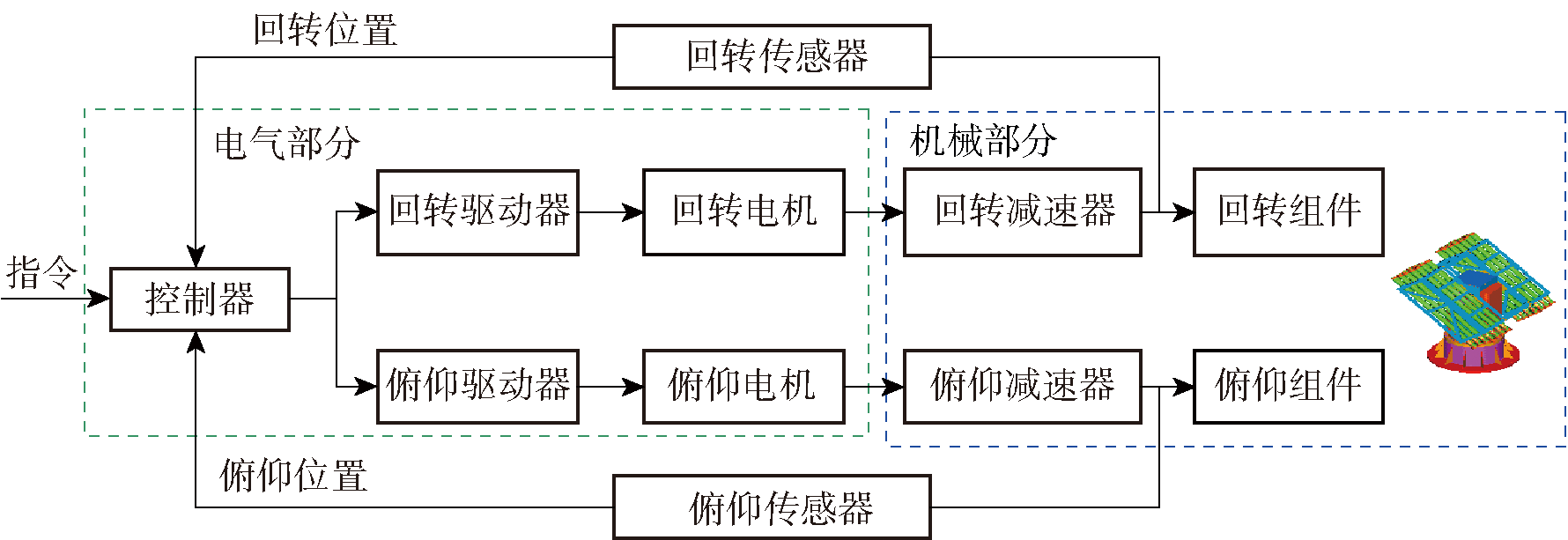
Fig.1 Block diagram of launch platform system

Fig.2 A spline CMAC neural network with three layers and two inputs-only the activated basis functions indexed by the input are illustrated

Fig.3 Assuming that the prediction is correct (the index moves from left to right): the index base function predicts that the next index cell will be on the right at time 1 (Fig. 3(a)); the original base function is still active at time 2 (Fig. 3(b)), which overlaps with the new base function on the index layer at time 2 (Fig. 3(c))
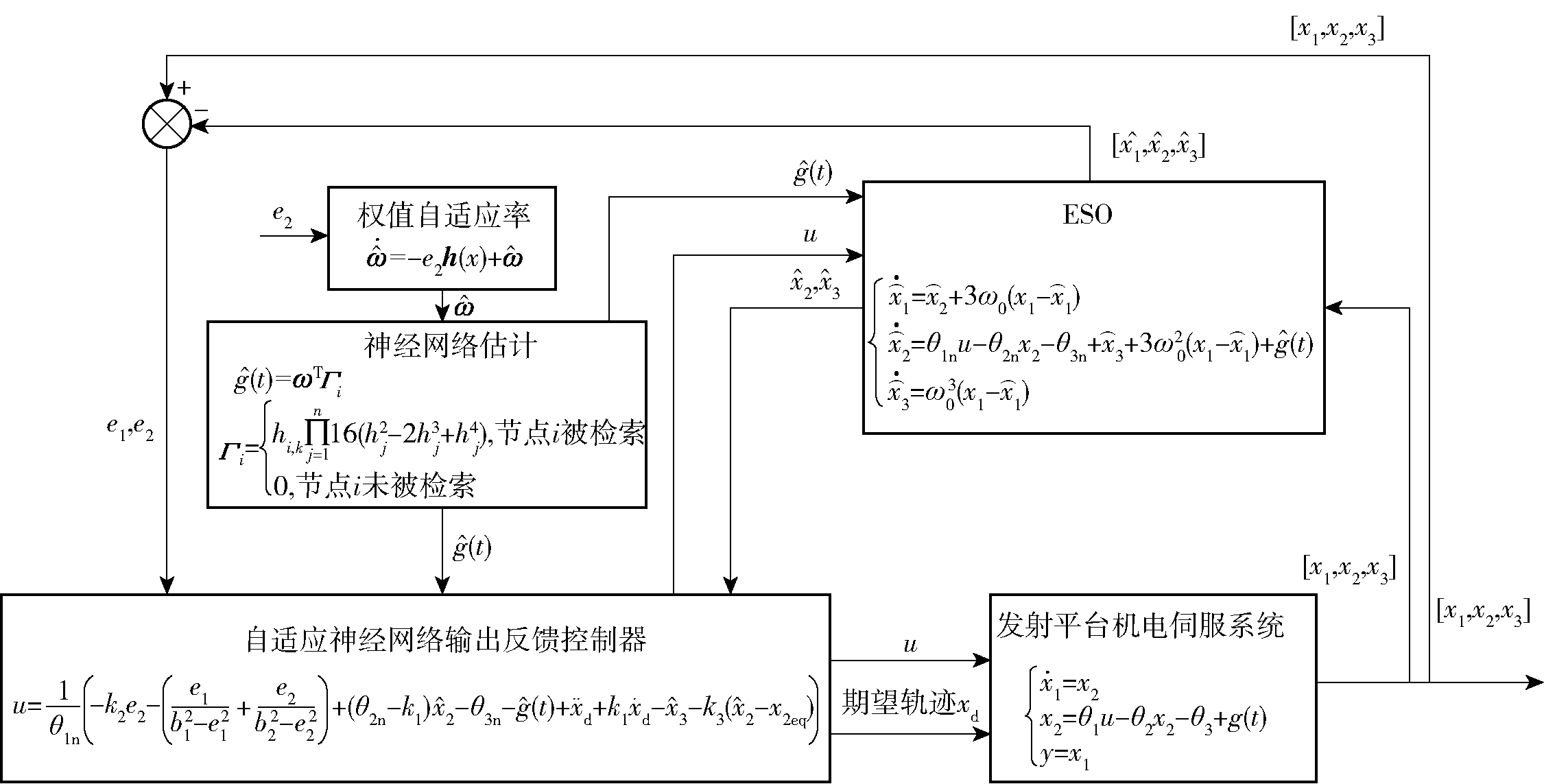
Fig.4 Control strategy diagram
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
Table 1 Parameter values of the electromechanical actuation system of the launch platform
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
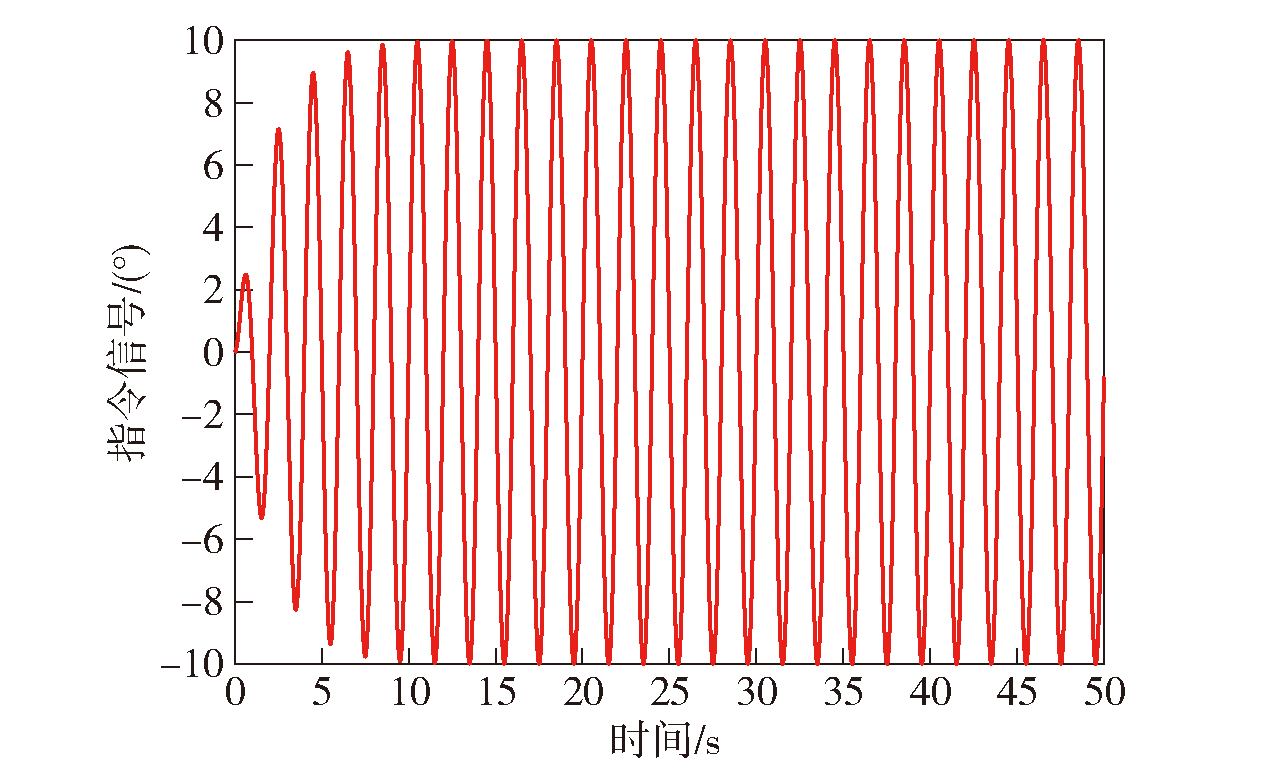
Fig.5 Output curve of the command signals
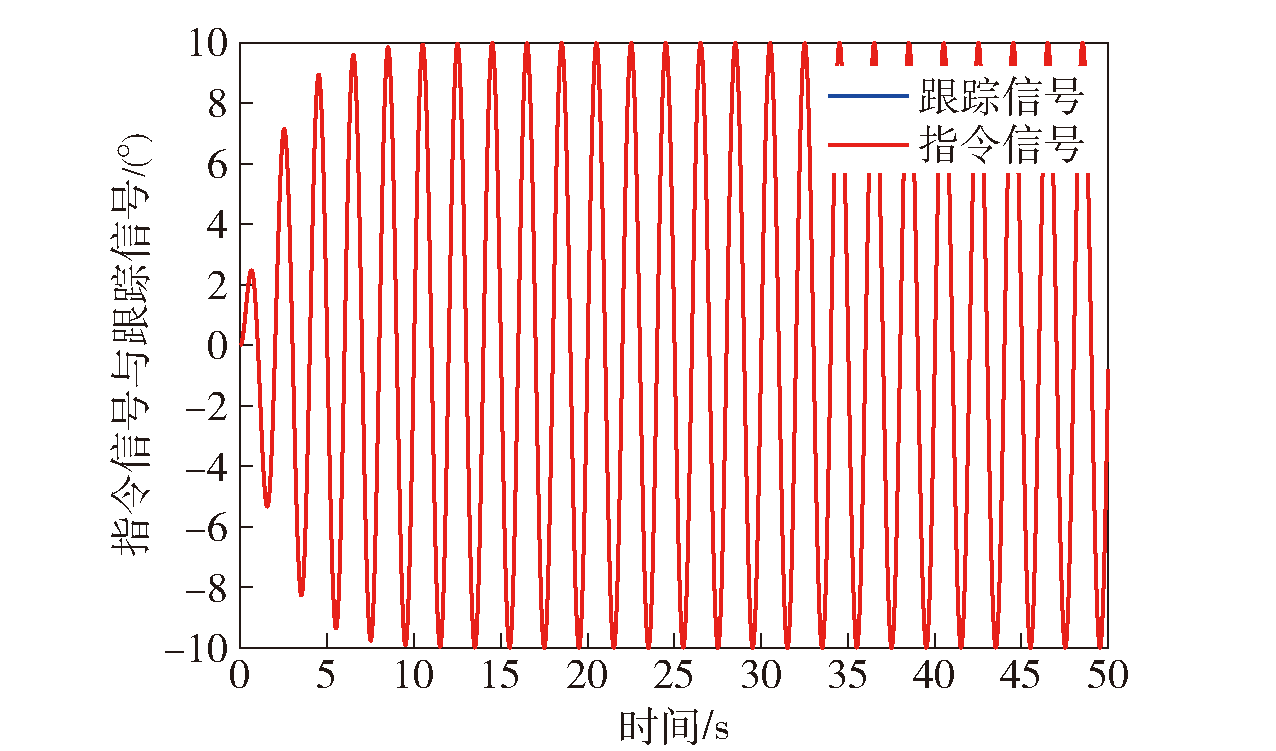
Fig.6 Position curve of OF_ESO_ Spline CMAC
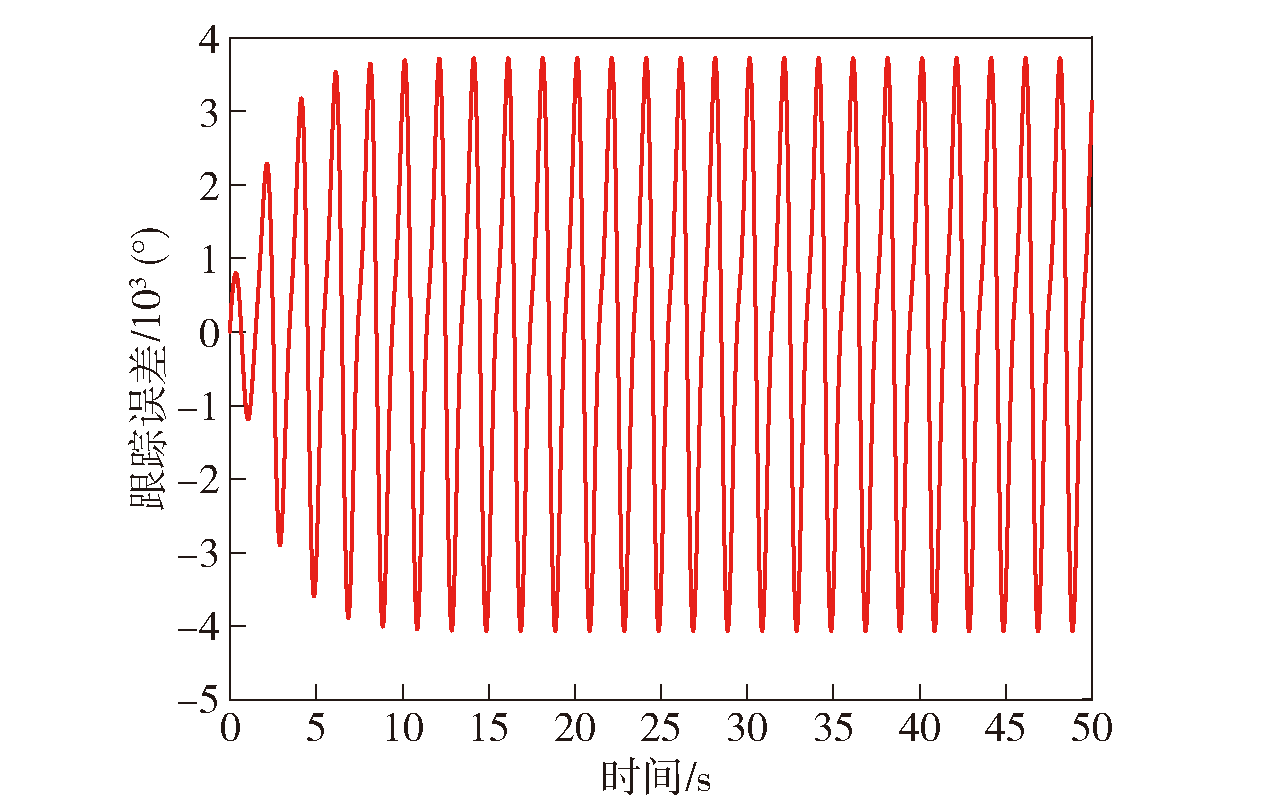
Fig.7 Tracking error of OF_ESO_ Spline CMAC
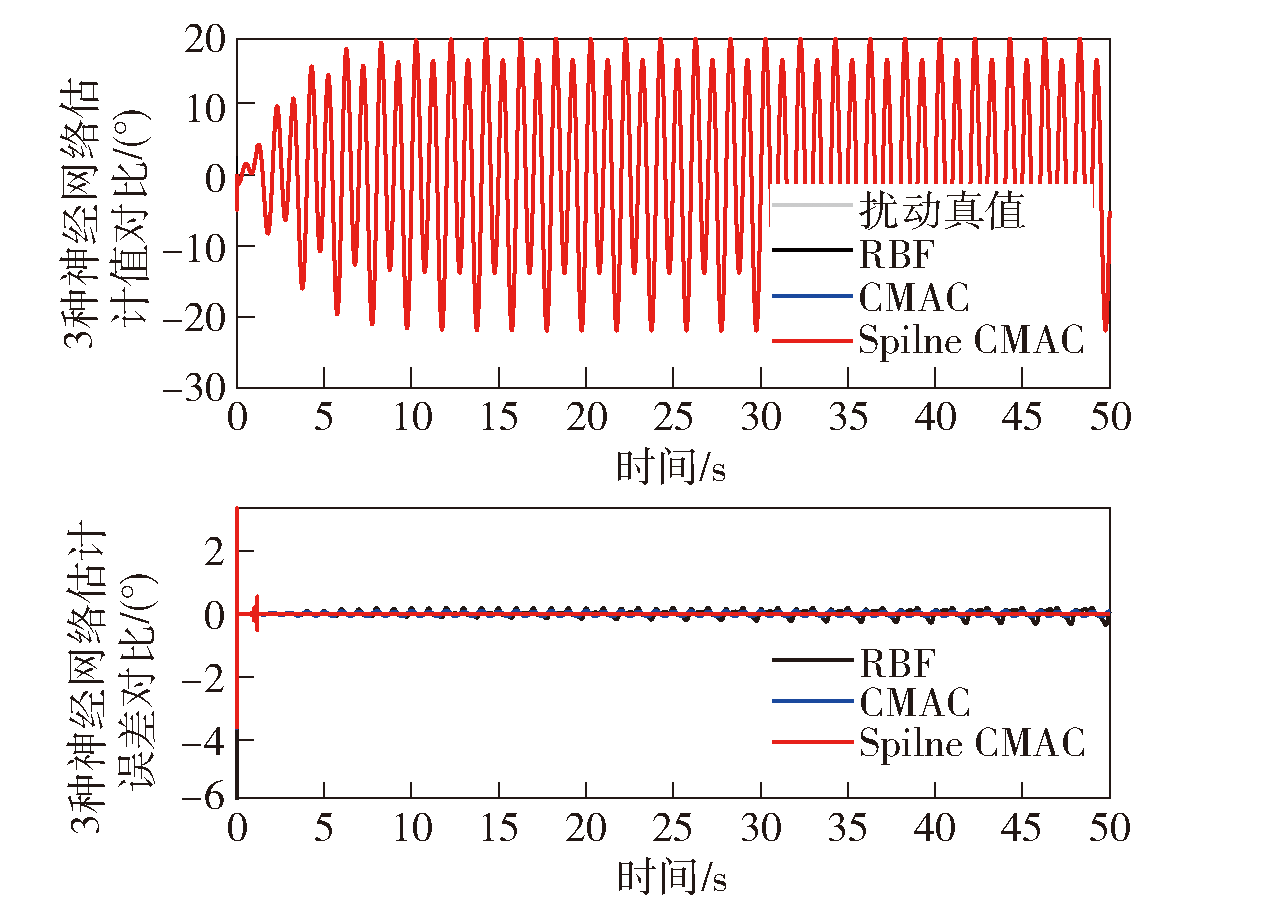
Fig.8 Comparison of three neural network estimates
| 控制器 | 最大值 | 平均值 | 标准方差 |
|---|---|---|---|
| OF_ESO | 0.01077 | 0.00299 | 0.005498 |
| OF_ESO_RBF | 0.006459 | 0.001493 | 0.003516 |
| OF_ESO_CMAC | 0.005864 | 0.001278 | 0.003234 |
| OF_ESO_ Spline CMAC | 0.003762 | 0.0003677 | 0.002393 |
Table 2 Simulation tracking error index (°)
| 控制器 | 最大值 | 平均值 | 标准方差 |
|---|---|---|---|
| OF_ESO | 0.01077 | 0.00299 | 0.005498 |
| OF_ESO_RBF | 0.006459 | 0.001493 | 0.003516 |
| OF_ESO_CMAC | 0.005864 | 0.001278 | 0.003234 |
| OF_ESO_ Spline CMAC | 0.003762 | 0.0003677 | 0.002393 |
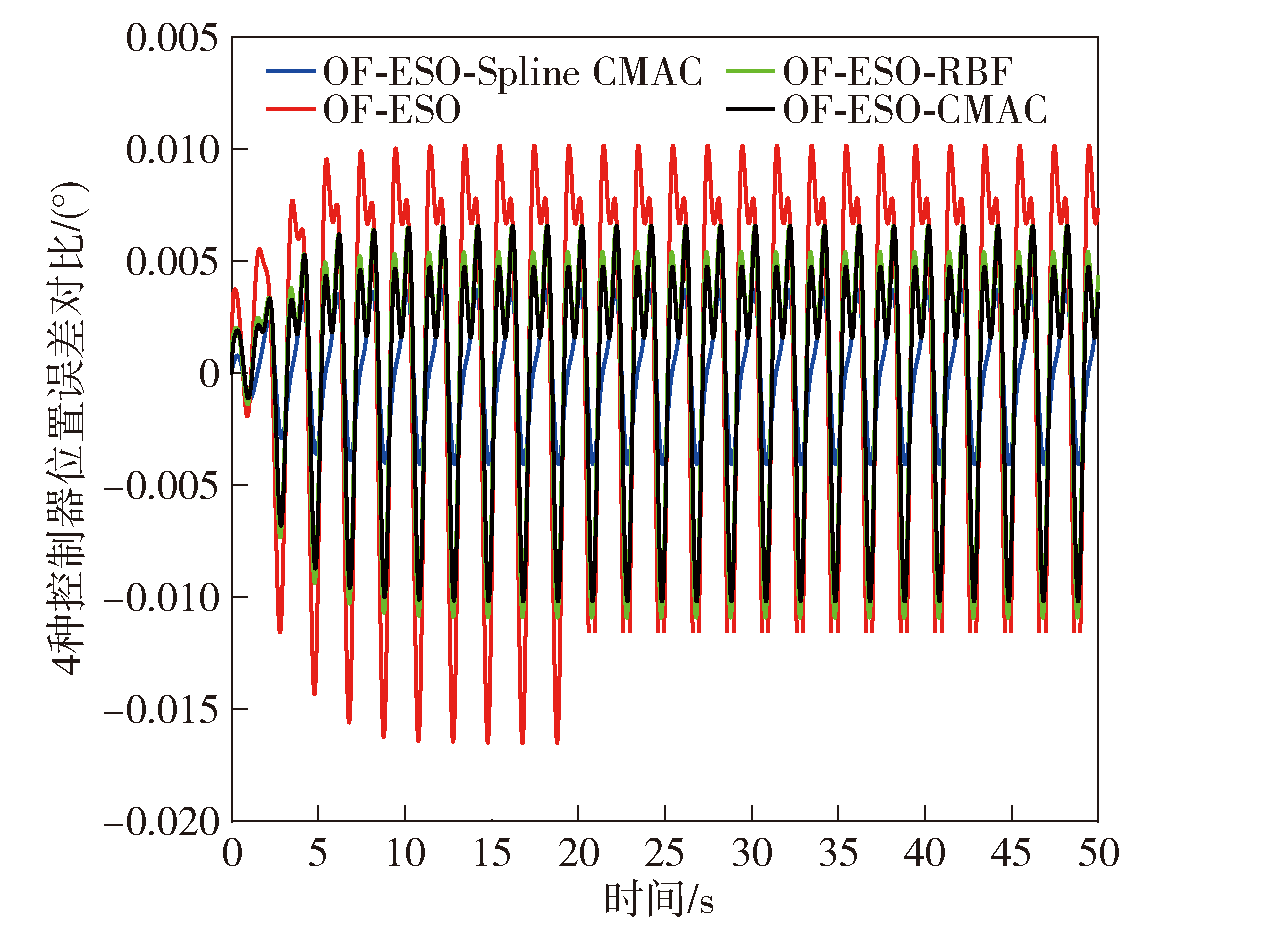
Fig.9 Comparison of tracking errors of four controllers

Fig.10 Launch platform and control circuit board based on DSP (the top is the launch platform, and the bottom is the control circuit board)
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
| 定子电阻R/Ω | 1.32 |
| 绕组电感L/H | 0.0311 |
| 额定电流I/A | 3.1 |
Table 3 System parameter values ofthe electromechanical actuation system of the launching platform
| 系统参数 | 数值 |
|---|---|
| 电机端转动惯量J/(kg·m2) | 0.031 |
| 电机力矩系数ku/(N·m·V-1) | 1.04 |
| 黏性摩擦系数B/(N·m·s·rad-1) | 0.035 |
| 减速比 | 190 |
| 定子电阻R/Ω | 1.32 |
| 绕组电感L/H | 0.0311 |
| 额定电流I/A | 3.1 |
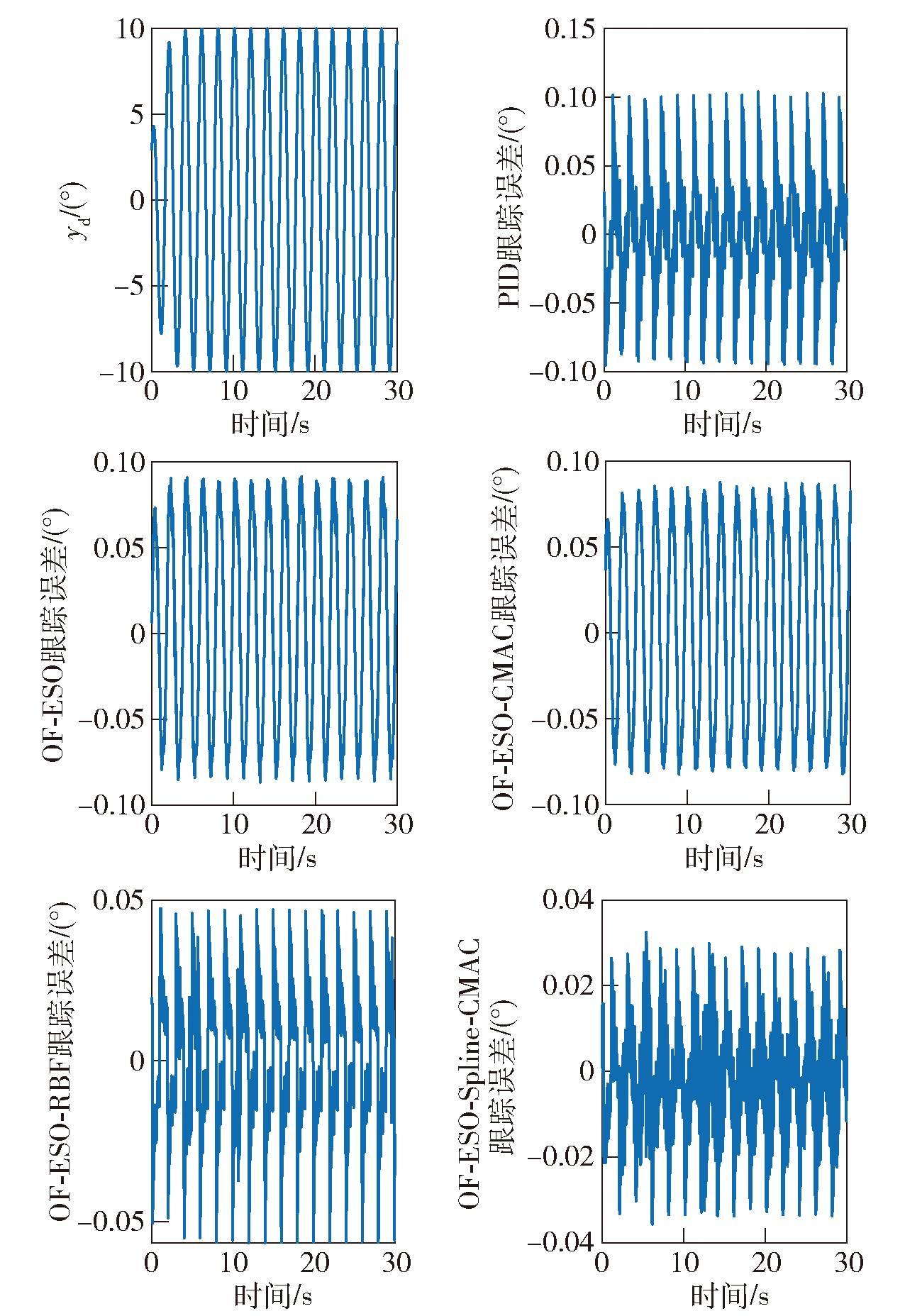
Fig.11 Comparison of tracking errors of five controllers under the working condition Ⅰ

Fig.12 Comparison of tracking errors of five controllers under the working condition Ⅱ

Fig.13 Comparison of tracking errors of five controllers under the working condition Ⅲ
| [1] |
李自勇, 戴田国, 马大为, 等. 新型火箭发射平台动力学仿真与优化研究[J]. 火炮发射与控制学报, 2008(1):39-41.
|
|
|
|
| [2] |
侯孝涵, 杨兴华, 杨喜军, 等. 基于新型趋近律的PMSM反馈线性化滑模控制[J]. 微电机, 2019, 52(12):45-48.
|
|
|
|
| [3] |
张海刚, 胡添添, 王步来, 等. 一种改进的PMSM滑模变结构控制策略研究[J]. 电气传动, 2019, 49(10):13-15.
|
|
|
|
| [4] |
doi: 10.1109/TIE.2010.2066535 URL |
| [5] |
韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M]. 北京: 国防工业出版社, 2008.
|
|
|
|
| [6] |
doi: 10.1109/TIE.2009.2024655 URL |
| [7] |
doi: 10.1109/TIE.2009.2036029 URL |
| [8] |
doi: 10.1109/TMECH.2010.2047652 URL |
| [9] |
doi: 10.1109/TIE.2011.2157276 URL |
| [10] |
朱玉川, 马大为, 李志刚, 等. 带积分项的火箭炮最优滑模伺服控制[J]. 兵工学报, 2007, 28(10):1272-1275.
|
|
|
|
| [11] |
柴华伟, 马大为, 李志刚, 等. 交流伺服系统最优内模滑模控制器设计与应用[J]. 南京航空航天大学学报, 2007, 39(4):510-513.
|
|
|
|
| [12] |
doi: 10.1109/TMECH.2012.2204765 URL |
| [13] |
doi: 10.1109/TIE.2008.2011621 URL |
| [14] |
|
| [15] |
郑颖, 马大为, 姚建勇, 等. 火箭炮两轴耦合位置伺服系统线性自抗扰控制[J]. 兵工学报, 2015, 36(6):987-993.
doi: 10.3969/j.issn.1000-1093.2015.06.004 |
|
doi: 10.3969/j.issn.1000-1093.2015.06.004 |
|
| [16] |
doi: 10.1016/j.neucom.2017.05.011 URL |
| [17] |
|
| [18] |
侯捷, 陈谋, 刘楠. 基于径向基函数神经网络与扩张状态观测器的无人直升机控制[J]. 控制理论与应用, 2021, 38(9): 1361-1371.
|
|
|
|
| [19] |
李彬, 徐怡杭, 罗杰. 采用残差神经网络的无人机遥控信号识别监测算法[J]. 西安交通大学学报, 2021, 55(12):146-154.
|
|
|
|
| [20] |
doi: 10.1115/1.3426923 URL |
| [21] |
|
| [22] |
doi: 10.1016/j.fss.2008.03.021 URL |
| [23] |
陈强, 丁科新, 南余荣. 带有输出约束的柔性关节机械臂预设性能自适应控制[J]. 控制与决策, 2021, 36(2):387-394.
|
|
|
| [1] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||