
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (4): 1023-1033.doi: 10.12382/bgxb.2021.0873
Previous Articles Next Articles
ZHAO Fei1,2( ), LOU Wenzhong1,2,*(), FENG Huanzhen1,2, SU Zilong1,2, WANG Jinkui1,2, XUAN Weikun1,2
), LOU Wenzhong1,2,*(), FENG Huanzhen1,2, SU Zilong1,2, WANG Jinkui1,2, XUAN Weikun1,2
Received:2021-12-27
Online:2023-04-28
Contact:
LOU Wenzhong
ZHAO Fei, LOU Wenzhong, FENG Huanzhen, SU Zilong, WANG Jinkui, XUAN Weikun. Long-Distance Aerial Target Detection Technology of Counter-UAV Image Seeker[J]. Acta Armamentarii, 2023, 44(4): 1023-1033.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Schematic diagram of ballistic flight of counter-UAV guided munitions

Fig.2 Block diagram of UAV target detection algorithm
Fig.3 Typical median filter windows
Fig.4 Median filter processing effects
Fig.5 Sliding window model
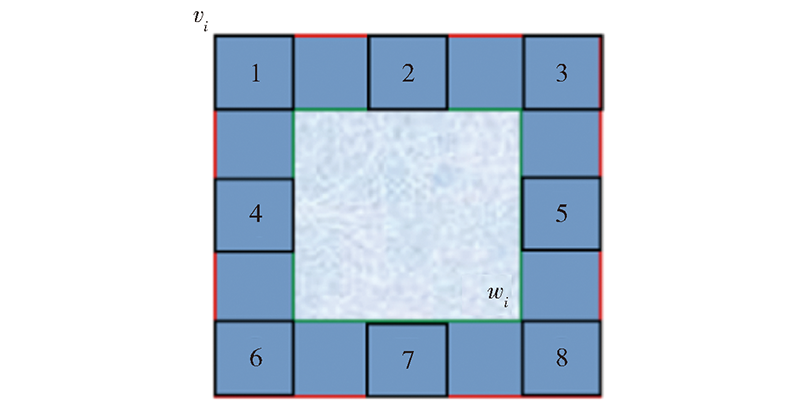
Fig.6 Image patches vi and wi
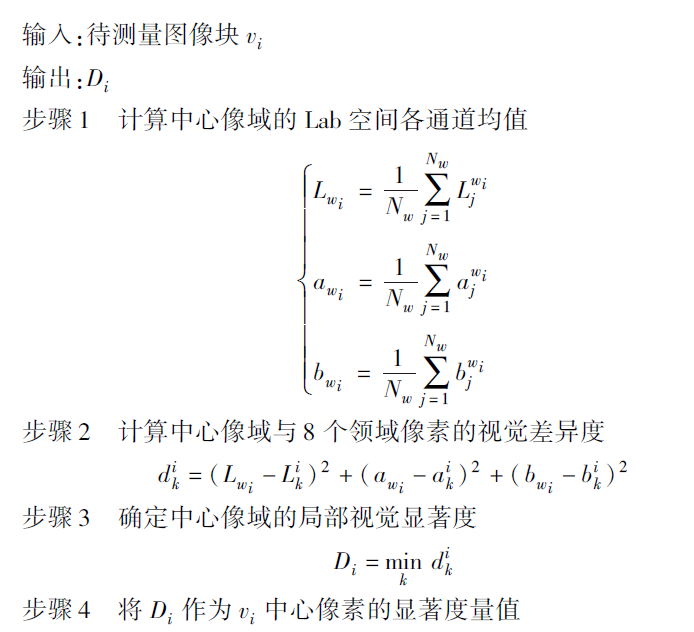
Fig.7 Local visual saliency measurement algorithm
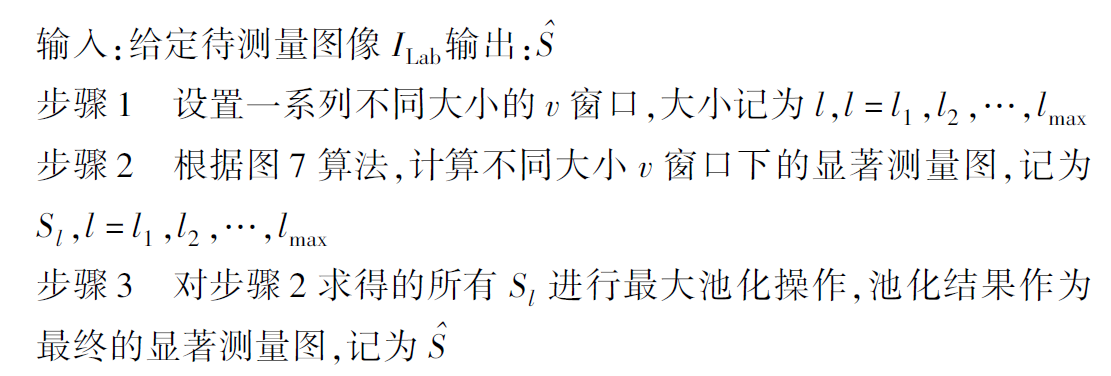
Fig.8 Multi-scale pixel domain measurement algorithm
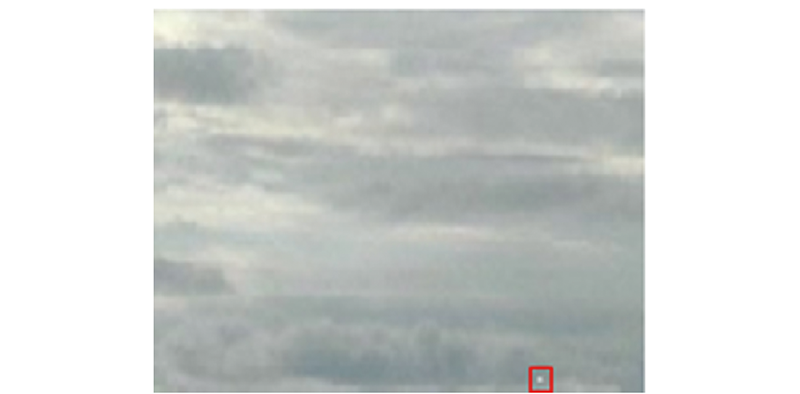
Fig.9 RGB image to be detected

Fig.10 Multi-scale saliency measurement maps
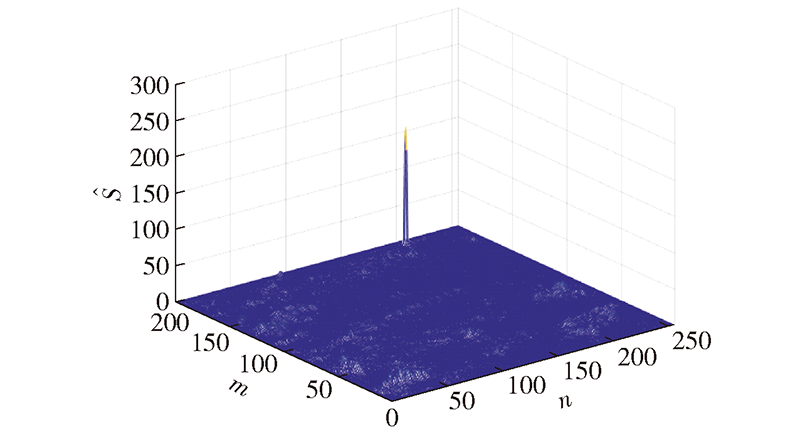
Fig.11 Multi-scale measurement graph pooling results $\hat{S}$
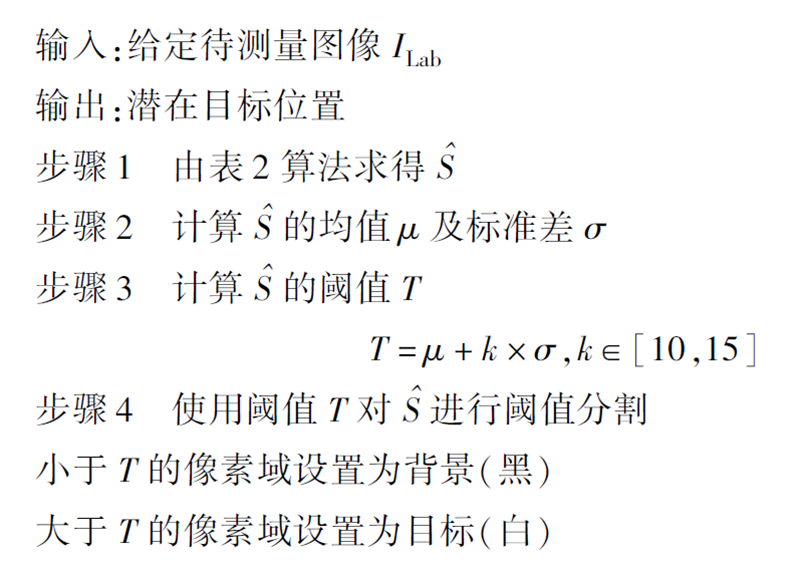
Fig.12 Thresholding search algorithm

Fig.13 Dual-target image
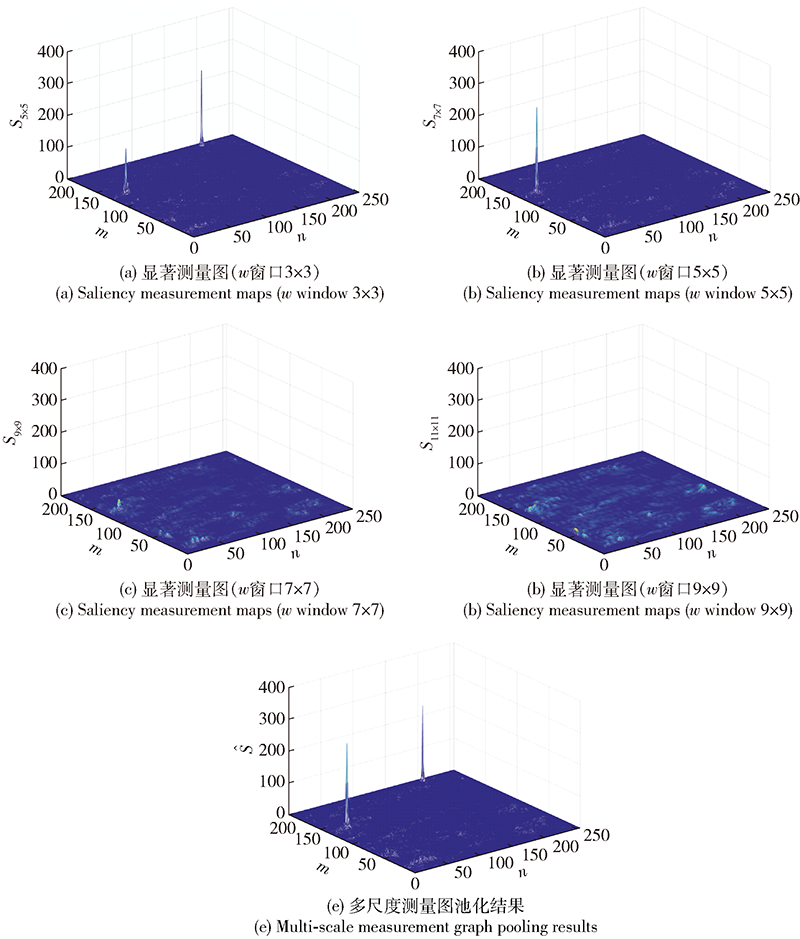
Fig.14 Saliency measurement maps of two targets
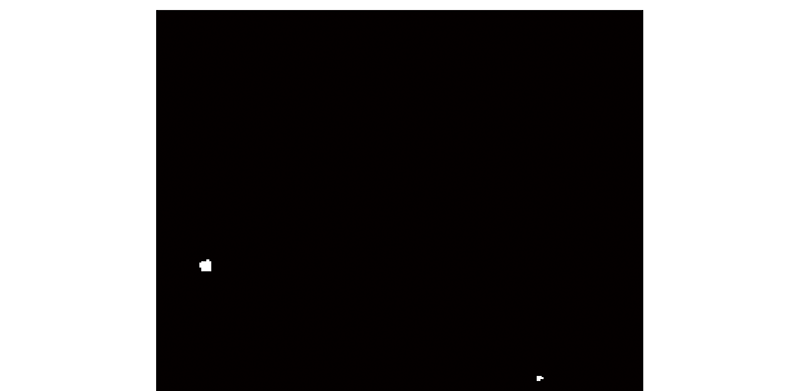
Fig.15 Thresholding binary image
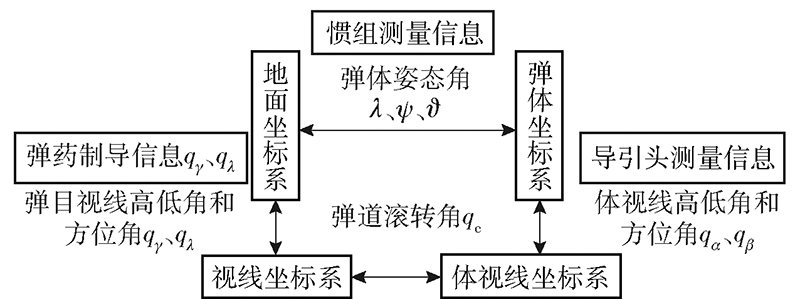
Fig.16 Guidance information diagram
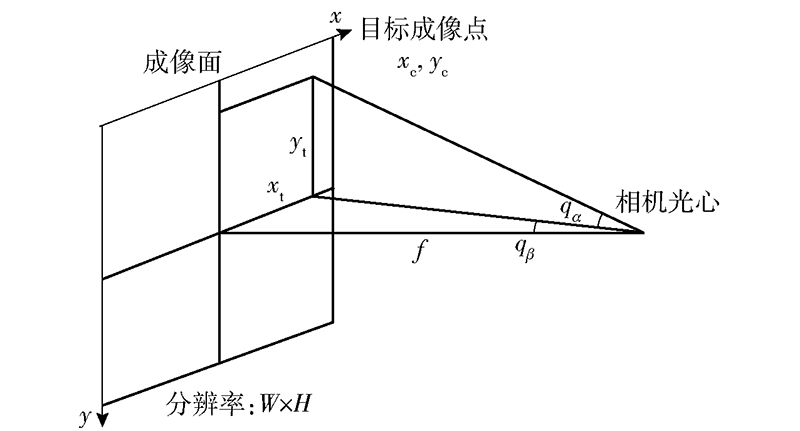
Fig.17 Target imaging geometric model
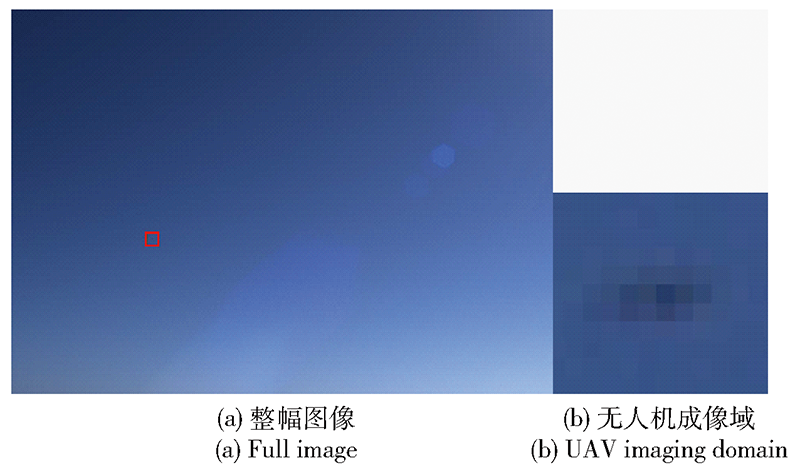
Fig.18 Long-distance UAV imaging frame

Fig.19 Synthetic image

Fig.20 Test prototype
| 视频 序号 | 帧数 | 单帧大小 | 目标大小 | 速度/ (帧·s-1) | 准确度/ % |
|---|---|---|---|---|---|
| 1 | 50 | 640×512 | <10×10 | 8 | 100 |
| 2 | 50 | 640×512 | <10×10 | 8 | 100 |
| 3 | 50 | 640×512 | <10×10 | 8 | 100 |
| 4 | 50 | 640×512 | <10×10 | 8 | 100 |
| 5 | 50 | 640×512 | <10×10 | 8 | 100 |
Table 3 Test data description
| 视频 序号 | 帧数 | 单帧大小 | 目标大小 | 速度/ (帧·s-1) | 准确度/ % |
|---|---|---|---|---|---|
| 1 | 50 | 640×512 | <10×10 | 8 | 100 |
| 2 | 50 | 640×512 | <10×10 | 8 | 100 |
| 3 | 50 | 640×512 | <10×10 | 8 | 100 |
| 4 | 50 | 640×512 | <10×10 | 8 | 100 |
| 5 | 50 | 640×512 | <10×10 | 8 | 100 |
| [1] |
doi: 10.1109/ACCESS.2021.3065926 URL |
| [2] |
|
| [3] |
doi: 10.1109/TIP.2020.3043113 pmid: 33315561 |
| [4] |
张永梅, 赖裕平, 马健喆, 等. 基于视频的装甲车和飞机检测跟踪及轨迹预测算法[J]. 兵工学报, 2021, 42(3):545-554.
doi: 10.3969/j.issn.1000-1093.2021.03.010 |
|
|
|
| [5] |
梁杰, 李磊, 任君, 等. 基于深度学习的红外图像遮挡干扰检测方法[J]. 兵工学报, 2019, 40(7):1401-1410.
doi: 10.3969/j.issn.1000-1093.2019.07.009 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.009 |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
doi: 10.1109/TGRS.2013.2242477 URL |
| [10] |
doi: 10.1049/ipr2.v11.11 URL |
| [11] |
吴一全, 罗子娟. 基于最小二乘支持向量机时域背景预测的红外弱小目标检测[J]. 兵工学报, 2010, 31(6):678-684.
|
|
|
|
| [12] |
刘德鹏, 李正周, 曾靖杰, 等. 基于多尺度局部对比度和多尺度梯度一致性的红外小弱目标检测算法[J]. 兵工学报, 2018, 39(8):1526-1535.
doi: 10.3969/j.issn.1000-1093.2018.08.009 |
|
|
|
| [13] |
doi: 10.1109/JSTARS.4609443 URL |
| [14] |
于劲松, 万九卿, 高秀林. 红外图像弱小点目标检测技术研究[J]. 兵工学报, 2008, 29(12):1518-1521.
|
|
|
|
| [15] |
doi: 10.1109/TNNLS.5962385 URL |
| [16] |
doi: 10.1109/TCYB.6221036 URL |
| [17] |
doi: 10.2478/jaiscr-2014-0001 URL |
| [18] |
吴青青, 许廷发, 闫辉, 等. 复杂背景下的颜色分离背景差分目标检测方法[J]. 兵工学报, 2013, 193(4):501-506.
|
|
|
|
| [19] |
|
| [20] |
王荔豪, 杨凯, 马菲, 等. 基于捷联导引头的制导信息解耦及滤波方法[J]. 计算机测量与控制, 2020, 28(4):142-145.
|
|
|
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||